光刻机照明均匀性校正装置的校正方法
文献发布时间:2023-06-29 06:30:04
技术领域
本发明涉及光刻机照明系统,特别是一种光刻机照明系统的照明均匀性校正装置的校正方法。
背景技术
在光刻机中,照明系统的作用是将激光器出射的光束进行一些调整,为掩膜提供高质量的照明场,从而保证掩膜图形通过投影物镜高质量的成像至硅片面上。均匀的照明场能够降低光刻工艺因子,提高整个光刻系统的分辨率。但随着光刻技术的不断发展,特征尺寸的不断减小,光刻对照明系统的均匀性要求也随之不断提高,如,90nm光刻机中的照明系统的均匀性要求在1%左右,而65nm以及45nm光刻机中的照明系统的不仅要求均匀性达到0.2%,而且要求均匀性波形曲线符合某种分布特征,这样仅仅使用传统的匀光器件以及匀光方法已经很难满足均匀性要求,因此为了达到照明系统的均匀性要求,需要在系统中增加照明均匀性校正装置。
在先技术(US7173688)描述了一种手指式的均匀性校正装置。该装置在照明视场扫描方向的两边对称排布着多个校正单元,每个校正单元均呈矩形平板结构,并且均可独立的沿视场的扫描方向插入视场边缘以遮挡部分照明光,达到调整照明视场在扫描方向的积分能量分布均匀性的目的。该专利不仅简单阐述了单元在照明场内的作用机理,并且阐述了该校正方法对照明光瞳的对称度、椭圆度以及能量损失等的影响,而且描述了一种基于加权最小二乘法的校正方法。
在先技术(US20070103665)描述了一种单元式的均匀性校正装置,该装置与在先技术(US7173688)描述的校正方法类似,前者着重阐述了单元的形状与排布对校正能力的影响,其校正方法同样也是基于加权最小二乘法。
而在先技术(CN101221373)以及在先技术(CN1027220901)描述了的校正装置均与先技术(US7173688)描述的类似,前二者只是针对校正单元的形状以及排布进行了改进,实现不同的校正效果,并没有涉及校正装置的校正算法。
发明内容
虽然上述照明系统的照明均匀性校正装置能调整照明场的均匀性,但是同样也会干扰照明光瞳均匀性(如:照明光瞳的对称度和椭圆度等),也就是说每一个校正单元在照明视场的扫描方向的位置,决定了照明积分均匀性以及光瞳均匀性。本发明的目的是针对上述在先技术的不足,提供一种光刻机照明系统的照明均匀性校正装置的校正方法,该校正方法旨在确定每一个校正单元的位置,使其不仅满足照明积分均匀性的要求,而且要满足对照明光瞳均匀性的影响达到最小。进一步,将遗传算法融合于该校正方法中,使得该校正方法能够高效的、准确的找到符合照明系统要求的校正单元位置。
本发明的技术解决方案如下:
一种光刻机照明均匀性校正装置的校正方法,所述光刻机照明均匀性校正装置包括:基座、上校正模块和下校正模块,所述上校正模块和下校正模块具有相同结构,分别固定于所述基座的上部与下部,并相对于所述基座的中心平面对称分布;光刻机照明光场垂直于该中心平面,两平面的交点为坐标系原点,垂直于所述光刻机照明光场为光轴方向,即z轴,垂直于中心平面为光刻机照明系统的扫描方向,即y轴,x轴为光刻机照明系统的非扫描方向;所述上校正模块和下校正模块在光刻机照明光场的扫描方向对称排布多个校正单元;
所述校正方法用于确定各个校正单元在光刻机照明光场的扫描方向的位置,所述校正方法包括下列步骤:
a):利用校正单元对照明积分均匀性进行标定;
b):利用校正单元对光瞳均匀性进行标定;
c):根据照明积分均匀性标定和光瞳均匀性标定所获得的数据对照明积分均匀性波形进行校正;
d):是否满足照明积分均匀性波形分布要求,若是,对照明积分均匀性校正进行优化,以确定各个校正单元在光刻机照明光场的扫描方向的位置。
进一步优选的,步骤a)包括步骤:
a1):初始化,设置所有校正单元处于照明视场外,且规定此处校正单元的位移为零;距离零点为s
a2):选定一个校正单元进行标定;
a3):测量照明视场在扫描方向的积分均匀性,并做归一化处理;
a4):判断校正单元是否处于最大极限位移,如果没有达到其最大位移,执行步骤a5,若是,执行步骤a6;
a5):将校正单元在扫描方向的位移增加一固定值smax/n,并返回所述步骤a2;
a6):将当前校正单元的位移归零,及将所测的归一化积分均匀性与对应校正单元的位移进行多项式拟合;
a7):判断是否所有校正单元均被标定,若否,则返回所述步骤a2,若是,则结束校正单元对照明积分均匀性的标定。
进一步优选的,所述利用校正单元对光瞳均匀性标定包括步骤:
b1):利用相邻校正单元对光瞳均匀性进行标定;
b2):利用相对校正单元对光瞳均匀性进行标定。
进一步优选的,步骤b1)包括步骤:
b11):初始化;
b12):选定一对相邻校正单元进行标定,并设定其中一个为主校正单元,另一个为从校正单元;
b13):测量照明视场光瞳均匀性,并做归一化处理;
b14):判断从校正单元是否处于最大极限位移,若否,执行步骤b15,若是,执行步骤b16;
b15):将从校正单元在扫描方向的位移增加一固定值smax/n,并返回步骤b13;
b16):判断主校正单元是否处于最大位移,若否,执行步骤b17,若是,执行步骤b18;
b17):将当前处于最大极限位移的从校正单元的位移归零,并将主校正单元在扫描方向的位移增加一固定值smax/n,返回所述步骤b13;
b18):将当前主校正单元的位移归零,将所测得的归一化光瞳均匀性与对应主、从校正单元的位移采用散点曲面重构法进行曲面拟合;
b19)判断是否所有相邻校正单元均完成标定,若否,则返回所述步骤b12,若是,则结束相邻校正单元对光瞳均匀性的标定。
进一步优选的,步骤b2)包括步骤:
b21):初始化;
b22):选定一对相对校正单元进行标定,并设定其中一个为主校正单元,另一个为从校正单元;
b23):测量照明视场光瞳均匀性,并做归一化处理;
b24):判断从校正单元是否处于最大位移,若否,执行步骤b25,若是,执行步骤b27;
b25):将从校正单元在扫描方向的位移增加一固定值smax/n,并返回所述步骤b23);
b26):判断主校正单元是否处于最大位移,若否,执行步骤b27,若是,执行步骤b28;
b27):将当前从校正单元的位移归零,将主校正单元在扫描方向的位移增加一固定值smax/n,并返回所述步骤b23;
b28):将当前主校正单元的位移归零,将所测得的归一化光瞳均匀性与对应主、从校正单元的位移采用散点曲面重构法进行曲面拟合;
b29):判断是否所有相对校正单元均完成标定,如果还有相对校正单元没有完成标定,则返回所述步骤b22,如果所有相对校正单元均完成标定,则结束相对校正单元对光瞳均匀性的标定。
进一步优选的,步骤c)包括步骤:
c1):初始化;
c2):测量照明视场在扫描方向的积分均匀性,并做归一化处理;
c3):将测得的归一化积分均匀性进行多项式拟合,得到拟合曲线U=cf(x),并将光强值U线性转化到校正单元的位移y,得到曲线y=cf(x);
c4):根据校正单元对均匀性标定的数据,确定每个校正单元作用区域的中心坐标x
c5):判断照明视场是否满足均分均匀性的波形分布要求,如果满足波形分布要求,则进行所述步骤d,如果不满足波形分布要求,则进行下一步;
c6):设定y
进一步优选的,步骤d)包括步骤:
d1):对每个校正单元的位移设定一个浮动区间±dy,即校正单元的位移可能处于[y
d2):根据所述标定得到的数据,计算校正单元处于每一组位移下照明视场积分均匀性以及光瞳均匀性,并根据计算得到的两个数据的倒数之和来确定每一组校正单元位移的适应度,以获取每个个体的适应度A
d3):判断解群中是否存在个体的适应度满足预设期望值,如果存在,则将满足适应度预设期望值的个体视为最优解,照明积分均匀性校正优化结束,如果不存在,则进行下一步;
d4):根据所述步骤d2得到的每个个体的适应度确定每个个体被选择的概率S
d5):对两个新的子解按照变异规则进行变异操作;
d6):判断交配得到的子解个数是否达到预设值m,如果数量没有达到预设值m,则返回所述步骤d4,如果数量到达预设值m,则进行下一步;
d7):将m个子解替代先前的解群作为新一代可行解群,返回步骤d2,进入下一轮进化。
本发明将传统遗传算法应用于光刻机照明均匀性校正装置中,通过所述校正单元对照明积分均匀性标定、所述相邻校正单元对光瞳均匀性的标定以及所述相对校正单元对光瞳均匀性的标定找到校正单元位置信息与照明积分均匀性以及光瞳均匀性的相互关系,并以此为适应度函数,并且通过照明积分均匀性波形校正找到的校正单元位置解能大大缩小传统遗传算法中的随机初解群的规模,使得照明积分均匀性校正优化能更快速的找到最优解。较之现有技术,本发明的方法与之完全不同,大大丰富了该算法的研究内容,较之传统遗传算法,本发明能更高效地找到更符合照明系统要求的校正单元位置。
附图说明
图1A为本发明的照明均匀性校正装置应用于光刻机中的示意图。
图1B为本发明应用的照明均匀性校正装置的结构示意图。
图1C为校正单元分布示意图。
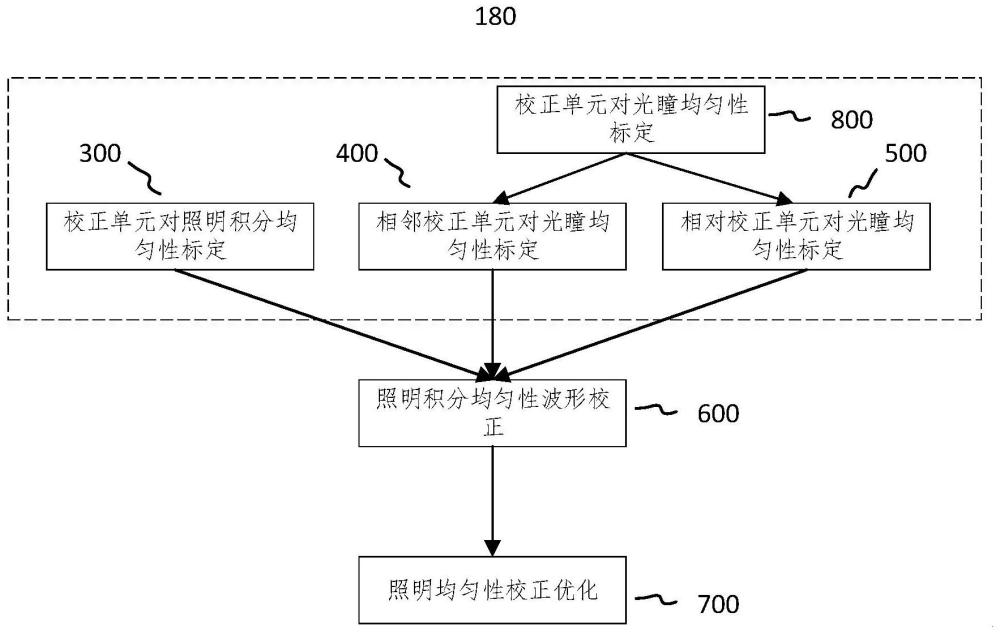
图2为本发明的照明均匀性校正装置的校正方法的结构框图。
图3为本发明的校正算法中校正单元对照明积分均匀性标定的流程框图。
图4为本发明的校正算法中相邻校正单元对光瞳均匀性标定的流程框图。
图5为本发明的校正算法中相对校正单元对光瞳均匀性标定的流程框图
图6为本发明的校正算法中照明积分均匀性波形校正的流程框图。
图7为本发明的校正算法中照明积分均匀性校正优化的流程框图。
具体实施方式
下面结合附图以及具体实施方式对本发明进行进一步详细的描述。
如图1A所示为本发明的照明均匀性校正装置应用于光刻机中的示意图,图1B所示为本发明适用的照明均匀性校正装置的结构示意图。典型投影式曝光光刻机的光学系统100包括照明系统110,掩膜板130,投影物镜140以及硅片150等。照明系统110为光刻系统提供均匀的照明场190,其产生的均匀照明场190照射到掩膜板130上,并通过投影物镜140成像到硅片150上进行曝光。均匀性校正装置120位于照明系统110与掩膜板130之间,探测器160位于硅片150附近,其探测得到的数据165经测量系统170处理后得到数据175,均匀性校正装置控制算法系统180中装载有本申请提供的校正方法所对应的校正程序,该校正程序通过运行该校正方法得到每个校正单元的位移信息185,并将其输送给均匀性校正装置120控制每个校正单元进行校正。
具体的,均匀性校正装置120包括:基座121、上校正模块122和下校正模块123,上校正模块121和下校正模块123具有相同结构,分别固定于基座121的上部与下部,并相对于基座121的中心平面对称分布;光刻机照明光场190垂直于该中心平面,两平面的交点为坐标系原点,垂直于光刻机照明光场190为光轴方向,即z轴方向,垂直于中心平面为光刻机照明系统的扫描方向,即y轴方向;上校正模块122和下校正模块123在光刻机照明光场的扫描方向对称排布多个校正单元124。其中,校正单元124的排布如图1C所示。
关于本申请中的均匀性校正装置120的详细结构设计请参考专利CN107065443B公开授权的光刻机照明均匀性校正装置,本申请对均匀性校正装置120的详细结构不作赘述。
图2所示为照明均匀性校正装置控制算法系统180的组成部分。虚线部分为照明均匀性校正装置控制算法系统180的线下标定方法,包括校正单元对照明积分均匀性标定300和校正单元对光瞳均匀性标定800,其中校正单元对光瞳均匀性标定800分为相邻校正单元对光瞳均匀性标定400以及相对校正单元对光瞳均匀性标定500。根据这些标定得到的数据,照明均匀性校正装置控制算法系统180应用照明积分均匀性波形校正600,在满足照明积分均匀性波形分布特征的情况下,然后应用照明均匀性校正优化700。
具体包括如下步骤:
a):利用校正单元对照明积分均匀性进行标定;
b):利用校正单元对光瞳均匀性进行标定;
c):根据照明积分均匀性标定和光瞳均匀性标定所获得的数据对照明积分均匀性波形校正;
d):是否满足照明积分均匀性波形分布要求,若是,对照明积分均匀性校正优化,以确定各个校正单元在光刻机照明光场的扫描方向的位置。
通过上述步骤a)-d)能够高效的、准确的找到照明均匀性校正装置中各个校正单元在光刻机照明光场的扫描方向的位置,使其不仅满足照明积分均匀性的要求,而且满足对照明光瞳均匀性的影响达到最小,下面对该校正方法具体实现进行详细描述。
图3所示为校正方法步骤a利用校正单元对照明积分均匀性进行标定的流程框图。该步骤a)具体包括如下步骤:
a1):初始化,需初始化每一个校正单元,即设置所有校正单元125全部处于照明视场外,且规定此时校正单元125的位移为零,距离零点为s
a2):选定一个校正单元进行标定。
a3):通过探测器160测量照明视场在扫描方向的积分均匀性,为方便计算与分析,并做归一化处理,得到照明视场积分均匀性分布U
a4):判断当前校正单元是否处于最大位移,如果没有达到其最大位移,则进行步骤a5),如果达到其最大极限位移,则进行所述步骤a6:。
a5):将当前校正单元在扫描方向的位移增加一固定值s
a6):首先需将当前选定并处于最大位移的校正单元归零,并将所测得的归一化积分均匀性U
a7):判断所有校正单元是否都完成标定,如果没有完成,则返回步骤a2,如果均已完成,则结束校正单元对照明均匀性的标定。
其中,步骤b中利用校正单元对光瞳均匀性标定包括步骤:
b1):利用相邻校正单元对光瞳均匀性进行标定;
b2):利用相对校正单元对光瞳均匀性进行标定。
图4所示为步骤b1中利用相邻校正单元对光瞳均匀性进行标定的流程框图。步骤b1具体包括如下步骤:
b11):初始化,即归一化每个校正单元。
b12):选定一对相邻校正单元进行标定,并设定其中一个为主校正单元,另一个为从校正单元。
b13):使用探测器160来测量光瞳均匀性并做归一化处理,得到光瞳均匀性分布PA
b14):判断从校正单元是否处于最大位移,如果没有处于其最大位移,则执行步骤b15,如果处于其最大位移,则执行步骤b16。
b15):将当前校正单元在扫描方向的位移增加一固定值s
b16):判断主校正单元是否处于最大位移,如果还没有到达其最大位移,则执行步骤b17,如果已经处于其最大位移,则执行所述步骤b18。
b17):首先将当前处于最大位移的从校正单元的位移s
b18):中首先需将当前选定并到达最大位移的主校正单元的位移归零,并将所测得光瞳均匀性PA
b19):判断所有相邻校正单元是否都被标定,如果没有,则返回所述步骤b12,如果均完成标定,则结束相邻校正单元对光瞳均匀性作用的标定。
图5所示为步骤b2中相对校正单元对光瞳均匀性作用标定的流程框图。该步骤b2具体包括如下步骤:
b21):初始化,即归一化每个校正单元。
b22):选定一对相对校正单元进行标定,并设定其中一个为主校正单元,另一个为从校正单元。
b23):使用探测器160来测量光瞳均匀性并做归一化处理,得到光瞳均匀性分布PA
b24):判断当前从校正单元是否处于最大位移,如果没有处于其最大位移,则执行步骤b25,如果处于其最大位移,则执行所述步骤b27
b25):将当前校正单元在扫描方向的位移增加一固定值s
b26):判断主校正单元是否处于最大位移,如果还没有到达其最大位移,则进行所述步骤b27,如果已经处于其最大位移,则执行所述步骤b28。
b27):首先将当前处于最大位移的从校正单元的位移s
b28):首先需将当前选定主校正单元的位移归零,并将所测得光瞳均匀性PA
b29):判断所有相对校正单元是否都被标定,如果没有,则返回所述步骤b22,如果均完成标定,则结束相对校正单元对光瞳均匀性作用的标定。
图6所示为校正方法步骤c对照明均匀性波形校正的流程框图。该步骤c具体包括如下步骤:
c1):初始化,即归一化每个校正单元。
c2):通过探测器160测量照明场在扫描方向的积分均匀性,为了方便计算与分析,并做归一化处理。
c3):将测得的积分均匀性进行多项式拟合,得到拟合曲线U=cf(x),并进行坐标转化(即将光强值U线性转化到校正单元的位移y)得到曲线y=cf(x)。
c4):根据校正单元对照明积分均匀性标定算法标定得到的数据,确定每个校正单元作用区域的中心坐标x
c5):判断照明场是否满足均匀性的波形分布要求,如果满足要求,则进行照明积分均匀性校正优化算法,如果不满足要求,则进行下一步。
c6):设定y
在本申请中,将遗传算法融合于该校正方法中,使得该校正方法能够高效的、准确的找到符合照明系统要求的校正单元位置,其中,遗传算法的基本思想是基于Darwin进化论和Mendel的遗传学说的。其基本原理如下:
长度为L的n个串b
1.选择(Selection)
这是从群体中选择出较适应环境的个体。这些选中的个体用于繁殖下一代。
2.交叉(Crossover)
这是对两个不同的个体的相同位置的基因进行交换,从而产生新的个体。
3.变异(Mutation)
这是对个体中的某些基因执行变异转化。在串bi中,如果某位基因为1,产生变异时就是把它变成0;反亦反之。
遗传算法的算法可以简要给出如下:
1)选择一个初始种群;
2)评价每个个体的适应度;
3)进行选择操作;
4)进行交叉操作;
5)进行变异操作;
6)评价每个个体的适应度;
7)进行选择操作;
8)重复步骤4)~7),直至满足某一结束准则。
图7所示为步骤d对照明积分均匀性校正优化的流程框图。结合遗传算法的应用进行校正优化,该步骤d具体包括如下步骤:
d1):设定每个校正单元的位移具有一个浮动区间±dy,即校正单元的位移可能处于[y
d2):根据标定得到的数据计算校正单元处于每一组位移下照明场积分均匀性U
d3):判断解群中是否存在适应度A
d4):根据步骤d2得到的每个个体的适应度确定每个个体被选择的概率S
d5):对两个新的子解按照变异规则进行变异操作。
d6):判断交配得到的子解数量是否达到预设值m,如果没有得到,则返回步骤d4,如果达到,则用m个新子解顶替原来的解群,进行下一轮的进化,即返回所述步骤d2。
本发明将传统遗传算法应用于光刻机照明均匀性校正装置中,通过校正单元对照明积分均匀性标定、相邻校正单元对光瞳均匀性的标定以及相对校正单元对光瞳均匀性的标定找到校正单元位置信息与照明积分均匀性以及光瞳均匀性的相互关系,并以此为适应度函数,并且通过照明积分均匀性波形校正找到的校正单元位置解,能大大缩小传统遗传算法中的随机初解群的规模,使得照明积分均匀性校正优化能更快速、高效地找到最优解。较之现有技术,本发明的方法与之完全不同,大大丰富了该算法的研究内容,较之传统遗传算法,本发明能更高效地找到更符合照明系统要求的校正单元位置。
- 像差校正系统、光刻机及像差校正方法
- 基于多层闪烁晶体探测器的系统均匀性校正方法及装置
- 一种校正关系获取装置、方法及校正光探测元件的装置
- 光刻机照明均匀性校正装置和校正方法
- 光刻机照明均匀性校正装置和校正方法