X射线系统、图像处理装置及程序
文献发布时间:2023-06-19 09:32:16
本申请主张基于2019年7月12日提出申请的美国专利申请第16/510594号及2020年3月24日提出申请的日本专利申请第2020-053357号的优先权,在本申请中引用这些申请的全部内容。
技术领域
本说明书及附图中公开的实施方式涉及X射线系统、图像处理装置及程序。
背景技术
在X射线系统中,当使X射线管的焦点尺寸变化时,在分辨率与画质之间存在取舍关系。
例如,如果增大X射线的焦点尺寸,则X射线的通量(flux)变大,所以投影图像的画质即SNR提高,但如果增大X射线的焦点尺寸,则空间性的分辨率下降。
相对于此,如果减小X射线的焦点尺寸,则分辨率提高,但另一方面,投影图像的SNR下降,画质下降。
现有技术文献
专利文献
专利文献1:美国专利申请公开2018/0018757号说明书
专利文献2:美国专利申请公开2019/0030371号说明书
发明内容
发明要解决的课题
本说明书及附图中公开的实施方式要解决的课题之一是提高画质。但是,本说明书及附图中公开的实施方式要解决的课题并不限于上述课题。也可以将与由后述的实施方式所示的各结构带来的各效果对应的课题定位为其他的课题。
用来解决课题的手段
有关实施方式的X射线系统具备生成部。生成部对于以利用第1焦点尺寸的X射线收集到的第1投影数据为输入、以利用比上述第1焦点尺寸小的第2焦点尺寸的X射线收集到的第2投影数据或以上述第1投影数据与上述第2投影数据之间的第1差分数据为输出而进行了学习的第1已学习模型,输入利用比上述第2焦点尺寸大的第3焦点尺寸的X射线收集到的第3投影数据,从而生成第4投影数据。
附图说明
图1A是表示使用较小的焦点及比较小的X射线曝光而生成的投影图像的例子的图。
图1B是表示使用比为了得到图1A而使用的焦点大的焦点和图1A时的2倍大的曝光而生成的投影图像的例子的图。
图2是表示根据X射线源的焦点的有限宽度生成的X射线投影图像的模糊的图的图。
图3A是说明使用较大的阳极角和较小的电子束面积的实施方式的图。
图3B是说明使用较大的阳极角和较大的电子束面积的实施方式的图。
图3C是说明使用较小的阳极角和较大的电子束面积的实施方式的图。
图4是说明有关实施方式的X射线系统进行的处理的流程的图。
图5是说明有关实施方式的X射线系统进行的学习的流程的流程图。
图6是表示有关实施方式的DL网络的例子的图。
图7是说明在有关实施方式的DL网络中使用卷积神经网络(ConvolutionalNeural Network:CNN)的情况的图。
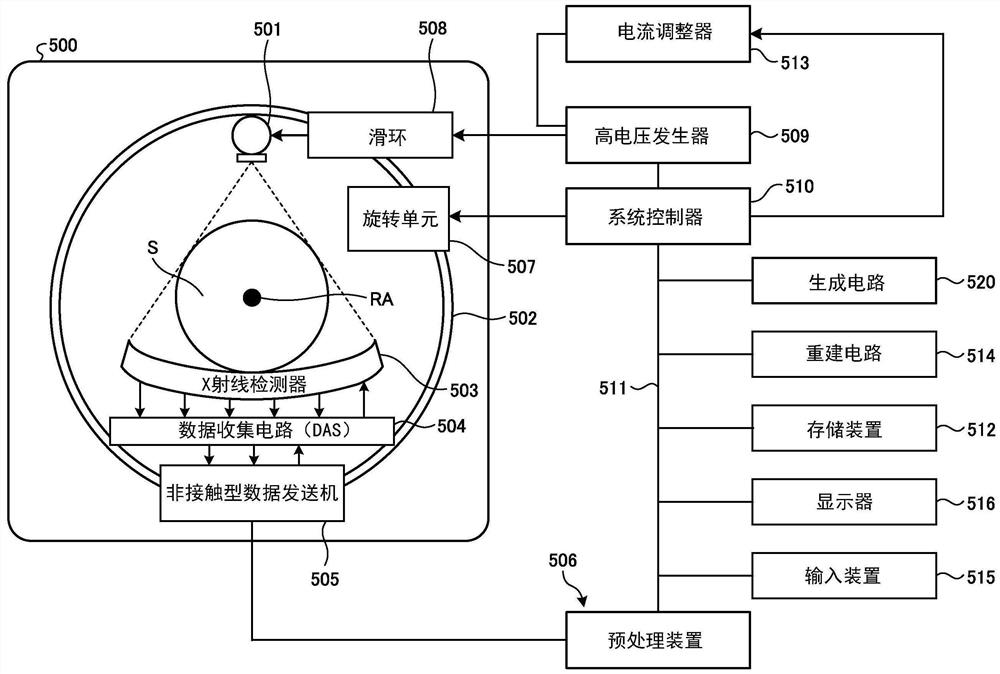
图8是表示有关实施方式的X射线CT装置的一例的图。
具体实施方式
以下,参照附图对X射线系统、图像处理装置及程序的实施方式详细地进行说明。
首先,使用图8对有关实施方式的X射线系统的结构进行说明。
图8表示有关实施方式的X射线CT装置(X射线系统)的非限定性的例子。如图8所示,X射线摄影机架(gantry)500用侧视图表示,还包括X射线管501、环状框架502及多列或二维阵列型的X射线检测器503。X射线管501及X射线检测器503在可绕旋转轴RA旋转地被支承的环状框架502上,横切摄像对象S而在直径方向上安装。
多层面(multi slice)X射线CT装置还包括生成经由滑环508向X射线管501施加的管电压、使得X射线管501生成X射线的高电压发生器509。X射线朝向截面积用圆表示的摄像对象S放射。
例如,X射线管501具有比第2扫描中的平均X射线能量小的第1扫描中的平均X射线能量。因而,能够取得与不同的X射线能量对应的两个以上的扫描。X射线检测器503为了检测透过摄像对象S后的放射X射线,夹着摄像对象S配置在X射线管501的相反侧。X射线检测器503还包括各个检测器要素或单元。
X射线CT装置还包括用来处理来自X射线检测器503的检测信号的其他装置。数据收集电路或数据收集系统(Data Acquisition System:DAS)504将来自各通道(channel)的X射线检测器503的信号输出变换为电压信号,将该信号放大,再将该信号变换为数字信号。
上述的数据经由非接触型数据发送机505向收容在X射线摄影机架500的外部控制台中的预处理电路506发送。预处理电路506执行原始数据的灵敏度修正那样的一定的修正。存储装置512将其结果的数据保存,该数据也被称作即将进行重建处理之前的阶段中的投影数据。
存储装置512与生成电路520、重建电路514、输入装置515及显示器516一起经由数据/控制总线511被连接到系统控制器510。系统控制器510对电流调整器513进行控制,将电流限制为足够用来驱动该CT系统的水平。
检测器在各种各样的世代的CT扫描仪系统中相对于患者旋转及/或被固定。在实施方式中,X射线管501及X射线检测器503沿直径方向被安装在环状框架502上,并且在环状框架502绕旋转轴RA旋转时,绕摄像对象S旋转。
存储装置512能够存储表示X射线检测器503中的X射线的放射照度的测量值。进而,存储装置512能够存储用来执行方法10的专用程序。
重建电路514能够执行方法10的各种各样的步骤。进而,重建电路514根据需要能够执行体绘制处理及图像差分处理那样的重建处理前的图像处理。重建电路514是重建部的一例。
生成电路520进行通过对后述的已学习模型输入投影数据从而生成投影数据等各种各样的处理。关于生成电路520的处理在后面叙述。生成电路520是生成部的一例。
由预处理电路506执行的投影数据的重建预处理例如可以包括用于检测器校正、检测器非线性及极性效应(polar effect)的修正。
由重建电路514执行的重建后处理根据需要可以包括图像的滤波及平滑化、体绘制处理、以及图像差分处理。图像重建处理可以实施图4所示的方法10的各种各样的步骤。重建电路514能够使用存储器保存例如投影数据、重建图像、校正数据及参数、以及计算机程序。
各种各样的电路(例如,重建电路514、生成电路520及预处理电路506)可以包括能够作为单独逻辑门、面向特定用途的集成电路(Application Specific IntegratedCircuit:ASIC)、现场可编程门阵列(Field Programmable Gate Array:FPGA)或其他的复合可编程逻辑装置(Complex Programmable Logic Device:CPLD)安装的CPU(处理电路)。
FPGA或CPLD的实施可以用VHDL、Verilog或其他的硬件记述语言编码,将该代码直接保存到FPGA或CPLD内的电子存储器中,或作为单独的电子存储器保存。
进而,存储装置512可以是ROM、EPROM、EEPROM或闪存存储器那样的非易失性存储器。存储装置512既可以是静态或动态RAM那样的易失性,此外也可以为了管理电子存储器及FPGA或CPLD与存储器之间的相互作用而设置微控制器或微处理器那样的处理器。
在实施方式中,能够将重建的图像显示在显示器516上。显示器516可以是LCD显示器、CRT显示器、等离子显示器、OLED、LED或在该技术领域中已知的某种其他的显示器。
接着,对有关实施方式的背景进行说明。
由于实际的制约,作为投影成像用的X射线源所使用的X射线管的最小焦点尺寸受到限制,此外,由于该焦点尺寸的限制,在X射线摄影、计算机断层摄影、荧光透视及血管造影那样的应用中能达成的分辨率受到限制。在这些制约中,包括实用性的尺寸的限制、热传递及材料的特性、线量的制约(例如,将放射线量尽可能维持得较低)及时间的制约。
作为实际问题,如果增大焦点尺寸,则X射线的通量变大,投影图像的S/N比(SNR)变高,但作为增大焦点尺寸的代价,空间分辨率变低。
这里说明的方法及装置使用大小两者的焦点尺寸取得包括投影图像的学习数据集,接着学习神经网络,不会牺牲通过较大的焦点尺寸得到的较高的SNR,而由使用较大的焦点尺寸取得的投影图像达成较小的焦点尺寸的图像分辨率,由此,将较大的焦点尺寸及较小的焦点尺寸的最好的结果组合。
因而,在本说明书中说明的方法能够生成具有与使用较小的焦点尺寸生成的图像同样的良好的空间分辨率和使用较大的焦点尺寸生成的图像的较大的SNR这两者的投影图像。由于X射线检测器的尺寸持续地变小,所以达成良好的空间分辨率的重要性变得越来越重要。
这里,如果参照附图,则贯穿几个图,同样的标号表示相同或对应的部分,图1A及图1B表示使用不同的焦点尺寸摄影的两个投影图像。
图1A表示使用比为了取得图1B所示的X射线投影图像而使用的焦点尺寸小的焦点尺寸所取得的X射线投影图像。图1A的焦点比图1B的焦点小,图1B的X射线曝光量是图1A的情况下的2倍。在图1A中可以看到比图1B高的分辨率,但图1A为了得到该改善的分辨率而牺牲了SNR。这是因为,由于使用更小的焦点尺寸能够达成的X射线通量较少,所以在图1A中与图1B相比信号变小,SNR变低。
因而,在既有的临床系统中使用的、与检测器的极限尺寸相比有意义地较大的焦点尺寸被认为会给系统整体的分辨率带来不良影响。焦点的尺寸依存于特定的设计选择与特定的X射线摄像元件的权衡,但通常全部的X射线摄像元件的焦点,因用于更小的焦点的管负载容量的原因而是约1毫米。
理想地讲,焦点尺寸可被任意地缩小,但这不能通过X射线管的设计上的限制来达成。结果,在分辨率与画质之间存在取舍。一方面,如果增大焦点尺寸,则能够带来更大的曝光量及更大的SNR,但比这大的SNR伴随着空间分辨率下降的代价。另一方面,如果减小焦点尺寸,则空间分辨率提高,但通过该改善而伴随着曝光量变少、SNR变小的代价。
图2表示通过来自X射线源的X射线对摄像对象进行摄像的例示性的成像系统,X射线穿过摄像对象而被图像平面检测到。由X射线源的阳极上的电子束的尺寸决定焦点尺寸。实线表示从焦点的中心穿过物体的周边的X射线的轨迹。
虚线表示从焦点的端部经过摄像对象的周边的X射线的轨迹。在从线源到摄像对象的距离(Source-To-Object Distance:SOD)远比从摄像对象到图像的距离(Object-To-Imaged Distance:OID)大的情况下,倍率变小,图像平面中的点扩散函数下降。图像平面中的图像的倍率及点扩散函数有可能也通过线源的X射线滤波器/透镜(例如蝶式滤波器)的使用而受到影响。与图像分辨率及点扩散函数对应的X射线装置的几何形状和焦点尺寸之间的关系通常被充分地理解,能够使用简单的光线跟踪而模型化,所以关于它们的详细情况这里不说明。
图3A、图3B及图3C表示使电子束及/或阳极角度变大或变小之间的权衡。
在图3A中,由于阳极角较大且电子束的面积较小,所以能得到良好的视野范围(即,由于束角较大所以视野变大)、用于良好的分辨率的较小的焦点尺寸,但发生较低的电力负载(即,由于X射线通量较低,所以规定的视野角下的SNR变低,或为了补偿较低的通量率而曝光时间变长)。
在图3B中,由于阳极角较大且电子束的面积较大,所以带来良好的视野范围、成为较低的分辨率的较大的焦点尺寸,以及良好的电力负载。在图3C中,由于阳极角较小且电子束的面积较大,所以发生较窄/狭小的视野范围、成为良好的分辨率的较小的焦点尺寸、以及良好的电力负载。这些权衡也给制造成本及患者的尺寸限制那样的CT成像的其他方面带来影响。
例如,如果使用更小的有效焦点尺寸,则发生更低的电力负载或更小的视野范围。此外,这些因素限制了用来对使更微细的焦点尺寸(例如,0.4×0.5mm)、更大且更强地衰减的患者应用的实用性(例如,在较大的患者的情况下,需要如更大的束角及500mA那样进行更高的mA设定)。
进而,较大的电力负载及更小的有效焦点尺寸有可能使制造成本增加。
图4表示关于学习及使用DL网络170、执行对于X射线投影数据的数据区域的修正(例如,边沿(edge)/分辨率提高、正弦图复原、噪声除去及/或伪影(artifact)修正)的方法10的非限定性的例子的流程图。如图4所示,方法10使用DL网络170,对于将原始数据251(例如正弦图)最优地滤波的方法进行学习,接着根据滤波后的数据重建CT图像。方法10包括两个部分,即,(i)离线的学习(训练)处理150及(ii)医用成像处理100。
即,学习处理150进行DL网络170的学习,处理100使用已学习的DL网络170,在投影区域中将原始数据251滤波。
由此,生成噪声及伪影被降低后的高品质的重建图像135。在荧光透视法那样的实施方式的一例中,能够将步骤120及130省略,输出可以是被修正后的投影数据。
在实施方式的一例中,DL网络170包括卷积神经网络(CNN),这里执行一系列的卷积、批量归一化(Batch Normalization)及归一化线性单元网络层。
DL网络170使用学习(训练)处理160进行学习。在学习处理160中,使用损失函数,将DL网络170的参数反复调整/优化(例如,DL网络170的参数可以包括将网络层连接的权重系数、以及层内的节点的激活函数/势(potential))。网络参数的优化被继续直到满足停止基准(例如,停止基准可以是损失函数的值是否收敛于事前定义的阈值),产生学习后的DL网络170。
损失函数将目标数据153与对DL网络170的当前的版本应用输入数据157而生成的输出进行比较。例如,在输入数据中,可以包括使用较大的焦点尺寸而取得的投影数据,此外,在目标数据中,可以包括为了使噪声降低而使用较小的焦点尺寸及大量的平均化所取得的投影数据。
即,作为第1已学习模型的DL网络170的学习(训练),以利用第1焦点尺寸的X射线收集到的第1投影数据即输入数据157为输入、以与利用比第1焦点尺寸小的第2焦点尺寸的X射线收集到的第2投影数据即目标数据153对应的数据为输出而进行。
这里,第2投影数据是通过将例如由多个检测器检测到的数据进行平均而取得的数据,第2投影数据的信噪比例如比第1投影数据的信噪比大。
此外,作为另一例,第2投影数据也可以使用比第1投影数据小的点扩散函数而取得。
此外,作为第1投影数据的输入数据157及作为第2投影数据的目标数据153例如是正弦图(Sinogram)。
在此情况下,关于给予的CT扫描,形成输入数据的低品质(例如,焦点尺寸较大)的正弦图与对应的高品质(例如,焦点尺寸较小)的正弦图的对。用来取得关于输入数据157的低品质正弦图及关于目标数据153的高品质正弦图的扫描例如可以在体模(phantom)上执行。
如果将来自输入数据的低品质正弦图对DL网络170的当前的版本应用,则从网络生成输出,但设想这是低品质正弦图的分辨率提高了的版本(即,被滤波后的正弦图)。
DL网络170为了使来自DL网络170的被滤波后的正弦图输出与来自目标数据153的高品质正弦图之间的差最小化,通过反复调整DL网络170内的网络系数来学习。
当目标数据与来自DL网络170的输出之间的差最小化时DL网络170的学习被决定为完成。
该差是否充分最小化的问题,基于学习处理160的1个以上的规定的停止基准而被解决。如果满足基准,则该学习后的DL网络170被保存,然后能够调出而由医用成像处理100使用。
在其他的实施中,DL网络170被作为残差网络(Residual Network:ResNet)实施。即,作为第1已学习模型的DL网络170也可以使用残差网络来进行。
在此情况下,这里说明的方法可以通过将较小的焦点尺寸的正弦图与较大的焦点尺寸的正弦图之差作为能够从低品质的正弦图中直接除去的加法残差来处置,从而能够将图像滤波。该加法残差或差分图像可以考虑为较小的焦点尺寸的投影数据的高通滤波器版本。
因而,如果将低品质正弦图对神经网络应用,则网络会输出与差分图像对应的图像。接着,通过从低品质正弦图减去网络输出(噪声/伪影)而生成修正后的正弦图,能够生成修正正弦图。
在方法10中,使用损失函数,将DL网络170的网络系数(例如,卷积层及池化(pooling)层的权重及偏差(bias))反复调整,直到满足停止基准(例如,参数向规定的阈值的收敛),生成学习后的DL网络170。损失函数将作为高品质数据的目标数据153与被引用了输入数据157的当前版本的DL网络170的结果进行比较。
即,作为第1已学习模型的DL网络170的学习,是以反复调整DL网络170的权重系数、以使根据基于作为第1投影数据的输入数据157输出的输出正弦图与作为第2投影数据的目标数据153之间的不一致度而设定的损失函数最小化的方式来进行学习。
处理100通过取得原始数据251、例如通过执行CT扫描而生成一系列的视角下的CT投影(即,低品质正弦图)而被执行。例如,正弦图可以使用生成原始数据251的低线量CT扫描来执行。
这里,原始数据251是利用比第2焦点尺寸大的第3焦点尺寸的X射线而收集到的第3投影数据,所述第2焦点尺寸是作为利用第2焦点尺寸的X射线收集到的第2投影数据的目标数据153的焦点尺寸。
在处理100的步骤110中,将原始数据251通过对进行了学习的DL网络170应用原始数据251而滤波。即,生成电路520通过对作为第1已学习模型的DL网络170输入作为利用比第2焦点尺寸大的第3焦点尺寸的X射线而收集到的第3投影数据的原始数据251,生成第4投影数据。
例如,在使用残差网络进行作为第1已学习模型的DL网络170的学习的情况下,生成电路520通过从第3投影数据减去该残差网络的输出而生成第4投影数据。
另外,通常第4投影数据的分辨率比例如第3投影数据的分辨率高。
另外,第3投影数据例如也可以是荧光透视数据。
接着,DL网络170将滤波后的正弦图输出。在实施方式的一例中,DL网络170是卷积神经网络(CNN)。该CNN可以是本地的较小的尺寸的滤波器,即将下述直接生成的网络。
这里,w
在学习处理160中,为了从输入数据生成输出正弦图而使用与为了从原始数据251生成滤波后的正弦图而在步骤110中使用的处理相同的处理,接着,使用损失函数将输出正弦图与目标数据比较。
在处理100的步骤120中,根据噪声除去后的正弦图重建CT图像。即,重建电路514基于第4投影数据,重建例如作为CT图像的第1图像。
为了根据投影数据重建CT图像,可以使用包括滤波修正反投影(Filtered Back-Projection:FBP)及统计性迭代重建(Iterative Reconstruction:IR)算法的多种多样的方法。
除了FBP以外,还可以使用费尔德坎普·戴维斯·克雷斯(Feldkamp DavisKress:FDK)法、渐次近似应用重建(Adaptive Iterative Dose Reduction3D:AIDR 3D)法等的其他的分析法。与FBP重建法相比,IR法即使是被降低的放射线量也能够改善图像品质。
IR法为了找到使下式最小化的自变量p,执行无制约(或带制约)的优化。
这里,l是表示被以一系列的投影角度下摄像的投影图像的X射线强度的对数的投影数据,p是关于图像空间中的体素/体积像素(或二维的重建图像的二维像素)的X射线衰减的重建图像。关于系统矩阵A,各矩阵值a
表述||g||
函数U(p)是正则化的项,该项以施加1个以上的制约(例如,合计变动(TotalVariation:TV)最小化制约)为目的,它具有将重建的图像平滑化或噪声除去的效果的情况较多。值β是正则化参数,是将数据保真项及正则化项的相对性的贡献加权的值。
在处理100的步骤130中,执行追加的图像区域噪声除去。该步骤是可选项,在一些实施中可以省略。
即,在步骤130中,生成电路520也可以基于在步骤120中重建的第1图像,生成作为画质提高的第2图像的重建图像135。
作为噪声除去方法的例子,可以举出线性平滑化滤波器、各向异性扩散、非局部均值或非线性滤波器。线性平滑化滤波器通过使用表示低通滤波或平滑化操作的卷积内核将原来的图像卷积而将噪声除去。例如,高斯卷积内核由通过高斯函数决定的要素构成。通过该卷积,各像素的值与邻接的像素的值严密地一致。各向异性扩散通过在近似于热方程式的平滑化偏微分方程式下使图像进化,在维持锐利的边沿的同时将噪声除去。中值滤波器是非线性滤波器的例子,如果适当地设计,非线性滤波器也能够保持边沿而防止模糊。中值滤波器是带有秩条件的秩选择(Rank-Conditioned Rank-Selection:RCRS)滤波器的一例,如果应用它,则在图像中不会发生显著的模糊伪影而能够将椒盐噪声(salt andpepper noise)除去。
除此以外,在支持图像化的区域为遍及用均匀的区域间的锐利的边界划分的较大的区域的均匀性的假定的情况下,可以应用使用合计变动(TV)最小化正则化项的滤波器。TV滤波器是非线性滤波器的另一例。进而,非局部平均滤波是使用图像内的同样的块(patch)的加权平均来决定将噪声除去后的像素的例示性的方法。
另外,实施方式并不限于此,在步骤130中,生成电路520也可以使用与DL网络170不同的神经网络,根据第1图像生成画质进一步提高的作为第2图像的重建图像135,进行降噪处理。换言之,在步骤130中,生成电路520通过对基于第1图像生成比第1图像高画质的第2图像的第2已学习模型输入第1图像,生成作为第2图像的重建图像135。
另外,第2已学习模型的学习例如以低画质的图像为输入,以比输入图像高画质的图像为输出,例如比第2已学习模型的执行靠前而预先进行。
回到图4,最后输出具有良好的图像品质的重建图像135,将该重建图像135向用户显示,或为了在之后使用而保存。
接着,对DL网络的学习(例如,学习处理160)更详细地进行说明。这里,目标数据153如上述那样,是使用X射线管内的较小的焦点尺寸取得的高品质正弦图,输入数据157是使用较大的焦点尺寸取得的低品质正弦图。
图5表示实施方式的学习处理160的流程图。在学习处理160中,使用输入数据157及目标数据153作为学习数据而进行DL网络170的学习,作为其结果,将DL网络170从学习处理160的步骤319输出。离线DL学习处理160为了学习DL网络170而使用与作为对应的目标正弦图的目标数据153成对的、作为许多的输入数据157的输入正弦图,进行DL网络170的学习,根据作为输入数据157的输入正弦图,生成与作为目标正弦图的目标数据153相似的被滤波后的正弦图。
在学习处理160中,取得学习数据的集合,DL网络170被反复更新以减小误差(例如,通过损失函数生成的值)。DL网络推测由学习数据暗示的映射关系,此外,成本函数生成与作为目标正弦图的目标数据153和通过将DL网络170的当前的形式对作为输入数据157的输入正弦图应用而产生的结果之间的不匹配相关联的误差值。
例如,在特定的实施中,成本函数能够使用均方误差而使均方误差最小化。在多层感知机(Multilayer Perceptrons:MLP)神经网络的情况下,通过使用(概率性)梯度降低法使基于均方误差的成本函数最小化,从而为了网络的学习能够使用逆传播算法。
在学习处理160的步骤316中,生成关于DL网络170的系数的初始推测。例如,该初始推测可以基于被摄像的区域的先验性知识、或1个以上的例示性的噪声除去方法、边沿(edge)检测方法及/或斑点(blob)检测方法。进而,初始推测可以基于乐昆(LeCun)初始化、赛维尔(Xavier)初始化及凯明(Kaiming)初始化的某种来进行。
学习处理160的步骤316~319提供用来进行DL网络170的学习的优化方法的非限定的例子。
为了表示应用了当前的版本的DL网络170之后的、作为目标正弦图的目标数据153(即,真值(ground truth))与作为输入数据157的输入正弦图之间的差的尺度(例如,距离尺度),(例如使用损失函数或成本函数)计算误差。能够使用包含上述的成本函数的已知的成本函数或图像数据间的距离尺度来计算误差。进而,在特定的实施中,误差/损失函数可以使用铰链损失及交叉熵损失的1个或多个来计算。在实施方式的一例中,损失函数可以是目标数据与将输入数据对DL网络170应用的结果的差的l
即,损失函数也可以是峰值信噪比、结构相似性指数或输出正弦图与第2投影数据之间的差的l
在特定的实施方式中,学习通过使以下的损失函数最小化来执行。
这里,θ表示DL网络170的可调整的权重系数,h表示不能调整的参数(例如,重建内核的选择等用户选择的参数),y
这里,d
p是标度(scalar)量。该权重的选择被统计学平均估算法触发,这里的d
在实施方式的一例中,DL网络170使用逆传播进行学习。逆传播可以为了神经网络的学习而使用,与梯度降低优化法组合而使用。在正向通路时,算法基于当前的参数θ来计算网络的预测。
接着,将这些预测输入到损失函数中,由此与对应的真值标签(即,高品质的目标数据153)比较。在反向通路时,该模型计算与当前的参数有关的损失函数的梯度,然后,通过在被最小化的损失的方向上取预先设定的尺寸的步长尺寸,将参数更新(在涅斯捷罗夫(Nesterov)的运动量法及各种各样的自适应法中,能够选择步长尺寸以便更迅速地收敛而将损失尺寸优化)。
在执行反投影的优化方法中,可以使用梯度降低、批量梯度降低、概率性梯度降低及小批量概率性梯度降低的1个以上。正向通路及反向通路可以经由网络的各个层而阶段性地执行。
在正向通路(forward path)中,通过经由最初的层供给输入、进行用于后续的层的输出激活而开始执行。该处理被反复进行,直到达到最后的层的损失函数。在反向通路(backward path)时,最后的层关于其自身的可学习的参数(存在的情况)和作为以前的层的上游导函数发挥作用的独自的输入来计算梯度。该处理被反复进行,直到到达输入层。
如果回到图5,则学习处理160的步骤317例如由于能够计算误差梯度等网络中的变化的函数,所以能够决定误差中的变化,使用该误差中的变化,选择用于对于DL网络170的权重/系数的然后的变更的方向及步长尺寸。
这样计算误差的梯度,与梯度降低优化法的实施方式的一例一致。如本领域技术人员理解那样,在其他实施方式的一例中,可以将该步骤省略,及/或用遵循其他优化算法(例如,模拟退火法或遗传算法等的非梯度降低优化算法)的其他的步骤替换。
在学习处理160的步骤317中,对于DL网络170决定系数的新的集合。例如,权重/系数与梯度降低优化方法或超松弛加速法同样,可以使用在步骤317中计算出的变化进行更新。
在学习处理160的步骤318中,使用DL网络170的更新后的权重/系数,计算新的误差值。
在步骤319中,使用预先设定的停止基准,判定网络的学习是否完成。例如,预先设定的停止基准可以评价新的误差及/或所执行的重复的总数是否超过了预先设定的值。
例如,可以在新的误差低于预先设定的阈值的情况下,或在达到了重复的最大数的情况下,满足停止基准。在满足停止基准的情况下,在学习处理160中执行的学习处理使用新的权重及系数回到步骤317,通过反复进行该步骤,回到反复循环的开始(在反复循环中包括步骤317、318及319)。如果满足停止基准,则在学习处理160中执行的学习处理完成。
图6及图7表示DL网络170的层间的相互连接的两个例子。DL网络170可以包括完全连接的卷积层及池化层,以下说明它们的全部。在DL网络170的特定的优选实施中,相对于卷积层被配置在输入层的附近,执行高水平的推论的完全被连接的层朝向损失函数配置在该架构的更下游。证明了,如果在卷积层之后插入池化层,则滤波器的空间范围、及相应的可学习的参数的量减少。
激活函数还能够被装入到各种层中而导入非线性,此外对网络复杂的预测关系进行学习。激活函数是饱和激活函数(例如,S字型或双曲线正切激活函数)或归一化激活函数(例如,在上述的最初和第2个例子中应用的归一化线性单元(Rectified Linear Unit:ReLU))。DL网络170的层也可以如在上述的第1及第2例中例示那样组合进批量归一化。
图6表示具有N个输入、K个隐藏层、3个输出的通常的人工神经网络(ANN)的例子。各层由节点(也被称作神经元)构成,各节点执行输入的加权和,将该加权和的结果与阈值比较而生成输出。ANN构成函数的类(class),对此,该类的成员通过使阈值、连接的权重或节点的数及/或它们的连接等的架构的详细情况变化而取得。ANN的节点被称作神经元(或神经元节点),该神经元可以具有ANN系统的不同层间的相互连接。
在突触(synapse)(即,神经元间的连接)中,保存在计算中操作数据的被称作“权重”的值(也被称作“系数”或“权重系数”)。ANN的输出依存于3个类型的参数,即,(i)神经元的不同层间的相互连接样式,(ii)用来将相互连接的权重更新的学习处理,及(iii)将神经元的加权输入变换为其输出激活的激活函数这3个。
在数学上,神经元的网络函数m(x)被定义为与其他函数(多个)n
例如,ANN可以使用非线性的加权和,这里是
m(x)=K(∑
这里的K(通常被称作激活函数)是某个预先设定的函数例如双曲线正切。
在图6(及图7中也同样),神经元(即节点)由阈值函数的周围的圆表示。在图6所示的非限定性的例子中,输入被描绘为包括线性函数的圆,箭头表示神经元间的指向性连接。在实施方式的一例中,DL网络170是前馈网络。
图7表示DL网络170是卷积神经网络(CNN)的非限定性的例子。CNN是ANN的一种,具有对于图像处理有益的特性,因而,为了图像噪声除去应用而特别关联。CNN使用前馈ANN,这里神经元间的连接样式表示图像处理的卷积。
例如,CNN通过使用对输入图像的一部分进行处理的被称作感受野的较小的神经元聚集的多个层,可以用于图像处理的优化。接着,这些选择的输出为了得到比原来的图像更好的表现,可以以重叠的方式排列而显示。该处理样式可以遍及具有交替的卷积层及池化层的多个层而反复。
在卷积层之后,CNN可以包含本地及/或全局的池化层,它将卷积层的神经元簇的输出结合。除此以外,在特定的实施中,可以将与卷积层完全连接的层的各种组合包含在CNN中,每个点的非线性在各层的末端或之后被应用。
另外,在上述的实施方式中,对作为第1已学习模型的DL网络170的学习以焦点尺寸较大的投影数据为输入、以焦点尺寸较小的投影数据为输出而进行的情况进行了说明,但实施方式并不限于此。
作为一例,作为第1学习模型的DL网络170的学习还可以以使用第1尺寸的检测器元件收集到的数据为输入、以使用比第1尺寸小的第2尺寸的检测器元件收集到的数据为输出来进行。在此情况下,作为第1学习模型的DL网络170由进行焦点尺寸的学习的第1DL网络和进行检测器元件尺寸的学习的第2DL网络构成,对于第1DL网络和第2DL网络独立地进行学习,生成已学习模型。
在已学习模型的执行阶段、即处理100中,原始数据251例如是使用焦点尺寸较大的第1焦点尺寸并且检测器元件尺寸较大的第1尺寸的检测器元件收集到的数据。生成电路520通过对DL网络170输入原始数据251,输出与使用比第1焦点尺寸小的第2焦点尺寸并且比第1尺寸小的第2尺寸的检测器元件收集到的数据相当的数据。作为一例,生成电路520通过对第1DL网络输入原始数据251、将其输出结果对第2DL网络输入并得到其输出结果,从而取得与使用比第1焦点尺寸小的第2焦点尺寸并且比第1尺寸小的第2尺寸的检测器元件而收集到的数据相当的数据。
此外,作为另一例,也可以同时进行关于焦点尺寸的学习和关于检测器元件尺寸的学习。
例如,作为第1学习模型的DL网络170的学习也可以以使用第1焦点尺寸且第1尺寸的检测器元件收集到的数据为输入,以使用比第1焦点尺寸小的第2焦点尺寸且比第1尺寸小的第2尺寸的检测器元件收集到的数据为输出来进行。
此外,作为另一例,例如作为第1学习模型的DL网络170的学习以使用第1焦点尺寸且第2尺寸的检测器元件收集到的数据为输入、以使用第2焦点尺寸且第1尺寸的检测器元件收集到的数据为输出来进行等,在学习中使用的数据的组合也可以是其他的组合。
在上述的例子中,对X射线系统的实施方式进行了说明,但例如具有与图1的生成电路520、重建电路514、存储装置512、显示器516、输入装置515等同样的功能的图像处理装置也可以构成独立的图像处理装置。该图像处理装置具备具有与生成电路520同样的功能的生成电路,该生成电路通过对以利用第1焦点尺寸的X射线收集到的第1投影数据为输入、以利用比第1焦点尺寸小的第2焦点尺寸的X射线而收集的第2投影数据为输出而学习的第1已学习模型,输入利用比第2焦点尺寸大的第3焦点尺寸的X射线收集到的第3投影数据,从而生成第4投影数据。
此外,由计算机执行的程序也可以使计算机执行以下的步骤:通过对于以使用第1焦点尺寸的X射线收集到的第1投影数据为输入,以利用比第1焦点尺寸小的第2焦点尺寸的X射线收集到的第2投影数据为输出而学习的第1已学习模型,输入利用比第2焦点尺寸大的第3焦点尺寸的X射线收集到的第3投影数据,从而生成第4投影数据。
除了以上所述的实施方式以外,还能够采取以下的实施方式。
第1已学习模型也可以以第1投影数据与第2投影数据之间的第1差分数据为输出而进行学习。
例如,第1学习模型也可以是使用第1投影数据与第2投影数据之间的第1差分数据进行学习、通过输入第3投影数据而输出第2差分数据的残差网络。第4投影数据也可以基于上述第2差分数据和第3投影数据而生成。例如,第4投影数据也可以从第3投影数据减去第2差分数据而生成。
第1已学习模型也可以是以仅使用第1尺寸的检测机元件收集到的数据为输入,以(1)仅使用第2尺寸的检测机元件收集到的数据、(2)使用第1尺寸的检测器元件及第2尺寸的检测机元件双方收集到的数据、或(3)仅使用第1尺寸的检测器元件及使用第2尺寸的检测器元件收集到的数据为输出,而进行学习的已学习模型。第2尺寸比第1尺寸小。
第1已学习模型也可以是以使用第1尺寸的检测机元件及第2尺寸的检测器元件收集到的数据为输入,以(1)使用第2尺寸的检测机元件收集到的数据、或(2)仅使用第2尺寸的检测机元件收集到的数据为输出,进行了学习的已学习模型。第2尺寸比第1尺寸小。
第2尺寸也可以将n设为2以上的整数,是第1尺寸的1/n^2。第2尺寸也可以是第1尺寸的1/4。第2尺寸也可以是第1尺寸的1/9。
第1焦点尺寸既可以与第3焦点尺寸相同也可以不同。
第1已学习模型还可以利用使用具有与第1焦点尺寸不同的焦点尺寸的X射线源收集到的投影数据来进一步训练。该不同的焦点尺寸既可以与第3焦点尺寸相同,也可以大致相同。
第1焦点尺寸、第2焦点尺寸及第3焦点尺寸也可以通过受理用户的指示、或基于协议信息或检查区域信息来决定。
例如,X射线系统也可以从多个焦点尺寸之中,按照用户的指示、扫描协议信息或检查区域信息来选择焦点尺寸(第1焦点尺寸、第2焦点尺寸或第3焦点尺寸)。
进而,当X射线系统选择第3焦点尺寸时,生成部从多个已学习模型中选择第1已学习模型,将所选择的焦点尺寸的所收集到的投影数据对该第1已学习模型应用。换言之,学习既可以使用不同的已学习模型进行,也可以按照第3焦点尺寸的输入而选择已学习模型中的一个。
进而,当X射线系统从第3焦点尺寸之中选择不同的焦点尺寸时,重建部从多个已学习模型中选择与第1已学习模型不同的已学习模型,将选择的焦点尺寸的所收集到的投影模型对该不同的已学习模型应用。换言之,生成部也可以将不同的已学习模型的结果内插或外插,得到各种各样的焦点尺寸的数据。
也可以将第2投影数据和第4投影数据分别替换为CT图像数据。换言之,生成部也可以向第1已学习模型输入第2投影数据而生成第2CT图像数据。通过使用第1投影数据作为输入、使用第1CT图像数据作为输出来训练第1已学习模型。使用具有第1焦点尺寸的X射线源来收集第1投影数据。使用具有比第1焦点尺寸小的第2焦点尺寸的X射线源来收集第1CT图像数据。使用具有比第2焦点尺寸大的第3焦点尺寸的X射线源来收集第2投影数据。
也可以将第1投影数据和第3投影数据分别替换为CT图像数据。换言之,生成部也可以向第1已学习模型输入第2CT图像数据而生成第2投影数据。通过使用第1CT图像数据作为输入、使用第1投影数据作为输出来训练第1已学习模型。使用具有第1焦点尺寸的X射线源来收集第1CT图像数据。使用具有比第1焦点尺寸小的第2焦点尺寸的X射线源来收集第1投影数据。使用具有比第2焦点尺寸大的第3焦点尺寸的X射线源来收集第2CT图像数据。
也可以将第1投影数据、第2投影数据、第3投影数据和第4投影数据分别替换为CT图像数据。换言之,生成部也可以向第1已学习模型输入第3CT图像数据而生成第4CT图像数据。通过使用第1CT图像数据作为输入、使用第2CT图像数据或第1CT图像数据与第2CT图像数据之间的第1差分数据作为输出来训练第1已学习模型。使用具有第1焦点尺寸的X射线源来收集第1CT图像数据。使用具有比第1焦点尺寸小的第2焦点尺寸的X射线源来收集第2CT图像数据。使用具有比第2焦点尺寸大的第3焦点尺寸的X射线源来收集第3CT图像数据。
根据以上说明的至少1个实施方式,能够提高画质。
说明了几个实施方式,但这些实施方式是作为例子提示的,并非限定发明的范围。这些实施方式能够以其他各种各样的形态实施,在不脱离发明的主旨的范围内能够进行各种各样的省略、替换、变更、实施方式彼此的组合。这些实施方式及其变形包含在发明的范围或主旨中,并且包含在权利要求书所记载的发明和其等价的范围中。
关于以上的实施方式,作为发明的一技术方案及选择性的特征,公开以下的附述。
(附记1)
一种X射线系统,具备生成部,所述生成部通过对于以利用第1焦点尺寸的X射线收集到的第1投影数据为输入、以利用比上述第1焦点尺寸小的第2焦点尺寸的X射线收集到的第2投影数据为输出而进行了学习的第1已学习模型,输入利用比上述第2焦点尺寸大的第3焦点尺寸的X射线收集到的第3投影数据,从而生成第4投影数据。
(附记2)
具备基于上述第4投影数据重建第1图像的重建部。
第1焦点尺寸也可以与第3焦点尺寸相同。
第1焦点尺寸也可以与第3焦点尺寸不同。
也可以将第1已学习模型使用具有与第1焦点尺寸不同的焦点尺寸的X射线源收集到的投影数据进一步训练。该不同的焦点尺寸既可以与第3焦点尺寸相同,也可以大致相同。
X射线系统也可以从多个焦点尺寸之中按照用户的指示、扫描协议信息或检查区域信息来选择焦点尺寸。
当X射线系统从第3焦点尺寸之中选择不同的焦点尺寸时,重建部从多个已学习模型之中,选择与第1已学习模型不同的学习模型,将所选择的焦点尺寸的所收集到的投影模型对该不同的已学习模型应用。
(附记3)
通过对于基于上述第1图像生成比上述第1图像画质高的第2图像的第2已学习模型输入上述第1图像,生成上述第2图像。
(附记4)
上述第1已学习模型是以使用第1尺寸的检测器元件收集到的数据为输入、以使用比上述第1尺寸小的第2尺寸的检测器元件收集到的数据为输出、进一步进行了学习的已学习模型。
上述第1已学习模型是以仅使用第1尺寸的检测机元件收集到的数据为输入、以仅使用第2尺寸的检测机元件收集到的数据为输出而进行了学习的已学习模型。第2尺寸比第1尺寸小。
上述第1已学习模型是以使用第1尺寸的检测机元件收集到的数据为输入、以使用第1尺寸的检测器元件及第2尺寸的检测机元件收集到的数据为输出而进行了学习的已学习模型。第2尺寸比第1尺寸小。
上述第1已学习模型是以仅使用第1尺寸的检测机元件收集到的数据为输入、以仅使用第1尺寸的检测器元件及使用第2尺寸的检测器元件收集到的数据为输出而进行了学习的已学习模型。第2尺寸比第1尺寸小。
上述第1已学习模型是以使用第1尺寸的检测机元件及第2尺寸的检测器元件收集到的数据为输入、以使用第2尺寸的检测机元件收集到的数据为输出而进行了学习的已学习模型。第2尺寸比第1尺寸小。
上述第1已学习模型是以仅使用第1尺寸的检测机元件及使用第2尺寸的检测器元件收集到的数据为输入、以仅使用第2尺寸的检测机元件收集到的数据为输出而进行了学习的已学习模型。第2尺寸比第1尺寸小。
第2尺寸在设n为2以上的整数时,也可以是第1尺寸的1/n^2。第2尺寸也可以是第1尺寸的1/4。第2尺寸也可以是第1尺寸的1/9。
(附记5)
上述第1投影数据是使用第1尺寸的检测器元件收集到的数据;上述第2投影数据是使用比上述第1尺寸小的第2尺寸的检测器元件收集到的数据。
(附记6)
上述第1投影数据及上述第2投影数据是正弦图;上述第1图像是CT图像。
(附记7)
上述第2投影数据是通过将由多个检测器检测到的数据进行平均而取得的数据;上述第2投影数据的信噪比比上述第1投影数据的信噪比大。
(附记8)
将上述第2投影数据使用比上述第1投影数据小的点扩散函数取得;上述第4投影数据的分辨率比上述第3投影数据的分辨率高。
上述第1已学习模型也可以是使用上述第1投影数据与上述第2投影数据之间的第1差分数据进行学习、通过输入上述第3投影数据而输出第2差分数据的残差网络。
基于上述第2差分数据与第3投影数据之间的第2差分数据生成上述第4投影数据。
从上述第3投影数据减去第2差分数据而生成上述第4投影数据。
(附记9)
上述已学习模型的学习使用残差网络来进行;上述生成部通过从上述第3投影数据减去上述残差网络的输出而生成上述第4投影数据。
(附记10)
上述第1投影数据及上述第2投影数据是正弦图;上述已学习模型以如下方式进行学习,该方式是:反复调整神经网络的权重系数,以使得根据基于上述第1投影数据而输出的输出正弦图和上述第2投影数据之间的不一致度而决定的损失函数最小。
(附记11)
上述损失函数是峰值信噪比、结构相似性指数、或上述输出正弦图与上述第2投影数据之间的差的l
(附记12)
上述第3投影数据是荧光透视数据。
(附记13)
上述第3投影数据是X射线CT投影数据;还具备可旋转的机架;上述机架包括:X射线管,构成为,在上述机架上绕摄像对象旋转,焦点的尺寸根据阳极上的电子束的面积和相对于从上述阳极释放的包含X射线的X射线束的方向的上述阳极的角度而被控制;以及检测器阵列,是包括多个检测器的检测器阵列,配置在与上述X射线管径向相反侧的机架上,与上述X射线管一起旋转,基于上述X射线生成上述投影数据。
(附记14)
通过对于以利用第1焦点尺寸的X射线收集到的第1投影数据为输入、以利用比上述第1焦点尺寸小的第2焦点尺寸的X射线收集到的第2投影数据为输出而进行了学习的第1已学习模型,输入利用比上述第2焦点尺寸大的第3焦点尺寸的X射线收集到的第3投影数据,从而生成第4投影数据。
(附记15)
一种程序,使计算机执行以下的步骤:通过对于以利用第1焦点尺寸的X射线收集到的第1投影数据为输入、以利用比上述第1焦点尺寸小的第2焦点尺寸的X射线收集到的第2投影数据为输出而进行了学习的第1已学习模型,输入利用比上述第2焦点尺寸大的第3焦点尺寸的X射线收集到的第3投影数据,从而生成第4投影数据。
也可以将第2投影数据和第4投影数据分别替换为CT图像数据。换言之,生成部也可以向第1已学习模型输入第2投影数据而生成第2CT图像数据。通过使用第1投影数据作为输入、使用第1CT图像数据作为输出而训练第1已学习模型。使用具有第1焦点尺寸的X射线源收集第1投影数据。使用具有比第1焦点尺寸小的第2焦点尺寸的X射线源收集第1CT图像数据。使用具有比第2焦点尺寸大的第3焦点尺寸的X射线源收集第2投影数据。
也可以将第1投影数据和第3投影数据分别替换为CT图像数据。换言之,生成部也可以向第1已学习模型输入第2CT图像数据而生成第2投影数据。通过使用第1CT图像数据作为输入、使用第1投影数据作为输出而训练第1已学习模型。使用具有第1焦点尺寸的X射线源收集第1CT图像数据。使用具有比第1焦点尺寸小的第2焦点尺寸的X射线源收集第1投影数据。使用具有比第2焦点尺寸大的第3焦点尺寸的X射线源收集第2CT图像数据。
也可以将第1投影数据、第2投影数据、第3投影数据和第4投影数据分别替换为CT图像数据。换言之,生成部也可以向第1已学习模型输入第3CT图像数据而生成第4CT图像数据。通过使用第1CT图像数据作为输入、使用第2CT图像数据或第1CT图像数据与第2CT图像数据之间的第1差分数据作为输出而训练第1已学习模型。使用具有第1焦点尺寸的X射线源收集第1CT图像数据。使用具有比第1焦点尺寸小的第2焦点尺寸的X射线源收集第2CT图像数据。使用具有比第2焦点尺寸大的第3焦点尺寸的X射线源收集第3CT图像数据。
标号说明
512 存储装置
514 重建电路
515 输入装置
516 显示器
520 生成电路
- X射线诊断装置、医用图像处理装置、图像处理装置、X射线诊断装置控制程序、医用图像处理程序、以及图像处理程序
- X射线系统、图像处理装置及程序