保持区域和在保持区域执行的方法
文献发布时间:2023-06-19 09:24:30
技术领域
该文献公开了一种方法和包括系统的保持区域。更具体地,所述保持区域布置在农场的挤奶厅处,其中,系统布置在所述保持区域处,并且被配置为监测动物在至少两个方向上的运动。
背景技术
在从动物中提取乳汁的农业环境中,例如在奶牛场中,可以在允许动物进入挤奶厅之前将动物保留在保持区域中,在挤奶厅处提取乳汁。
动物可具有朝向挤奶室的行走顺序,这可能与畜群中动物的挤奶顺序不同;或者只是以任意顺序到达保持区域。动物可能需要在保持区域花费一些短暂的时间以准备好挤奶,并对用于进入挤奶厅的位置进行分类。但是,不希望动物在保持区域中停留太长时间。
保持区域通常具有水泥地板,通常没有允许动物躺下休息的任何舒适感。此外,保持区域通常没有水或饲料。由于这些原因,在保持区域花费的时间过长对动物来说是不健康的,并且可能影响动物的产奶量。另外,动物的健康可能受到影响,例如,由于必须在水泥地上站得太久。因此,希望避免任何动物在保持区域中停留太长时间。
保持区域有时可以但不必须具有可移动的赶牛门,以鼓励动物在保持区域内朝挤奶厅移动以便进行挤奶。这样可以缩短任何动物留在保持区域的时间;但是,赶牛门不能过快移动,因为它可能会给动物造成压力和/或伤害。
而且,动物是社交产物,彼此互动并以不同的方式相互影响。动物会因日常生活中的不同偏离而单独做出反应,例如农场的新员工。有些动物可能会变得非常受压力和沮丧,而另一些动物似乎根本没有引起任何注意。
动物之间的社交互动包括畜群动物之间的内部排名,以及该排名的持续坚持。这意味着较早进入保持区域的低排名动物可能会被其他动物超过,从而延长了低排名动物在允许进入挤奶厅并挤奶之前的等待时间。在更坏的情况下,低排名动物用于无法进入挤奶厅,因为其他更具优势的动物在其面前潜行。因此,低排名动物的乳汁提取受到影响。如果不及时挤奶,动物可能会出现产奶问题,其可能会下降。
由于这些原因,期望找到一种方法来确定没有动物必须在等待区域停留太长时间,因为可能会影响牛奶的产量以及动物的健康。
农场中的另一个可能的问题是识别异常动物,例如生病或受伤的动物或高温动物。为此目的进行了多种尝试,例如基于对乳汁产量,活性,反刍力,乳汁成分,激素等的测量和分析。但是,它们都有其局限性和/或缺点。出于这个原因,可能希望找到另一种方法来由于其古怪的行为而识别异常动物,该另一种方法被单独使用,或者与其他测量方法结合使用,并找到一种方式来确定她没有在保持区域的停留太长时间。
在一些农场中,尤其是基于动物内部的排名,将动物分为不同的挤奶组,以避免上述低排名动物被其他动物阻止进入挤奶厅的情况。
传统上,农民根据观察和经验,将来自不同挤奶组的低排名动物分类并放入单独的低排名动物组。然而,由于农民还承担其他艰巨的任务,因此希望找到一种减少农民劳动的方式,例如通过简化动物的排名和分类。
发明内容
因此,本发明的目的是解决上述问题中的至少一些,并改善农场中动物的挤奶过程。
根据本发明的第一方面,该目的通过布置在农场的挤奶厅处的保持区域来实现,其中,实时定位系统(RTLS:Real-Time Location System)布置在该保持区域。RTLS配置为监测至少两个方向上的动物运动。RTLS包括控制单元。此外,RTLS包括与动物相关联的标签。另外,RTLS还包括至少三个收发器,其被配置为检测由标签发射的信号,并与控制单元通信信息。控制单元被配置为经由标签确定动物到达保持区域的时间和/或经由标签确定动物的运动。而且,控制单元被配置为通过动物的标签识别动物。此外,控制单元被配置成在动物停留在保持区域中时监测自动物到达保持区域以来经过的等待时间和/或动物在至少两个方向上的运动。另外,控制单元被配置为将监测的等待时间和/或动物运动与相应的参考阈值进行比较。控制单元还被配置为在所监测的等待时间或动物运动超过相应的参考阈值时触发动作。
在根据第一方面的保持区域的第一实施方式中,控制单元被配置为:通过标签的三维(3D)加速度计来监测动物在停留在保持区域中时的行为;将监测到的动物行为存储在数据库中;分析监测到的动物行为;并基于分析的动物行为,在动物接近保持区域时主动触发动作。
在根据第一方面的保持区域的第二实施方式或其第一实施方式中,控制单元被配置为针对除所识别的动物以外的其他动物触发禁止通过进入挤奶厅的入口的动作。
在根据第一方面的保持区域的第三实施方式或其任何实施方式中,控制单元被配置为针对除所识别的动物以外的其他动物触发禁止通过进入保持区域的入口的动作。
在根据第一方面的保持区域的第四实施方式或其任何实施方式中,控制单元被配置为触发通知农场的农民的动作。
在根据第一方面的保持区域的第五实施方式或其任何实施方式中,控制单元被配置为确定所识别的动物离开保持区域通过进行挤奶厅的入口的时刻。此外,控制单元被配置为计算所确定的动物到达保持区域的时间与所确定的动物离开保持区域的时间之间的时间差。控制单元还被配置为基于所计算的时间差对所识别的动物进行排名。
在根据第一方面的保持区域的第六实施方式或其任何实施方式中,控制单元被配置为当监测到的等待时间超过参考时间限制时将动物分类为低排名。
在根据第一方面的保持区域的第七实施方式或其任何实施方式中,控制单元被配置为命令门在低排名动物接近时向低排名动物组的区域开放,从而迫使低排名动物来改变动物组。
根据本发明的第二方面,该目的通过一种在布置在农场的挤奶厅处的保持区域中执行的方法来实现。RTLS布置在保持区域处,并且被配置为监测动物在至少两个方向上的运动。RTLS包括控制单元。此外,RTLS还包括与动物相关联的标签。另外,RTLS包括至少三个收发器。收发器被配置为检测标签发出的信号,并与控制单元通信信息。该方法包括以下步骤:通过标签确定动物到达保持区域的时间和/或通过标签确定动物的运动。该方法还包括通过动物的标签识别动物。此外,该方法包括在动物停留在保持区域中时监测自动物到达保持区域以来经过的等待时间和/或动物在至少两个方向上的动物运动。该方法另外包括将监测到的等待时间和/或动物运动与相应的参考阈值进行比较。另外,该方法还包括当监测到的等待时间和/或动物运动超过相应的参考阈值时触发动作。
在根据第二方面的方法的第一实施方式中,该方法包括经由标签中的3D加速度计来监测动物在停留在等待区域中时的行为。此外,该方法还包括将所监测到的动物行为存储在数据库中。该方法另外包括分析监测到的动物行为。而且,该方法包括基于所分析的动物行为,在动物接近保持区域时主动触发动作。
在根据第二方面的方法的第二实施方式或其第一实施方式中,该方法还包括针对除了所识别的动物以外的其他动物触发禁止通过进入挤奶厅的入口的动作。
在根据第二方面的方法的第三实施方式或其任何实施方式中,该方法包括针对其他动物触发禁止通过进入保持区域的入口的动作。
在根据第二方面的方法的第四实施方式或其任何实施方式中,该方法还包括触发通知农场的农民的动作。
在根据第二方面的方法的第五实施方式或其任何实施方式中,该方法还包括确定动物离开保持区域通过进入挤奶厅的入口的时刻。此外,该方法还包括计算所确定的动物到达保持区域的时间与所确定的动物离开保持区域的时间之间的时间差。该方法还包括基于所计算的时间差对所识别的动物进行排名。
在根据第二方面的方法的第六实施方式或其任何实施方式中,该方法还包括当监测到的等待时间超过参考时间限制时将动物分类为低排名。
在根据第二方面的方法的第七实施方式或其任何实施方式中,该方法还包括命令门在低排名动物接近时向低排名动物组的区域开放,从而迫使低排名动物来改变动物组。
根据本发明的第三方面,该目的通过一种计算机程序来实现,该计算机程序包括指令,当该计算机程序由根据第一方面或其任何实施方式的控制单元执行时,指令使控制单元执行根据第二方面或其任何实施方式的方法。
得益于所描述的方面,通过确定动物在保持区域内的时间和/或运动并将其与阈值极限进行比较,可以触发适当的动作以促进动物通过保持区域向挤奶厅的平稳过渡。因此,可以避免动物在保持区域中的滞留,从而导致农场中的动物更健康,并且乳汁产量增加。
从随后的详细描述中,其他优点和其他新颖特征将变得显而易见。
附图说明
现在将参考附图进一步详细描述本发明的实施例,在附图中:
图1A示出了根据本发明实施例的挤奶厅和等候区域的示例。
图1B示出了根据本发明实施例的挤奶厅和等候区域的示例。
图2示出了根据本发明实施例的实时定位系统的示例。
图3示出了根据本发明实施例的实时定位系统的示例。
图4示出了根据本发明实施例的挤奶厅、等候区域和分类机构的又一示例。
图5A是示出根据本发明的实施例的方法的第一部分的流程图。
图5B是示出根据本发明的实施例的方法的第二部分的流程图。
图6是描绘根据实施例的系统的图示。
具体实施方式
在此描述的本发明的实施例被定义为可以在以下描述的实施例中付诸实践的方法和保持区域。然而,这些实施例可以以许多不同的形式被示例和实现,并且不限于在此阐述的示例;相反,提供了实施例的这些说明性示例,使得本公开将是彻底和完整的。
根据结合附图考虑的以下详细描述,其他目的和特征将变得显而易见。然而,应该理解,附图仅是出于说明的目的而设计的,而不是作为对本文公开的实施例的限制的定义,对本文公开的实施例的限制的定义将参考所附权利要求书。此外,附图不一定按比例绘制,并且除非另外指出,否则它们仅旨在概念性地示出本文所述的结构和过程。
图1A示出了从上面的角度来看的农场的示意性场景。农场包括保持区域110和相邻的挤奶厅120,在它们之间有一个入口115。保持区域110,有时也被称为等待区域、保持栏等,用于保持等待挤奶的动物100、101、102。
允许保持区域外部的动物101通过入口105进入保持区域110。在一些实施例中,可以允许预定数量的动物100、101、102进入保持区域110,在此之后,可以关闭进入保持区域110的入口105。
“动物”可以是任何任意类型的驯化雌性产奶动物,例如牛,山羊,绵羊,骆驼,水牛,牦牛等
挤奶厅120可以包括立柱,挤奶机器人,旋转挤奶平台等。图1B示出了保持区域110和相邻的挤奶厅120,其中挤奶厅120包括挤奶机器人130。
在一些实施例中,保持区域110的尺寸可以借助于可移动的群体用门140来调节,该群体用门被布置成可朝向和远离挤奶厅120的入口115移动。当群体用门140朝向挤奶厅120的入口115移动时,动物100、102所占据的保持区域110的尺寸减小,从而促使动物100、102进入挤奶厅120。
图2示意性地示出了根据一个实施例的从上面的角度来看的保持区域110和实时定位系统(RTLS)200。RTLS 200包括控制单元210。
在所示的实施例中,动物100具有附接到动物100的身体部分的标签220,例如,附接到动物的头100。标签220可以包括唯一地识别动物100的信息,即,诸如本地或全球唯一编号,名称和/或代码等的身份参考。
在一些实施例中,标签220还可以包括用于确定动物100的活动的装置,例如,3维(3D)加速度计,计步器,脉搏计,血压监测装置,用于确定动物100体温的温度计等。
标签220的可选3D加速度计可以执行双轴和/或三轴加速度的高频记录,从而可以区分行为模式,例如确定动物100是站立还是躺下或骑着另一只动物(例如由于发情的影响)。3D加速度计(也可以称为3轴加速度计)包括三个相互正交安装的独立内部加速度计,从而可以分析复杂加速度的独立分量。每个加速度计都是用于测量加速度力的机电装置。这样的力可以是静态的,例如连续的重力,也可以是动态的,以感测动物100的运动和/或振动。加速度是速率或速度变化除以时间的量度。例如,确定动物100在六秒钟内从静止状态加速到10km/h的加速度为每秒1.67km/h(10除以6)。
在另一个示例中,动态加速度计可以测量重力拉力以确定标签220(以及由此标签220被布置在动物100上的身体部位)相对于地球中心倾斜的角度。通过感测加速度的量,控制单元210可以分析动物100如何移动并确定例如动物100是否正在躺下或爬上另一只动物101。
标签220可以包括应答器,该应答器包括动物100的身份参考。标签220可以发射无线信号,该无线信号可以由控制单元110经由多个收发器230a、230b、230c接收,例如通常至少三个收发器230a、230b、230c。
无线信号可以通过任何便利的无线通信技术在标签220和无线信号收发器230a、230b、230c之间传输,例如超宽带(UWB),蓝牙(BT),无线通用串行总线(无线USB),射频识别(RFID),Wi-Fi等;由此可以确定动物100的位置。
控制单元210可以基于标签220发出的信号来确定动物100的位置、身份和/或活动。标签220(以及因此动物100)的定位可以例如通过在至少两个方向(例如,两个垂直方向,诸如X和Y)上的三角测量或三边测量来进行。在一些实施例中,还可以确定动物100是正在躺下还是站起来,例如基于加速度计的测量结果。此外,控制单元210可以在数据库240中跟踪动物100(位置,身份和/或活动)以及畜群的可能所有动物100、101、102,并可选地跟踪每个记录的时间戳。然后可以由控制单元210分析所收集的信息,并且可以检测各种行为模式,例如,对动物100进行排名;和/或可以检测到,当某另一只动物101、102进入保持区域110时,动物100容易受到压力;或动物100需要独自在保持区域110中才能放松并进入挤奶厅120等。
然后,可以将动物100的这些检测到的行为模式用于实施规章,规章对于畜群中的每个动物100、101、102可能是不同的。例如,在一些实施例中,当在保持区域110内检测到某只特别是敏感的动物100时,可以锁住用于其他动物101进入到保持区域110的入口105。
图3还示意性地示出了根据与图2的实施例类似的实施例的从上面的角度看的保持区域110和RTLS 200。RTLS 200包括控制单元210,其连接到收发器260或包括收发器260。
通过检测动物100何时进入保持区域110,控制单元210可以通过标签220和无线信号收发器230a、230b、230c来监测动物100。当控制单元210检测到动物100在保持区域110中停留的时间超过预定的或可配置的参考时间限制时,触发措施或动作以避免动物100在保持区域110中停留时间时间。在这种情况下,在保持区域110中停留太长时间意味着在该保持区域中停留比参考时间限制更长的时间段。这样的措施或动作的示例可以是将警报发送给农民或可能的一些其他负责人的通信装置300。表述“农民”应在广义上理解,并且可以包括与农场和/或农场上的农业活动有关或与之相关联的任何人。通信装置300可以是例如蜂窝电话,计算机装置,智能电话,智能眼镜或其他可穿戴通信装置等。替代地或附加地,通信装置300可以是单向通信设备装置,即使得能够从控制单元210到农民的通信,诸如扬声器,发光装置等。
另一措施/动作可以是禁止除了所识别的动物100之外的其他动物102通过入口115进入挤奶厅120。措施/动作的又一个示例可以是禁止除了所识别的动物100之外的其他动物101通过入口105进入保持区域110。
在一些实施例中,可通过动物100的标签220在动物100停留在保持区域110中的同时连续跟踪动物100的运动。通过确定标签220/动物100的位置,并将其与时间点相关联,可以由控制单元210确定动物100的运动模式和运动速度。具有异常运动模式的动物100可以归类为例外动物,当它们位于保持区域110中时需要进行特殊处理或措施,例如单独在保持区域110中或与不超过有限数量的其他动物101、102一起,或没有特定其他个别动物101、102。
在本文中,“例外动物”应在广义上解释。例外动物100的一些示例例如可以是受热的动物(例如,可以通过注意到运动模式的增加被检测到);怀疑生病的动物(例如,可以通过注意运动模式的减少被检测到);和/或带有故障的应答器或传感器的动物(例如,可以通过注意到不合理/不可能的传感器值被检测到)。例如,“例外动物”的其他示例可以是错误分类的动物,也可以是已知为暴力的动物。
一些其他措施/动作可以是激活或加强可移动群体用门的移动,以迫使动物100移入挤奶厅120。
图4示意性地示出了保持区域110和相邻的挤奶厅120。在该示例中,挤奶厅120包括旋转厅。
在一些实施例中,排名机制可以基于动物100已经停留在保持区域110中的时间段来自动估计动物100的排名。排名机制可包括确定动物100离开保持区域110通过挤奶厅120的入口115的时刻;以在其之后计算动物100到保持区域110的到达时间与动物100离开保持区域110的时刻之间的时间差。然后可以基于所计算的时间差对动物100进行排名。
当监测的等待时间超过参考时间限制时,动物100可以被分类为低排名。然而,在其他实施例中,可以基于所计算的时间差与参考时间限制之间的比较,建立处于不同水平的几个参考时间限制,并且可以将动物100分类为多个排名中的一个排名。
在又一些实施例中,例如与挤奶厅120的出口相关联的农场可以包括门410,该门410被构造成在接近低排名动物100时向低排名动物组的区域400开放,从而迫使低排名动物100改变动物组。
通过将低排名动物自动分类到低排名动物组中,可以节省农民的时间,而农民不必手动对动物进行排名和分类。
通过将低排名动物100放置在低排名动物组中并随后对低排名动物组中的动物100进行挤奶,可以避免动物100在保持区域110中停留太长时间,从而使她免于健康问题和乳汁产量的影响。
图5A和5B示出了根据实施例的方法500的示例。图5A/B中的流程图示出了在布置在农场的挤奶厅120处的保持区域110中执行的方法500。实时定位系统(RTLS)200被布置在保持区域110处,并且被配置为监测在大致位于同一平面中的至少两个方向(例如,X和/或Y)上的动物运动。RTLS200包括控制单元210。此外,RTLS 200还包括与动物100相关联的标签220。另外,RTLS 200包括至少三个收发器230a、230b、230c,其被配置为检测由动物100的标签220发射的信号,并通过有线或无线通信接口与控制单元210通信信息。
为了正确地执行方法500,可以包括多个方法步骤501-511。但是,这些步骤501-511中的某些步骤可以仅在一些替代实施例中执行,例如,步骤504-508和/或511。此外,所描述的步骤501-511可以以与编号所建议的时间顺序不同的顺序来执行;例如,步骤502可以在步骤501之前或同时执行。方法500可以包括以下步骤:
步骤501包括通过标签220来确定动物100到达保持区域110的时间和/或通过标签220确定动物运动。
可以通过经由收发器230a、230b、230c中的至少一个接收由标签220发出的无线信号来确定动物100的到达时间。然后,当收发器230a、230b、230c感知到标签220的无线信号时,控制单元210可以借助诸如时钟、天文钟、计时码表等的时间测量功能来确定动物100的到达时间。
步骤502包括通过动物100的标签220来识别动物100。
标签220可以例如包括在其上存储唯一身份参考的存储器,并且该唯一身份参考可以被检索并提供给控制单元210。
步骤503包括在动物100停留在保持区域110中时监测自动物100到达保持区域110以来经过的等待时间和/或动物100在至少两个方向上的动物运动。
因此,监测可以包括基于由收发器230a、230b、230c中的任何一个所感知到的由标签220发出的无线信号,确定动物100是否仍留在保持区域110中,以及来检测动物100何时离开保持区域110以进入挤奶厅120。
进一步地或可替代地,控制单元210可以监测动物100在保持区域110内的运动,例如通过在不同的时刻确定两个方向上的位置,并在确定的位置之间插入通路。由此,还可以确定动物100的速度;和/或可以计算自到达保持区域110以来的累积通过距离。
在一些实施例中,当监测503到的等待时间超过参考时间限制时,动物100可以被分类为低排名。
在一些实施例中,监测还可以或可替代地包括经由标签220中的3D加速度计监测动物100在停留在保持区域110中时的行为。由此,例如,可以确定动物100是否已经躺在保持区域110中,或者是在跳跃还是摇头。
在一些实施例中,作为方法500的可选部分的步骤504可以被执行/被视为方法500的一部分,其包括将监测到503的动物行为存储在与动物100的身份参考相关联的数据库240中。
从而,可以存储监测到503的动物行为,以供控制单元210稍后对该行为进行分析。
在某些实施例中,同样作为方法500的可选部分的步骤505可以在某些实施例中被执行/视为是方法500的一部分,其包括分析监测到503的动物行为。
可以从数据库240提取监测到503的动物行为。
也是方法500的可选部分的步骤506在一些实施例中可以被执行/被认为是方法500的一部分,其包括确定动物100离开保持区域110通过挤奶厅120的入口115时的时刻。
在检测到标签220发出的信号并确定动物100的位置之后,可以经由收发器230a、230b、230c确定动物100离开保持区域110的时刻。
在步骤506已经执行的一些实施例中,同样作为方法500的可选部分的步骤507可以被执行/被认为是方法500的一部分,该步骤507包括计算所确定501的动物100到保持区域110的到达时间与所确定506的动物100离开保持区域110时的时刻之间的时间差。
在其中已经执行了步骤507的一些实施例中,同样作为方法500的可选部分的步骤508可以被执行/被认为是方法500的一部分,该步骤508包括基于计算出507的时间差对所识别502的动物100进行排名。
由此,可以估计动物100的排名,和/或可以识别低排名动物100,而无需农民进行手动检查,从而使他/她摆脱了繁琐的工作。
步骤509包括将所监测到503的等待时间和/或动物运动与相应的参考阈值进行比较。
当将所监测到503的等待时间与其比较时,参考阈值可以包括预定的或可配置的阈值时间限制。对于不同的动物种族,不同的畜群,不同的个体动物等,阈值时间限制可能会有所不同。
参考阈值可以包括由动物100执行的预定的或可配置的阈值距离和/或活动量。
步骤510包括当所监测到的等待时间和/或动物运动超过相应的参考阈值时触发动作。
在一些实施例中,当动物100接近保持区域110时,基于分析的505动物行为,可以主动地触发动作。
在一些实施例中,所触发的动作可以包括禁止除了所识别的动物100之外的其他动物102通过进入挤奶厅120的入口115。因此,只有本文讨论的动物100可以进入挤奶厅120的入口115,而其他试图通过的动物101则被阻止进入入口115。因此,动物100可以在保持区域110中花费更少的时间,从而导致更好的健康和增加的牛奶产量。
触发动作可以可选地包括禁止其他动物101通过入口105进入保持区域110。由此,可以阻止其他动物101、102进入保持区域110,从而在保持区域110中给动物100更多的空间,并减小动物100的认知压力,这可以减少对动物100造成的压力,和在等待区域110中的更少的等待时间,从而改善了健康状况并增加了乳汁产量。
在一些实施例中,所触发的动作可以包括通知农场的农民,例如通过将警报发送到农民的通信装置300。然后,农民可以采取适当的措施以减少动物100在保持区域110中的等待时间。
在某些实施例中,可以将这些触发动作中的一些或全部组合起来,以增强效果。
在一些实施例中,作为方法500的可选部分的步骤511可以被执行/被认为是方法500的一部分,其包括命令门410在接近低排名动物100时向低排名动物组的区域400开放,从而迫使低排名动物100改变动物组。
从而,农场的动物100、101、102可以被排名并基于估计的排名被分配到动物组中,而无需农民的手动交互。这样,节省了农民的时间和工作,同时在不骚扰农民的情况下进行了动物100、101、102的排名和分类,农民反而可以专注于其他工作任务。
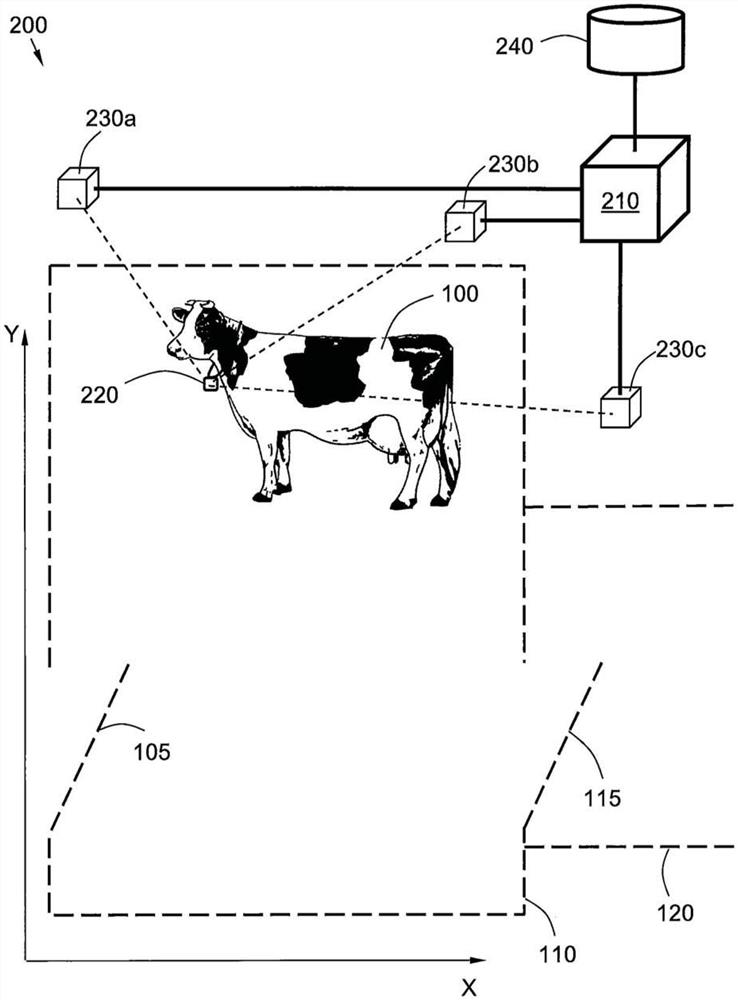
图6示出了布置在农场的挤奶厅120处的保持区域110。实时定位系统(RTLS)200被布置在保持区域110处,并且被配置为监测在至少两个方向(例如,两个垂直的方向,诸如X和Y和/或欧几里得平面中的坐标)上的动物运动。RTLS 200包括控制单元210。此外,RTLS200还包括与动物100(即特定动物100)相关联的标签220。另外,RTLS还包括至少三个收发器230a、230b、230c,其被配置为检测由标签220发射的信号,并与控制单元210通信信息。
RTLS 200可以根据上面描述的并且在图5A-5B中示出的方法500来执行先前描述的步骤501-511中的至少一些。
控制单元210被配置为经由标签220确定动物100到达保持区域110的时间和/或经由标签220确定动物的运动。此外,控制单元210被配置为通过动物100的标签220识别动物100。此外,控制单元210被配置成在动物100停留在保持区域110中时监测自动物100到达保持区域110以来经过的等待时间和/或动物100在至少两个方向上的运动。另外,控制单元210被配置为将监测的等待时间和/或动物运动与相应的参考阈值进行比较。控制单元210还被配置为在所监测到的等待时间或动物运动超过相应的参考阈值时触发动作。
在一些实施例中,控制单元210可以被配置为经由标签220的3D加速度计比较动物100在停留在保持区域110中时的监测行为。此外,控制单元210可以被配置为将监测到的动物行为存储在数据库240中。数据库240可以被包括在RTLS 200中。控制单元210还可被配置为分析所监测到的动物行为。而且,控制单元210可以被配置为当动物100接近保持区域110时,基于所分析的动物行为主动触发动作。
在一些实施例中,控制单元210可以被配置为针对除了所识别的动物100之外的其他动物102,触发禁止通过入口115进入挤奶厅120的动作。
控制单元210还可以被配置为针对除了所识别的动物100之外的其他动物101,触发禁止通过入口105进入保持区域110的动作。
另外,控制单元210可以被配置为触发通知农民的动作,例如,通过经由收发器260生成警报消息并将其发送到农民的通信装置300来进行。
此外,控制单元210可以被配置为确定所识别的动物100通过挤奶厅120的入口115离开保持区域110的时间。此外,控制单元210可以被配置为计算所确定的动物100到达保持区域110的时间与所确定的动物100离开保持区域110时的时刻之间的时间差。控制单元210还可以被配置为基于所计算的时间差对所识别的动物100进行排名。
控制单元210可以被可选地配置当监测的等待时间超过参考时间限制时,将动物100分配为低排名。
此外,控制单元210可以被配置为命令门410在接近低排名动物100时向低排名动物组的区域400开放,从而迫使低排名动物100改变动物组。
控制单元210可以包括接收器610,接收器610被配置为从无线信号接收器230a、230b、230c和/或收发器260的集合中接收信息。
控制单元210包括处理电路620,该处理电路620被配置为根据前述步骤501-511中的至少一些执行用于执行方法500的各种计算。
这种处理电路620可以包括处理电路的一个或多个实例,即中央处理单元(CPU),处理单元,处理电路,处理器,专用集成电路(ASIC),微处理器或其他可以解释和执行指令的处理逻辑。因此,本文中利用的表达“处理器”可以代表包括多个处理电路的处理电路系统,例如,以上列举的任何一个、一些或全部。
此外,在一些实施例中,控制单元210可以包括存储器625。可选的存储器625可包括用于临时或永久地存储数据或程序、即指令序列的物理装置。根据一些实施例,存储器625可以包括集成电路,该集成电路包括基于硅的晶体管。存储器625可以包括例如存储卡,闪存,USB存储器,硬盘或其他类似的易失性或非易失性存储单元,用于存储数据,例如在不同的实施例中,ROM(只读存储器),PROM(可编程只读存储器),EPROM(可擦除PROM),EEPROM(电可擦除PROM)等。
此外,控制单元210可以包括信号发送器630。信号发送器630可以被配置用于经由有线或无线通信接口将信号发送到收发器260和/或数据库240。
然而,在一些替代实施例中,RTLS 200可以包括用于根据先前描述的方法步骤501-511执行方法500的附加单元。
可以通过RTLS 200的控制单元210内的一个或多个处理电路620,以及用于执行方法步骤501-511的至少一些功能的计算机程序,来实施将在系统600中执行的上述步骤501-511。因此,计算机程序包括指令,当计算机程序由控制单元210执行时,指令使控制单元210根据步骤501-511中的至少一些来执行方法500。
可以例如以计算机可读介质的形式来提供上述计算机程序,即,载有计算机程序代码的数据载体,该计算机程序代码用于在被加载到控制单元210的一个或多个处理电路620中时执行根据一些实施例的步骤501-511中的至少一些。数据载体可以是例如硬盘,CDROM盘,存储棒,光学存储设备,磁存储设备或任何其他适当介质,例如或可以以非暂时性方式保存机器可读数据的磁盘或磁带。该计算机程序还可以在服务器上被提供为计算机程序代码,并且通过远程下载到控制单元210,例如通过Internet或Intranet连接。
如附图所示,在实施例的描述中使用的术语并不意图限制所描述的方法500;保持区域110;控制单元210;计算机程序;RTLS 200和/或计算机可读介质。在不脱离由所附权利要求限定的发明实施例的情况下,可以进行各种改变、替换和/或变更。
如本文所使用的,术语“和/或”包括相关联的列出的项目中的一个或多个中的任何和所有组合。如本文中所使用的,术语“或”将被解释为数学OR,即,包括性的析取;除非另有明确说明,否则不作为数学异或(XOR)。另外,单数形式“一个”、“一种”和“该”应解释为“至少一个”,因此,除非另有明确说明,否则还可能包括多个相同种类的实体。还应理解,术语“包括”、“具有”和/或“包含”指定了特征、动作、整数、步骤、操作、元件和/或部件的存在,但不排除一个或多个其他特征、动作、整数、步骤、操作、元件、部件和/或其组合的存在或添加。单个单元,例如处理器,可以实现权利要求中记载的几项功能。在互不相同的从属权利要求中叙述、在不同附图中示出或结合不同实施例讨论某些措施或特征的单纯事实并不表示不能有利地使用这些措施或特征的组合。计算机程序可以存储在/分布在合适的介质上,例如与其他硬件一起提供或作为其他硬件的一部分提供的光学存储介质或固态介质,但是也可以以其他形式分部,例如通过Internet或其他有线或无线通信系统。
- 保持区域和在保持区域执行的方法
- 基于知识嵌入的区域覆盖和连通保持的集群控制方法