车辆管理装置、车辆管理方法、车辆管理程序
文献发布时间:2023-06-19 19:27:02
相关申请的交叉引用
本申请以2020年8月6日在日本申请的日本专利申请第2020-133994号、以及2021年5月27日在日本申请的日本专利申请第2021-89555号为基础,将基础申请的内容整体上通过参照引用至本申请。
技术领域
本公开涉及车辆管理装置、车辆管理方法、以及车辆管理程序。
背景技术
以往,在专利文献1中,提出了在车辆中抑制相对于目标轨道的跟随性的降低的车辆运动控制技术。
另一方面,在专利文献2中,提出了用于更换车辆的轮轴部件的管理系统。
专利文献1:日本特开2018-131042号公报
专利文献2:日本特开2001-34405号公报
在如专利文献1那样基于实际行驶位置使自动驾驶模式的车辆进行目标跟随的技术中,在车辆的行驶方向变化的弯道行驶时或者左右转弯时,存在产生问题的担忧。对该问题而言,例如在获取目标轨道和实际轨道的差的时间、估计实际行驶位置的时间、重新调整修正轨道的时间、或者使车辆跟随修正轨道的时间等跟随控制的时间中,存在车辆行驶于脱离目标轨道的实际轨道上的担忧。另外,在这样的跟随控制的时间中,存在由于引起实际轨道的骤变或者振荡,而乘坐者的乘坐舒适性恶化的担忧。
此处,例如,在需要避免与车辆、行人的碰撞的行驶环境、或者对交通流的制约较大的行驶环境等中,特别是目标跟随性的提高成为重要的课题。此外,例如,在存在一边预测车辆的运动方向一边行动的交通参与者的行驶环境等中,也存在起因于目标跟随性的降低的实际轨道的骤变或者振荡导致交通参与者对车辆运动预测的误解的担忧。
作为这样的状况下的深入研究的结果,发明人发现,在自动驾驶模式的车辆中,难以通过乘坐者的五感来掌握驱动、制动、以及转向操纵,因此当在这三个功能的构成部件中例如产生老化劣化等特性变化时,成为目标跟随性降低的因素。
因此,在按照专利文献2来更换部件的情况下,由于在自动驾驶模式的车辆中不能够以乘坐者的五感掌握为起点追查原因,因此乘坐者自身难以指定适合于特性变化的消除的更换部件。特别是,由于与驱动、制动、以及转向操纵相关的部件涉及多个方面,因此与特性变化的不同相对应的更换部件的组合数变得庞大,乘坐者的指定极其困难。并且,在基于乘坐者的五感而对更换后的运动变化的调整机会被限制的自动驾驶模式的车辆中,对更换部件的适合度的请求变得严格。
进一步地,在自动驾驶模式的车辆中,不仅关于通过更换与驱动、制动、以及转向操纵相关的部件来进行的更新,关于通过对用于控制驾驶来控制驱动状态、制动状态、以及转向操纵状态的控制参数进行设定变更来进行的更新也相同地,对更新后的适合度的请求变得严格。
发明内容
根据以上内容,本公开的课题在于,提供为了确保目标跟随性而适当地管理车辆的状态的车辆管理装置。本公开的另一课题在于,提供为了确保目标跟随性而适当地管理车辆的状态的车辆管理方法。本公开的又一课题在于,为了确保目标跟随性而适当地管理车辆的状态的车辆管理程序。
以下,对用于解决课题的本公开的技术手段进行说明。
本公开的第一方式是管理搭载施加加速的驱动系统、施加减速的制动系统、以及施加转向的转向操纵系统作为基本功能系统的车辆的状态的车辆管理装置,具备:
异常判断部,在车辆的行驶场景中的自动驾驶模式下的行驶方向变化的管理对象场景下,判断被预测为与基本功能系统的特性变化相关的行驶异常的有无;以及
指定输出部,从构成基本功能系统的多个部件中,指定输出根据所判断的行驶异常而请求更换的更换请求部件。
本公开的第二方式是管理搭载施加加速的驱动系统、施加减速的制动系统、以及施加转向的转向操纵系统作为基本功能系统的车辆的状态的车辆管理方法,包含:
在车辆的行驶场景中的自动驾驶模式下的行驶方向变化的管理对象场景下,判断被预测为与基本功能系统的特性变化相关的行驶异常的有无的异常判断工序;以及
从构成基本功能系统的多个部件中,指定输出根据所判断的行驶异常而请求更换的更换请求部件的指定输出工序。
本公开的第三方式是包含为了管理搭载施加加速的驱动系统、施加减速的制动系统、以及施加转向的转向操纵系统作为基本功能系统的车辆的状态而使处理器执行的命令的车辆管理程序,
命令包含:
在车辆的行驶场景中的自动驾驶模式下的行驶方向变化的管理对象场景下,判断被预测为与基本功能系统的特性变化相关的行驶异常的有无的异常判断工序;以及
从构成基本功能系统的多个部件中,指定输出根据所判断的行驶异常而请求更换的更换请求部件的指定输出工序。
根据这些第一~第三方式,在车辆的行驶场景中的自动驾驶模式下的行驶方向变化的管理对象场景下,判断被预测为与作为驱动系统、制动系统、以及转向操纵系统的基本功能系统的特性变化相关的行驶异常的有无。因此,在第一~第三方式中,从构成基本功能系统的多个部件中,将根据所判断的行驶异常而请求更换的更换请求部件指定输出。由此,即使伴随着需要目标跟随性的自动驾驶模式下的车辆的行驶方向变化而产生与左右目标跟随性的基本功能系统的特性变化相关的行驶异常,也能够通过指定输出来通知消除该行驶异常的更换请求部件。因此,能够为了确保目标跟随性而适当地管理车辆的状态。
本公开的第四方式是具有处理器,管理搭载施加加速的驱动系统、施加减速的制动系统、以及施加转向的转向操纵系统作为基本功能系统的车辆的状态的车辆管理装置,
处理器构成为执行:
判断在车辆的自动驾驶模式下被预测为与基本功能系统的特性变化相关的行驶变动的有无;以及
通过与所判断的行驶变动匹配的基本功能系统的更新来对车辆施加用于缓和该行驶变动的缓和处理。
本公开的第五方式是为了管理搭载施加加速的驱动系统、施加减速的制动系统、以及施加转向的转向操纵系统作为基本功能系统的车辆的状态而由处理器执行的车辆管理方法,包含:
判断在车辆的自动驾驶模式下被预测为与基本功能系统的特性变化相关的行驶变动的有无;以及
通过与所判断的行驶变动匹配的基本功能系统的更新来对车辆施加用于缓和该行驶变动的缓和处理。
本公开的第六方式是包含为了管理搭载施加加速的驱动系统、施加减速的制动系统、以及施加转向的转向操纵系统作为基本功能系统的车辆的状态而存储于存储介质,且由处理器执行的命令的车辆管理程序,
命令包含:
判断在车辆的自动驾驶模式下被预测为与基本功能系统的特性变化相关的行驶变动的有无;以及
通过与所判断的行驶变动对应的基本功能系统的更新来对车辆施加用于缓和该行驶变动的缓和处理。
根据这些第四~第六方式,在车辆的自动驾驶模式下,判断被预测为与作为驱动系统、制动系统、以及转向操纵系统的基本功能系统的特性变化相关的行驶变动的有无。因此,在第四~第六方式中,通过与所判断的行驶变动匹配的基本功能系统的更新来对车辆实施用于缓和该行驶变动的缓和处理。由此,在需要目标跟随性的自动驾驶模式下,即使产生与左右目标跟随性的基本功能系统的特性变化相关的行驶变动,也能够进行缓和处理以便消除该行驶变动。因此,能够为了确保目标跟随性而适当地管理车辆的状态。
本公开的第七方式是具有处理器,管理搭载施加加速的驱动系统、施加减速的制动系统、以及施加转向的转向操纵系统作为基本功能系统的车辆的状态的车辆管理装置,
处理器构成为执行:
判断在车辆的自动驾驶模式下被预测为导致行驶变动的基本功能系统的特性变化的有无;以及
通过与所判断的特性变化对应的基本功能系统的更新来对车辆施加用于缓和行驶变动的缓和处理。
本公开的第八方式是为了管理搭载施加加速的驱动系统、施加减速的制动系统、以及施加转向的转向操纵系统作为基本功能系统的车辆的状态而由处理器执行的车辆管理方法,包含:
判断在车辆的自动驾驶模式下被预测为导致行驶变动的基本功能系统的特性变化的有无;以及
通过与所判断的特性变化对应的基本功能系统的更新来对车辆施加用于缓和行驶变动的缓和处理。
本公开的第九方式是包含为了管理搭载施加加速的驱动系统、施加减速的制动系统、以及施加转向的转向操纵系统作为基本功能系统的车辆的状态而存储于存储介质,且由处理器执行的命令的车辆管理程序,
命令包含:
判断在车辆的自动驾驶模式下被预测为导致行驶变动的基本功能系统的特性变化的有无;以及
通过与所判断的特性变化匹配的基本功能系统的更新来对车辆施加用于缓和行驶变动的缓和处理。
根据这些第七~第九方式,在车辆的自动驾驶模式下,判断作为驱动系统、制动系统、以及转向操纵系统的基本功能系统的被预测为导致行驶变动的特性变化的有无。因此,在第七~第九方式中,通过与所判断的特性变化匹配的基本功能系统的更新来对车辆施加用于缓和行驶变动的缓和处理。由此,在需要目标跟随性的自动驾驶模式下,即使产生左右目标跟随性的基本功能系统的特性变化,也能够进行缓和处理以便消除与该特性变化相关的行驶变动。因此,能够为了确保目标跟随性而适当地管理车辆的状态。
附图说明
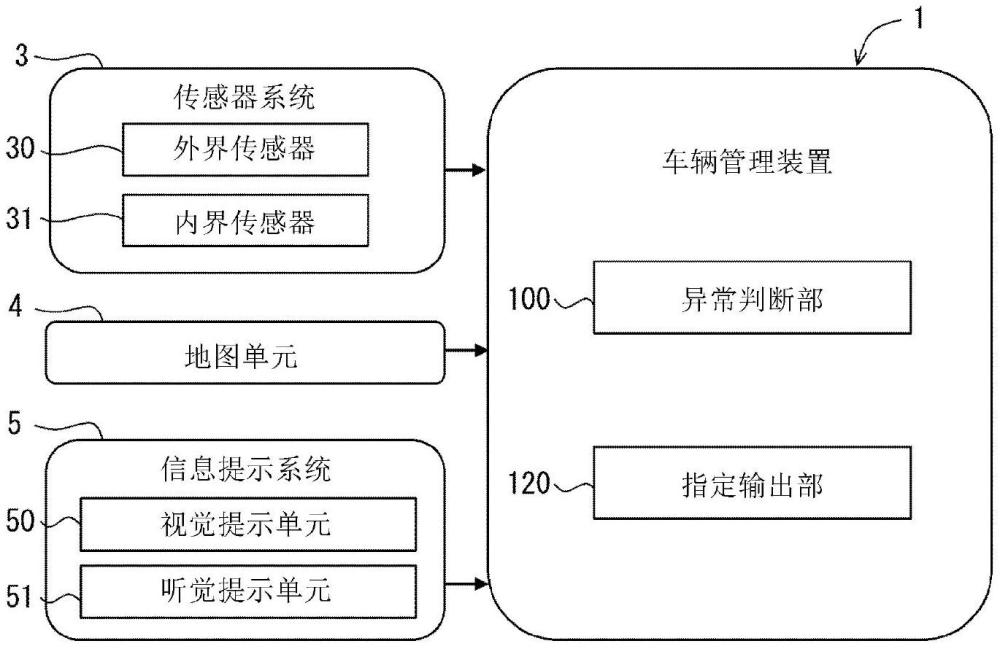
图1是表示第一实施方式的车辆管理装置的整体结构的框图。
图2是表示供第一实施方式的车辆管理装置搭载的车辆以及基本功能系统的构成部件的示意图。
图3是表示第一实施方式的车辆管理装置的功能结构的框图。
图4是表示第一实施方式的车辆管理装置的管理对象场景的示意图。
图5是表示第一实施方式的车辆管理装置的管理对象场景的示意图。
图6是表示第一实施方式的车辆管理装置的管理对象场景的示意图。
图7是表示第一实施方式的车辆管理装置的管理对象场景的示意图。
图8是用于对第一实施方式的车辆管理装置的轨道跟随异常进行说明的示意图。
图9是用于对第一实施方式的车辆管理装置的速度跟随异常进行说明的示意图。
图10是用于对第一实施方式的车辆管理装置的轨道跟随异常进行说明的示意图。
图11是用于对第一实施方式的车辆管理装置的轨道跟随异常进行说明的示意图。
图12是用于对第一实施方式的车辆管理装置的速度跟随异常进行说明的示意图。
图13是用于对第一实施方式的车辆管理装置的速度跟随异常进行说明的示意图。
图14是用于对第一实施方式的车辆管理装置的速度跟随异常进行说明的示意图。
图15是用于对第一实施方式的车辆管理装置的因素预测进行说明的流程图。
图16是用于对第一实施方式的车辆管理装置的指定输出进行说明的示意图。
图17是用于对第一实施方式的车辆管理装置的指定输出进行说明的示意图。
图18是用于对第一实施方式的车辆管理装置的指定输出进行说明的流程图。
图19是表示图18的变形例的流程图。
图20是用于对第一实施方式的车辆管理装置的指定输出进行说明的示意图。
图21是用于对第一实施方式的车辆管理装置的指定输出进行说明的示意图。
图22是表示第一实施方式的车辆管理方法的流程图。
图23是表示第二实施方式的车辆管理装置的详细结构的框图。
图24是用于对第二实施方式的车辆管理装置的学习进行说明的示意图。
图25是表示第三实施方式的车辆管理装置的功能结构的框图。
图26是表示第三实施方式的车辆管理方法的流程图。
图27是表示第四实施方式的车辆管理装置的功能结构的框图。
图28是表示第四实施方式的车辆管理方法的流程图。
图29是表示第一~第四实施方式的变形例的示意图。
具体实施方式
以下,基于附图对多个实施方式进行说明。另外,有时通过在各实施方式中对相对应的构成要素附加相同的附图标记,来省略重复的说明。另外,在各实施方式中仅对构成的一部分进行说明的情况下,该构成的其它的部分能够应用先前说明的其它的实施方式的构成。并且,不仅是在各实施方式的说明中明示的构成的组合,若组合并不特别产生妨碍,则即使未明示,也能够部分地组合多个实施方式的构成彼此。
(第一实施方式)
图1所示的第一实施方式的车辆管理装置1管理车辆2的状态。车辆2例如为乘用车、工业车、应急车辆、或者微型移动装置等。车辆2能够在基于自主驾驶控制或者高度驾驶辅助控制的自动驾驶模式下稳定或暂时地自动行驶。特别是,在基于自主驾驶控制的车辆2的自动驾驶模式下,在实现系统在限定区域中执行全部的动态驾驶任务等的带条件自动驾驶等级中定义的等级3、或3以上的等级的情况下,车辆管理装置1是优选的。
如图2所示,在车辆2搭载驱动系统7、制动系统8、以及转向操纵系统9作为基本功能系统6。驱动系统7由用于对车辆2施加加速的部件构成。构成驱动系统7的部件例如为轮胎60、电池61、加速踏板70、驱动用马达71、驱动用发动机、启动开关、变速器、以及换挡单元等中的多个种类。制动系统8由用于对车辆2施加减速的部件。构成制动系统8的部件例如为轮胎60、电池61、制动踏板80、摩擦制动单元81、油压电路、以及再生用马达等中的多个种类。此处,所谓摩擦制动单元81,包含制动蹄和制动鼓中的至少一方。转向操纵系统9由用于对车辆2施加转向的部件构成。构成转向操纵系统9的部件例如为轮胎60、电池61、方向盘90、转向单元、以及动力转向用马达等中的多个种类。
在以上内容中,构成基本功能系统6的各系统7~9的部件例如也可以如上述的轮胎60以及电池61那样在至少二个系统之间共用化。此处,电池61例如包含铅蓄电池、或者锂离子电池等。另外,构成基本功能系统6的各系统7~9的部件例如也可以被细分化至螺栓、螺母、螺钉、或者电气布线等的级别。
如图1、3所示的那样,在车辆2搭载传感器系统3。传感器系统3获取在车辆2中用于自动驾驶模式等的驾驶控制的各种信息。传感器系统3构成为包含外界传感器30和内界传感器31。
外界传感器30生成作为车辆2的周边环境的外界的信息。外界传感器30也可以通过检测存在于车辆2的外界的物体,来生成外界信息。这样的物体检测型的外界传感器30例如为照相机、LiDAR(Light Detection and Ranging/Laser Imaging Detection andRanging:光探测和测距/激光成像探测和测距)、雷达、以及声呐等中的至少一个种类。外界传感器30也可以通过从存在于车辆2的外界的GNSS(Global Navigation SatelliteSystem:全球导航卫星系统)的人工卫星或者ITS(Intelligent Transport Systems:智能交通系统)的路侧设备接收信号,来生成外界信息。这样的信号接收型的外界传感器30例如为GNSS接收机、以及远程信息处理接收机等中的至少一个种类。
内界传感器31生成作为车辆2的内部环境的内界的信息。内界传感器31也可以通过在车辆2的内界检测特定的运动物理量,来生成内界信息。这样的物理量检测型的内界传感器31例如为行驶速度传感器、加速度传感器、多普勒速度传感器、伯努利流体速度传感器、陀螺仪传感器、轮胎监视器、以及制动监视器等中的至少一个种类。内界传感器31也可以通过在车辆2的内界检测与乘坐者有关的特定状态,来生成内界信息。这样的乘坐者状态检测型的内界传感器31例如为驾驶员状态监视器,致动器传感器、以及车内机器传感器等中的至少一个种类。
此处,驾驶员状态监视器例如检测脸部的方向、困倦、以及姿势等中的至少一个种类作为驾驶车辆2的乘坐者的状态。致动器传感器例如检测踏板70、80的操作位置、方向盘90的转向操纵角、启动开关的接通断开状态、以及换挡杆的换挡位置等中的至少一个种类,作为在车辆2中与基本功能系统6的行驶致动器有关的乘坐者的指示状态。车内机器传感器例如检测接通断开开关的操作状态、触摸面板的操作状态、以及可非接触识别的手势操作等中的至少一个种类,作为与车内机器有关的乘坐者的操作状态。
在车辆2搭载地图单元4。地图单元4非暂时地存储在车辆2中用于包含自动驾驶模式的驾驶控制的地图信息。地图单元4例如构成为包含半导体存储器、磁介质、以及光学介质等中的至少一个种类的非过渡性实体存储介质(non-transitory tangible storagemedium)。地图单元4也可以是估计包含自身位置的车辆2的状态量的定位器的数据库。地图单元4也可以是对车辆2的行驶路径进行导航的导航单元的数据库。地图单元4也可以由这些数据库等中的多个种类的组合构成。
地图单元4例如通过与车辆2的外部的无线通信等,来获取并存储最新的地图信息。此处,地图信息作为表示车辆2的行驶环境的信息被二维或者三维地数据化。地图信息例如也可以包含表示道路本身的位置、形状、以及路面状态等中的至少一个种类的道路信息。地图信息例如也可以表示附属于道路的标志以及划分线的位置以及形状等中的至少一个种类的标识信息。地图信息例如也可以包含表示面向道路的建造物以及信号灯的位置以及形状等中的至少一个种类的构造物信息。
在车辆2搭载信息提示系统5。信息提示系统5朝向车辆2的乘坐者提示各种信息。信息提示系统5构成为包含视觉提示单元50和听觉提示单元51。
视觉提示单元50通过刺激乘坐者的视觉来传递提示对象信息。视觉提示单元50例如为HUD(Head-up Display:平视显示器)、MFD(Multi Function Display:多功能显示器)、组合仪表、以及导航单元等中的至少一个种类。听觉提示单元51通过刺激乘坐者的听觉来传递提示对象信息。听觉提示单元51例如为扬声器,蜂鸣器、以及振动单元等中的至少一个种类。
信息提示系统5也可以与向车辆2搭载的搭载单元50、51分开地,例如通过利用无线通信等而设置于车辆2的外部。这种情况下的信息提示系统5的设置场所例如为维修工厂、经销商、以及远程辅助中心等中的至少一场所。此外,作为信息提示系统5,也可以添加与向车辆2的搭载单元50、51分开而乘坐者所具有的能进行视觉提示以及听觉提示的移动终端。
图1所示的车辆管理装置1例如经由LAN(Local Area Network:局域网)、线束、以及内部总线等中的至少一个种类连接于传感器系统3、地图单元4、以及信息提示系统5。车辆管理装置1构成为包含至少一个专用计算机。构成车辆管理装置1的专用计算机也可以是在车辆2中实现包含自动驾驶模式的驾驶控制的驾驶控制ECU(Electronic Control Unit:电子控制单元)。构成车辆管理装置1的专用计算机也可以是分别独立地控制车辆2中的基本功能系统6的行驶致动器的致动器ECU。构成车辆管理装置1的专用计算机也可以是估计包含自身位置的车辆2的状态量的定位器ECU。构成车辆管理装置1的专用计算机也可以是对车辆2的行驶路径进行导航的导航ECU。构成车辆管理装置1的专用计算机也可以是控制信息提示系统5的信息提示的HCU(HMI(Human Machine Interface:人机接口)ControlUnit:HMI控制单元)。
构成车辆管理装置1的专用计算机至少各具有一个存储器10以及处理器12。存储器10是非暂时地存储计算机可读取的程序以及数据等的例如半导体存储器、磁介质、以及光学介质等中的至少一个种类的非过渡性实体存储介质(non-transitory tangiblestorage medium)。处理器12例如包含CPU(Central Processing Unit:中央处理器)、GPU(Graphics Processing Unit:图形处理单元)、以及RISC(Reduced Instruction SetComputer:精减指令集计算机)-CPU等中的至少一个种类作为核心。
处理器12执行存储于存储器10的车辆程序中包含的多个命令。由此,车辆管理装置1构建多个用于管理车辆2的状态的功能部(即,功能模块)。这样,在车辆管理装置1中,通过为了管理车辆2的状态而存储于存储器10的车辆管理程序使处理器12执行多个命令,来构建多个功能部。在由车辆管理装置1构建的多个功能部中,如图3所示,包含异常判断部100和指定输出部120。
异常判断部100判断在车辆2的行驶场景中的如图4~7所示的那样的管理对象场景M下预测的行驶异常的有无。此处,管理对象场景M例如被定义为自动驾驶模式下的行驶方向根据行驶路的曲率形状或者通过交叉路口等而变化的弯曲行驶场所的行驶场景。具体而言,如图4~6所示,管理对象场景M包含变化后的行驶方向相对于变化前的行驶方向倾斜45度以上的行驶场景。另外,特别地,如图7所示,管理对象场景M包含变化后的行驶方向上的车道数为多个的行驶场景。
异常判断部100判断的所谓行驶异常,意味着被预测为在管理对象场景M下与在基本功能系统6的各系统7~9中引起的特性变化相关的异常。另外,与这样的行驶异常相关的所谓特性变化,意味着构成各系统7~9的部件的特性(即,性能)例如起因于老化劣化等而从初始特性变动。从这些意义出发,行驶异常针对设想的管理对象场景M下的各系统7~9的每个特性变化、或者这些特性变化中的两个系统的每个组合,例如包含可得到根据对大数据等过去数据进行解析的结果而产生的预先预测的异常的候补。因此,如图8、9所示的那样,异常判断部100将跟随异常Rt、Rv中的至少一方作为行驶异常,判断其有无。
如图8所示,轨道跟随异常Rt是与车辆2的目标轨道Tt和实际行驶位置Pr有关的差Δ脱离至允许范围外的目标跟随性的异常。因此,判断轨道跟随异常Rt的异常判断部100通过基于在自动驾驶模式下控制车辆2的驾驶的行驶参数的目标值亦即目标参数,来获取目标轨道Tt。另外,判断轨道跟随异常Rt的异常判断部100通过基于来自物体检测型以及信号接收型中的至少一方的外界传感器30的获取信息、或者这样的获取信息与地图单元4的地图信息的匹配(例如包含自身位置估计的结果等),来获取实际行驶位置Pr。
异常判断部100根据这样获取的目标轨道Tt以及实际行驶位置Pr,来执行轨道跟随异常Rt的判断。此时,异常判断部100也可以将对该设定区间内的多个实际行驶位置Pr进行内插而形成的实际轨道Tr相对于设定区间内的目标轨道Tt的差Δ的总和或者平均值用于轨道跟随异常Rt的判断,来提高判断精度。或者,异常判断部100也可以将该实际行驶位置Pr相对于在目标轨道Tt上与实际行驶位置Pr对应的代表点的差Δ用于轨道跟随异常Rt的判断,来节约判断运算资源。
针对轨道跟随异常Rt的差Δ的允许范围被定义为阈值以下或者不足阈值的范围。在该定义下,异常判断部100通过差Δ脱离至允许范围外、即超过阈值或者为阈值以上,来作出存在轨道跟随异常Rt的临时判断。此时,如图10所示,也可以若针对每个控制定时,差Δ为允许范围外,则异常判断部100作出临时判断。或者,如图11所示,也可以在多个控制定时连续地或者平均地差Δ为允许范围外,则异常判断部100作出临时判断。
另一方面,如图9所示,速度跟随异常Rv是与车辆2的目标速度Vt和实际行驶速度Vr有关的差δ脱离至允许范围外的与轨道跟随异常Rt不同的目标跟随性异常。因此,判断速度跟随异常Rv的异常判断部100通过基于在自动驾驶模式下控制车辆2的驾驶的目标参数,来获取目标速度Vt。另外,判断速度跟随异常Rv的异常判断部100通过基于来自物理量检测型的内界传感器31的获取信息,来获取实际行驶速度Vr。
异常判断部100根据这样获取的目标速度Vt以及实际行驶速度Vr来执行速度跟随异常Rv的判断。此时,异常判断部100也可以通过将一个时间序列点上的目标速度Vt和实际行驶速度Vr的差δ用于轨道跟随异常Rt的判断,来节约判断运算资源。或者,异常判断部100也可以将针对设定区间内的多个时间序列点的目标速度Vt和实际行驶速度Vr分别进行总和或者平均后的值彼此的差δ用于速度跟随异常Rv的判断,来提高判断精度。
针对速度跟随异常Rv的差δ的允许范围被定义为阈值以下或者不足阈值的范围。在该定义下,异常判断部100通过差δ脱离至允许范围外、即超过阈值或者为阈值以上,来作出存在速度跟随异常Rv的临时判断。此时,如图12所示,也可以若针对每个控制定时,差δ为允许范围外,则异常判断部100作出临时判断。或者,如图13所示,也可以在多个控制定时连续地或者平均地差δ为允许范围外,则异常判断部100作出临时判断。
此处,决定针对速度跟随异常Rv的差δ的允许范围的阈值也可以设定为与目标速度Vt和实际行驶速度Vr的大小关系对应的值。例如,如图14所示,也可以通过用于判断Vr-Vt>0的情况的阈值设定得与用于判断Vr-Vt<0的情况的阈值相比较小,来抑制因基本功能系统6的特性变化而实际行驶速度Vr与目标速度Vt相比过大。
在这样的用于判断跟随异常Rt、Rv的差Δ、δ中的作为作出了临时判断的至少一方的关注差(参照图10~14)脱离至允许范围外的情况下,异常判断部100预测该行驶异常是否与特性变化以外的其他因素相关。其结果是,在与其他因素相关的预测不成立的情况下,异常判断部100确定存在行驶异常的临时判断。另一方面,在不是基本功能系统6的特性变化,而与其他因素相关的预测成立的情况下,异常判断部100放弃临时判断。
此处,所谓其他因素,包含图15的流程所示的多个因素A~E中的至少一个种类。具体而言,因素A是车辆2行驶的距离或者时间的经过因素。因此,例如在针对每个更换请求部件X从使用开始起行驶距离或行驶时间为判断基准值以下或者不足判断基准值的情况等下,在S1中判断为与因素A的相关预测成立,由此在S2中放弃异常判断部100中的临时判断。
因素B是车辆2中的暂时性的干扰因素。因此,例如在起因于天候或者路面状况而同一行驶场所下的关注差非稳定地为允许范围外的情况等下,在S3判断为与因素B的相关预测成立,由此在S2中放弃异常判断部100中的临时判断。
因素C是车辆2所行驶的行驶路的构造因素。因此,例如在由于行驶路的曲率超过判断基准值或者为判断基准值以上,从而容易产生允许范围外的关注差的构造的情况等下,在S4判断为与因素C的相关预测成立,由此在S2中放弃异常判断部100中的临时判断。
因素D是车辆2中的目标参数的生成因素。因此,例如在从与目标轨道Tt有关的目标参数的生成至进入到管理对象场景M下的弯曲行驶场所所需的时间例如因障碍物的存在或者目的地的迷失等而超过判断基准值或者为判断基准值以上的情况等下,在S5判断为与因素D的相关预测成立,由此在S2中放弃异常判断部100中的临时判断。
因素E是搭载于车辆2的传感器系统3的状态因素。因此,例如在基于来自传感器系统3的一个传感器的获取信息的状态估计、与基于来自该系统3的其他传感器的获取信息的状态估计的偏差超过判断基准值或者为判断基准以上的情况等下,在S6判断为与因素E的相关预测成立,由此在S2中放弃异常判断部100中的临时判断。此处,所谓状态估计,例如可以使用卡尔曼滤波器等,对车辆2的位置或者速度地执行。
另外,在基于这样的因素A~E的临时判断的放弃时,例如也可以一并执行传感器系统3的校准或者更换、车辆2中的驾驶控制用程序的升级或者与开发者的联络、传感器系统3中的检测逻辑的更新、以及目标轨道Tt的再生成等中的至少一个种类。
图3所示的指定输出部120从构成基本功能系统6的各系统7~9的多个部件中,根据由异常判断部100确定了存在判断的行驶异常,将图16所示那样的请求更换的更换请求部件X指定输出。换言之,在由异常判断部100放弃了存在判断的情况下,指定输出部120推迟更换请求部件X的指定输出(参照上述的图15的例子中的S2)。
此处,通过为了使判断为存在的行驶异常恢复正常而需要更换的一个部件或者多个部件的组合,来指定更换请求部件X。具体而言,在行驶异常为轨道跟随异常Rt的情况下,例如,如图17所示的那样,所谓在转弯中,车辆2的后部在实际轨道Tr中与目标轨道Tt相比向转弯方向外侧运动。在这种情况下,例如,如图16所示,构成制动系统8的摩擦制动单元81的制动蹄和制动鼓的组合被指定为更换请求部件X。
另一方面,在行驶异常为速度跟随异常Rv的情况下,例如,如图18的流程所示,基于车辆2的减速状况以及基本功能系统6的劣化估计,制动系统8的构成部件被指定为更换请求部件X。具体而言,在图18的例子中,当在S11中在自然行驶时的控制定时确认了由Vt<Vr导致的允许范围外的差δ(即,难以减速的状态)时,在S12中通过作为内界传感器31的轮胎监视器判定轮胎60的磨损劣化。其结果是,当确认了轮胎60的磨损劣化时,在S13中该轮胎60被指定为更换请求部件X。另外,如图19所示,S12的判定也可以不执行。另外,虽然未图示,但也可以省略S11~S13的组。
进一步地,在图18的例子中,当在S14中在加速时的控制定时确认了由Vr<Vt导致的允许范围外的差δ(即,难以加速的状态)时,在S15中电池61被指定为更换请求部件X。另外,进一步地,在图18的例子中,当在S16中制动时的控制定时确认了由Vt<Vr导致的允许范围外的差Δ(即,难以制动的状态)时,在S17中通过作为内界传感器31的制动监视器判定摩擦制动单元81中的制动蹄的磨损劣化。其结果是,当确认了制动蹄的磨损劣化时,在S18中该制动蹄被指定为更换请求部件X。另外,如图19所示,S17的判定也可以不执行。另外,虽然未图示,但也可以省略S14、S15的组和S16~S18的组中的至少一方的组。进一步地,虽然未图示,但也可以在再生制动时的控制定时确认了由Vt<Vr导致的允许范围外的差Δ(即,难以减速的状态)的情况下,电池61也被指定为更换请求部件X。
指定输出部120在生成与这样指定的更换请求部件X相关的更换信息I后输出。此处,例如,如图20、21所示,更换信息I为更换请求部件X的部件名、部件编号、更换指示、更换顺序,已训练的更换委托目的地、注意事项、车型信息、以及购入或者更换的履历等中的至少一个种类。
如图20所示,指定输出部120通过至少成为信息提示系统5的信息提示方式中的视觉提示的显示,来输出更换信息I。此处,更换信息I例如通过文字、标记、动画、以及二维码等中的至少一个种类来显示。作为显示这样的更换信息I的信息提示系统5,搭载于车辆2的视觉提示单元50是必需的,但也可以除此以外,如上述那样使用车辆2外的设置单元和乘坐者的移动终端中的至少一方。
另外,例如,如图21的(a)、(b)所示,更换信息I中的部件编号以及二维码也可以张贴于更换请求部件X或者其外壳Y等。由此,能够抑制误更换。
根据图22,以下对车辆管理装置1通过至此说明的功能部100、120的共同作用来管理车辆2的状态的车辆管理方法的流程进行说明。另外,本流程中的各“S”分别意味着通过车辆管理程序中包含的多个命令来执行的多个步骤。
在S101中,异常判断部100判断在车辆2的行驶场景中的管理对象场景M下预测为与基本功能系统6的特性劣化相关的行驶异常的有无。其结果是,在作为与跟随异常Rt、Rv相关的差Δ、δ中的至少一方的行驶异常的关注差脱离至允许范围外的情况下,由异常判断部100作出存在存在行驶异常的临时判断,由此本流程移至S102。
在S102中,异常判断部100预测临时判断的行驶异常是否与特性变化以外的其他因素相关。其结果是,在行驶异常与其他因素相关的的预测不成立的情况下,由异常判断部100确定存在行驶异常的临时判断,由此本流程移至S103。
在S103中,指定输出部120从构成基本功能系统6的多个部件中,将根据由异常判断部100确定了行驶异常的存在判断的行驶异常而请求更换的更换请求部件X指定输出。
在S102中行驶异常与其他因素相关的的预测成立的情况下,由异常判断部100放弃存在行驶异常的临时判断,由此本流程移至S104。在S104中,指定输出部120推迟更换请求部件X的指定输出。
在S104的执行后、和在S101中作出了不存在行驶异常的判断的情况下,本流程的本次执行结束。这样,在本流程中,S101、S102相当于异常判断工序,S103、S104相当于指定输出工序。
(作用效果)
以下,对以上说明的第一实施方式的作用效果进行说明。
根据第一实施方式,在车辆2的行驶场景中的自动驾驶模式下的行驶方向变化的管理对象场景M下,判断被预测为与作为驱动系统7、制动系统8、以及转向操纵系统9的基本功能系统6的特性变化相关的行驶异常的有无。因此,在第一实施方式中,从构成基本功能系统6的多个部件中,将根据判断的行驶异常而请求更换的更换请求部件X指定输出。由此,即使伴随着需要目标跟随性的自动驾驶模式下的车辆2的行驶方向变化,产生与左右目标跟随性的基本功能系统6的特性变化相关的行驶异常,也能够通过指定输出来通知消除该行驶异常的更换请求部件X。因此,能够为了确保目标跟随性而适当地管理车辆2的状态。
根据第一实施方式,也可以将与车辆2的目标轨道Tt和实际行驶位置Pr有关的差Δ脱离至允许范围外的轨道跟随异常Rt判断为行驶异常。在该情况下,即使产生表示对目标轨道Tt的跟随性降低的轨道跟随异常Rt,也能够通过指定输出来通知适合于该跟随异常Rt的更换请求部件X。因此,能够适当地管理车辆2的状态并催促目标跟随性的确保所需要的部件X的更换。
根据第一实施方式,也可以将与车辆2的目标速度Vt和实际行驶速度Vr有关的差δ脱离至允许范围外的速度跟随异常Rv判断为行驶异常。在该情况下,即使在车辆2的行驶方向变化时因取决于对目标速度Vt的跟随性的转弯运动性的恶化而产生导致对目标轨道Tt的跟随性降低的速度跟随异常Rv,也能够通过指定输出来通知适合于该跟随异常Rv的更换请求部件X。因此,能够适当地管理车辆2的状态并催促目标跟随性的确保所需要的部件X的更换。
根据第一实施方式,在与目标轨道Tt和实际行驶位置Pr有关的差Δ以及与目标速度Vt和实际行驶速度Vr有关的差δ中的至少一方脱离至允许范围外的情况下,当预测为行驶异常与特性变化以外的其他因素相关时,推迟更换请求部件X的指定输出。此处,特别地,所谓其他因素,包含车辆2行驶的距离或者时间的经过因素A、车辆2中的暂时性的干扰因素B、车辆2所行驶的行驶路的构造因素C、车辆2中的目标参数的生成因素D、以及搭载于车辆2的传感器系统3的状态因素E中的至少一个种类。由此,能够将更换请求部件X的指定输出限定为与基本功能系统6的特性变化相关的行驶异常而使指定输出适合。因此,对于适当地管理车辆2的状态并催促目标跟随性的确保所需要的部件X的更换效果,能够确保可靠性。
根据第一实施方式,当更换请求部件X的指定输出时,生成与该部件X相关地显示的更换信息I。由此,能够通过更换信息I的显示来直接地通知更换请求部件X。因此,能够提高适当地管理车辆2的状态并催促目标跟随性的确保所需要的部件X的更换效果本身。
根据第一实施方式,管理对象场景M包含变化后的行驶方向相对于变化前的行驶方向倾斜45度以上的车辆2的行驶场景。由此,在需要目标跟随性的管理对象场景M中,特别是至少当在由制动系统8的特性变化导致的影响较大的行驶场景下产生行驶异常时,能够通过指定输出来通知适合于该行驶异常的更换请求部件X。因此,通过考虑了伴随着行驶方向变化的安全性的车辆2的状态的适当管理,能够催促目标跟随性的确保所需的部件X的更换。
根据第一实施方式,包含变化后的行驶方向上的车道数为多个的车辆2的行驶场景。由此,即使在需要目标跟随性的管理对象场景M中,特别别是在由于行驶方向变化目的地为多个车道而容易对交通参与者造成误解的行驶场景下产生行驶异常时,也能够通过指定输出来通知适合于该行驶异常的更换请求部件X。因此,通过考虑了交通参与者的车辆2的状态的适当管理,能够催促目标跟随性的确保所需的部件X的更换。
(第二实施方式)
第二实施方式是第一实施方式的变形例。
在由第二实施方式的车辆管理装置1构建的多个功能部中,除了异常判断部100和指定输出部120以外,如图23所示,包含学习部2140。学习部2140针对用于在包含管理对象场景M的任意的行驶场景下控制车辆2的驾驶的控制参数亦即目标参数,基于该驾驶的结果进行学习。此处,例如使用神经网络等机器学习模型来执行学习。这样的学习的定时通常为行驶路上的车辆2的行驶时或者停止时,但例如也可以为更换请求部件X实际更换之后的如图24所示的测试跑道Z上的车辆2的行驶时或者停止时。
(作用效果)
以下,对以上说明的第二实施方式所特有的作用效果进行说明。
根据第二实施方式,针对在管理对象场景M中控制车辆2的驾驶的目标参数,基于该驾驶的结果进行学习。由此,在与第一实施方式相同地通过指定输出来通知消除行驶异常的更换请求部件X的第二实施方式中,能够抑制在不更换目标跟随性的确保所需的部件X的状态下学习不适当的目标参数的情况。并且,在部件X实际更换后,也能够学习适合于该更换后的部件X的目标参数。
(第三实施方式)
第三实施方式是将第一实施方式和第二实施方式组合,并进一步添加了执行功能的变形例。
在车辆2中,在基本功能系统6的驱动系统7中也包含设定基于该系统7的用于控制车辆2的驾驶并可变调整驱动状态的控制参数的控制系统。相同地,在车辆2中,在基本功能系统6的制动系统8中也包含设定基于该系统8的用于控制车辆2的驾驶并可变调整制动状态的控制参数的控制系统。并且,在车辆2中,在基本功能系统6的转向操纵系统9中也包含设定基于该系统9的用于控制车辆2的驾驶并可变调整转向操纵状态的控制参数的控制系统。这些各系统7~9的控制系统也可以在至少两个系统之间共用,也可以相互独立。因此各系统7~9的控制系统也可以由驾驶控制ECU、致动器ECU、以及它们以外的ECU等中的至少一个种类构成。
如图25所示,在由第三实施方式的车辆管理装置1构建的多个功能部中包含预测判断部3100、更新处理部3120、以及学习部2140。在预测判断部3100中包含异常判断部3101、以及更新后判断部3102,作为多个子功能部。
异常判断部3101作为在车辆2的自动驾驶模式下被预测为与基本功能系统6的特性变化相关的行驶变动,按照第一实施方式的异常判断部100来判断与各系统7~9的例如由老化劣化等导致的部件特性变化相关的行驶异常的有无、和有预测的情况下的其他因素的有无。但是,作为异常判断部3101判断行驶异常的管理对象场景M,除了弯曲行驶场所的弯道行驶场景以外,例如也可以监视驻车停车场景、或者高速行驶场景(在后者的情况下也包含与弯道行驶的组合)等。另外,也可以根据这样添加的管理对象场景M,来判断跟随异常Rt、Rv或者这些异常Rt、Rv以外的行驶异常。
更新后判断部3102作为在车辆2的自动驾驶模式下被预测为与基本功能系统6的特性变化相关的行驶变动,判断被预测为由各系统7~9的更新后的特性变化导致的行驶变动的有无。此处,系统7~9的更新也可以为构成系统7~9的部件的更换、系统7~9的控制系统的控制参数的设定变更、或者这些更换以及设定变更的双方。另外,这样的系统7~9的更新可举出基于后述的更新处理部3120的更新处理的设定变更中的更新或者接受指定输出的更新、从外部接受经由通信的指示的更新、满足规定的条件的情况的更新、以及与更新处理部3120的更新处理无关的基于车辆2的用户意图的更新等中的至少一个种类,但也可以为它们以外的更新。并且,作为更新后判断部3102在任一系统7~9的更新后判断的行驶变动,按照异常判断部3101的异常判断,监视管理对象场景M下的行驶异常。
在更新处理部3120中包含部件指定输出部3121、风险判定部3122、参数设定变更部3123、以及参数指定输出部3124,作为多个子功能部。它们中的部件指定输出部3121、参数设定变更部3123、以及参数指定输出部3124通过与由预测判断部3100判断的行驶变动匹配的基本功能系统6的更新,从而发挥功能以便对车辆2施加用于缓和该行驶变动的缓和处理。另一方面,风险判定部3122发挥功能,以便判定用于选择基于参数设定变更部3123和参数指定输出部3124的各缓和处理中的最佳的处理的风险等级。
部件指定输出部3121作为与由异常判断部3101确定了存在判断的行驶异常亦即行驶变动匹配的更新,按照第一实施方式的指定输出部120,将为了缓和该行驶变动而请求更换的更换请求部件X指定输出。换言之,在由异常判断部3101放弃了存在判断的情况下,部件指定输出部3121按照第一实施方式的指定输出部120,推迟更换请求部件X的指定输出。
在部件指定输出部3121中,更换请求部件X例如也可以在车辆2的运动信息等这样的判断材料不充分的情况下,以较大的单位将部件指定输出,另一方面,在该判断材料充分或者详细的情况下,以较小的单位将部件指定输出。此处,在与轮胎有关的具体例中,在判断材料不充分的情况下将轮胎整体指定输出,另一方面,在判断材料充分或者详细的情况下将制动蹄指定输出。另外,在车辆2中左右对称的部件即使仅单侧导致行驶异常,也可以通过将双方作为更换请求部件X指定输出,从而提高车辆2的稳定性以及乘坐舒适性。此处,在与轮胎有关的具体例中,在左侧的制动蹄导致行驶异常的情况下,不仅将该左侧的制动蹄,还将右侧的制动蹄指定输出。
风险判定部3122在各系统7~9的控制系统的控制参数中,作为与由更新后判断部3102判断为存在的更新后的行驶变动匹配的添加更新,对缓和该行驶变动所需的缓和参数的设定变更进行计划。因此,风险判定部3122判定基于所计划的缓和参数的设定变更的风险等级是否在允许范围内。
具体而言,风险判定部3122也可以在基于缓和参数的设定变更的变化量不足阈值或者为阈值以下的情况下做出风险等级在允许范围内的判定,另一方面,在该变化量为阈值以上或者超过阈值的情况下作出风险等级为允许范围外的判定。此时,也可以针对向安全侧的变化量的阈值与针对向风险侧的变化量的阈值相比设定得较大。另外,风险判定部3122也可以例如在预测为由于用于响应于人的检测而控制车辆2的缓和参数的设定变更等,而行驶安全的观点上的影响增大的情况下,作出风险等级为允许范围外的判定。并且,风险判定部3122也可以在更新后判断部3102的存在判断的次数较少期间例如考虑到误判断的可能性等而作出基于更新的风险等级为允许范围外的判定,当该存在判断的次数增大时,作出风险等级在允许范围内的判定。
在根据更新后判断部3102的存在判断而由风险判定部3122判定的风险等级在允许范围内的情况下,参数设定变更部3123发挥功能。该条件成立时的参数设定变更部3123更新由风险判定部3122计划了设定变更的缓和参数。即,参数设定变更部3123在各系统7~9的控制系统的控制参数中,作为与由更新后判断部3102判断为存在的行驶变动匹配的添加更新,对用于缓和该行驶变动的缓和参数进行设定变更。
具体而言,在条件成立时的更新中,参数设定变更部3123也可以使设定变更对象的缓和参数例如恢复为车辆2脱离装配线时等的初始值。在条件成立时的更新中,参数设定变更部3123也可以在之前的更新为部件更换的情况下,调整为根据更换部件的特性估计或者逆运算出的值。在条件成立时的更新中,参数设定变更部3123也可以阶梯式地进行设定变更,以便抑制车辆2的用户因更新而产生的行驶变化。在条件成立时的更新中,参数设定变更部3123例如也可以在部件更换之后的测试跑道Z上的车辆2的行驶时或者停止时等,根据学习部2140作为控制参数进行学习的缓和参数的该学习结果,来对缓和参数进行设定变更。
此处,特别是,在用于由参数设定变更部3123进行设定变更的缓和参数的学习中,也可以通过进行控制使得车辆2的行驶从直线行驶向弯道行驶变化,从而提高学习中的行驶安全。在缓和参数的学习中,也可以通过使车辆2进行变化后的行驶方向相对于变化前的行驶方向变化90度以上的弯道行驶,从而使特别是与制动系统8有关的缓和参数最适合减速场景。在缓和参数的学习中,也可以通过使车辆2进行变化后的行驶方向相对于变化前的行驶方向变化45度以上的弯道行驶,从而使特别是与转向操纵系统9的转向操纵定时或者转向操纵量有关的缓和参数最佳化。
在根据更新后判断部3102的存在判断而由风险判定部3122判定的风险等级为允许范围外的情况下,参数指定输出部3124发挥功能。该条件成立时的参数指定输出部3124将由风险判定部3122计划了设定变更的缓和参数指定输出。即,参数指定输出部3124在各系统7~9的控制系统的控制参数中,作为与由更新后判断部3102判断为存在的行驶变动匹配的添加更新,将请求用于缓和该行驶变动的设定变更的缓和参数指定输出。
在参数设定变更部3123的设定变更处理和参数指定输出部3124指定输出处理的情况下,更新的对象例如均可以在车辆2的运动信息等这样的判断材料不充分的情况下设定为上位的控制参数,另一方面,在该判断材料充分或者详细的情况下设定为下位的控制参数。此处,在具体例中,在判断材料不充分的情况下将目标速度设定为更新的对象,另一方面,在判断材料充分或者详细的情况下将特定区间的制动量以及制动定时设定为更新的对象。在参数设定变更部3123的设定变更处理和参数指定输出部3124的指定输出处理的情况下,对关于车辆2的左右而设定的控制参数而言,均可以即使仅在单侧产生更新的必要性,也将双方设定为更新的对象。此处,在具体例中,在与车辆2的左侧的车道变更有关的控制参数产生更新的必要性的情况下,将与车辆2的右侧的车道变更有关的控制参数也设定为更新的对象。
以下,根据图26,对车辆管理装置1通过至此说明的功能部3100、3120的共同作用来管理车辆2的状态的车辆管理方法的流程进行说明。另外,本流程中的各“S”也分别意味着通过车辆管理程序中包含的多个命令来执行的多个步骤。
在S3101中,预测判断部3100的更新后判断部3102作为在车辆2的自动驾驶模式下被预测为与基本功能系统6的特性变化相关的行驶变动,判断被预测为由各系统7~9的更新后的特性变化导致的行驶变动的有无。其结果是,在作出行驶变动的不存在判断的情况下,本流程移至S101。由此,S101以及接下来的S102由预测判断部3100的异常判断部3101按照第一实施方式的异常判断部100执行。进一步地,从S102分支的S103、S104由更新处理部3120的部件指定输出部3121按照第一实施方式的指定输出部120执行。
在S3101中作出行驶变动的存在判断的情况下,本流程移至S3102。在S3102中,风险判定部3122在各系统7~9的控制系统的控制参数中,作为与通过S3101判断为存在的更新后的行驶变动匹配的添加更新,对缓和该行驶变动所需的缓和参数的设定变更进行计划。在接下来的S3103中,风险判定部3122判定基于所计划的缓和参数的设定变更的风险等级是否在允许范围内。
在S3103中作出风险等级在允许范围内的判定的情况下,本流程移至S3104。在S3104中,参数设定变更部3123更新在S30102中计划了设定变更的缓和参数。另一方面,在S3103中作出风险等级为允许范围外的判定的情况下,本流程移至S3105。在S3105中,参数指定输出部3124将通过S3102计划了设定变更的缓和参数指定输出。
(作用效果)
以下,对以上说明的第三实施方式的作用效果进行说明。
根据第三实施方式,判断被预测为在车辆2的自动驾驶模式下与作为驱动系统7、制动系统8、以及转向操纵系统9的基本功能系统6的特性变化相关的行驶变动的有无。因此,在第三实施方式中,通过与所判断的行驶变动匹配的基本功能系统6的更新,从而对车辆2施加用于缓和该行驶变动的缓和处理。由此,在需要目标跟随性的自动驾驶模式下,即使产生与左右目标跟随性的基本功能系统6的特性变化相关的行驶变动,也能够进行缓和处理以便消除该行驶变动。因此,能够为了确保目标跟随性而适当地管理车辆2的状态。
根据第三实施方式的缓和处理,在构成基本功能系统6的多个部件中,将为了缓和所判断的行驶变动而请求基于更换的更新的更换请求部件X指定输出。由此,即使在自动驾驶模式下产生与左右目标跟随性的基本功能系统6的特性变化相关的行驶变动,也能够通过指定输出来通知用于消除该行驶变动的更换请求部件X。因此,能够为了确保目标跟随性而适当地管理车辆2的状态。
根据第三实施方式的缓和处理,基于基本功能系统6的用于控制车辆2的驾驶的控制参数中,将为了缓和所判断的行驶变动而请求基于设定变更的更新的缓和参数指定输出。由此,即使在自动驾驶模式下产生与左右目标跟随性的基本功能系统6的特性变化相关的行驶变动,也能够通过指定输出来通知用于消除该行驶变动的缓和参数。因此,能够为了确保目标跟随性而适当地管理车辆2的状态。
根据第三实施方式的缓和处理,在基于基本功能系统6的用于控制车辆2的驾驶的控制参数中,通过设定变更来更新用于缓和所判断的行驶变动的缓和参数。由此,即使在自动驾驶模式下产生与左右目标跟随性的基本功能系统的特性变化相关的行驶变动,也能够对缓和参数进行设定变更以便消除该行驶变动。因此,能够为了确保目标跟随性而适当地管理车辆2的状态。
根据第三实施方式的缓和处理,判定基于用于缓和行驶变动的缓和参数的设定变更的风险等级。因此,在判定的风险等级在允许范围内的情况下,通过设定变更来更新缓和参数,另一方面,在该风险等级为允许范围外的情况下,将请求基于设定变更的更新的缓和参数指定输出。由此,即使在自动驾驶模式下产生与左右目标跟随性的基本功能系统6的特性变化相关的行驶变动,也可根据基于消除该行驶变动的缓和参数的设定变更的风险等级,来切换设定变更和指定输出。因此,能够为了确保目标跟随性而适当地管理车辆2的状态。
根据第三实施方式,也可以根据基于车辆2的驾驶结果的学习结果来对缓和参数进行设定变更。在这样的基于学习的设定变更的情况下,即使在自动驾驶模式下与左右目标跟随性的基本功能系统6的特性变化相关地产生行驶变动,也能够通过学习对缓和参数进行设定变更以便消除该行驶变动。因此,能够为了确保目标跟随性而适当地管理车辆2的状态。
(第四实施方式)
第四实施方式是第三实施方式的变形例。
在图27所示的第四实施方式中,在预测判断部4100中包含异常判断部3101和更新后判断部4102,作为多个子功能部。
更新后判断部4102作为在车辆2的自动驾驶模式下被预测为导致行驶变动的基本功能系统6的特性变化,判断各系统7~9的更新的有无。在第四实施方式中,所谓系统7~9的更新,也可以是构成系统7~9的部件的更换、系统7~9的控制系统的控制参数的设定变更、或者这些更换以及设定变更的双方。另外,这样的系统7~9的更新可举出基于后述的更新处理部4120的更新处理的设定变更中的更新或者或者接受指定输出的更新、从外部接受经由通信的指示的更新、满足规定的条件的情况的更新、以及与更新处理部4120的更新处理无关的基于车辆2的用户意图的更新等中的至少一个种类,但也可以为它们以外的更新。
因此,在这样的系统7~9的更新后,在更新部位以外的任意部位,例如有可能由于与更新部位的平衡等而导致行驶变动,因此更新后判断部4102将之前的更新门神虚拟地作为系统7~9的特性变化而判断有无。另外,这样的来自更新后判断部4102的存在判断也可以在全部的更新后作出,例如也可以仅在接受了更新处理部4120的指定输出的之前的更新伴随着由差Δ或者差δ较大的劣化部件引起的行驶异常而进行的情况等添加更新的必要性变高的情况下进行。
在第四实施方式中,在更新处理部4120中包含部件指定输出部3121、风险判定部4122、参数设定变更部4123、以及参数指定输出部4124,作为多个子功能部。
风险判定部4122在各系统7~9的控制系统的控制参数中,作为与作为由更新后判断部4102判断为存在的特性变化的之前的更新匹配的添加更新,对缓和被预测为由该之前的更新导致的行驶变动所需的缓和参数的设定变更进行计划。因此风险判定部4122判定基于所计划的缓和参数的设定变更的风险等级是否在允许范围内。另外,基于第四实施方式的风险判定部4122的具体的判定处理按照第三实施方式的风险判定部3122进行。
在根据更新后判断部4102的存在判断而由风险判定部4122判定的风险等级在允许范围内的情况下,第四实施方式的参数设定变更部4123发挥功能。该条件成立时的参数设定变更部4123更新由风险判定部4122计划了设定变更的缓和参数。即,参数设定变更部4123在各系统7~9的控制系统的控制参数中,作为与作为由更新后判断部4102判断为存在的特性变化的之前的更新匹配的添加更新,对用于缓和被预测为由该之前的更新导致的行驶变动的缓和参数进行设定变更。另外,基于第四实施方式的参数设定变更部4123的具体的设定变更处理按照第三实施方式的参数设定变更部3123进行。
在根据更新后判断部4102的存在判断而由风险判定部4122判定的风险等级为允许范围外的情况下,第四实施方式的参数指定输出部4124发挥功能。该条件成立时的参数指定输出部4124将由风险判定部4122计划了设定变更的缓和参数指定输出。即,参数指定输出部4124在各系统7~9的控制系统的控制参数中,作为与作为由更新后判断部4102判断为存在的特性变化的之前的更新匹配的添加更新,将为了缓和预测为由该之前的更新导致的行驶变动而请求设定变更的缓和参数指定输出。另外,基于第四实施方式的参数指定输出部4124的具体的指定输出处理按照第三实施方式的参数指定输出部3124进行。
根据图28,以下对车辆管理装置1通过至此说明的功能部4100、4120的共同作用来管理车辆2的状态的车辆管理方法的流程进行说明。另外,本流程中的各“S”也分别意味着通过车辆管理程序中包含的多个命令来执行的多个步骤。
在S4101中,预测判断部4100的更新后判断部4102作为在车辆2的自动驾驶模式下被预测为导致行驶变动的基本功能系统6的特性变化,判断各系统7~9的更新的有无。其结果是,在作出更新的不存在判断的情况下,本流程移至S101。由此,S101以及接下来的S102由预测判断部4100的异常判断部3101按照第一实施方式的异常判断部100执行。进一步地,从S102分支的S103、S104由更新处理部4120的部件指定输出部3121按照第一实施方式的指定输出部120执行。
在S4101中作出更新的存在判断的情况下,本流程移至S4102。在S4102中,风险判定部4122在各系统7~9的控制系统的控制参数中,作为与通过S4101判断为存在的之前的更新的添加更新,对缓和预测为由该之前的更新导致的行驶变动所需的缓和参数的设定变更进行计划。在接下来的S4103中,风险判定部4122判定基于所计划的缓和参数的设定变更的风险等级是否在允许范围内。
在S4103中作出风险等级在允许范围内的判定的情况下,本流程移至S4104。在S4104中,参数设定变更部4123更新在S40102中计划了设定变更的缓和参数。另一方面,在S4103中作出风险等级为允许范围外的判定的情况下,本流程移至S4105。在S4105中,参数指定输出部4124将由S4102计划了设定变更的缓和参数指定输出。
(作用效果)
以下,对以上说明的第四实施方式所特有的作用效果进行说明。
根据第四实施方式,判断在车辆2的自动驾驶模式下作为驱动系统7、制动系统8、以及转向操纵系统9的基本功能系统6的被预测为导致行驶变动的特性变化的有无。因此,在第四实施方式中,通过与所判断的特性变化匹配的基本功能系统6的更新来对车辆2施加用于缓和行驶变动的缓和处理。由此,在需要目标跟随性的自动驾驶模式下,即使产生左右目标跟随性的基本功能系统6的特性变化,也能够进行缓和处理以便消除与该特性变化相关的行驶变动。因此,能够为了确保目标跟随性而适当地管理车辆2的状态。
根据第四实施方式,在更换请求部件的更换后判断在车辆2的自动驾驶模式下被预测为导致行驶变动的基本功能系统6的特性变化的有无。因此,在第四实施方式中,通过与在更换后判断的特性变化匹配的基本功能系统6的添加更新来对车辆2施加用于缓和行驶变动的缓和处理。由此,在需要目标跟随性的自动驾驶模式下,即使因更换请求部件的更换而产生左右目标跟随性的基本功能系统6的特性变化,也能够进行缓和处理以便消除与该特性变化相关的行驶变动。因此,能够为了确保目标跟随性而适当地管理车辆2的状态。
根据第四实施方式,在缓和参数的设定变更后判断在车辆2的自动驾驶模式下被预测为导致行驶变动的基本功能系统6的特性变化的有无。因此,在第四实施方式中,通过与在设定变更后判断的特性变化匹配的基本功能系统6的添加更新来对车辆2施加用于缓和行驶变动的缓和处理。由此,在需要目标跟随性的自动驾驶模式下,即使因缓和参数的设定变更而产生左右目标跟随性的基本功能系统6的特性变化,也能够进行缓和处理以便消除与该特性变化相关的行驶变动。因此,能够为了确保目标跟随性而适当地管理车辆2的状态。
根据第四实施方式的缓和处理,在基于基本功能系统6的用于控制车辆2的驾驶的控制参数中,为了缓和被预测为由对基本功能系统6判断的特性变化导致的行驶变动,而将请求基于设定变更的更新的缓和参数指定输出。由此,即使在自动驾驶模式下产生左右目标跟随性的基本功能系统6的特性变化,也能够通过指定输出来通知用于消除与该特性变化相关的行驶变动的缓和参数。因此,能够为了确保目标跟随性而适当地管理车辆2的状态。
根据第四实施方式的缓和处理,在基于基本功能系统6的用于控制车辆2的驾驶的控制参数中,为了缓和被预测为由对基本功能系统6判断的特性变化导致的行驶变动,通过设定变更更新缓和参数。由此,即使在自动驾驶模式下产生左右目标跟随性的基本功能系统的特性变化,也能够对缓和参数进行设定变更以便消除与该特性变化相关的行驶变动。因此,能够为了确保目标跟随性而适当地管理车辆2的状态。
根据第四实施方式的缓和处理,判定基于用于缓和行驶变动的缓和参数的设定变更的风险等级。因此,在判定的风险等级在允许范围内的情况下,通过设定变更更新缓和参数,另一方面,该风险等级为允许范围外的情况下,将请求基于设定变更的更新的缓和参数指定输出。由此,即使在自动驾驶模式下产生左右目标跟随性的基本功能系统6的特性变化,也可根据基于消除与该特性变化相关的行驶变动的缓和参数的设定变更的风险等级,来切换设定变更和指定输出。因此,能够为了确保目标跟随性而适当地管理车辆2的状态。
根据第四实施方式,也可以通过基于车辆2的驾驶结果的学习结果来对缓和参数进行设定变更。由此,即使在自动驾驶模式下产生左右目标跟随性的基本功能系统6的特性变化,也能够对缓和参数进行设定变更以便通过学习来消除与该特性变化相关的行驶变动。因此,能够为了确保目标跟随性而适当地管理车辆2的状态。
(其它的实施方式)
以上,对多个实施方式进行了说明,但本公开并不限定于这些实施方式进行解释,能够在不脱离本公开的主旨的范围内应用于各种实施方式以及组合。
在变形例中,构成车辆管理装置1的专用计算机也可以具有数字电路以及模拟电路中的至少一方作为处理器。此处,所谓数字电路,例如为ASIC(Application SpecificIntegrated Circuit:专用集成电路)、FPGA(Field Programmable Gate Array:现场可编程门阵列)、SOC(System on a Chip:片上系统)、PGA(Programmable Gate Array:可编程门阵列)、以及CPLD(Complex Programmable Logic Device:复杂可编程逻辑器件)等中的至少一个种类。另外,这样的数字电路也可以具有储存了程序的存储器。
在变形例中,构成车辆管理装置1的专用计算机例如也可以是设置于维修工厂、经销商、以及远程辅助中心等中的至少一个场所且能够在与车辆2之间进行无线通信的外部计算机。另外,在这种情况下,也可以S103中的指定输出部120、3121通过将与指定的更换请求部件X相关的更换信息I通过无线通信向这样的外部计算机发送,来实现该部件X的指定输出。
在变形例中,异常判断部100、3101也可以通过不执行S102中的其他因素的预测,从而在S101中基于关注差确定存在行驶异常的判断。另外,在这种情况下,例如,如图29所示的那样,S101中的异常判断部100、3101也可以使用多个段a~d的值作为用于判断关注差的阈值。
此处,在图29的例子中,在关注差超过阈值a或者为阈值a以上的允许范围外中,在该差为阈值b以下或者不足阈值b的情况下,执行S103的指定输出和S104的推迟中的与使用状况对应的一方。另外,在图29的例子中,在关注差超过阈值a、b超过或者为阈值a、b以上的允许范围外中,在该差为阈值c以下或不足阈值c的情况下,S104的推迟与伴随着S103的指定输出的更换期间的指定一起执行。进一步地,在图29的例子中,在关注差超过阈值a、b、c或者为阈值a、b、c以上的允许范围外中,在该差为阈值d以下或不足阈值d的情况下,S103的指定输出与自动驾驶模式的禁止控制一起执行。
另外,在图29中,作为除了自动驾驶模式以外还在驾驶控制中假定手动驾驶模式的情况的例子,在关注差超过全部阈值或者为全部阈值以上的允许范围外,S103的指定输出与全驾驶模式的禁止控制一起执行。因此,在仅实现自动驾驶模式的车辆2中,实质上不需要该执行。
- 一种车辆管理方法及相关装置
- 车辆管理方法及装置
- 一种车辆管理方法、装置、终端及计算机可读存储介质
- 智能车牌、车辆管理方法及装置
- 车辆组管理装置、车辆组管理方法、车辆组管理程序和车辆组显示装置
- 管理装置、车辆通信系统、车辆、车辆通信管理方法及车辆通信管理程序