一种基于浮标的潮位观测及预报方法
文献发布时间:2023-06-19 12:24:27
技术领域
本发明涉及海洋潮汐观测领域,特别涉及一种基于浮标的潮位观测及预报方法。
背景技术
海洋潮位数据是重要的海洋水文观测要素。潮位的精准化测量和预报对航海运输、海洋工程、防灾减灾、海洋渔业、科学研究尤其是海洋军事活动等都具有十分重要的应用价值。为了更加精准地掌握潮位数据,广大研究者和海事相关部门付出了巨大的努力,并取得了一定的成果。
例如,利用验潮站等方式对近海区域的潮位进行实时观测、记录,同时利用预测模型为广大需求者进行预测预报,但是其局限性也是显而易见的,验潮站对选址、设备精度等都有较高的要求。目前测量潮位主要采用潮位测量仪,根据工作原理不同,主要可分为浮子式和压力式;根据布设位置的不同,可分为岸基和离岸两种。近年,对精准的离岸潮位观测需求越来越大。
离岸潮位观测目前主要有压力式潮位仪、卫星高度计和和GNSS潮位观测浮标等,其中,GNSS潮位观测浮标机动灵活、价格低廉、数据丰富,结合卫星通信/移动互联网易实现离岸潮位的遥测遥报,因此不断完善中的GNSS潮位观测浮标观测将是离岸潮位观测的必然趋势。
潮位预报都是基于潮位观测数据,现有的浮标只能对潮位进行观测,观测的大批量数据需要发送到岸站进行潮位的预报,无法实时对潮位进行精确预报。
发明内容
为解决上述技术问题,本发明提供了一种基于浮标的潮位观测及预报方法,以达到利用浮标在潮位观测的同时,进行潮位的预报,并且能实时修正调和常数,进行更为准确的预报的目的。
为达到上述目的,本发明的技术方案如下:
一种基于浮标的潮位观测及预报方法,包括潮位观测和潮位预报,所述潮位观测包括如下步骤:
(1.1)将浮标布放至指定海域,浮标顶部的GNSS天线接收卫星信号;
(1.2)浮标上的数据采集器根据接收到的卫星信号求解浮标水平坐标和GNSS天线相位中心高程序列,得到浮标水平坐标即获得浮标所在海域;
(1.3)浮标上的压力测深传感器测量浮标的动态吃水深度序列;
(1.4)数据采集器根据GNSS天线相位中心高程序列、浮标的动态吃水深度序列以及姿态传感器获得的浮标姿态数据计算浮标所在海域的海面高程序列;
(1.5)数据采集器对海面高程序列进行处理得到浮标所在海域潮位的逐时潮位序列;
所述潮位预报包括如下步骤:
(2.1)待观测的数据积累到一定的时间周期开始潮位预报,首先将已获取的逐时潮位序列分解为不同分潮的叠加,分析计算各个分潮的调和常数,然后使用计算得到的调和常数来计算未来时间的各个分潮的潮位并进行叠加,从而实现对未来潮位的预报;
(2.2)使用最近第二天的实测潮位对预报潮位进行质量评估,若预报潮位不符合要求,则增加观测的数据进行新的调和常数的计算,然后使用新的调和常数来进行潮位预报。
上述方案中,步骤(1.4)中,海面高程序列
其中,
上述方案中,步骤(1.5)中,处理的方法包括如下步骤:
(1)计算每分钟海面高程序列的平均值,得到时间间隔为1分钟的潮位序列,计算公式为:
其中,
(2)以数据量为300的窗口对逐分钟的潮位序列做滑动平均,计算公式为:
其中,
(3)在逐分钟潮位序列中提取时间为整小时的潮位,即逐时潮位
上述方案中,步骤(2.1)的具体方法如下:
首先,对观测的逐时潮位进行分解,分解公式如下:
其中,
其中,
通过最小二乘法求得傅里叶系数
通过傅里叶系数求得调和常数,计算公式如下:
将调和常数代入潮位分解公式(4),公式内只有时刻
上述方案中,步骤(2.2)的具体方法如下:
使用调和常数计算完成后的24个逐时实测潮位和对应时刻的逐时预报潮位之间的差值的均方差来评价潮位预报的质量,计算公式为:
其中,
上述方案中,当浮标的观测潮位资料的数据长度
若浮标的观测潮位资料的数据长度
若浮标观测潮位资料的数据长度
上述方案中,在进行计算之前需要对GNSS天线相位中心高程序列、浮标动态吃水深度序列以及压力测深传感器的数据进行数据预处理,数据预处理时将数据进行逐分钟分段处理,然后对逐分钟数据先后进行首次运算和第二次运算,首次运算包括如下步骤:
步骤1,计算本段数据序列的算术平均值;
步骤2,计算本段数据序列的标准差;
步骤3,计算本段数据序列中每个数据的标志值;
步骤4,将每个数据的标志值与临界值进行比较,如果标志值大于临界值,则剔除该数据,否则,保留该数据。
进一步的技术方案中,第二次运算包括如下步骤:
步骤1,将本段数据按照从小到大的顺序排列;
步骤2,计算第一个数据的标志值;
步骤3,将第一个数据的标志值与临界值进行比较,如果标志值大于临界值,则剔除第一个数据并重新排序,如果标志值小于临界值,则保留第一个数据继续计算剩余每个数据的标志值;
步骤4,将每个数据的标志值与临界值进行比较,如果标志值大于临界值,则剔除该数据并重新排序,如果标志值小于临界值,则保留该数据。
通过上述技术方案,本发明提供的基于浮标的潮位观测及预报方法具有如下有益效果:
本发明利用浮标在观测潮位的同时,进行潮位预报,并且在预报过程中,不断地利用新观测的数据来计算新的调和常数,并利用新的调和常数来预报潮位,根据实测潮位和预报潮位来评价预报的质量,从而选择预报更为准确的调和常数,达到提高潮位预报准确度的目的。
本发明利用GNSS潮位观测浮标机动灵活、价格低廉,可以在任意海域开展潮位观测工作,将GNSS潮位观测浮标技术与潮位预报技术相结合,既可以大幅度降低浮标向岸边回传数据的卫星通信费用,又可以实现海洋中任意点的潮位预报功能。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
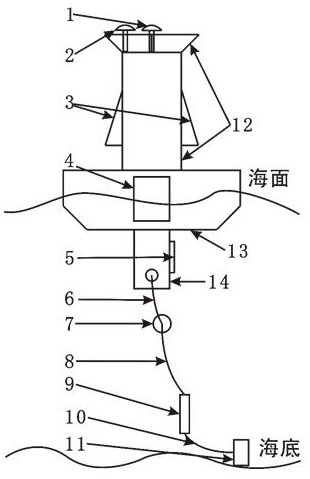
图1为本发明实施例所公开的潮位观测和预报的浮标结构示意图;
图2为本发明实施例所公开的潮位观测流程图;
图3为本发明实施例所公开的数据预处理的首次运算流程;
图4为本发明实施例所公开的数据预处理的二次运算流程;
图5为本发明实施例中潮位观测步骤1.2中,浮标上的数据采集器求解得到的GNSS天线相位中心高程序列;
图6为本发明实施例中姿态传感器得到的浮标横滚角的观测序列;
图7为本发明实施例中姿态传感器得到的浮标俯仰角的观测序列;
图8为本发明实施例中潮位观测步骤1.5中,数据采集器对海面高程序列进行处理得到浮标所在海域潮位的25天的逐时潮位序列;
图9为本发明实施例预报的第26天(观测后第二天)潮位;
图10为本发明实施例观测的第26天的潮位。
图中,1、GNSS天线;2、通信终端;3、太阳能板;4、仪器舱;5、压力测深传感器;6、锚绳一;7、浮球;8、锚绳二;9、声学释放器;10、锚链;11、锚块;12、上架;13、浮体;14、下架。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
本发明提供了一种基于浮标的潮位观测及预报方法,包括潮位观测和潮位预报。
潮位观测由集成在浮标中的GNSS潮位观测模块实现;潮位预报通过高性能浮标数据采集处理器完成。该方法由浮标硬件和潮位观测、分析和预报软件组成。
浮标组成图如图1所示,浮标硬件包括依次连接的上架12、浮体13、仪器舱4、下架14和锚系组成。上架12主要安装通信终端2(北斗、铱星、4G可选)、GNSS天线1、太阳能板3等。GNSS天线1的相位中心需要安装于浮标的垂向中轴线上。
浮体13形状为直径3m圆盘,采用PE材料,表面喷涂聚脲,保证浮体13具有足够的强度和防腐性能,浮体13内有仪器舱4,仪器舱4内安装数据采集器、姿态传感器、太阳能充电控制器和电池组。
下架14安装压力测深传感器5和浮标与锚系的连接装置。锚系由锚绳一6、浮球7、锚绳二8、声学释放器9、锚链10和锚块11组成。
其中,通信终端2用于浮标接收指令和分发数据。GNSS天线1接收GNSS系统(包括北斗系统、GPS系统和伽利略系统)发送至海面的卫星信号和星站差分信号并传送至数据采集器。数据采集器需采用X86架构的处理器,保证其有足够的性能进行潮位观测、分析和预报。数据采集器主要功能包括:
a.接收GNSS信号和星站差分信号并进行调制解调,解算出浮标的实时水平坐标和GNSS天线相位中心处的高程(高程基准为WGS84),该数据的更新率为5Hz;
b.采集辅助传感器的数据,用于校正浮标测量的海面高程数据。辅助传感器包括姿态传感器和压力测深传感器,姿态数据包括俯仰角度、横滚角度和浮标航向,这三种数据更新率为5Hz,用于校正浮标倾斜引起的测量误差。压力测深传感器反映浮标的动态吃水,该数据的更新率为5Hz,用于校正浮标测量的海面高程数据;
c.对实测潮位数据进行调和分析,并进行结果检验,将通过检验的调和常数进行保存和通过通信终端进行分发,用于浮标和其他用户开展潮汐预报工作。
随着观测时间的增长,以固定的周期通过向后预报的方式将调和常数计算的潮位与实测潮位进行对比来验证调和常数的准确性,当调和常数的准确性下降到一定阈值,则使用更长的潮位观测序列计算新的调和常数。
本发明中的数据采集器是整个系统的基础,它既是一款具备多接口的嵌入式采集器,能够和GNSS传感器、压力测深传感器和通信终端进行数据通信,又具备足够的运算能力进行潮汐预报等复杂的数据运算,保证了浮标平台下潮汐观测和预报方法的实施。
一、潮位观测包括如下步骤,如图2所示:
(1.1)将浮标布放至指定海域,浮标顶部的GNSS天线接收卫星信号;
GNSS天线接收的卫星信号包括差分信号和观测信号,差分信号为:“中国精度”星基高精度增强服务系统通过L波段向地面发送的差分信号,观测信号为:GPS:L1 CA/L1 P/L1C/L2P/L2C,GLONASS:G1/G2、P1/P2,BeiDou:B1/B2/B3。
(1.2)浮标上的数据采集器根据接收到的卫星信号求解浮标水平坐标和GNSS天线相位中心高程序列(如图5所示),得到浮标水平坐标即获得浮标所在海域;
得到的浮标的水平坐标和天线相位中心高程数据格式为(
(1.3)浮标上的压力测深传感器测量浮标的动态吃水深度序列;
压力测深传感器用于测量浮标的动态吃水深度△
(1.4)数据采集器根据GNSS天线相位中心高程序列、浮标的动态吃水深度序列以及姿态传感器获得的浮标姿态数据(包括图6所示的横滚角观测序列和图7所示的俯仰角观测序列)计算浮标所在海域的海面高程序列;
海面高程序列
其中,
(1.5)数据采集器对海面高程序列进行处理得到浮标所在海域潮位的逐时潮位序列,处理后25天的潮位数据如图8所示;
处理的方法包括如下步骤:
(1)计算每分钟海面高程序列的平均值,得到时间间隔为1分钟的潮位序列,计算公式为:
其中,
(2)以数据量为300的窗口对逐分钟的潮位序列做滑动平均,计算公式为:
其中,
(3)在逐分钟潮位序列中提取时间为整小时的潮位,即逐时潮位
在进行计算之前需要对GNSS天线相位中心高程序列
首次运算流程如图3所示,包括如下步骤:
步骤1,计算本段数据序列的算术平均值,计算公式为:
其中,
步骤2,计算本段数据序列的标准差,标准差的计算公式为:
步骤3,计算本段数据序列中每个数据的标志值,标志值的计算公式为:
其中,
步骤4,将每个数据的标志值与临界值进行比较,根据逐分钟数据数量,临界值选择为3.34,如果标志值大于临界值,则剔除该数据,否则,保留该数据。
第二次运算流程如图4所示,包括如下步骤:
步骤1,将本段数据按照从小到大的顺序排列;
步骤2,计算第一个数据的标志值;
步骤3,将第一个数据的标志值与临界值进行比较,如果标志值大于临界值,则剔除第一个数据并重新排序,如果标志值小于临界值,则保留第一个数据继续计算剩余每个数据的标志值;
步骤4,将每个数据的标志值与临界值进行比较,如果标志值大于临界值,则剔除该数据并重新排序,如果标志值小于临界值,则保留该数据。
二、潮位预报包括如下步骤:
(2.1)待观测的数据积累到一定的时间周期开始潮位预报(本实施例中观测25天的潮位数据进行预报),首先将已获取的逐时潮位序列分解为不同分潮的叠加,分析计算各个分潮的调和常数,然后使用计算得到的调和常数来计算未来时间的各个分潮的潮位并进行叠加,从而实现对未来潮位的预报;
具体包括如下步骤:
首先,对观测的逐时潮位进行分解,分解公式如下:
其中,
其中,
通过最小二乘法求得傅里叶系数
通过傅里叶系数求得调和常数,计算公式如下:
将调和常数代入潮位分解公式(4),公式内只有时刻
当浮标的观测潮位资料的数据长度
若浮标的观测潮位资料的数据长度
若浮标观测潮位资料的数据长度
(2.2)使用最近第二天(第26天)的实测潮位(如图10所示)对预报潮位(如图9所示)进行质量评估,若预报潮位不符合要求,则增加观测的数据进行新的调和常数的计算,然后使用新的调和常数来进行潮位预报。从图9和图10可以看出,预报潮位和与预报同期的观测潮位数据序列的差值的标准差为0.022m,表明预报结果可用。
潮位的预报结果与实测潮位的观测质量以及实测潮位资料长度有关。恶劣的海洋环境会严重降低观测数据的精准度,这种数据参与预报计算会降低预报质量。实测潮位资料越长,越能包含所在海域的潮位信息,越有利于提高潮位预报质量。
随着浮标工作时间的增加,浮标观测资料的增多,为了获得更好的预报质量,浮标将新的观测资料用于调和常数计算。
具体方法如下:
使用调和常数计算完成后的24个逐时实测潮位和对应时刻的逐时预报潮位之间的差值的均方差来评价潮位预报的质量,计算公式为:
其中,
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种基于浮标的潮位观测及预报方法
- 一种基于水动力数值模拟的感潮河网潮位预报方法