一种智能清洁装置
文献发布时间:2023-06-19 12:25:57
技术领域
本发明属于地面清洁技术领域,具体涉及一种智能清洁装置。
背景技术
随着社会科技的发展,各种智能化中大型商场、医院、广场等公共场所逐渐得到发展,然而其地面的清扫以及人们日常生活产生垃圾的处理,大多采用传统人工清扫,劳动量较大。目前市面上的几款人工驾驶清扫机,也存在噪音较大,清扫效果较差,转动不灵活,笨重,智能化水平较低等问题。
因此,需要一种智能清洁装置。
发明内容
本发明的目的在于提供一种智能清洁装置。
本发明解决其技术问题所采用的技术方案是:一种智能清洁装置,包括主体架、仿生清扫运输机构、吸拖清扫机构、套袋封装压缩机构和追光发电机构,所述仿生清扫运输机构设有毛刷,毛刷通过曲柄推杆与步进电机连接,步进电机连接有导轨,导轨位于毛刷的顶部,毛刷的侧面安装有聚拢板;
吸拖清扫机构设有拖头和拖头安装位,拖头的顶部设有拖头固定杆,拖头固定杆安装有第一减速电机,用以带动拖头的整体升降,拖头固定杆通过连接件安装有与拖头连接的第二减速电机,用以交换和拧干拖头内水,拖头安装位的两侧设有限位槽,拖头安装位的顶部设有上升限位杆,用以限制拖头的位置;
套袋封装压缩机构设有移动平台底盘,移动平台底盘安装有热封刀底座,热封刀底座的顶部安装有刀架,热封刀底座的侧面安装有推进杆,用以推进刀架上的热封刀运动;
追光发电机构设有太阳能板,太阳能板的底部安装有传动齿轮,传动齿轮一与传动电机连接,用以调整太阳能板的方向。
具体的是,所述主体架的顶部安装传送带滚轴,传动带滚轴安装有传送带一,传送带一的底部安装有垃圾收集斗,以使仿生清扫运输机构收集的垃圾装入垃圾收集斗内,并通过传动带一运输至主体架的顶部,主体架的顶部设有垃圾收入口和垃圾收集暂存机构,垃圾收集暂存机构设有垃圾箱体,垃圾箱体的底部设有垃圾袋支架,垃圾箱体的顶部设有垃圾箱体门,垃圾箱体的侧面设有传动齿轮二和传动齿轮条,用以推开垃圾箱体门。
具体的是,所述套袋封装压缩机构的底部设有传送带二,用以将封装的垃圾袋运输至地面。
具体的是,所述套袋封装压缩机构位于垃圾收集暂存机构的底部。
具体的是,所述主体架的底部安装有平衡轮和驱动轮,用以移动主体架。
本发明具有以下有益效果:该智能清洁装置可对地面进行垃圾收集清扫、吸拖消杀、垃圾箱体装满,自动套袋封装压缩投放到指定位置,自动化、智能化水平较高,可以更好的解放人的双手,减少劳动量。
附图说明
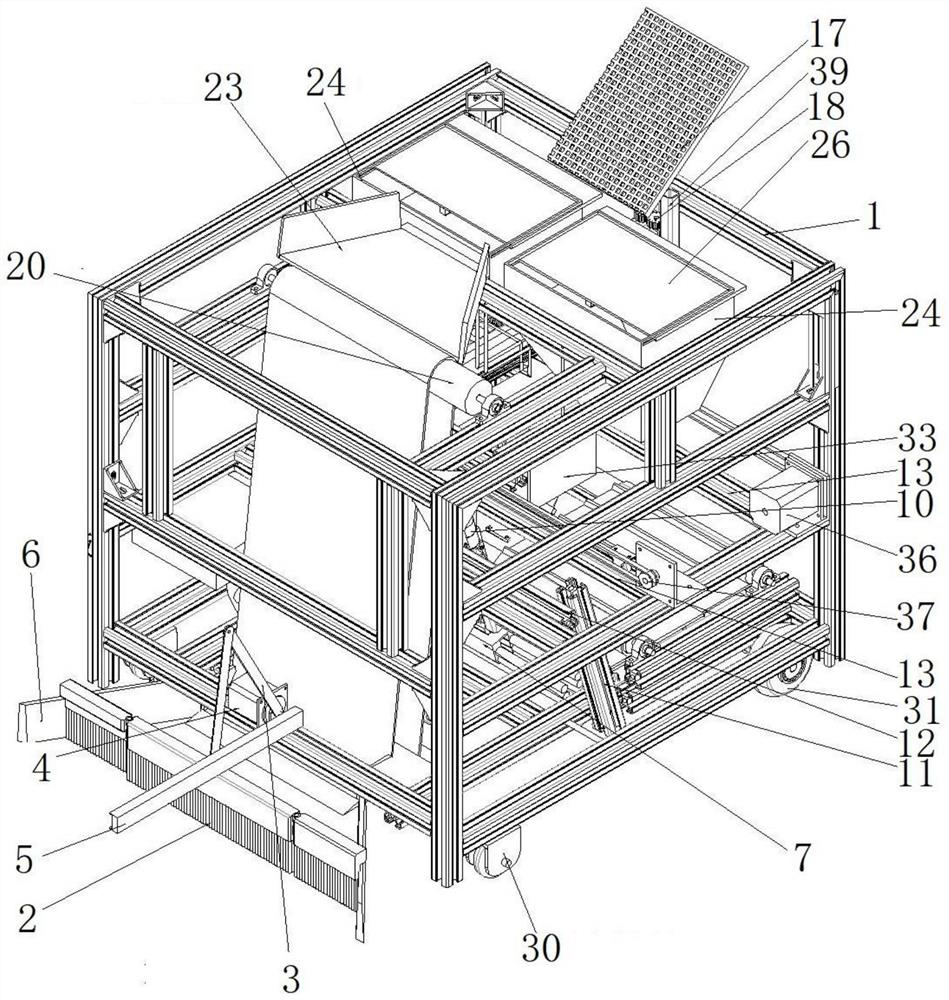
图1为本发明的整体结构示意图。
图2为垃圾收集暂存机构示意图。
图3为仿生清扫运输机构示意图。
图4为吸拖清扫机构示意图。
图5为套袋封装压缩机构示意图。
图6为追光发电机构示意图。
图中:1-主体架;2-毛刷;3-曲柄推杆;4-步进电机;5-导轨;6-聚拢板;7-拖头;8-拖头固定杆;9-第一减速电机;10-第二减速电机;11-限位槽;12-限位杆;13-移动平台底盘;14-热封刀底座;15-刀架;16-推进杆;17-太阳能板;18-传动齿轮一;19-传动电机;20-传送带滚轴;21-传送带一,22-垃圾收集斗;23-垃圾收入口;24-垃圾箱体;25-垃圾袋支架;26-垃圾箱体门;27-传动齿轮二;28-传动齿轮条;29-传送带二;30-平衡轮;31-驱动轮,32-水槽;33-热封刀底座支架;34-限位弹簧;35-推杆电机;36-电机;37-同步轮;38-压缩板;39-太阳能板支架;40-传动电机底座。
具体实施方式
现在结合附图对本发明作进一步详细的说明。
如图1-6,一种智能清洁装置,包括主体架1,所述主体架1采用轻质铝合金结构,通过铰接件连接固定,主体架1分为上中下三层,上层安装有垃圾暂存收集机构,垃圾暂存收集机构采用直通式的垃圾箱体24,镶嵌垃圾箱体门26,通过传动齿轮二27和传动齿轮条28的啮合推开垃圾箱体门26,完成垃圾投放。
仿生清扫运输机构位于主体架1的下层,仿生清扫运输机构设有毛刷2,毛刷2通过曲柄推杆3与步进电机4连接,步进电机4连接有导轨5,导轨5位于毛刷2的顶部,毛刷2的侧面安装有聚拢板6,步进电机4带动曲柄推杆3进行运动,将垃圾扫入垃圾收集斗22内,通过传送带一21传到主体架1顶部的垃圾收入口23内,毛刷2归位过程由导轨5控制其升起,防止将垃圾推出。
吸拖清扫机构由拖头7,拖头7的顶部设有拖头固定杆8,拖头固定杆8安装有第一减速电机9,用以带动拖头7的整体升降,拖头固定杆8通过连接件安装有与拖头7连接的第二减速电机10,用以交换和拧干拖头内水,拖头安装位的两侧设有限位槽11,安装位的顶部设有上升限位杆12,用以限制拖头7的位置;第一减速电机9和第二减速电机10的配合使拖头7一直处于干净的状态,提高拖地的效果,吸拖清扫机构还设有水槽32,用以清洗拖头7。
套袋封装压缩机构设有移动平台底盘13,移动平台底盘13安装有热封刀底座14,热封刀底座14的顶部安装有刀架15,热封刀底座14的侧面安装有推进杆16,用以推进热封刀运动,其中热封刀底座14安装于热封刀底座支架33,刀架15与推进杆16之间安装有限位弹簧34,推进杆16通过推杆电机35带动推进杆16;移动平台底盘13的端部设有电机36,电机36通过同步轮37带动压缩板38朝着刀架15的方向移动,从而将垃圾袋热封,套袋封装压缩机构的底部设有传送带二29,用以将封装的垃圾袋运输至地面。
追光发电机构位于主体架1的上层,追光发电机构设有太阳能板17,太阳能板17的底部安装有传动齿轮一18,传动齿轮一18与传动电机19连接,用以调整太阳能板17的方向,太阳能板17的正反面安装有光敏传感器,正反面的光敏传感器识别两侧光感,进而控制电路电流的通断,实现传动电机19的运转并传动给传动齿轮一18,使太阳能板17时刻正对太阳,保证最大的发电效率。
该清洁装置的操作由单片机物联网模块与手机互联技术,实现手机远程控制,语音交互可实现人说出垃圾的名字进行自动对比设定库,智能打开相应垃圾箱体24,智能化程度更高。整体的工作状态可由手机端实时显示,操作简单方便快捷。
本发明不局限于上述实施方式,任何人应得知在本发明的启示下作出的结构变化,凡是与本发明具有相同或相近的技术方案,均落入本发明的保护范围之内。
本发明未详细描述的技术、形状、构造部分均为公知技术。
- 智能清洁装置控制方法、装置与智能清洁装置
- 拖布、拖布机构、智能清洁装置以及手持式清洁装置