评估光刻工艺的元件的缺陷的未知效应的方法与装置
文献发布时间:2023-06-19 09:24:30
本申请要求2018年5月18日提交的德国专利申请DE 10 2018 207 880.7的优先权,该申请的全部内容通过引用并入本文。
技术领域
本发明关于一种评估光刻工艺中的元件的缺陷的未知效应的方法与装置。特别是,本发明关于一种通过应用在图像、有关该图像的设计数据、及由该图像产生的缺陷的效应之间建立关系的机器学习(Machine Learning,ML)模型,针对光刻工艺中的一个或多个元件评估缺陷的未知效应的方法与装置。
背景技术
由于半导体产业中的集成密度不断增加,用于纳米压印光刻术的光刻掩模或模板必须在晶片上成像越来越小的结构。在半导体晶片上以及因此在用于曝光晶片的光刻掩模、光掩模或仅仅掩模上的微型化结构方面的进步,对检验光刻掩模、计量掩模、及分析掩模缺陷具有深远效应。通常,借助于测量掩模部分的空间像(aerial image)并将该掩模部分的空间像与掩模部分的参考空间像进行比较来分析光掩模。在专业领域中,此流程称为裸芯对裸芯(die-to-die)方法。可基于此比较确定该掩模部分的缺陷的缺陷机率图、缺陷图、或缺陷效应图。
光掩模上的结构的复杂性日益提高,例如通过更时常应用光学邻近校正(Opticalproximity correction,OPC)放大,可能导致掩模上某些结构不再重复或仅偶尔重复(所谓单裸芯掩模)。因此,不再可能通过前述裸芯对裸芯方法进行这种掩模的品质评估(如缺陷检验或缺陷检阅),或只有在花费更大的情况下才得以进行,即在花费较长时间搜寻合适参考位置之后。
可在这情况下(但亦与其无关)使用的方法是所谓的裸芯比对数据库(die-to-database)方法,其中参考空间像借助来自设计数据(例如来自布局数据)的光学成像模拟(渲染(rendering))得到。其中参考图像从掩模的设计数据产生的方法可不受到前述问题影响。
借助于该模拟的掩模的参考空间像,可能事先以两种方式产生。首先,参考空间像可借助于从头开始(ab-initio)或严密模拟计算出。然而,基于从头开始模拟(其数值求解麦克斯韦方程式)生成用于分析缺陷和/或用于校正缺陷的参考空间像非常耗时,因此目前以及在不久的将来,很难在制造环境中实践。
其次,为了借助模拟从设计数据产生参考空间像,可使用已知为“基尔霍夫模型(Kirchhoff model)”或“标量成像模型(scalar imaging model)”的简化模型,其假设掩模结构为二维的且衍射波自由传播。基于该基尔霍夫模型模拟参考空间像比严密模拟更快速几个数量级;然而,无法足够准确成像所有的掩模效应。因此,通过基尔霍夫模型生成的参考空间像的品质在许多情况下皆不足。
在新的进一步方法中,目前正在尝试借助于机器学习(ML)模型解决对光掩模进行品质评估方面的众多挑战。下列专利文献为针对此流程而以示例性方式明确说明:WO2017/087 653 A1、WO 2017/117 568 A1、WO 2017/120 253 A1、WO 2017/123 555 A1、WO2017/123 561 A1、WO 2017/117 573 A1、WO 2017/123 555 A1及WO 2017/205 537 A1。
如前文所解说,生成用于光刻掩模的参考空间像为复杂程序,无论是通过测量还是借助于模拟。
因此,本发明基于以下目的:明确说明一种在评估光刻掩模的品质时至少部分避免前述缺点的方法与装置。
发明内容
根据本发明的一个方面,此问题通过例如权利要求1的方法解决。
一种决定光刻工艺中的元件的缺陷的至少一个未知效应的方法可包含下列步骤:(a)针对一图像、有关该图像的设计数据、以及由该图像产生的光刻工艺中的元件的缺陷的至少一个效应之间的关系,提供机器学习模型;(b)使用用于训练目的的大量图像、有关用于训练目的的图像的设计数据、以及缺陷的对应效应,训练机器学习模型;以及(c)通过将训练的机器学习模型应用于测量的图像及有关该测量的图像的设计数据,以决定缺陷的至少一个未知效应。
根据本发明的方法避免了能够评估光刻掩模和/或晶片的品质的参考图像的复杂生成。此外,根据本发明的方法将测量的图像与参考图像进行比较。
举例来说,机器学习模型或ML模型的复杂训练程序可针对指定掩模类型和生成空间像的某个光学测量系统执行一次。举例来说,该训练程序可在为了此目的而最佳配备的中心位置处执行。然后,用于不同掩模类型的训练的ML模型可配置有光学测量或成像系统及制造环境中的设计数据。通过将训练的ML模型应用于测量的空间像,并通过提供相关联设计数据,然后可直接或在最小限度拟合(fitting)之后,决定测量的空间像所代表的掩模的部位中的缺陷的事先未知效应。
机器学习模型从经验生成知识。机器学习模型从学习或训练阶段中以训练或学习数据的形式提供给该模型的示例学习。使用此方式,模型的内部变量(例如参数映射(parametric mapping)的参数)可由合适值占用,以能够说明训练数据中的关系。因此,通常,训练阶段中的ML模型并非简单地通过记忆,而是识别训练数据中的模式和/或规则来学习训练数据。所学习的关系的品质通常会基于验证数据进行评估,以评估训练的模型对新数据(即在训练期间未知的数据)的普遍适用性。若提供相关联设计数据,则训练的ML模型可应用于光刻工艺中的元件,以预测ML模型未知的图像中缺陷的潜在效应。在完成训练阶段之后,若提供相关联设计数据,则成功训练的ML模型(即具有良好普遍适应性的训练的ML模型)因此能够评估其未知的数据(即未知图像)。
该图像可包含来自下列组的至少一个元素:通过光学测量系统记录的图像、通过扫描粒子显微镜记录的图像,以及通过扫描探针显微镜记录的图像。
光学测量系统可包含AIMS
应用根据本发明的方法不限于通过光学测量系统记录的图像。而是,根据本发明的方法可用于通过不同成像模态(imaging modality)生成的图像。
设计数据可包含来自下列组的至少一个元素:布局数据及计算机辅助设计(Computer-aided design,CAD)数据。可以像素数据和/或多边形(polygons)或多边形链的形式取得该设计数据。
机器学习模型可包含子符号(sub-symbolic)系统。
在符号系统的情况下,知识(即训练数据和所引致的规则)被明确地表现。但是,在子符号系统中,是在对所学习的解决方案路径没有详细观察的情况下,将可计算行为教导给模型。
机器学习模型可包含来自下列组的至少一个元素:参数映射、人工神经网路(Artificial neural network,ANN)、深度神经网路(Deep neural network,DNN)、时间延迟神经网路、卷积神经网路(Convolutional neural network,CNN)、递归神经网路(Recurrent neural network,RNN)、长短期记忆(Long short-term memory,LSTM)网路,以及生成(generative)模型。
判别(discriminative)模型可从输入数据生成输出数据;生成模型可从输入数据生成输出数据,并可附加再生成该输入数据。
机器学习模型可包含:(a)至少一个编码器区块,用于决定图像的信息携带特征及有关该图像的设计数据;以及(b)至少一个解码器区块,用于从决定的信息携带特征生成缺陷的至少一个效应。
此外,机器学习模型可包含:(a)至少一个编码器层,用于决定图像的信息携带特征及有关该图像的设计数据;以及(b)至少一个解码器层,用于从决定的信息携带特征生成缺陷的至少一个效应,其中缺陷的效应显示图像与参考图像的叠加(overlay)概况。
机器学习模型可包含至少2层、最好为10至1500层、更好为15至1000层,以及更好为30至100层。
机器学习模型的各层可能实现各种参数化与非参数化函数。因此,人工神经网路可包含两个或多个卷积层以及两个或多个去卷积层。在本说明书,卷积滤波器的尺寸可能选择为较大,尤其是针对少数卷积层,以能够在该处理期间使用足够多的数据。此外,人工神经网路可包含两个或多个汇集层(pooling layer)及两个或多个去汇集层(de-poolinglayer)。而且,机器学习模型可含有用于实现复杂关系的两个或多个非线性激活函数(activation functions),例如双曲正切、S形和/或分段线性函数。与其无关,机器学习模型可含有两个或多个自适应归一化(adaptive normalization)层,例如批量(batch)归一化。
根据本发明的方法可更包括下列步骤:将机器学习模型的若干层拟合至空间像的预定或需求的准确度。特别是,根据本发明的方法可包括下列步骤:将若干编码器层和/或解码器层拟合至图像的预定准确度。
人工神经网路(ANN)通常由多个层的链接构成,所以实现例如将输入顺序变换为输出。网络的拓扑结构(即层数),即,每层的函数选择、每一个层的参数或模型参数(例如滤波器核的数量和大小),以及个别层之间的连接,皆依要达成的目的来选择。在本说明书,ANN的一个层的输出可提供为不仅是后续层的输入。
光刻工艺中的元件可包含来自下列组的至少一个元素:光刻掩模、用于纳米压印技术的模板,以及晶片。光刻掩模可包含透射或反射掩模。
根据本发明的方法不限于决定光刻掩模中缺陷的布置。而是,还可用于分析来自纳米压印技术和晶片的领域的模板。
所述缺陷可包含来自下列组的至少一个元素:光刻工艺中的一个或多个元件的一个或多个图案元件的设置误差;光刻工艺中的元件的一个或多个图案元件的关键尺寸(Critical dimension)误差;及光刻工艺中的元件的材料缺陷。
决定缺陷的至少一个未知效应可包含对下列问题之一的至少一个答案:缺陷的效应是否低于预定临界值?缺陷是否在晶片上可见?在晶片上可见的缺陷是否可校正?
通过光学成像系统记录的图像可包含空间像,和/或该空间像可包含空间像聚焦堆叠(focus stack)。
相同设计数据构成聚焦堆叠的各种空间像的基础。预测光刻工艺中的元件缺陷的效应的精确度,可通过使用空间像聚焦堆叠(而非个别空间像)对ML模型执行至少部分训练而提高。为此目的所需的ML模型可实现为例如共同模型,其接收来自空间像聚焦堆叠或个别空间像的数据作为输入。然而,还可能使用经由例如共同参数值耦合的两个单独ML模型。
训练机器学习模型可包含:提供用于训练目的的大量空间像及有关用于训练目的的空间像的大量设计数据作为输入数据,以及提供对应于用于训练目的的空间像的缺陷的大量效应作为用于机器学习模型的输出数据的比较数据。
本申请的特点之一在于,在训练阶段期间及在使用阶段期间,在每种情况下皆向ML模型呈现来自两个数据来源的数据,前述数据来源彼此具有连接。
用于训练目的的空间像可包含测量的空间像和/或模拟的空间像。
根据本发明的方法的优势在于,无需测量训练目的所需的所有空间像。
根据本发明的方法可更包括下列步骤:为了生成模拟的图像的目的,模拟光刻工艺中的元件的设计数据和/或修改的设计数据。此外,根据本发明的方法可包括下列步骤:为了生成模拟的空间像的目的,模拟光刻掩模的设计数据和/或修改的设计数据。
训练数据记录应包含无缺陷的图像或空间像,即分别可用作参考图像和参考空间像的图像或空间像。然而,此外,训练数据记录应还包含图像/空间像,其具有大量光刻工艺中的元件的已知相关缺陷或光掩模的情况下的已知相关掩模缺陷。若用于训练目的的图像/空间像已借助于模拟工具部分或整体产生,则构成模拟的图像/空间像的基础的设计数据可能以模拟的图像/空间像展示光刻工艺中的元件的已知相关缺陷(例如已知相关掩模缺陷)的方式改变或修改。
生成模拟的图像/空间像可包含来自下列组的至少一个元素:通过数值求解麦克斯韦方程式执行严密模拟,其中光刻工艺中的元件的设计数据和/或修改的设计数据用作输入数据;借助于基尔霍夫模型执行模拟,其中光刻工艺中的元件的设计数据和/或修改的设计数据用作输入数据;执行基于粒子束的成像模拟,其中光刻工艺中的元件的设计数据和/或修改的设计数据用作输入数据;以及执行基于扫描探针的成像模拟,其中光刻工艺中的元件的设计数据和/或修改的设计数据用作输入数据。
训练机器学习模型可包含决定机器学习模型的可学习参数。在卷积层的情况下,训练机器学习模型可包含决定滤波器掩模的加权。
在卷积与去卷积层的情况下,可学习参数通常是个别卷积层的滤波器掩模的加权。为了提高模型复杂性,层的卷积结果经常另外以非线性方式变换。为此目的,如前所述,借助离散卷积确定的每个神经元的输入皆借助于激活函数转换为卷积层中的输出,即例如通过应用S形函数(sig(t)=0.5·(1+tanh(t/2))或整流的线性单位(ReLU,f(x)=max(o,x))。串联(concatenation)多个卷积层(每个皆包含激活函数)允许针对感知目标及针对各种资料模态之间(例如设计数据与图像资料之间)的变换两者,从提供的数据学习复合模式。
本申请中所采用ML模型具有以下特点:ML模型基于两个输入数据记录(具体而言图像和设计数据)预测输出(具体而言光刻工艺中的元件的至少一个缺陷的至少一个效应)。在第一实施例中,两个输入数据记录可串联(concatenated)形成单个输入。在此实施例中,ML模型的架构与惯用示例性实施例无异。
然而,在第二实施例中,ML模型还可能在用于结合于该ML模型内的两个图像和设计数据输入的输入侧上,具有两个单独分支或输入分支。此第二实施例促成单独处理该两个输入,以针对在该ML模型的一个或多个共同层中的共同处理以针对性方式准备这两个输入。该ML模型的两个单独输入分支可能具有相同层数。然而,目前优选的是将该ML模型的两个输入分支的层数拟合至相应输入数据的细节(specifics)。两个单独输入分支的个别层可彼此连接。
ML模型的第二实施例,如前所解说,可以各种方式加以训练:初始模型参数(I)可随机选择、(II)可从已执行相似目标的ML模型导入、和/或(III)可事先以非监督方式学习到。
关于(I):若模型参数的初始数值随机选择,则相同随机分布或不同随机分布可针对ML模型的两个输入分支来选择。
关于(II):若具有与训练中的ML模型的两个输入分支相同或相似架构的其他ML模型已被使用,则其模型参数可用作训练阶段的初始模型参数。因此,用于训练程序的模型参数的初始数值可针对ML模型的两个单独输入分支单独设定。ML模型的训练过程可通过模块化决定初始模型参数来简化。
关于(III):若ML模型的两个输入分支实施为自动编码器,即输入分支的输入数据可在其输出处再生成,例如若输入分支以编码器-解码器架构的形式实现的情况,则从输入数据的再生成决定的模型参数可用作ML模型的起始参数。因此,训练的两个输入分支的模型参数通常有助于在训练阶段中初始化整个ML模型。
为了训练机器学习模型而供应缺陷的对应效应可更包含下列步骤:将用于训练目的的图像与用于生成对应于该图像的缺陷的至少一个效应的参考图像叠加(overlaying)。
提供为了训练机器学习模型的缺陷的对应效应可更包含下列步骤:通过下列方式决定参考图像:成像光刻工艺中的元件的实质上无缺陷区域,其具有与测量的图像的区域相同的图案元件,和/或模拟用于光刻工艺中的元件的测量的图像的区域的设计数据。提供为了训练机器学习模型的缺陷的对应效应可更包含下列步骤:通过下列方式决定参考空间像:成像光刻掩模中的实质上无缺陷区域,其具有与测量的空间像的区域相同的图案元件,和/或模拟用于光刻掩模的测量的空间像的区域的设计数据。
将图像与参考图像叠加可包含:形成图像与参考图像之间的差异。此外,将空间像与参考空间像叠加可包含:形成空间像与参考空间像之间的差异。
形成差异可包含来自下列组的至少一个元素:决定关键尺寸(CD)的偏差、决定对比度偏差,以及决定一个或多个图案元件的设置偏差。
通常,测量的图像(就像参考图像)会以二维像素配置的形式呈现。每个像素通常与某个位元深度相关联,使得该位元深度可表示为灰阶值阶梯(steps)。例示缺陷的效应的差异图像通过叠加参考空间像和空间像产生。
光刻工艺(例如光掩模)的元件的缺陷的效应可被捕获在缺陷效应图中。缺陷效应图说明测量的图像相对于参考图像的偏差的效应,如上文所解说。举例来说,可印出缺陷(即在掩模或掩模部位上的晶片上可见的缺陷)的配置随后可通过预定一个或多个临界值条件,直接从缺陷效应图确定。而且,除了缺陷的预测的效应以外,ML模型可被训练以另外预测可印出缺陷是否可校正。
该训练可更包括下列步骤:将通过从用于训练目的的图像训练中的机器学习模型决定的缺陷的至少一个效应与对应于用于训练目的的图像的缺陷的至少一个效应进行比较。
训练机器学习模型可包含监督的学习。监督的学习被描述在C.M,Bishop所著作的书籍“模式识别与机器学习(Pattern Recognition and Machine Learning)(Springer2006,ISBN-10:0-387-31073-8)”中。
训练机器学习模型可包含:(a)在第一阶段中,使用第一数量的模拟的图像、与具有缺陷的对应效应的模拟的图像有关联的设计数据训练机器学习模型;以及(b)在第二阶段中,使用第二数量的测量的图像、与具有缺陷的对应效应的测量的图像有关联的设计数据训练机器学习模型,其中该第一阶段在该第二阶段之前执行。第一数量的模拟的图像可大于第二数量的测量的图像。第一数量的模拟的图像可大第二数量的测量的图像10倍。
训练机器学习模型可更包含下列步骤:进行前述步骤(a)和(b)至少两次。
测量大量图像(例如训练ML模型所需的空间像),例如数千幅图像,可能很复杂。根据本发明的方法使得可在第一步骤中基于模拟的图像和相关联设计数据训练ML模型。模拟的图像可借助于模拟工具大量生成。在第二步骤中,借助模拟的图像事先训练的ML模型最后借助于有限数量的测量的图像准备供其使用。
一种可包含在通过计算机系统执行时提示该计算机系统执行以上所明确说明的各方面的方法步骤的指令的计算机程序。
根据本发明的进一步方面,以上所明确说明的问题通过权利要求18的装置解决。
一种决定光刻工艺中的元件的缺陷的至少一个未知效应的装置可包含:(a)提供构件,用于针对图像、有关该图像的设计数据、以及由该图像产生的缺陷的至少一个效应之间的关系提供机器学习模型;(b)训练构件,用于使用用于训练目的的大量图像、有关用于训练目的的图像的设计数据、以及缺陷的对应效应来训练机器学习模型;以及(c)决定构件,用于通过将训练的机器学习模型应用于测量的图像以及有关测量的图像的设计数据来决定缺陷的至少一个未知效应。
该装置可包含用于光刻工艺中的元件的曝光系统以及放大透镜,其实施成在光检测器上成像光刻工艺中的元件的部位。该装置可包含AIMS
附图说明
下列详细描述参考附图说明本发明的目前较佳示例性实施例,在图中:
图1示意性显示目前时常所使用评估光刻工艺中的元件的品质的工作流程;
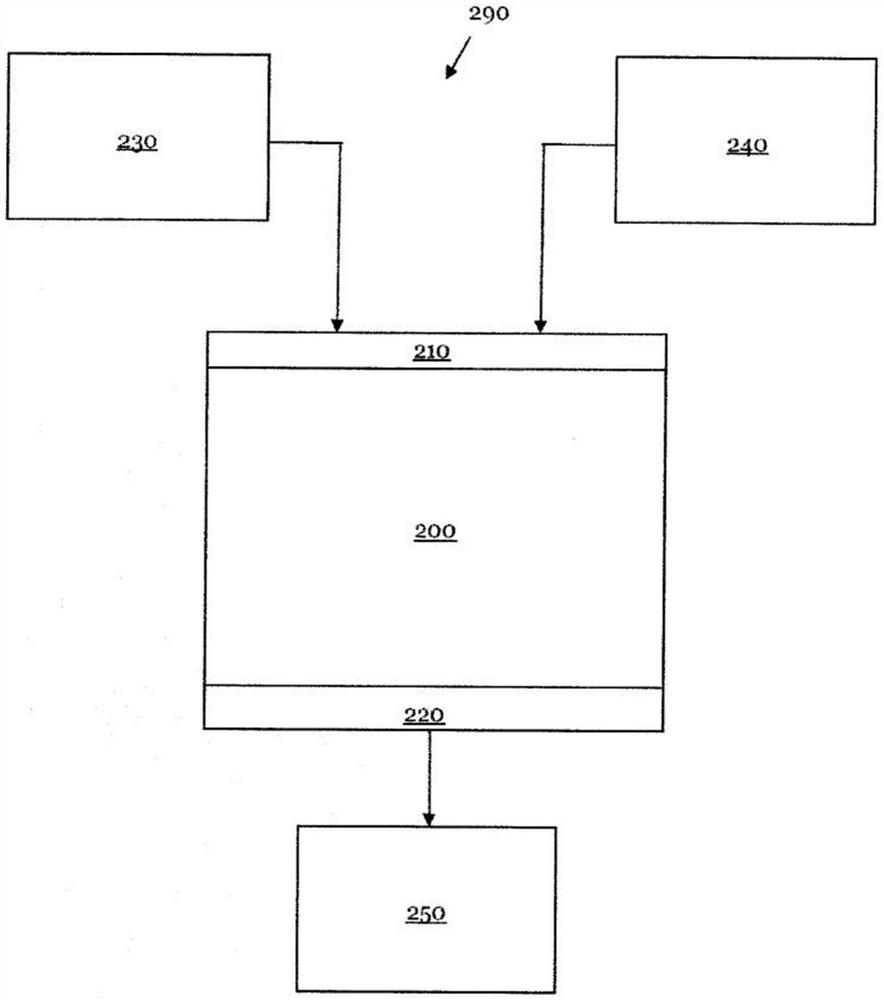
图2示意性显示具有输入层、输出层、以及相关联输入数据和输出数据的机器学习模型的示例;
图3示意性例示具有两个单独输入分支的机器学习模型的第二示例的剖面图;
图4示意性显示通过其可实现本申请中所述方法的装置的剖面图;
图5示意性例示光刻工艺中的元件的部位的参考空间像;
图6示意性显示光刻工艺中的元件的部位的空间像。
图7示意性呈现缺陷机率图的部位;
图8示意性阐明机器学习模型的训练阶段的训练周期;
图9示意性显示评估光刻工艺中的元件的品质的工作流程(在训练的模型为此目的而使用时),所述训练的模型在测量的空间像与相关联设计数据之间建立关系,因此促成预测光刻工艺中的元件的缺陷分布;以及
图10最后例示决定光刻工艺中的元件的缺陷的未知配置的方法的流程图。
具体实施方式
根据本发明的方法及根据本发明的装置的目前较佳实施例是基于决定光刻掩模的缺陷的未知效应而得到更详细解说。然而,应用根据本发明的方法及根据本发明的装置不限于光掩模。而是,所述装置与方法可应用于光刻工艺中的其它元件,例如可用于取代光掩模的纳米压印光刻术中的模板或模具。此外,根据本发明的方法及根据本发明的装置可用于在处理晶片期间评估其品质。一般来说,本申请中所述方法可用于评估设计数据呈现且缺陷可成像的对象的品质。
图1示意性显示目前较佳所使用的评估光掩模的品质的工作流程。目前时常所使用的确定光刻掩模的缺陷效应图的方法提供决定要在第一步骤中检查的掩模区域的参考空间像。若掩模包含含有与图案元件相同的配置的许多区域或部分区、或至少其多个区域或区,则掩模的无缺陷区域可被选择以记录参考空间像。为了测量空间像之目的,因此还为了测量参考空间像,可使用例如用于决定设置误差的AIMS
在半导体与微系统技术中,用于关键尺寸的术语“CD”表示测试结构中所定义的大小,其测量允许关于工艺步骤的制造品质做出陈述。
若具有图案元件的等同配置的区域或部分区未在掩模上重复,或仅以很长的间隔重复,则前述用于决定参考空间像的方法(所谓的裸芯对裸芯方法)无法使用,或只能在花费更大的情况下使用,即在相对较长的时间搜寻合适参考位置之后。可为了产生参考空间像的目的而在这种情况下(但也与其无关)使用的方法是所谓的裸芯对数据库方法,其中参考空间像借助来自设计数据(例如来自布局数据)的光学成像模拟(渲染)得到。
掩模的理想参考空间像借助于从头开始或严密模拟计算出。从头开始模拟考虑光学成像系统的照射辐射(即入射于光掩模上的电磁波)与光掩模的结构的光学交互作用(散射、衍射、吸收、反射),以及后续基于麦克斯韦方程式以数值严密方式将掩模上游或下游所透射和/或所反射电磁场传播到光学分析系统的检测器平面中。这意味着麦克斯韦方程式通过合适数值方法针对相应边界条件在三个维度上求解。这代表特别的挑战,特别是对于其结构或图案由于光掩模的不同材料而出现三维照射辐射的掩模而言。
假设掩模结构是二维的且衍射波自由传播的简化模型称为“基尔霍夫模型”或“标量成像模型”。基于该基尔霍夫模型模拟参考空间像更快速几个数量级;然而,无法足够准确成像所有掩模效应。
在决定参考空间像(通过模拟或通过测量无缺陷掩模部位)之后,光掩模或一般来说光刻工艺中的元件的要分析区域的空间像在第二步骤中被测量。再者,如以上所明确说明,此测量可借助于例如前述工具之一来实施。
因此,例如相应图案元件的位置或CD数据是在第三步骤中从两个图像(即测量的空间像和参考空间像)提取的。
其后,缺陷效应图通过比较从两个图像提取的两个数据记录,针对要检查的区域或针对光掩模的整个活性(active)表面在第四步骤中建立。在本说明书中,比较提取自两个图像的两个数据记录可通过形成差异来实施。
最后,必要时,所述缺陷(例如可印出缺陷)的效应可基于一个或多个临界值(图1未例示)从缺陷效应图在掩模的一部位中或在整个掩模上方确定。
图2中的示图290示意性显示机器学习模型200或ML模型200,其例示空间像230、有关空间像230的设计数据240、以及从空间像230呈现的光刻工艺中的元件的缺陷的一个或多个效应250之间的关系。ML模型200可包含人工神经网路(ANN)。该ANN可包含深度神经网路。将机器学习模型200拟合到所需预测准确度是有利的。举例来说,拟合ML模型200可通过适当选择层数目来实施。替代地或额外地,将ML模型200的函数说明拟合成要达成的目的(具体而言,缺陷的一个或多个效应250的预测)或光刻掩模的缺陷效应图250将会更具优势。
ML模型200具有输入层210。输入数据230、240在操作期间经由输入层210提供给训练的ML模型200。在本说明书所述应用中,操作期间的输入数据230、240首先是测量的图像或空间像230,其次是与测量的图像或空间像230关联的设计数据240。举例来说,设计数据240可为掩模的布局数据或计算机辅助设计(CAD)数据,并可能例如以像素数据的形式或例如作为多边形或多边形链呈现。若设计数据作为多边形可用,则有必要将多边形链转换为像素数据。
此外,ML模型200具有输出层220,通过该输出层220,训练的机器学习模型200在输出处提供其输出数据250(具体而言,缺陷效应图250)。在图2所例示示例中,这是光刻掩模或掩模的一部位中的一个或多个缺陷的(一个或多个)效应250的预测。
图3中的示图390示意性显示机器学习模型300,其架构具体而言适合于要达成的目的。图3的示例性ML模型300包括具有六个层310、320、330、340、350、360的第一输入分支380,其中第一层310配置成输入层,通过该输入层将空间像230提供给ML模型300。ML模型300的第一输入分支380的各层310至360事先处理空间像230,使得第一输入分支380的输出可提供作为ML模型300的主要部分370的第一共同层375的输入。
此外,在图3中以示例性方式例示的ML模型300具有含有四个层315、325、335、345的第二输入分支385。以类似于第一输入分支380的方式,第二输入分支385的第一层315实施为用来将设计数据240提供给ML模型300的输入层。ML模型300的第二输入分支385的层315至345处理设计数据240,使得第二输入分支385的输出可提供作为ML模型300的主要部分370的第一共同层375的输入(平行于第一输入分支380的输入)。就像ML模型200,ML模型300经由主要部分370的输出层395输出其输出数据250(具体而言,缺陷效应图250)。
在ML模型200、300可用于预测目的之前,必须使用尽可能全面性的数据记录进行训练。图4示意性显示通过可用于测量空间像230的装置490的剖面图。此外,装置490可用于测量用作用于训练ML模型200、300的训练数据记录的一部分的空间像。
装置490包含计算机系统400,其通过一连接410链接到测量设备420。连接410可以有线或无线方式实施。在图4中所例示示例中,测量设备420借助交互作用430检查光刻掩模450。掩模450可为透射或反射掩模。图4的光掩模450是光刻工艺中的元件450的示例。测量设备420可为成像测量设备420。举例来说,测量设备420可为AIMS
除了借助光子交互作用分析掩模450并生成空间像230的光学测量设备420以外,然而,测量设备420还可借助于中性或带电部分射束而与掩模450交互作用430,并可基于所反射和/或所透射中性和/或带电粒子产生样本(即光刻掩模450)的图像。测量设备420可包含扫描电子显微镜,特别是若光刻工艺中的元件描述晶片(图4中未显示)。
然而,测量设备420还可包含扫描探针显微镜,其探测掩模450的表面,因此,生成掩模450或更普遍光刻工艺中的元件450的表面轮廓的图像(图4未例示)。举例来说,扫描探针显微镜可包含扫描力显微镜。而且,测量设备420可包含成像测量设备,以及附加地包含例如扫描探针显微镜。掩模450的三维图像可基于成像测量设备和扫描探针显微镜的测量数据生成。
计算机系统400通过连接410控制测量设备420。此外,计算机系统400通过连接410接收测量设备420的测量数据。图4的计算机系统400可从测量设备420的测量数据生成空间像230。此外,在图4中所例示示例中,计算机系统400包含ML模型200、300。计算机系统400设计成执行训练的ML模型200、300。此外,计算机系统400配置成使其可实现下文所述的ML模型200、300的训练。图形处理器(Graphical processor unit,GPU)特别适合用于执行机器学习模型200、300。因此,有利的是若计算机系统400含有一个或多个有能力的图形处理器或另一目标最佳化计算机硬体,例如谷歌(Google)的张量处理单元(Tensor processingunit,TPU)(图4未例示)。
此外,计算机系统400包含一介面460。计算机系统400可经由介面460接收属于掩模450的设计数据240或布局数据240(通过测量设备420进行分析)。介面460可为内联网(intranet)或互联网(the Internet)的无线或有线通讯介面。此外,介面460可包含数据媒介驱动装置(drive)。
是下面基于图5至图8以示例性方式解说图2和图3的ML模型200、300的训练。ML模型200、300可借助于图4的装置490加以训练。然而,为了执行训练ML模型200、300的目的,还可能将具体而言为此目的所设计的计算机系统、输入数据230、240、以及所提供的对应输出数据提供给所述计算机系统。
图5示意性显示用于光刻掩模450的一部位的参考空间像500的平面图。以示例性方式在图5中所例示的参考空间像500呈现具有四个条纹510、520、530、540的垂直条纹结构,其具有吸收光刻掩模450的光化波长的材料。图5中的参考空间像500的条纹结构实质上没有缺陷。在本说明书,类似在本发明申请的其它点处,表达“实质上(substantially)”意味着,若使用根据用于测量的现有技术的测量设备,则相对于预定设计没有可检测的改变的测量。
举例来说,图5的参考空间像500可通过装置490的测量设备420来测量。为此目的,选择掩模450上的位置,其包含在图5中再生成的条纹结构510、520、530、540,且其已知为掩模450没有缺陷的位置。
然而,若掩模450在要检查的掩模450的区域附近没有无缺陷条纹结构510、520、530、540,或是若参考空间像500中再生成的条纹结构仅在光掩模450上呈现一次,则参考空间像500可借助于模拟工具从对应于参考空间像500的掩模450的设计数据240生成。如前所解说,用于产生参考空间像500的模拟可基于通过麦克斯韦方程式针对通过参考空间像500再生成的光掩模450的部位的数值解的设计数据240的严密或从头开始模拟进行。执行严密模拟提供高度精确参考空间像500;然而,这通常是耗时的程序。
因此基于所谓的“基尔霍夫模型”或“标量成像模型”实施参考空间像500可为替代例,此取决于参考空间像500所需准确度而定。相较于严密模拟,此模拟程序需要显著更少的花费。
图6显示用于如图5中的掩模450的相同部位的光掩模450的测量的空间像600。在图6所例示示例中,条纹520具有缺失吸收体材料的缺陷650。而且,第三条纹530在测量的示例性空间像600中具有过量吸收材料的缺陷660。测量的空间像600可为训练数据记录的一部分。然而,测量的空间像600还可为了预测缺陷650、660的效应250的目的而与相关联设计数据240一起被输入训练的ML模型200、300中。最后,借助于模拟工具基于修改的设计数据产生的训练数据记录的模拟的空间像可非常相似于测量的空间像600。
图7呈现缺陷效应图700的特殊表现形式的一部位710。缺陷效应图700的部位710通过将参考空间像500与测量的空间像600进行比较形成。详细来说,缺陷效应图700的部位710可通过形成参考空间像500与测量的空间像600之间的差异形成。如前所解说,该差异图像基于参考空间像500和测量的空间像600的灰阶值实施。由于该差异图像具有比参考空间像500和测量的空间像600更高的位元深度,因此缺失吸收体材料650和过量吸收体材料660的缺陷650、660可在缺陷效应图700的部位710中区别开。凭借在整个掩模450上方或在掩模450的所有相关区域上方所决定的缺陷效应图700的部位710,可针对光刻掩模450或通常针对光刻工艺中的元件450产生缺陷效应图700。缺陷效应图700的部位710可并入用于ML模型200、300的训练数据记录中,作为缺陷650、660的对应效应。
对于在训练程序中决定ML模型200、300的内部模型参数,取得足够的一致性和代表性训练数据很重要。图8示意性显示用于ML模型800的训练周期的示例。在设计方面及就函数特性化而言,图8的模型800与图2和图3的ML模型200、300相同。然而,不像ML模型200、300,ML模型800尚未被训练。在图8所例示示例中,测量的空间像600和相关联设计数据240作为训练序列的输入数据被提供给机器学习模型800的输入层210。在其输出层220处,训练中的ML模型800从这些输入数据预测具有缺陷850和860的缺陷效应图的部位810。将缺陷效应图的部位810与图7的缺陷效应图700的部位710进行比较。在图8中,该比较通过双头箭头870表示。
有各种方法决定训练阶段期间ML模型800的模型参数,此取决于所选择ML模型800而定。举例来说,“随机梯度下降法(stochastic gradient descent)”迭代技术或对应变化例已针对以深度神经网路形式可用的ML模型800建立。在此训练方法中,训练数据(即用于训练目的的空间像830,例如测量的空间像600和相关联设计数据240)对模型800重复呈现,即后者使用现有模型参数计算缺陷效应图的部位810,并将计算的部位810与缺陷效应图700的测量的部位710进行比较。ML模型800的模型参数在两个部位710与810之间的偏差的情况下被修改。通常,针对输入数据记录的训练阶段会在部位810已到达(局部)最佳时终止,意味着部位710与810之间的偏差在所有成对的图像上方,或在预定时间间隔已到期或预定训练步骤数量已进行之后几乎不再改变。或者,ML模型800的训练程序可在验证准确度在使用单独验证数据记录而显著提高时完成,这表示ML模型800过度拟合(overfitting)。
模型800可采取两个步骤加以训练。在第一步骤中,形式为用于训练目的的模拟的空间像的空间像830可与相关联设计数据240一起被提供给模型800的输入层210。在第二步骤中,测量的空间像600后续与对应设计数据240一起被提供给模型800作为用于训练目的的空间像830。
在使用训练的ML模型200、300之前,训练的ML模型200、300的预测能力可借助于验证步骤加以分析。在验证训练的ML模型200、300时,预测训练的ML模型200、300的精确度是基于独立验证数据记录来分析的。
图9的示图900显示若在该程序中使用训练的ML模型200、300而非比较参考空间像500与测量的空间像600,用于评估光刻工艺中的元件450的品质的工作流程。最初,光刻掩模450的空间像600在步骤910进行测量。因此,属于测量的空间像600的设计数据240在步骤920提供给训练的机器学习模型200、300。训练的ML模型200、300基于测量的空间像600和相关联设计数据240,在步骤930中直接确定空间像600的缺陷650、660的效应250。在图9中所示工作流程避免决定参考空间像500。
最后,图10的流程图1000呈现决定光刻工艺中的元件450的缺陷650、660的至少一个未知效应的方法的工作流程。该方法是从步骤1010开始。在步骤1020,针对空间像600、有关空间像600的设计数据240、以及由空间像600产生的光刻工艺中的元件450的缺陷650、660的效应之间的关系,提供机器学习模型200、300。
在下一步骤1030,机器学习模型200、300使用用于训练目的的大量空间像830、有关用于训练目的的空间像830的设计数据240、以及缺陷650、660的对应效应250来训练。
因此,在步骤1040,缺陷650、660的未知效应通过将训练的ML模型200、300应用于测量的空间像600及有关测量的空间像600的设计数据240来决定。最后,该方法在步骤1050结束。