外科铰接臂
文献发布时间:2023-06-19 09:52:39
相关申请
根据美国法典第35篇第119条(e)款,本申请要求2018年6月17日提交的美国临时专利申请号62/686,023的优先权益,所述临时专利申请的内容以引用方式整体并入本文。
本申请涉及PCT专利申请号PCT/IL2015/050891、PCT/IL2015/050892、PCT/IL2015/050893和PCT/IL2016/050976、美国专利申请公布号2017-0258539-A1以及美国临时申请号62/468,507、62/583,540和62/583,543。
以上申请的内容全部如同在本文中完整阐述一般以引用方式整体并入。
技术领域和背景技术
本发明在其一些实施方案中涉及一种铰接机械臂、对所述臂的鲁棒且准确的机械控制,并且更具体地但不排他地涉及一种在重复移动下维持其机械完整性的铰接机械臂。
美国专利号7,862,580公开了“本发明涉及一种具有腕机构的工具,所述腕机构以使得所述工具在侧倾、俯仰和横摆方面没有奇异性的方式提供俯仰旋转和横摆旋转。在一个实施方案中,一种微创外科器械包括:细长轴,所述细长轴具有工作端、近侧端部和位于所述工作端与所述近侧端部之间的轴心线;以及端部执行器。一种腕构件具有柔性管,所述柔性管包括延伸通过由壁围绕的内部的轴线。所述柔性管的所述壁包括大致平行于所述柔性管的所述轴线取向的多个管腔。所述腕构件具有连接到所述细长轴的所述工作端的近侧部分和连接到所述端部执行器的远侧部分。多条致动缆线具有连接到所述端部执行器的远侧部分,并且从所述远侧部分穿过所述腕构件的所述壁的所述管腔朝向所述细长轴延伸到近侧部分,所述近侧部分能够致动以使所述腕构件以俯仰旋转和横摆旋转弯曲。”
发明内容
以下是本发明的一些实施方案的实施例。除非明确禁止,否则一个实施例的特征可与一个或多个其他实施例的特征组合,并且形成本发明的一些实施方案的另外的实施例。
实施例1.一种铰接臂,其包括:
管状结构,所述管状结构包括多个联接的纵向区段,所述多个联接的纵向区段包括:
至少一个刚性部分;以及
至少一个柔性部分,所述至少一个柔性部分包括多个连接的环形部分;
其中所述管状结构包括:
沟槽,所述沟槽沿着所述管状结构的长轴形成并且沿着所述多个联接的纵向区段延伸;以及
覆盖件,所述覆盖件附接到所述管状结构并且覆盖所述沟槽的至少一部分。
实施例2.根据实施例1所述的铰接臂,其中所述沟槽不径向穿透所述管状结构的壁到达所述管状结构的内表面。
实施例3.根据实施例1-2中任一项所述的铰接臂,其中所述覆盖件将所述管状结构完善成管状形状。
实施例4.根据实施例1-3中任一项所述的铰接臂,其中所述覆盖件的外轮廓包含于所述管状结构在切割所述沟槽之前的外轮廓。
实施例5.根据实施例1-4中任一项所述的铰接臂,其包括:至少一个凸缘,所述至少一个凸缘设置在所述沟槽的边缘中的至少一个的至少一部分处,其中所述覆盖件附接到所述至少一个凸缘。
实施例6.根据实施例5所述的铰接臂,其中所述至少一个凸缘在所述管中所述沟槽的边缘处切割至小于所述沟槽的深度。
实施例7.根据实施例1-4中任一项所述的铰接臂,其中所述覆盖件附接到所述沟槽的壁。
实施例8.根据实施例1-7中任一项所述的铰接臂,其包括:细长元件,所述细长元件用于控制所述铰接臂,其中所述细长元件:
设置在所述沟槽内;
由所述覆盖件至少部分地封闭在所述沟槽内;并且
联接到所述管状结构的在所述至少一个柔性部分远侧的一部分。
实施例9.根据实施例8所述的铰接臂,其中所述柔性部分的屈曲通过改变所述细长元件上的张力来控制。
实施例10.根据实施例1-8中任一项所述的铰接臂,其包括:
第二沟槽,所述第二沟槽沿着所述管状结构的长轴切割;以及
第二覆盖件,所述第二覆盖件附接到并且覆盖所述第二沟槽。
实施例11.根据实施例10所述的铰接臂,其中所述第二沟槽与所述第一沟槽周向地相背对。
实施例12.根据实施例10-11中任一项所述的铰接臂,其包括:第二细长元件,所述第二细长元件用于控制所述铰接臂,其中所述细长元件:
设置在所述第二沟槽内;
由所述第二覆盖件至少部分地封闭在所述第二沟槽内;并且
联接到所述管状结构的在所述至少一个柔性部分远侧的一部分。
实施例13.根据实施例12所述的铰接臂,其中所述柔性部分的屈曲通过改变所述细长元件和所述第二细长元件上的张力来控制。
实施例14.根据实施例1-13中任一项所述的铰接臂,其中所述覆盖件包括至少一个宽部分。
实施例15.根据实施例14所述的铰接臂,其中所述至少一个宽部分与所述至少一个刚性部分轴向地对准。
实施例16.根据实施例14-15中任一项所述的铰接臂,其中所述沟槽在所述至少一个宽部分的位置处的尺寸的大小和形状被设定成接收所述宽部分。
实施例17.根据实施例1-13中任一项所述的铰接臂,其中所述覆盖件包括分别设置在所述覆盖件的近侧端部和远侧端部处的第一宽部分和第二宽部分。
实施例18.根据实施例17所述的铰接臂,其中所述第一宽部分和所述第二宽部分各自轴向地设置在所述管状结构的刚性部分处。
实施例19.根据实施例1-18中任一项所述的铰接臂,其包括:第二管状结构,所述第二管状结构设置在所述第一管状结构的中心中空通路内。
实施例20.一种铰接臂,其包括:
第一管状结构,所述第一管状结构包括:
第一管状结构柔性部分;
至少一个第一管状结构刚性部分;
中心中空通路;
至少一个第一管状结构中空通路,所述至少一个第一管状结构中空通路位于所述第一管状结构的壁内并占据所述壁的径向部分并且沿着所述第一管状结构的长轴延伸;
第二管状结构,所述第二管状结构包括设置在所述中心中空通路内的包括与所述第一管状结构柔性部分轴向地对准的可弯曲部分的至少一部分。
实施例21.根据实施例20所述的铰接臂,其中所述第二管状结构包括第二管状结构柔性部分。
实施例22.根据实施例20-21中任一项所述的铰接臂,其中所述第二管状结构包括至少一个第二管状结构刚性部分。
实施例23.根据实施例20所述的铰接臂,其中所述第二管状结构包括:至少一个中空通路,所述至少一个中空通路位于所述第二管状结构的壁内并占据所述壁的径向部分并且沿着所述第一管状结构的长轴延伸。
实施例24.一种铰接臂,其包括:
细长管状结构,所述细长管状结构包括:
可弯曲部分,所述可弯曲部分包括:
多个连接的环形部分;
多个连接器,每个环形部分由连接器连接到相邻的环形部分;
多个连接器中空通路,每个所述连接器包括连接器中空通路;
刚性部分,所述刚性部分联接到所述可弯曲部分并且包括刚性部分中空通路;以及
控制缆线,所述控制缆线在所述可弯曲部分远侧联接到所述细长管状结构,设置在所述刚性部分中空通路和所述多个连接器中空通路内并且延伸通过所述通路。
实施例25.根据实施例24所述的铰接臂,其中所述连接器沿所述管状结构的长轴的方向延伸。
实施例26.根据实施例24-25中任一项所述的铰接臂,其中所述管状结构包括位于所述可弯曲部分远侧的柔性部分;
其中所述控制缆线在所述柔性区段的最近侧部分远侧联接到所述管状结构;
其中改变所述控制缆线上的张力致动所述柔性区段的弯曲。
实施例27.根据实施例24-26中任一项所述的铰接臂,其包括:
第二管状结构,所述第二管状结构包括:
第二管状结构中心中空通路,所述管状结构的至少一部分设置在所述第二管状结构中心中空通路中;
第二管状结构柔性部分,其中所述管状结构可弯曲部分与所述第二管状结构柔性部分轴向地对准并且其中所述第二管状结构柔性部分的屈曲由此使所述可弯曲部分弯曲。
实施例28.一种铰接臂,其包括:
端部执行器;
成型支撑结构,所述成型支撑结构包括沿着所述支撑结构纵向地并且围绕所述支撑结构周向地延伸的沟槽;
电力供应缆线,所述电力供应缆线坐置在所述沟槽的至少一部分内,所述电力供应缆线沿着所述支撑结构纵向地并且围绕所述支撑结构周向地延伸。
实施例29.根据实施例28所述的铰接臂,其包括:管状结构,所述管状结构沿着所述铰接臂纵向地延伸,其中所述成型支撑结构和所述电力供应缆线设置在所述管状结构的中空通路内。
实施例30.根据实施例28-29中任一项所述的铰接臂,其包括:控制缆线;
其中所述成型支撑结构包括纵向地延伸通过所述支撑结构的至少一部分的支撑结构中空通路,并且其中所述控制缆线的至少一部分设置在所述支撑结构中空通路内。
实施例31.根据实施例30所述的铰接臂,其中所述控制缆线联接到所述端部执行器并且被配置为致动所述端部执行器。
实施例32.根据实施例31所述的铰接臂,其中所述控制缆线是被配置为将扭矩传递到所述端部执行器以致动所述端部执行器的扭矩缆线。
实施例33.根据实施例28-32中任一项所述的铰接臂,其中对于所述成型支撑结构的长度的至少一部分,所述沟槽围绕所述支撑结构呈螺旋形状。
实施例34.一种制造铰接臂的方法,其包括:
提供管状结构;
沿着所述管状结构的长度切割沟槽;
用覆盖件覆盖所述沟槽;以及
将所述管状结构的所述长度的至少一部分切割成段以形成分段关节。
实施例35.根据实施例34所述的方法,其中所述切割所述管状结构的所述长度的至少一部分是通过激光切割进行的。
实施例36.根据实施例34-35中任一项所述的方法,其中所述覆盖是通过将所述覆盖件激光焊接在所述管状结构上的适当位置以覆盖所述沟槽进行的。
实施例37.根据实施例34-36中任一项所述的方法,其中所述切割沟槽包括切割一个或多个较宽部分。
实施例38.根据实施例37所述的方法,其中所述覆盖件包括大小和形状被设定成配合到所述沟槽的一个或多个较宽部分中。
实施例39.根据实施例34-38中任一项所述的方法,其包括:将控制缆线插入所述沟槽中。
实施例40.一种铰接臂,其包括管状结构,所述管状结构包括:
至少一个可弯曲部分,所述至少一个可弯曲部分包括由空间隔开的多个联接的部分,所述联接的部分各自包括沿轴向方向延伸的中空通路;
控制缆线,所述控制缆线沿所述轴向方向延伸,其中沿着所述可弯曲部分延伸的所述控制缆线的长度的30%-70%设置在所述中空通路内。
除非另有定义,否则本文中使用的所有技术和/或科学术语具有与本发明所属领域的普通技术人员通常所理解的含义相同的含义。虽然与本文中所描述的方法和材料相似或相当的方法和材料可用于实践或测试本发明的实施方案,但下文仍描述示例性方法和/或材料。在起冲突的情况下,以包括定义的专利说明书为准。此外,所述材料、方法以及实施例仅为说明性的,而非意图为必然是限制性的。
如本领域技术人员将了解,本发明的一些实施方案可体现为系统、方法或计算机程序产品。因此,本发明的一些实施方案可采取完全硬件实施方案、完全软件实施方案(包括固件、常驻软件、微代码等)或组合软件和硬件方面的实施方案的形式,所述实施方案在本文中一般都可称为“电路”、“模块”或“系统”。此外,本发明的一些实施方案可采取体现在一种或多种计算机可读介质中的计算机程序产品的形式,所述一种或多种计算机可读介质具有在其上体现的计算机可读程序代码。本发明的一些实施方案的方法和/或系统的实现方式可涉及手动地、自动地或以它们的组合的形式执行和/或完成所选任务。此外,根据本发明的方法和/或系统的一些实施方案的实际仪器和设备,若干所选任务可例如使用操作系统由硬件、由软件或由固件和/或由它们的组合来实现。
例如,用于根据本发明的一些实施方案执行所选任务的硬件可实现为芯片或电路。作为软件,根据本发明的一些实施方案的所选任务可实现为多个软件指令,这些软件指令由计算机使用任何合适的操作系统来执行。在本发明的示例性实施方案中,根据如本文所述的方法和/或系统的一些示例性实施方案的一个或多个任务由诸如用于执行多个指令的计算平台的数据处理器执行。任选地,数据处理器包括用于存储指令和/或数据的易失性存储器和/或用于存储指令和/或数据的非易失性存储装置,例如,磁性硬盘和/或可移除介质。任选地,也提供网络连接。也任选地提供显示器和/或诸如键盘或鼠标的用户输入装置。
一种或多种计算机可读介质的任何组合可用于本发明的一些实施方案。计算机可读介质可为计算机可读信号介质或计算机可读存储介质。计算机可读存储介质可以是例如但不限于电子、磁性、光学、电磁、红外或半导体系统、设备或装置或者前述的任何合适的组合。计算机可读存储介质的更具体示例(非详尽列表)将包括以下介质:具有一根或多根导线的电连接;便携式计算机软盘、硬盘、随机存取存储器(RAM)、只读存储器(ROM)、可擦除可编程只读存储器(EPROM或闪存存储器)、光纤、便捷式光盘只读存储器(CD-ROM)、光学存储装置、磁性存储装置或前述的任何合适的组合。在本文档的上下文中,计算机可读存储介质可以是可包含或存储供指令执行系统、设备或装置使用或者与所述指令执行系统、设备或装置结合使用的程序的任何有形介质。
计算机可读信号介质可包括(例如)处于基带中或作为载波一部分的其中体现有计算机可读程序代码的传播数据信号。此类传播信号可采取各种形式中的任何一种,包括但不限于电磁信号、光学信号或它们的任何合适组合。计算机可读信号介质可以是任何计算机可读介质,其并非计算机可读存储介质,并且可传达、传播或传送供指令执行系统、设备或装置使用或与所述指令执行系统、设备或装置结合使用的程序。
在计算机可读介质上体现的程序代码和/或由此使用的数据可使用任何适当的介质来传输,所述介质包括但不限于无线、有线线路、光纤缆线、RF等或前述介质的任何合适的组合。
用于执行本发明的一些实施方案的操作的计算机程序代码可用一种或多种编程语言的任何组合来编写,所述编程语言包括面向对象的编程语言,诸如Java、Smalltalk、C++等,以及常规程序性编程语言,诸如“C”编程语言或类似编程语言。程序代码可完全在用户的计算机上执行、部分地在用户的计算机上执行、作为独立的软件包执行,部分地在用户的计算机上且部分地在远程计算机上执行,或者完全在远程计算机或服务器上执行。在后一种场景中,远程计算机可通过任何类型的网络(包括局域网(LAN)或广域网(WAN))连接到用户的计算机,或者可连接到外部计算机(例如,使用互联网服务提供商以通过互联网)。
本发明的一些实施方案可在下文参考根据本发明的实施方案的方法、设备(系统)和计算机程序产品的流程图图解和/或框图来描述。将理解,流程图图解和/或框图的每个方框以及流程图图解和/或框图中的方框的组合可由计算机程序指令实现。可将这些计算机程序指令提供给通用计算机、专用计算机或其他可编程数据处理设备的处理器以便产生一种机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令创建用于实现一个或多个流程图和/或框图方框中所指定的功能/动作的手段。
还可将这些计算机程序指令存储在可引导计算机、其他可编程数据处理设备或其他装置以特定方式起作用的计算机可读介质中,使得存储在计算机可读介质中的指令产生一种制品,所述制品包括实现一个或多个流程图和/或框图方框中所指定的功能/动作的指令。
还可将计算机程序指令加载到计算机、其他可编程数据处理设备或其他装置上,以致使在计算机、其他可编程设备或其他装置上执行一系列操作步骤来产生计算机实现的过程,使得在计算机或其他可编程设备上执行的指令提供用于实现一个或多个流程图和/或框图方框中所指定的功能/动作的过程。
本文所述的方法中的一些方法通常仅设计用于供计算机使用,并且对于仅通过人类专家手动执行而言可能并不可行或实用。可能预期希望手动地执行类似任务(诸如收集牙科测量结果)的人类专家使用完全不同的方法,例如,利用专家知识和/或人脑的模式识别能力,这将比手动地遍历本文所述方法的步骤高效得多。
附图说明
本发明的一些实施方案仅通过举例的方式并参考附图而在本文中描述。现在详细具体地参考附图,据强调,所示的细节是通过举例的方式,并且是为了说明性地论述本发明的实施方案的目的。就此而言,使用附图进行的描述使可如何实践本发明的实施方案对于本领域技术人员变得显而易见。
在附图中:
图1是根据本发明的一些实施方案的机械臂的简化示意性侧视图;
图2是根据本发明的一些实施方案的外科系统的简化示意图;
图3A至图3B是根据本发明的一些实施方案的机械臂的简化示意图;
图4A至图4B是根据本发明的一些实施方案的机械臂的简化示意性剖面;
图5A是根据本发明的一些实施方案的机械臂的简化示意性剖视图;
图5B至图5F是根据本发明的一些实施方案的管状结构沟槽的简化示意性剖面;
图6A是根据本发明的一些实施方案的在激光切割之前的管状结构的简化示意图;
图6B是根据本发明的一些实施方案的在激光切割之后的管状结构的简化示意图;
图6C是根据本发明的一些实施方案的图6B的放大部分;
图6D是根据本发明的一些实施方案的扭矩传递部分的一部分的简化示意图;
图6E是根据本发明的一些实施方案的扭矩传递部分638的简化示意性平面图;
图7A是根据本发明的一些实施方案的端部执行器和端部执行器支撑结构的一部分的简化示意性侧视图;
图7B是根据本发明的一些实施方案的端部执行器的一部分、支撑结构的简化示意图和管状结构的剖视图;
图7C是根据本发明的一些实施方案的联接到缆线的支撑结构的简化示意图;
图7D是根据本发明的一些实施方案的包括由连接器和支撑结构连接的扭矩缆线和刚性轴的扭矩缆线元件的简化示意图;
图8A是根据本发明的一些实施方案的机械臂的一部分的剖面的简化示意图和端部执行器组件的侧视图;
图8B是根据本发明的一些实施方案的端部执行器组件的简化示意性侧视图;
图9A至图9C是根据本发明的一些实施方案的电力供应缆线的电连接的实施方案的简化视图;
图10A是根据本发明的一些实施方案的外科机械臂致动器1000的简化示意图;
图10B是根据本发明的一些实施方案的外科机械臂致动器1000的简化分解视图;
图10C是根据本发明的一些实施方案的附接到齿轮滑块的缆线终端部分的简化示意图;
图11是根据本发明的一些实施方案的外科机械臂致动器的简化剖视图;
图12是根据本发明的一些实施方案的制造机械铰接臂的方法的流程图;
图13是根据本发明的一些实施方案的制造铰接外科臂的详细方法的流程图;
图14A是根据本发明的一些实施方案的外科机械臂的一部分的简化示意图;
图14B是根据本发明的一些实施方案的包括工具和腕轴承的外科机械臂的远侧部分的简化示意图;
图14C是根据本发明的一些实施方案的腕轴承的简化示意图;并且
图14D是根据本发明的一些实施方案的肩轴承的简化示意性剖面。
具体实施方式
本发明在其一些实施方案中涉及一种铰接机械臂、对所述臂的鲁棒且准确的机械控制,并且更具体地但不排他地涉及一种在重复移动下维持其机械完整性的铰接机械臂。
概述
本发明的一些实施方案的广义方面涉及一种铰接臂的一条或多条控制缆线的支撑。在一些实施方案中,缆线维持处于已知的位置,从而潜在地改进缆线对铰接臂的控制的准确性。在一些实施方案中,控制缆线的大部分长度支撑在例如分开的支撑件处。潜在的优点是摩擦磨损(例如,与臂的移动相关联,从而引起缆线在支撑件内的移动)分布在缆线的大部分上,从而潜在地增加了缆线的寿命。另一潜在优点是提高了使用缆线的控制的准确性。例如,支撑大部分缆线潜在地意味着:缆线上的张力例如随着与臂的长轴长度相比的缆线长度变化而准确地传递,当缆线弯曲时,通过增大被支撑的缆线的比例来减小张力。在一些实施方案中,支撑控制缆线的长度的70%-99.9%或80%-99.9%或90%-99.9%或90%-99%或93%-97%或约95%或者更低或更高或中间范围或百分比。
在一些实施方案中,对于延伸通过包括开放空间的管状部分(“部分”)的缆线(其中,在一些实施方案中,开放空间实现弯曲,例如,如下所述),延伸通过所述部分的缆线的长度的10%-70%、30%-70%或20%-50%或30%-50%或者更低或更高或中间范围或百分比设置在部分(例如,可弯曲部分或柔性部分)的壁内,其中缆线的长度的其余部分设置在开放空间内。
在一些实施方案中,控制缆线控制臂在一个或多个关节处的弯曲。在一些实施方案中,弯曲通过改变一个或多个控制缆线上的张力来控制。在一些实施方案中,一个或多个控制缆线通过施加到控制缆线的扭矩来致动铰接臂的至少一部分。
本发明的一些实施方案的广义方面涉及一种铰接臂,其包括管状结构,其中一条或多条控制缆线位于所述管状结构的壁内的中空通路内。潜在地,将缆线定位在所述管状结构内意味着支撑大部分所述控制缆线。潜在地,例如与通过使用另外的元件将缆线联接到管状结构来对其进行支撑对比,将缆线支撑在通道内机械地简化了对缆线的支撑。潜在地,将缆线支撑在通道内增加缆线支撑件的强度,从而潜在地增加臂在负载下的鲁棒性,例如,在一些实施方案中,负载包括在工具附接到组织(例如,向下夹紧在组织上时)并且使用臂来操纵组织时的臂上的力。本发明的一些实施方案的一个方面涉及一种铰接臂,其包括至少两个管状结构,其中所述管状结构彼此嵌套在其内并且其中控制缆线位于最外侧管状结构的壁内的中空通路内。潜在的益处是(例如,与容纳在最外侧管状结构的内壁与内管状结构的外壁之间的控制缆线相比):对于给定外管状结构的外剖面尺寸而言,能够具有较厚的管状结构壁。另外的益处包括例如支撑大部分控制缆线使摩擦损耗沿着控制缆线分布和/或维持控制缆线的位置潜在地有助于更准确的控制。
在一些实施方案中,所述最外侧管状结构包括多于一个中空通路,每个中空通路容纳至少一条控制缆线。在一些实施方案中,所述内管状结构包括一个或多个中空通路,每个中空通路容纳至少一条控制缆线。在一些实施方案中,所述中空通路在所述管状结构上周向地对准。
在一些实施方案中,所述铰接臂包括多于两个嵌套管状结构。例如,在一些实施方案中,第一管状结构容纳第二管状结构,并且任选地,在一些实施方案中,第三管状结构容纳在所述第二管状结构内。在一些实施方案中,所述管状结构中的一个或多个包括位于所述管状结构的壁内的一个或多个缆线通路,其中所述缆线通路容纳控制缆线。在一些实施方案中,所述铰接臂包括2个或3个或4个或5个或2-5个或2-10个或者更低或更高或中间数目或范围的嵌套管状结构。
在一些实施方案中,一种臂管状结构包括一个或多个可弯曲部分和/或一个或多个柔性部分,其中所述壁在所述柔性部分/可弯曲部分处的弯曲通过改变一条或多条控制缆线上的张力来控制。在一些实施方案中,一种可弯曲部分包括由连接器连接的环形部分,其中所述控制缆线延伸通过环形部分和/或连接器内的中空通路。在一些实施方案中,一种柔性部分包括多个顺序联接的联接件,其中在一些实施方案中,控制缆线延伸通过所述联接件内的中空通路。
本发明的一些实施方案的一个方面涉及一种管状结构,其包括可弯曲扭矩传递部分,所述可弯曲扭矩传递部分包括由连接器顺序地连接的多个部分,其中连接相邻的部分的连接器的至少一部分包括被配置为承载控制缆线的通道。在一些实施方案中,所述通道(其在一些实施法中为中空通路)中的一个或多个设置在所述管状结构的壁内。在一些实施方案中,每个部分包括一个或多个横梁,其中横梁由空间隔开并且由连接器连接。在一些实施方案中,所述可弯曲扭矩传递部分通过横梁的弯曲而弯曲。其中,在一些实施方案中,横梁在所述可弯曲扭矩传递部分的一侧上朝向彼此弯曲,从而减小所述横梁之间的空间。在一些实施方案中,所述横梁承载所述弯曲负载。将所述控制缆线设置在所述连接器内的潜在优点在于用于所述控制缆线的所述中空通路不位于横梁上并且不使所述横梁弱化。在一些实施方案中,将控制缆线设置在连接器内增大被支撑的缆线的比例,从而潜在地减少缆线上的磨损和/或提高使用缆线的控制的准确性。
本发明的一些实施方案的一个方面涉及一种铰接臂,其包括至少一个管状结构,所述管状结构包括位于所述管状结构的壁内的覆盖的沟槽,其中覆盖的沟槽不与所述管状结构整体形成。在一些实施方案中,所述沟槽的大小和/或形状被设定成容纳一条或多条控制缆线。在一些实施方案中,所述覆盖件凹入到所述管状结构的外轮廓下方。
在一些实施方案中,所述管状结构是通过在管中切割一个或多个沟槽、将覆盖件附接到所述管状结构来构造的,所述覆盖件覆盖所述沟槽的至少轴向部分。在一些实施方案中,所述管接着被切割以形成柔性和/或可弯曲扭矩传递部分(例如,激光切割)。在一些实施方案中,所述覆盖件包括主体部分和一个或多个较宽端部部分,其中,在一些实施方案中,所述端部部分沿垂直于所述主体部分的长轴的尺寸更大。潜在地,较宽端部部分强化了覆盖件与管的联接。在一些实施方案中,所述覆盖件的大小被设定成使得所述端部部分位于柔性和/或可弯曲扭矩传递部分的区域外侧,潜在益处在于更强的联接而无需焊接区域在柔性和/或可弯曲部分的区域处侧向地延伸。
本发明的一些实施方案的一个方面涉及一种成型支撑结构,所述成型支撑结构被配置为支撑和/或保护设置在铰接臂管状结构中空通路内的一条或多条缆线。
在一些实施方案中,所述支撑结构与所述铰接臂的端部执行器一起旋转。在一些实施方案中,所述端部执行器的旋转通过联接到所述端部执行器的管状结构的旋转来致动。在一些实施方案中,所述支撑结构设置在所述管状结构的中心中空通路内并且联接到所述支撑结构,使得所述管状结构的旋转使所述支撑结构旋转。在一些实施方案中,所述支撑结构的大小和/或形状被设定成使得所述支撑结构与所述支撑结构的内壁之间的摩擦足够大,以便所述支撑结构与管状结构一起旋转,例如而无需另外的结构联接。例如,在一些实施方案中,所述支撑结构接触所述管状结构的所述内壁,例如达所述内壁圆周剖面的1%-50%或5%-30%或15%-25%或约20%。
在一些实施方案中,支撑结构支撑控制缆线,从而将控制缆线维持处于已知位置(和/或距已知位置较小距离处),从而潜在地提高使用所支撑控制缆线的控制的准确性。
在一些实施方案中,支撑结构包括端部执行器致动缆线设置在其中的中空通路。在一些实施方案中,支撑结构中空通路被配置成(例如,其大小和/或形状被设定成和/或具有足够低的摩擦的壁)使得致动缆线的移动不产生支撑结构的移动。在示例性实施方案中,端部执行器致动缆线通过扭矩致动端部执行器。
在一些实施方案中,多于一条缆线设置在管状结构内的中空通路中。例如,在一些实施方案中,支撑结构在隔开缆线的同时固持多于一条缆线,从而潜在地减小和/或消除例如臂的移动(例如,臂的部分的旋转和/或臂在关节处的弯曲)期间的缆线之间的摩擦。
在一些实施方案中,第二缆线设置在管状结构的中空通路内,其中支撑结构和/或管状结构被配置成使得它们的旋转使第二缆线旋转。在一些实施方案中,第二缆线设置在支撑结构的外表面与管状结构的内壁之间。在一些实施方案中,多于两条缆线设置在中空通路内,例如,多于一条非弹性缆线(例如,电力供应缆线),例如,多于一条控制缆线。
在一些实施方案中,支撑结构包括大小和/或形状被设定成接收第二缆线的沟槽。在一些实施方案中,第二缆线在沟槽与管状结构的内壁之间固持在适当位置。
在一些实施方案中,支撑结构连续地支撑一条或多条缆线的长度的80%-99.9%或90%-99.9%或90%-99%或90%-95%。
在一些实施方案中,第二缆线具有有限的弹性(例如电力供应缆线)。在一些实施方案中,支撑结构的形状被设定成在向缆线提供支撑的同时沿着路径引导缆线,所述路径围绕支撑件的周长分布,例如,围绕支撑结构的螺旋路径。在一些实施方案中,支撑结构在固持缆线的同时允许缆线例如在支撑件的弯曲期间在支撑件上移动,其中,例如,在一些实施方案中,设置在弯曲部的内侧上的缆线朝向设置在弯曲部的外侧上的缆线滑动。
本发明的一些实施方案的一个方面涉及致动器零件,所述致动器零件被配置用于便于正确地制造用于外科机械臂的致动器。在一些实施方案中,被配置为在轴上线性地移动(例如,通过螺纹部)的致动控制缆线的滑块具有不同的大小和/或形状(例如,不同的扇区角和/或厚度),使得被配置为接收每个滑块的凹穴具有不同的大小和/或形状,从而潜在地确保滑块在凹穴内的正确放置。
在一些实施方案中,外科机械臂柔性部分的屈曲的致动通过改变联接到柔性部分的一条或多条缆线上的张力来控制。在一些实施方案中,(一条或多条缆线的)控制缆线张力由联接到轴的滑块的线性移动控制,其中轴的旋转产生滑块的线性移动(例如,通过在轴和/或滑块上的螺纹部)。在示例性实施方案中,第一滑块和第二滑块联接到轴,并且滑块控制外科机械臂柔性部分的屈曲,滑块随着轴的旋转沿相反方向线性地移动,联接到一个滑块的第一缆线松弛并且联接到另一个滑块的第二缆线张紧以使柔性部分弯曲。
本发明的一些实施方案的一个方面涉及缆线(例如,电力供应缆线)的另外的长度到铰接臂中的结合。在一些实施方案中,缆线的另外的长度位于臂的一部分处;例如,在一些实施方案中,另外的是指并非使缆线沿着缆线的两个连接部之间的长度延伸到臂所必需的缆线长度。在一些实施方案中,例如释放所述另外的长度,以提供另外的长度,使得可移除缆线的一部分。在一些实施方案中,缆线围绕铰接部分的一个或多个部分缠绕,使得缆线可退绕以增加缆线的长度。在一些实施方案中,缆线的另外的部分由覆盖件覆盖。潜在地,另外的缆线使得能够修理和/或维护和/或改变缆线和/或缆线的连接部的构型。
在示例性实施方案中,电力供应缆线包括缆线的设置在电力供应缆线的近侧端部处的另外的长度。在一些实施方案中,电力供应缆线沿着臂的长度的至少一部分朝向位于臂的远侧部分处(例如,臂的远侧端部处)的电外科工具延伸。在一些实施方案中,电力供应缆线将来自臂的近侧端部处的电接触件的电力传递到电外科工具。在一些实施方案中,电外科工具是可旋转的(例如,围绕铰接臂的长轴),在一些实施方案中,电力供应缆线与电外科工具一起旋转。在示例性实施方案中,电力供应缆线围绕支撑缆线的可旋转轴缠绕,并且退绕以释放另外的缆线长度。
在详细解释本发明的至少一个实施方案之前,应当理解,本发明的应用并不必然限于在以下描述中阐述和/或在附图和/或示例中示出的部件和/或方法的构造和布置细节。本发明能够具有其他实施方案或能够以各种方式实践或执行。
在一些实施方案中,一个或多个管状结构由不锈钢构造。替代地或另外,在一些实施方案中,一个或多个管状结构由塑料构造。在一些实施方案中,外科机械臂是一次性的单次使用外科器械。替代地,在一些实施方案中,外科机械臂的部分通过高压灭菌器和/或ETO消毒(环氧乙烷消毒)来消毒。在一些实施方案中,外科机械臂在消毒之前部分地或完全拆卸。
示例性铰接机械臂
图1是根据本发明的一些实施方案的机械臂102的简化示意性侧视图。
在一些实施方案中,机械臂102包括多个关节;柔性部分104、106。在一些实施方案中,机械臂包括一个或多个刚性部分(例如部分105、107、108中的一者或多者是刚性的),关节与刚性部分交替。在一些实施方案中,在柔性部分中的一者或多者处的弯曲是弯曲沿着柔性部分的长度分布的情况。
在一些实施方案中,机械臂102包括联接到第二柔性部分106的第一柔性部分104。在一些实施方案中,第二柔性部分联接到刚性支撑部分108。在一些实施方案中,第一柔性部分联接到端部执行器110。
在一些实施方案中,柔性部分104、106中的一者或两者是可弯曲的,每个部分处于单个弯曲平面。在一些实施方案中,每个柔性部分可在单个弯曲平面中沿一个旋转方向从笔直构型弯曲。
在一些实施方案中,一个或两个柔性部分104、106可围绕柔性部分长轴旋转。由此,第二柔性部分106的旋转改变第一柔性部分104的单个弯曲平面的取向。在一些实施方案中,柔性部分的旋转通过联接到柔性部分的刚性部分的旋转来实现。例如,在一些实施方案中,第二柔性部分106通过支撑部分108围绕支撑部分长轴的旋转而围绕第二柔性部分长轴旋转。
在一些实施方案中,机械臂102是例如大小和/或形状被设定用于插入身体(例如人体)中的外科机械臂。例如,在一些实施方案中,外科机械臂的大小和/或形状被设定用于腹腔镜手术和/或用于插入通过自然孔口和/或内腔,例如阴道、肛门、口腔、气管、食道或耳道。在一些实施方案中,臂和/或臂的远侧部分的最大剖面尺寸是0.5mm-20mm或1mm-10mm或1mm-5mm,或者更低或更高或中间范围或尺寸。其中远侧部分被限定为机械臂的长轴长度的远侧5%-90%或5%-50%或5%-20%或者更低或更高或中间百分比或范围,和/或被限定为臂的在第二柔性部分106远侧并且包括所述第二柔性部分106的一部分。
图2是根据本发明的一些实施方案的外科系统200的简化示意图。
在一些实施方案中,系统200包括一个或多个外科臂,例如,两个外科臂202、212。在一些实施方案中,每个外科臂由电机单元218、204致动。在一些实施方案中,电机单元218、204彼此连接。在一些实施方案中,一个或两个电机单元218、222由支撑件222支撑。在一些实施方案中,支撑件222连接到患者支撑件220(例如外科床)。
在一些实施方案中,外科臂202、212例如通过自然孔口(例如通过阴道)插入患者214体内。在一些实施方案中,电机单元204、218通过缆线224接收电力和/或控制指令。
图3A至图3B是根据本发明的一些实施方案的机械臂302的简化示意图。
在一些实施方案中,包括柔性部分的外科机械臂302(例如包括如关于外科臂102和/或柔性部分104、106(图1)描述和/或示出的一个或多个特征)包括一个或多个嵌套管状结构。
在一些实施方案中,部分通过在部分远侧并且连接到部分的一部分的旋转而围绕部分的长轴和/或外科机械臂的长轴旋转(例如包括如关于第二柔性部分106和支撑部分108(图1)描述的一个或多个特征)。另外或替代地,在一些实施方案中,部分通过部分的近侧端部的旋转而旋转。
在一些实施方案中,图3A至图3B示出机械臂302的远侧端部330通过在远侧端部330近侧并且与之联接的近侧部分332的旋转进行的旋转。在一些实施方案中,远侧端部330包括端部执行器和/或用于端部执行器310的连接器。
图3B示出近侧部分332包括例如被配置为将施加到扭矩传递部分的一个端部的扭矩传递到另一个端部的一个或多个柔性扭矩传递部分的实施方案,其中一个或多个扭矩传递部分包括如关于638(图6A至图6E)示出和/或描述的一个或多个特征。
在一些实施方案中,远侧端部330和近侧部分332是管状结构。在一些实施方案中,机械臂302包括多个管状结构,例如,在示例性实施方案中,三个管状结构:内管状结构324、中间管状结构326和外管状结构328。其中,在一些实施方案中,每个管状结构包括一个或多个柔性部分和/或一个或多个柔性扭矩传递部分。
包括示例性控制缆线壳体的示例性臂
图4A至图4B是根据本发明的一些实施方案的机械臂402的简化示意性剖面。
在一些实施方案中,机械臂402分别包括第一柔性部分404和第二柔性部分406。在一些实施方案中,柔性部分404、406包括如关于柔性部分104、106(图1)描述和/或示出的一个或多个特征。
在一些实施方案中,机械臂402包括一个或多个嵌套管状结构。在一些实施方案中,机械臂包括内管状结构424、中间管状结构426和外管状结构428。
在一些实施方案中,一个或多个管状结构包括柔性部分和/或扭矩传递部分,其中,在一些实施方案中,在图4A至图4B中,点状填充物指示扭矩传递部分并且成角阴影指示柔性部分,其中一个或多个扭矩传递部分包括如关于638(图6A至图6E)示出和/或描述的一个或多个特征。
在一些实施方案中,内管状结构424分别包括第一扭矩传递部分434和第二扭矩传递部分436。
在一些实施方案中,中间管状结构426包括扭矩传递部分438和第一柔性部分404。
在一些实施方案中,外管状结构428包括第二柔性部分406。
在一些实施方案中,柔性部分404、406中的一者或多者的屈曲通过改变联接到外科机械臂的一部分的一个或多个元件上的张力来控制。
例如,在一些实施方案中,图4A至图4B示出由第一柔性部分缆线444、446中的一者或两者控制的第一柔性部分404的屈曲。从图4A中所示的构型到图4B所示的构型的移动例如通过推动缆线444和/或拉动缆线446来实现。
类似地,在一些实施方案中,第二柔性部分406的屈曲通过第二柔性部分缆线448、450中的一者或两者来控制。
在一些实施方案中,一个或多个柔性部分各自由多于两条缆线(例如,3-15条或3-10条或3-6条或者更低或更高或中间数目或范围的缆线)控制。在一些实施方案中,一个或多个柔性部分各自由单条缆线控制。
在一些实施方案中,一条或多条缆线延伸通过机械臂的实心部分内的中空通路。例如,在一些实施方案中,缆线延伸通过管状部分内的中空通路。
在示例性实施方案中,被配置为控制柔性部分的缆线延伸通过柔性部分是其一部分的管状结构内的中空通路。例如,在一些实施方案中,控制缆线448、450各自延伸通过管状结构内的中空通路。
在一些实施方案中,臂402的远侧部分(例如内管状结构424的远侧部分)可通过内管状结构的近侧部分的旋转来旋转。
在一些实施方案中,第一柔性部分缆线444、446分别在连接部452、454处连接到中间管状结构426。在一些实施方案中,第二柔性部分缆线448、450分别在连接部456、458处连接到外管状结构428。
在一些实施方案中,一条或多条控制缆线与管状结构的连接是通过例如通过焊接将缆线的远侧部分(例如端部)连接到管状结构进行的。
在一些实施方案中,一条或多条控制缆线是带状缆线,例如,具有纵横比大于1:1的剖面,例如1:1.1或1:1.5或1:2或1:1.1-1:2或者更低或更高或中间范围或比率。带状缆线的潜在优点包括旋转和/或扭转的强度和/或阻力。在一些实施方案中,一条或多条控制缆线是编织缆线,潜在优点在于缆线的柔性。在一些实施方案中,一条或多条控制缆线涂覆有例如低摩擦涂层(例如塑料涂层),从而潜在地减小缆线与机械臂的其他部分(例如沟槽)之间的摩擦,从而潜在地减少缆线上的磨损。
在一些实施方案中,一个或多个(例如所有)管状结构在柔性部分之间和/或在远侧部分近侧是刚性的。
在一些实施方案中,端部执行器410通过联接到端部执行器的元件的旋转来致动。在一些实施方案中,端部执行器通过旋转进行的致动包括如关于国际专利申请号WO2016/035084的图36A至图36B和美国专利申请号62/583,543的图11A至图11C和图12A至图12B描述和/或示出的一个或多个特征,所述申请以引用方式整体并入。
替代地或另外,在一些实施方案中,端部执行器410通过改变一条或多条控制缆线上的张力(例如通过“推拉”)来致动,其中致动通过在将一条或多条控制缆线拉紧的同时使其他控制缆线松弛来实现。
在一些实施方案中,一个或多个管状结构各自联接到另一个管状结构(例如管状结构联接到围绕它的结构)。例如,在一些实施方案中,外管状结构428通过连接器470联接到中间管状结构426。例如,在一些实施方案中,中间管状结构426通过连接器472联接到内管状结构424。在一些实施方案中,连接器470、472中的一者或多者防止管状结构相对于彼此轴向移动。另外或替代地,在一些实施方案中,连接器470、472中的一者或多者包括促进管状结构相对于彼此(例如,每个管状结构围绕其长轴和/或围绕臂的长轴)的旋转的轴承。
图5A是根据本发明的一些实施方案的机械臂500的简化示意性剖视图。在一些实施方案中,一条或多条缆线(例如,控制缆线)容纳在管状结构的壁内的通道中。在一些实施方案中,通道由管状结构壁内的沟槽形成,在一些实施方案中,所述沟槽至少部分地通过覆盖件进行覆盖。
在一些实施方案中,图5A示出沿着标记为AA的短划线截取的图1的机械臂和/或沿着标记为BB的短划线截取的图4A的机械臂的剖面。
在图5A中可见的是外管状结构528、中间管状结构526和内管状结构524。在一些实施方案中,一个或多个管状结构524、526、528各自包括一个或多个沟槽560、562、564、566。在一些实施方案中,一个或多个管状结构各自包括两个沟槽,在一些实施方案中,所述沟槽彼此相背对地设置,例如,关于管状结构的中心对称地放置。在一些实施方案中,外管状结构528包括外管状结构沟槽560、562。在一些实施方案中,中间管状结构526包括中间管状结构沟槽564、566。
在一些实施方案中,一个或多个沟槽各自容纳一条或多条控制缆线。在示例性实施方案中,每个沟槽容纳单条控制缆线,其中,在一些实施方案中,沟槽560、562、564、566分别容纳缆线568、570、572、574。
在一些实施方案中,一个或多个沟槽(例如每个沟槽)至少部分地由一个或多个覆盖件封闭,其中在示例性实施方案中,沟槽560、562、564、566分别由覆盖件584、586、588、590覆盖。
在一些实施方案中,一个或多个沟槽(例如,沟槽564、566、560、562中的一者或多者)的一个或多个轴向部分的剖面形状是圆形段,例如,半圆形形状。在一些实施方案中,沟槽具有恒定的剖面形状(其中剖面是垂直于沟槽的长轴截取的)。
在一些实施方案中,沟槽包括一个或多个凸缘(例如,包括如关于图5B和/或图5D示出和/或描述的一个或多个特征),并且覆盖件接触和/或附接到凸缘。
在一些实施方案中,沟槽没有凸缘,覆盖件例如接触和/或连接到沟槽的壁,例如包括如关于图5E描述和/或示出的一个或多个特征。
在一些实施方案中,外科机械臂500具有形状和/或尺寸不同的沟槽。例如,在一些实施方案中,机械臂具有不同大小和/或形状的沟槽,例如,沟槽被配置用于与其作为一部分的管状结构的尺寸兼容和/或容纳设置在沟槽内的不同数目和/或大小和/或形状的缆线。
例如,在一些实施方案中,中间管状结构526的沟槽和外管状结构528的沟槽具有不同形状和/或尺寸。
在示例性实施方案中,中间管状结构沟槽564、566没有连续凸缘,其中,例如,超过90%或超过95%或者更低或更高或中间百分比的沟槽的长度没有凸缘,例如,包括如关于图5E示出和/或描述的一个或多个特征。
在示例性实施方案中,中间管状结构沟槽564、566具有圆直径为0.4mm的半圆形剖面形状。
在示例性实施方案中,外管状结构沟槽560、562在超过70%或超过80%或超过90%或超过95%或者更低或更高或中间百分比的沟槽的长度上具有凸缘。
在示例性实施方案中,中间管状结构沟槽560、562具有圆直径为0.6mm的半圆形剖面形状。
图5B至图5F是根据本发明的一些实施方案的管状结构沟槽的简化示意性剖面。在图5B至图5E中,管状结构外壁表示为527。
在一些实施方案中,图5C示出附接覆盖件536之后的沟槽,其中,在一些实施方案中,沟槽的宽度测量为沟槽剖面沿垂直于管状结构径向方向的方向的最大尺寸,其中在一些实施方案中,沟槽的深度测量为沟槽剖面沿管状结构径向方向的最大尺寸。在一些实施方案中,沟槽剖面尺寸沿着管状结构的长度是恒定的。替代地,在一些实施方案中,沟槽剖面沿着管状结构长度改变(例如渐缩)。
在一些实施方案中,一个或多个覆盖件和/或沟槽的大小和/或形状被设定成使得覆盖件不从管状结构的外轮廓突出,例如,覆盖件凹入在沟槽内,其中外轮廓例如在一些实施方案中是围绕管状结构的平滑曲面,所述轮廓在一些实施方案中具有圆形剖面。
在一些实施方案中,覆盖件通过安置在凸缘上而凹入在外轮廓内,例如,如图5B至图5D所示。在一些实施方案中,覆盖件通过安置(例如,附接)在沟槽的壁上而凹入,例如,如图5E所示。
在一些实施方案中,机械臂包括中间管状结构(例如,426,图4B),所述中间管状结构包括没有凸缘的沟槽。在一些实施方案中,机械臂包括外管状结构(例如,428,图4B),所述外管状结构包括具有凸缘的沟槽。
替代地,在一些实施方案中,机械臂的所有沟槽包括凸缘。替代地,在一些实施方案中,机械臂的所有沟槽没有凸缘。在一些实施方案中,单个管状结构包括具有凸缘和/或具有包括凸缘的部分的沟槽以及没有凸缘的沟槽。
现在参考图5B至图5D,在一些实施方案中,沟槽具有大小和/或形状被设定成支撑覆盖件536(例如图5C、图5E所示)的边缘的一个或多个凸缘534。
在一些实施方案中,外管状结构的一个或多个沟槽(例如双沟槽外管状结构的两个沟槽)包括以下沟槽:所述沟槽在示例性实施方案中是约0.6mm深和宽,例如,具有半圆形剖面,其中半圆的直径是约0.6mm。在一些实施方案中,沟槽深度(和/或直径)是0.1mm-2mm或0.2mm-1mm或者更低或更高或中间范围或距离。
在一些实施方案中,外管状结构的一个或多个沟槽(例如双沟槽外管状结构的两个沟槽)包括以下凸缘:所述凸缘在示例性实施方案中具有约0.15mm的深度和约0.2mm的宽度(例如,参考图5B,深度d、宽度w)。在一些实施方案中,凸缘宽度和/或深度是0.01mm-1mm、0.05mm-0.5mm或0.1mm-0.3mm或者更低或更高或中间范围或距离。
在一些实施方案中,中间管状结构的一个或多个沟槽(例如双沟槽中间管状结构的两个沟槽)包括以下沟槽:所述沟槽在示例性实施方案中是约0.4mm深且约0.7mm宽(其中沟槽的基部具有圆形基部),具有例如半圆形剖面,其中半圆的直径是约0.4mm。在一些实施方案中,中间管状结构沟槽是0.05mm-1mm宽(例如,图5F,宽度W2)或0.2mm-0.6mm宽或者更低或更高或中间范围或宽度。在一些实施方案中,中间管状结构沟槽是0.05mm-2mm深(例如,图5F,深度D2)或0.2mm-1mm深或者更低或更高或中间范围或深度。
在一些实施方案中,沟槽530的剖面具有圆形形状(例如,如图5B至图5C、图5E至图5F所示)。例如,半圆形。替代地,在一些实施方案中,例如,如图5D所示,沟槽532具有非圆形剖面形状,例如,包括带有角度的一个或多个拐角,所述角度为20°-260°或45°-135°或者更低或更高或中间角度或范围。
图6A是根据本发明的一些实施方案的在激光切割之前的管状结构600的简化示意图。
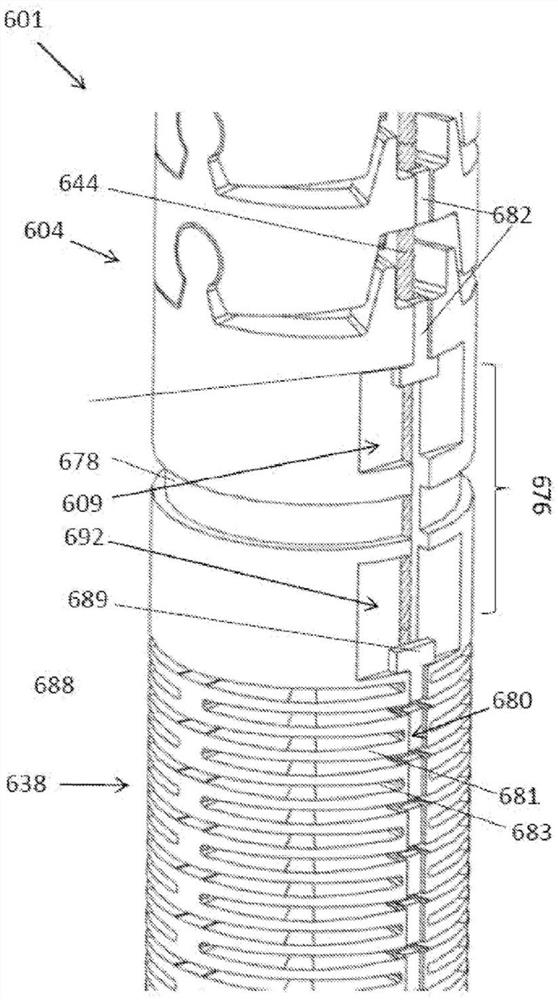
图6B是根据本发明的一些实施方案的在激光切割之后的管状结构601的简化示意图。
图6C是根据本发明的一些实施方案的图6B的放大部分。
在一些实施方案中,对管状结构600进行激光切割来产生管状结构601。替代地或另外,在一些实施方案中,通过另一技术(例如水射流切割和/或等离子体射流切割)进行切割。
在一些实施方案中,管状结构600包括在一些实施方案中平行于管状结构600的长轴取向的一个或多个沟槽。在一些实施方案中,一个或多个沟槽由一个或多个覆盖件688、690覆盖。在一些实施方案中,(例如,覆盖件688、690中的)一个或多个覆盖件不是管状结构的整体部分。在一些实施方案中,覆盖件688中的一个或多个附接(例如焊接,例如激光焊接)到管状结构,其中附接例如包括到沟槽内的表面的附接。在一些实施方案中,当管状结构600被切割以形成管状结构601时,覆盖件690、688分别被切割成区段682、680。
在一些实施方案中,沟槽和/或通过覆盖沟槽形成的通道被配置为承载一条或多条缆线,例如控制缆线644,其在图6B中可见于切穿图6A的管状区段的空间中和沟槽的未由覆盖件覆盖的部分。
在一些实施方案中,图6B示出中间管状结构的一部分,所述部分例如包括如关于中间管状结构426(图4A至图4B)描述和/或示出的一个或多个特征。在一些实施方案中,管状结构601包括柔性部分604和扭矩传递部分638,其中柔性部分604在一些实施方案中包括如关于“柔性部分”示出和/或描述的一个或多个特征,并且其中扭矩传递部分638包括如关于国际专利申请号WO2016/035084中的扭矩“传递部分”示出和/或描述的一个或多个特征。
在一些实施方案中,管状结构包括被配置用于将管状结构联接到外部管状结构(例如,外管状结构428(图4A至图4B))的部分676。在一些实施方案中,部分676包括环形沟槽678,所述环形沟槽678的大小和/或形状被设定成接收连接器(例如,连接器470(图4A至图4B))的一部分,从而潜在地防止连接器与管状结构之间的轴向移动,例如同时允许管状结构在连接器内的旋转,例如,其中连接部是轴承。在一些实施方案中,部分676不包括用于缆线沟槽的覆盖件,从而潜在地减少管状结构601与同部分676对准的连接器之间的摩擦。
在一些实施方案中,覆盖件690、688中的一者或多者包括宽度大于覆盖件的主体和/或所述主体的平均宽度的一个或多个部分603、689。在一些实施方案中,覆盖件包括宽于覆盖件的中心主体的端部部分。
例如,现在参考图6C,在一些实施方案中,覆盖件的较宽部分(例如,端部部分)的宽度605是例如覆盖件的主体的宽度607和/或覆盖件的主体的平均宽度的1.1-10倍或1.1-3倍或1.1-2倍或约1.5倍或者更低或更高或中间倍数或范围。在示例性实施方案中,宽度605为约0.9mm,宽度607为约0.6mm,并且长度615为约0.4mm。
在示例性实施方案中,覆盖件包括两个端部的较宽端部部分,例如,如图6E所示。在一些实施方案中,覆盖件包括多于两个较宽部分,例如,3-5个,例如,所述较宽部分沿着覆盖件的长度分布。
潜在地,覆盖件的较宽部分促进覆盖件的定位和/或增加覆盖件与管状结构和/或沟槽的联接的强度。例如,在一些实施方案中,较宽部分在覆盖件的附接期间例如通过激光焊接将覆盖件牢固地固持到沟槽,从而潜在地实现较薄的沟槽和/或覆盖件。在一些实施方案中,较薄的沟槽和/或覆盖件实现具有较小支柱(支柱,例如,如下文所述)的扭矩传递部分,潜在优点在于扭矩传递部分的弯曲的弹性增大。在一些实施方案中,扭矩传递部分的弹性增大有助于部分在部分的重复弯曲移动下的鲁棒性增强。
在一些实施方案中,沟槽凸缘是管状结构的柔性部分和/或扭矩传递部分的扩展外部区域,例如,入口692和609(图6B)。在一些实施方案中,入口692的宽度611(图6C)是覆盖件的端部的宽度605和/或覆盖件607的主体的宽度的1.5-20倍或2-10倍。在一些实施方案中,入口692的高度613(图6C)是覆盖件的端部的高度615的1.5-20倍或2-10倍。
在一些实施方案中,入口足够深以固持覆盖件而覆盖件不从管状结构的表面突出。例如,入口是覆盖件的厚度的1-2倍或1-1.5倍或者更低或更高或中间倍数或范围。在一些实施方案中,比端部部分的长度615长的凹口实现覆盖件的附接,其中在覆盖件的长度与沟槽的长度之间存在差异。
在一些实施方案中,对于臂的一个或多个可弯曲部分,可弯曲部分680的弯曲是通过使部分的横梁681弯曲以减小横梁之间的空间683(例如,包括如关于国际专利申请号WO2016/035086的图21至图26描述和/或示出的一个或多个特征)进行的。
在一些实施方案中,对于臂的一个或多个可弯曲部分,横梁沿轴向方向的厚度是管状结构的直径的0.1%-10%或1%-10%或1%-5%或约3%。在一些实施方案中,空间沿轴向方向的厚度在横梁的厚度的20%或10%或5%或2%以内。
在一些实施方案中,对于臂的一个或多个可弯曲部分,横梁沿轴向方向的厚度是管状结构的壁的厚度的20%-90%或40%-70%或者更低或更高或中间百分比或范围。
在一些实施方案中,对于臂的一个或多个可弯曲部分,横梁沿轴向方向的厚度是可弯曲部分的轴向长度的0.01%-3%或0.5%-2%或约1%或者更低或更高或中间范围百分比。
示例性扭矩传递部分结构
在一些实施方案中,扭矩传递部分638包括如关于国际专利申请号WO2016/035084中的扭矩传递部分示出和/或描述的一个或多个特征。
图6D是根据本发明的一些实施方案的扭矩传递部分638的一部分的简化示意图。
在一些实施方案中,图6D示出图6B的扭矩传递部分638的一部分。
在一些实施方案中,扭矩传递部分638包括对准到管状结构中的多个环形部分,其中每个环形部分通过一个或多个支柱连接到相邻环形部分。在示例性实施方案中,每个环形部分通过两个支柱连接到每个相邻环形部分。在一些实施方案中,支柱关于环形部分周向相等地间隔。
在图6D中,示例性环形部分由短划线指示。其中中心环形部分691分别通过支柱697和699连接到相邻环形部分693、695。在一些实施方案中,每个环形部分通过两个支柱连接到相邻环形部分。
图6E是根据本发明的一些实施方案的扭矩传递部分638(例如,如图6B、图6D所示)的简化示意性平面图。
图6E中可见的是支柱697和699。图6E示出将环形部分691连接到环形部分693的支柱671和将环形部分691连接到环形部分695的支柱671。在一些实施方案中,支柱671、699分别包括提供被配置为容纳控制缆线的中空通路的沟槽664、666(以及在一些实施方案中,用于沟槽的覆盖件)。
示例性缆线支撑结构
在一些实施方案中,铰接臂(例如,包括如关于图1、图3A至图3B、图4A至图4B、图5A至图5E描述和/或示出的一个或多个特征)包括联接到设置在管状结构的中空通路中的一条或多条缆线的细长支撑结构。在一些实施方案中,缆线设置在最内侧管状结构(例如,最内侧管状结构424(图4A至图4B))的中空通路内。在一些实施方案中,支撑结构将一条或多条缆线隔开,例如,从而在缆线长度的至少一部分内防止缆线彼此接触。在一些实施方案中,支撑结构支撑和/或引导一条或多条缆线,例如,将缆线保持处于例如相对于臂的其他部分的已知位置。
在示例性实施方案中,细长支撑结构支撑单个端部执行器控制缆线和单个电外科供应缆线(例如,被配置为供应单极和/或双极电力)。
例如,现在返回到图5A,在一些实施方案中,内管状结构524内的中空通路576容纳端部执行器控制元件578和/或端部执行器电外科供应缆线580。在一些实施方案中,控制元件578和/或缆线580由支撑结构582支撑。其中,在臂控制元件578的一些部分中的是轴,并且在臂控制元件578的一些部分中的是缆线,例如,扭矩缆线。
在一些实施方案中,端部执行器控制元件578(例如在一些实施方案中,包括扭矩缆线和/或轴)控制端部执行器(例如,端部执行器110(图1)、410(图4A至图4B))的致动,其中,例如,在一些实施方案中,端部执行器控制元件578被配置为将扭矩传递到端部执行器,这致动端部执行器,例如,打开和/或闭合端部执行器的夹持器或剪刀。在一些实施方案中,控制元件578传递由例如位于端部执行器近侧和/或铰接臂的近侧端部处的电机施加的扭矩。
替代地或另外,在一些实施方案中,端部执行器通过改变联接到端部执行器的一条或多条缆线上的张力(例如通过“推拉”)来致动,例如,包括如关于美国专利号US 9,039,057中的工具致动描述和/或示出的一个或多个特征,所述专利以引用方式整体并入本文。
在一些实施方案中,支撑结构是细长元件。在一些实施方案中,支撑结构支撑(例如,连续地支撑)设置在管状结构(例如,最内侧管状结构)内的一条或多条缆线的长度的至少20%或40%或60%或80%或者更低或更高或中间百分比。
在一些实施方案中,支撑结构的大小和/或形状被设定成使得由支撑结构支撑的缆线处于中空通路内的已知位置,从而改进例如当控制缆线相对于中空通路的剖面具有小剖面时使用缆线的控制的准确性。
在一些实施方案中,支撑结构的剖面的大小和/或形状被设定成坐置在中空通路内并且将一条或多条缆线固持在中空通路内变化中空通路的直径的至多1%-20%或1%-5%的径向位置处。
图7A是根据本发明的一些实施方案的端部执行器710和端部执行器支撑结构712的一部分的简化示意性侧视图。
图7B是根据本发明的一些实施方案的端部执行器710的一部分、支撑结构712的简化示意图和管状结构714的剖视图。
在一些实施方案中,管状结构714是铰接臂的最内侧管状结构,例如,包括关于内管状结构424(图4A至图4B)描述和/或示出的一个或多个特征。在一些实施方案中,缆线780贯穿管状结构714延伸,缆线联接到支撑结构712。
图7C是根据本发明的一些实施方案的联接到支撑结构712的缆线780的简化示意图。
在一些实施方案中,缆线780是例如在一些实施方案中被配置为供应电外科功率的电力供应缆线。替代地或另外,在一些实施方案中,缆线780和/或另外的缆线被配置为承载数据(例如来自传感器,例如控制信号)和/或提供功率以用于其他目的,例如,用于照明、传感器功率供应。
在一些实施方案中,支撑结构712的大小和/或形状被设定成在支撑结构712内的中空通道724内容纳缆线。在一些实施方案中,单条控制缆线725位于中空通道内。在示例性实施方案中,扭矩传递元件725位于中空通道内。在一些实施方案中,中空通道的大小和/或形状被设定成允许扭矩传递元件725(其在一些实施方案中为例如扭矩缆线)在中空通道内旋转。
在一些实施方案中,支撑结构712的大小和/或形状被设定成在周围管状结构714旋转时旋转。例如,在一些实施方案中,支撑结构712的大小和/或形状被设定成在管状结构与支撑结构之间具有高摩擦。在一些实施方案中,支撑结构712的外轮廓的最大剖面尺寸和管状结构714的内壁直径相同或者在相同尺寸的0.5%或1%以内。
在一些实施方案中,支撑结构712与周围管状结构的内壁之间的接触对于臂的至少轴向部分是管状结构714的内壁的表面的5%-50%或5%-30%或5%-20%或10%-20%或约15%或者更低或更高或中间百分比或范围。在一些实施方案中,管状结构内壁直径为1mm-5mm或2mm-3mm或约2.7mm或者更低或更高或中间范围或直径。
在一些实施方案中,支撑结构712的形状被设定成在管状结构714的内壁剖面的一个或多个离散部分(例如,1-10个或2-5个或4个或者更低或更高或中间数目或范围的部分)处接触所述内壁。在示例性实施方案中,支撑结构712的接触部分的剖面长度为0.01mm-1mm或0.1mm-0.5mm或0.2mm-0.4mm或约0.3mm或者更低或更高或中间范围或长度。
在一些实施方案中,支撑结构712被配置为足够柔性,以随着铰接臂的弯曲而(例如重复地)弯曲,例如而不损失机械完整性。
在一些实施方案中,支撑结构712的形状被设定成包括大小和/或形状被设定成接收缆线780的沟槽。在一些实施方案中,沟槽设置在支撑元件的外表面上。在一些实施方案中,支撑结构沟槽被配置为将缆线780固持成使得缆线780在支撑结构在臂关节处的弯曲期间保持处于沟槽内。
在一些实施方案中,固持缆线780的沟槽被配置成使得缆线780沿着支撑结构712沿循的路径使缆线围绕支撑结构周向地分布。例如,在一些实施方案中,被配置为固持缆线780的沟槽具有螺旋形状。在一些实施方案中,缆线780以一定长度围绕支撑结构沿循一圈,所述长度为支撑结构的直径的约5-30倍或10-25倍或15-20倍或者更低或更高或中间范围或倍数。
缆线围绕支撑结构周向分布的潜在益处在于在支撑结构的弯曲期间缆线上的总应变减小。例如,周向分布在一些实施方案中意指:当支撑结构(例如,通过周围管状结构)弯曲时,缆线的一部分被压缩并且一部分被张紧。在一些实施方案中,压缩和张紧(例如,通过使其内的缆线滑动)降低缆线上的总体和/或平均张力,其中,弯曲例如是通过支撑结构设置在其内的柔性部分的弯曲进行的。
在一些实施方案中,对于单个可弯曲部分,缆线周向地分布成使得在支撑结构长度与缆线长度之间存在0.5mm-5mm或1mm-3mm或约2mm的长度差。在一些实施方案中,可弯曲部分为2cm-20cm或5cm-15cm或约10cm长或者更低或更高或中间范围或长度。在一些实施方案中,与支撑结构的成型部分的长度相比,缆线长度增加了0.5%-10%或0.5%-5%或1%-5%或1%-3%或约2%或者更低或更高或中间范围或百分比。
图7D是根据本发明的一些实施方案的包括由连接器722和支撑结构782、712连接的扭矩缆线725和刚性轴778的扭矩缆线元件的简化示意图。
在一些实施方案中,724的直径为1.1mm-1.3mm。
在一些实施方案中,扭矩元件(例如,缆线)725的直径为0.1mm-2mm或0.5mm-1.5mm或0.9mm-1.1mm或约1mm或者更低或更高或中间范围或直径。
在一些实施方案中,电力供应缆线780的直径为0.1mm-1mm或0.4mm-0.5mm或约0.45mm或者更低或更高或中间范围或直径。
图8A是根据本发明的一些实施方案的机械臂802的一部分的剖面的简化示意图和端部执行器组件810的侧视图。
图8B是根据本发明的一些实施方案的端部执行器组件811的简化示意性侧视图。
在一些实施方案中,(例如,如关于图4A至图4B描述和/或示出的),机械臂802包括多个嵌套管状结构828、826、824。
在一些实施方案中,端部执行器组件810是机械臂的最内侧部分,所述最内侧部分在一些实施方案中在端部执行器组件810的远侧端部处联接到端部执行器(图8A中未示出)。
在一些实施方案中,端部执行器组件810为在一些实施方案中延伸通过最内侧管状结构824内的中空通路823的细长部分。在一些实施方案中,端部执行器组件810包括联接到一个或多个刚性轴的一个或多个可弯曲的扭矩传递部分(例如扭矩缆线)。在一些实施方案中,端部执行器组件的与机械臂的柔性部分轴向地对准的部分是能够轴向地传递扭矩的可弯曲部分。它们是“可弯曲的扭矩传递部分”。
在示例性实施方案中,端部执行器组件810包括中心扭矩传递部分861,所述中心扭矩传递部分861将施加到所述部分的一个端部的扭矩传递到所述部分的另一个端部。在一些实施方案中,扭矩缆线861的设置在端部执行器组件810内的部分在图8A至图8B中由短划线示出。在一些实施方案中,中心扭矩传递部分861包括一个或多个可弯曲部分(其中,在一些实施方案中,可弯曲部分包括扭矩缆线),并且任选地包括一个或多个刚性轴。在一些实施方案中,部分861可在部分位于中空通路823内的部分处弯曲,所述部分与嵌套管状结构区域的柔性区域轴向地对准。例如,在一些实施方案中,中心扭矩传递部分861在轴向部分881和885内是扭矩缆线。在一些实施方案中,中心扭矩传递部分861在轴向部分887内是刚性的(例如,刚性轴)。例如,在一些实施方案中,中心扭矩传递部分861包括联接到部分887的刚性部分的部分881、883和885的可弯曲部分。替代地,在一些实施方案中,刚性部分(例如刚性轴)连接两个可弯曲部分,例如,中心扭矩传递部分861在轴向部分883处是刚性的,例如,部分861包括两个可弯曲部分和两个刚性部分。
在一些实施方案中,中心扭矩传递部分861由保护性护套812覆盖。护套在一些实施方案中形成一条或多条缆线880的支撑结构。在一些实施方案中,护套812具有部分861设置在其中的中空通路。在一些实施方案中,护套中空通路和/或部分861的大小和/或形状被设定成使得中心扭矩传递部分861在护套的中空通路内自由地旋转。
在一些实施方案中,缆线880是在一些实施方案中向端部执行器递送电外科功率的电力供应缆线。在一些实施方案中,针对护套的一个或多个轴向部分,缆线880围绕护套812改变周向位置(例如,围绕护套外侧包绕,例如,沿循螺旋路径)。例如,如图8A所示,对于轴向部分881、883和885,缆线880围绕护套812包绕(其中缆线880的不可见部分由点划线指示)。在一些实施方案中,对于近侧轴向部分887,缆线880在护套812上维持固定周向位置。
图8B示出护套812和缆线880的替代实施方案,在多个轴向部分(例如,与机械臂的柔性部分轴向地对准的部分891和895)的情况下,缆线880围绕护套812改变周向位置(例如,围绕护套的外侧包绕,例如,沿循螺旋路径)。在多个轴向部分(例如,与机械臂的刚性部分轴向地对准的部分893和897)的情况下,缆线880在护套812上维持固定周向位置。
示例性电力供应缆线连接部
图9A至图9C是根据本发明的一些实施方案的电力供应缆线980的电连接部902的实施方案的简化视图。
在一些实施方案中,电力供应缆线980从电机单元处的连接部传递电力,所述电机单元被配置为将机械臂致动到机械臂,例如,包括如美国专利申请号15/501,862和/或美国专利申请号15/915,235中描述和/或示出的一个或多个特征,所述申请如同在本文中完整阐述一般以引用方式整体并入本文。
在一些实施方案中,通过将连接到缆线980的近侧端部的连接器卷曲到滑环904上的突出部上,电力供应缆线980由连接部902连接到滑环904。在一些实施方案中,滑环904联接到一个或多个电刷(未示出),所述电刷向滑环904递送电力供应源。
替代地或另外,在一些实施方案中,电力供应缆线980通过弹性部件连接到滑环904。在一些实施方案中,滑环包括电连接到缆线980的半圆形弹簧插入其中的凹穴。凹穴和弹簧的大小和/或形状被设定成使得弹簧弹性地压缩在凹穴内,弹力潜在地作用来使弹簧与滑环保持接触和/或在其内保持在适当位置。
在一些实施方案中,电力供应缆线980和/或滑环904联接到管状结构914,所述管状结构914旋转联接到管状结构的端部执行器,例如,包括如关于管状结构714、电力供应缆线780和端部执行器710(图7B)描述和/或示出的一个或多个特征。
在一些实施方案中,联接到齿轮906的致动器致动齿轮和联接到齿轮的元件(例如,管状结构914和/或轴908和/或缆线980和/或滑环904)的旋转。
在一些实施方案中,轴908提供被配置为支撑缆线980的部分的表面。在一些实施方案中,例如,如图9A所示,电力供应缆线980的一个或多个另外的长度沿着管状结构914的长度的一部分设置,其中,在一些实施方案中,另外的长度是大于一定长度的缆线长度:缆线980需要所述一定长度来横穿路线(例如,沿着支撑结构,例如,712、782(图7D))以电连接滑环904与臂由缆线电气化的一部分。在一些实施方案中,电力供应缆线的另外的长度设置在齿轮906与滑环904之间。
在一些实施方案中,缆线的另外的长度围绕轴908包绕,例如,如图9A所示。缆线的另外的长度潜在地实现例如在缆线的一部分损坏的情况下的所述部分的移除和/或替换和/或连接部的移除和/或替换,其中,例如,在一些实施方案中,围绕轴包绕的另外的长度的缆线例如从轴解包(例如,从图9A所示的状态转换到图9B所示的状态),从而使得能够在缩短缆线的同时维持滑环904与臂(例如,臂端部执行器)之间的电连接。
例如,在一些实施方案中,如果缆线980例如在臂的带电部分(例如,端部执行器)处的电连接出现故障,则缆线(在一些实施方案中,连接部)例如通过移除缆线的远侧端部部分进行替换,从而使用了缆线的近侧端部处(例如,齿轮906与滑环904之间)的另外的缆线长度。
在一些实施方案中,覆盖件910保护缆线980的部分,例如,设置在齿轮906与滑环904之间的部分。覆盖件的潜在益处是保护齿轮与滑环906之间的缆线980和/或防止其缠结。
示例性控制缆线的示例性致动
在一些实施方案中,机械臂的一个或多个关节的屈曲通过改变联接到臂的一条或多条缆线上的张力来控制(例如,如本文档的“相关申请”部分中所列的文档中示出和/或描述的)。在示例性实施方案中,两条缆线联接到每个关节,其中屈曲通过在释放缆线中的一者中的张力的同时增大另一个缆线中的张力来控制。
在一些实施方案中,缆线中的张力通过移动缆线的近侧端部的位置来改变。在一些实施方案中,每条缆线在机械臂的近侧端部处连接到电机单元处的滑块,其中滑块通过电机单元的致动器线性地移动,其中致动和/或电机单元包括如美国专利申请号15/501,862中描述和/或示出的一个或多个特征,所述专利申请以引用方式整体并入本文。
图10A是根据本发明的一些实施方案的外科机械臂致动器1000的简化示意图。
图10B是根据本发明的一些实施方案的外科机械臂致动器1000的简化分解视图。
在一些实施方案中,图10B是图10A所示外科机械致动器的分解图示。
在一些实施方案中,联接到齿轮1002的一个或多个电机(未示出)被配置为旋转齿轮(例如,通过与齿轮1002接触的另一齿轮联接)。在一些实施方案中,齿轮1002连接到轴1004,所述轴1004包括螺纹部1006并且通过齿轮的旋转而旋转。在一些实施方案中,一个或多个滑块1008、1010联接到轴,所述滑块包括螺纹部1012,所述螺纹部1012被配置成使得轴螺纹部1006的旋转产生滑块相对于轴1004的长轴的线性移动。在一些实施方案中,一条或多条控制缆线(未示出)附接到每个滑块1008、1010,其中线性移动改变缆线上的张力。在一些实施方案中,连接到滑块的一条或多条缆线朝远侧连接到外科机械臂的一个或多个部分;张力的改变致动臂的一个或多个接合部的屈曲。在一些实施方案中,滑块和/或轴的螺纹部被配置为在齿轮1002旋转时使第一滑块1008沿相反方向线性地移动到第二滑块。在示例性实施方案中,每个滑块对致动单个铰接臂柔性部分的屈曲。
图10C是根据本发明的一些实施方案的附接到齿轮滑块1008的缆线终端部分1014的简化示意图。
在一些实施方案中,一条或多条缆线通过缆线终端部分1014连接到滑块,其中在一些实施方案中,缆线终端部分的大小和/或形状被设定成通过滑块中的凹入部1022固持在适当位置。例如,在示例性实施方案中,缆线终端部分包括配合到凹入部1022中的较宽部分1024和固持在滑块中的狭槽内的较窄部分1016,其中狭槽窄于缆线终端部分的较宽部分1024。在一些实施方案中,螺钉(未示出)旋拧到孔1020(其中孔1020任选地为螺纹孔)中,螺钉的头部与缆线终端部分1014重叠。
在一些实施方案中,一条或多条缆线(并且在示例性实施方案中为一条)(缆线未示出)附接到缆线终端部分1014。例如,通过型锻缆线的近侧部分放置在缆线终端部分1014内的凹穴1018中的位置,向终端部分施加压力以使围绕缆线的凹穴1018变窄。
图11是根据本发明的一些实施方案的外科机械臂致动器1100的简化剖视图。在一些实施方案中,致动器1100包括如关于致动器1000(图10A至图10B)描述和/或示出的一个或多个特征。
在一些实施方案中,外科机械臂致动器的滑块1108、1110具有不同尺寸。在示例性实施方案中,第一滑块1108的厚度1150不同于第二滑块1110的厚度1152。例如,在一些实施方案中,第一滑块厚度1150比第二滑块厚度1152小例如1%-50%或1%-30%或5%-30%或15-30%或约25%或者更低或更高或中间范围或百分比。在一些实施方案中,第一滑块1108的环面的扇区角1156小于第二滑块1110的环面的扇区角1158,其中在一些实施方案中,滑块的环面具有相同的内径和外径,例如,其中第一滑块扇区角1156是第二滑块扇区角1158的50%-98%或60%-95%或70%-85%或者更低或更高或中间范围或百分比。
在一些实施方案中,滑块相对于轴1104轴向地移动,并且通过轨道1126、1128在管状结构1154内固持在适当位置。
在一些实施方案中,轨道1126、1128的部分被配置用于不同厚度和/或扇区角的滑块。潜在地,将准确制造致动器简化为:在轨道定位以后,针对不同滑块,以不同方式设定用于每个滑块的凹穴的大小和/或形状。
示例性制造方法
图12是根据本发明的一些实施方案的制造机械铰接臂的方法的流程图。
在一些实施方案中,使制造方法的一个或多个部分自动化,例如,使制造的至少一部分机器人式自动化。替代地或另外,在一些实施方案中,制造是手动的和/或包括手动部分。
在1200处,在一些实施方案中,选择多个管。在一些实施方案中,例如,针对具体应用,选择管的尺寸。在一些实施方案中,例如,选择臂的最大剖面尺寸和/或选择最外侧管状结构剖面尺寸,并且通过所选尺寸和任选地控制缆线数目和/或剖面尺寸确定内管尺寸。
在一些实施方案中,选择一个或多个管的大小和/或壁厚度以向管状结构提供(例如,用于应用的)足够强度。在一些实施方案中,选择一个或多个管的大小和/或壁厚度以基于一条或多条控制缆线的给定大小(例如剖面尺寸)来向管状结构提供足够的强度,以用于控制外科机械臂的一部分。在一些实施方案中,基于所需强度和/或大小来选择控制缆线。
例如,在一些实施方案中,一个或多个管具有恒定内径和/或外径。在一些实施方案中,一个或多个管具有沿着管的长度改变(例如,渐缩)的尺寸。
在1202处,在一些实施方案中,例如通过切割和/或焊接例如一个或多个管来制备一个或多个管状结构。
在一些实施方案中,管状结构的制备包括在管内切割一个或多个沟槽,其中在一些实施方案中,沟槽通过部分地切穿管的壁来形成。
在一些实施方案中,由管研磨沟槽,所述管例如在一些实施方案中是在管长度上和/或在管剖面上具有均匀壁厚度的管。
在示例性实施方案中,在管(例如,在包括三个管的一个实施方案中,针对最外侧管和中间管)中切割出彼此相背对的两个沟槽。在一些实施方案中,将两个沟槽切割成使得管剖面在两个沟槽之间沿两个顺时针方向的周长是相等的。在一些实施方案中,使沟槽彼此沿直径相背对地定位,使得弧长(沿着管的周长)是相等的。在一些实施方案中,一个或多个沟槽(例如,针对两个沟槽中的两者,其中管具有两个沟槽)的沟槽尺寸大致相同,例如,为相同的长度和/或宽度和/或深度和/或剖面面积。
在示例性实施方案中,在同一时间研磨管状结构的多于一个沟槽(例如,所有沟槽),例如,其中同时研磨多于一个沟槽的相同轴向部分。
在一些实施方案中,管状结构的制备包括将覆盖件附接到沟槽,例如,将覆盖件附接到每个沟槽。在一些实施方案中,在沟槽之上将覆盖件焊接在适当位置。在一些实施方案中,将覆盖件定位成使得覆盖件不从管的表面突出。例如,在一些实施方案中,将覆盖件附接在沟槽内,其中,例如,将覆盖件的边缘附接到沟槽的壁。
在一些实施方案中,管状结构的制备包括对管的部分进行激光切割,在一些实施方案中,之后是管状结构沟槽的切割和/或覆盖,其中在一些实施方案中,切割每个管状结构以提供至少一个可弯曲扭矩传递部分和任选地例如可在单个平面中弯曲的柔性区段。
在一些实施方案中,管状结构的制备包括将一条或多条控制缆线插入沟槽中。在一些实施方案中,将控制缆线插入每个沟槽中。在一些实施方案中,缆线足够坚硬,以使其例如从沟槽中在管状结构的端部处的开口推动通过沟槽的至少一部分。在一些实施方案中,夹具用于缆线插入,夹具例如包括用于固持管状结构和/或缆线的支撑件(例如,机械结构支撑件)中的一者或多者。
在示例性实施方案中,制备三个管状结构。在一些实施方案中,三个管状结构包括如关于管状结构428、426、424(图4A至图4B)和/或828、826、824(图8A)示出和/或描述的一个或多个特征。
在一些实施方案中,将端部执行器附接到管状结构。在示例性实施方案中,将端部执行器附接到最小直径(最内侧)管状结构。在一些实施方案中,将包括端部执行器的端部执行器结构、用于致动端部执行器的缆线和任选地电力供应缆线联接到最内侧管状结构。
在1204处,在一些实施方案中,将管状结构嵌套在彼此之内,例如,结构包括如管状结构424、426、428(图4A至图4B)和/或828、826、824(图8A)描述和/或示出的一个或多个特征。
在一些实施方案中,嵌套多于两个管状结构,例如3-10个。在示例性实施方案中,嵌套3个管状结构,第一管状结构定位在第二管状结构内,其中第二管状结构定位在第三管状结构内。任选地,在一些实施方案中,使管状结构通过一个或多个部件和/或连接器彼此联接。在一些实施方案中,一个或多个联接防止管状结构相对于彼此例如沿轴向方向和/或沿径向方向移动。在一些实施方案中,机械臂包括一个或多个轴承,其中轴承在一些实施方案中防止两个管状结构之间的轴向移动,而在一些实施方案中允许管状结构中的一个或多个独立地围绕管状结构长轴旋转。
在一些实施方案中,使管状结构通过结构的近侧端部的连接而联接。例如,在一些实施方案中,外科机械臂包括在一些实施方案中固持每个管状结构的近侧部分的柄部组件。在一些实施方案中,柄部组件防止管状结构相对于彼此轴向移动。
在1206处,在一些实施方案中,将机械臂连接到一个或多个致动器。
在1208处,在一些实施方案中,覆盖机械臂的至少一部分。例如,通过一个或多个电绝缘和/或不透水覆盖件。在一些实施方案中,对外科机械臂进行消毒。
在1210处,在一些实施方案中,对机械臂进行校准。例如,通过将机械臂联接到电机单元,其中臂的移动由控制器控制,校准涉及例如使用控制器命令臂移动、测量臂的移动以及将所命令的移动与实际移动对准。在一些实施方案中,使用包括控制器联接到的电机单元的专用夹具来对机械臂进行校准。
图13是根据本发明的一些实施方案的制造铰接机械臂的详细方法的流程图。
在一些实施方案中,图13的矩形元件指示部件,并且细长六边形元件指示流程图的步骤。
在一些实施方案中,制备铰接臂的管状结构,例如,其中制备包括如关于步骤1202(图12)所述的一个或多个特征。
示例性肩肘组件构造
在1300处,在一些实施方案中,提供肩管(本文也称为“最外侧管”)。
在1302处,在一些实施方案中,在肩管中研磨出沟槽。
在1304处,在一些实施方案中,焊接(例如,激光焊接)覆盖件以覆盖沟槽(其中覆盖件为薄材料带,例如,垫片带1306)。
在1308处,在一些实施方案中,对肩管状结构(本文也称为“最外侧管状结构”)进行激光标刻。
在1310处,在一些实施方案中,在肩管状结构中激光切割出可弯曲和/或柔性部分,其中,在一些实施方案中,切割是使用激光标刻的。在示例性实施方案中,肩管状结构的切割包括切割单个柔性部分。
在1312处,在一些实施方案中,肩近侧连接器1314(例如,通过焊接)连接到肩管的近侧部分(例如,近侧端部),其中肩近侧连接器在一些实施方案中被配置为配合在柄部组件内。
在一些实施方案中,激光标刻、激光切割和焊接中的一者或多者是使用相同激光器和/或相同类型的激光器执行的。
在1316处,在一些实施方案中,定位一个或多个致动缆线,其中,在一些实施方案中,将致动缆线插入肩管状结构的每个沟槽中。在一些实施方案中,将致动缆线1318型锻到终端1320上,例如,使每个致动缆线在缆线的近侧和/或远侧端部处型锻到终端。其中在一些实施方案中型锻涉及将缆线的一部分(例如,缆线的端部)插入终端中的入口中,并且然后压缩终端以附接零件。
在1322处,在一些实施方案中,附接致动缆线终端(例如,通过焊接在适当位置)。在一些实施方案中,使每个致动缆线在远侧端部处焊接到机械臂的一部分的适当位置和/或在缆线的近侧端部处焊接到致动器滑块的适当位置(例如,滑块和/或终端包括如关于图10A至图10C和/或图11描述和/或示出的一个或多个特征)。
在1324处,在一些实施方案中,提供肘管(本文也称为“中间管”)。
在1326处,在一些实施方案中,在肘管中研磨出沟槽。
在1328处,在一些实施方案中,焊接(例如,激光焊接)覆盖件1330以覆盖沟槽(其中覆盖件包括例如具有宽于材料主体的端部的一个或多个薄材料带,本文称为“狗骨状垫片带”)。
在1332处,在一些实施方案中,对肘管状结构(本文也称为“中间管状结构”)进行激光标刻。
在1334处,在一些实施方案中,在肘管状结构中激光切割出可弯曲和/或柔性部分。在示例性实施方案中,切割出柔性部分和可弯曲扭矩传递部分,其中在一些实施方案中,刚性部分(例如,未切割部分)设置在肘管状结构中的柔性部分与可弯曲部分之间。
在1336处,在一些实施方案中,将肩肘承终端焊接到肘管状结构。其中,在一些实施方案中,肩肘承终端是肘管状结构上将凹入部配合在肩轴承中的突出部,例如,包括如关于图14D示出和/或描述的一个或多个特征。
在1338处,在一些实施方案中,定位致动缆线,其中,在一些实施方案中,将致动缆线插入肘管状结构的每个沟槽中。在一些实施方案中,例如使用如关于步骤1316描述的一个或多个特征将致动缆线1318和致动缆线型锻到终端1320。
在1340处,在一些实施方案中,连接致动缆线。在一些实施方案中,使每个致动缆线在远侧端部处焊接到机械臂的一部分的适当位置和/或在缆线的近侧端部处焊接到致动器滑块的适当位置(例如,滑块和/或终端包括如关于图10A至图10C和/或图11描述和/或示出的一个或多个特征)。
在1344处,在一些实施方案中,将肘管状结构插入肩管状结构中(嵌套在其内),并且使用轴承1342来联接管状结构,其中,在一些实施方案中,轴承1342防止管状结构相对于彼此轴向移动和/或允许管状结构中的一者或两者相对于另一个管状结构旋转。联接的管状结构在本文称为“肩肘组件”。
在1303处,在一些实施方案中,对肩肘组件执行钝化过程,例如,柠檬酸钝化(例如,柠檬酸钝化ASTM-A-967)。
在1305处,在一些实施方案中,对肩肘组件的部分进行清洁和/或脱脂。
示例性腕夹持器组件
在一些实施方案中,腕夹持器组件包括端部执行器(其在一些实施方案中为夹持器)、联接到端部执行器的腕管状结构(本文也称为“最内侧管状结构”)以及最内侧扭矩传递组件。其中,在一些实施方案中,最内侧扭矩传递组件将扭矩传递到端部执行器以致动端部执行器(例如,以打开和/或闭合夹持器)。在一些实施方案中,腕管围绕腕管长轴的旋转使端部执行器旋转。在一些实施方案中,最内侧扭矩传递组件包括一条或多条电力供应缆线和/或一个或多个保护套管。
在1366处,在一些实施方案中,提供腕管(本文也称为“最内侧管”)。
在1368处,在一些实施方案中,对腕管进行激光标刻。
在1370处,在一些实施方案中,对腕管的一个或多个部分进行激光切割以形成接合部,以构造腕管状结构(本文也称为“最内侧管状结构”)。在示例性实施方案中,在腕管中切割出第一可弯曲扭矩传递部分和第二可弯曲扭矩传递部分,在一些实施方案中,其间具有刚性(例如,未切割)部分。
在1372处,在一些实施方案中,对腕管状结构组件执行钝化过程,例如,柠檬酸钝化(例如,柠檬酸钝化ASTM-A-967)。
在1374处,在一些实施方案中,对腕管状结构进行清洁和/或脱脂。
在1346处,在一些实施方案中,提供扭矩耦合器和/或夹持器螺杆轴承。
在1348处,在一些实施方案中,提供扭矩缆线和/或扭矩缆线保护套管。
在1350处,在一些实施方案中,提供扭矩轴和/或扭矩轴保护套管。
在一些实施方案中,将扭矩轴插入扭矩轴保护套管(本文也称为“支撑结构”)中。
在一些实施方案中,将扭矩缆线插入扭矩缆线保护套管(本文也称为“支撑结构”)中。
在1354处,在一些实施方案中,提供夹持器致动螺杆。
在1356处,在一些实施方案中,对夹持器致动螺杆进行处理,例如,热处理(例如,17-4PH H900热处理)。
在1352处,在一些实施方案中,将扭矩轴联接到扭矩缆线(例如,通过型锻,任选地使用终端)。在一些实施方案中,使夹持器致动螺杆通过夹持器螺杆轴承例如通过型锻联接到扭矩缆线。
在1358处,在一些实施方案中,对连接的零件(扭矩轴、扭矩缆线、夹持器致动螺杆、保护套管)中的一者或多者进行清洁和/或脱脂。
在1360处,在一些实施方案中,提供夹持器压力接触板、双极绝缘板、包括夹持器齿状物(本文称为“咬合件”)的部分和1.3mm销中的一者或多者。
在1362处,在一些实施方案中,提供O形环和电力供应缆线。
在1364处,在一些实施方案中,对步骤1360和/或1362中提供的零件中的一者或多者进行清洁和/或脱脂。
在1376处,在一些实施方案中,提供固定钳口部分和单极尖端。
在1378处,在一些实施方案中,将单极尖端焊接到固定钳口部分。
在1380处,在一些实施方案中,对排除单极尖端的固定钳口部分执行钝化过程,例如,柠檬酸钝化(例如,柠檬酸钝化ASTM-A-967)。
在1382处,用绝缘体部分地涂覆固定钳口部分,例如,用聚对二甲苯涂覆。在一些实施方案中,涂覆使用气相沉积来施加。在一些实施方案中,用缓冲液保护未涂覆的部分,所述缓冲液然后在涂覆过程之后进行移除。
在1384处,在一些实施方案中,对固定钳口部分和/或单极尖端进行清洁和/或脱脂。
在1386处,在一些实施方案中,提供动态钳口部分。
在1388处,在一些实施方案中,对动态钳口部分进行激光标刻。
在1390处,在一些实施方案中,对动态钳口部分执行钝化过程,例如,柠檬酸钝化(例如,柠檬酸钝化ASTM-A-967)。
在1392处,用绝缘体部分地涂覆动态钳口部分,例如,用聚对二甲苯涂覆。在一些实施方案中,涂覆使用气相沉积来施加。在一些实施方案中,用缓冲液保护未涂覆的部分,所述缓冲液然后在涂覆过程之后进行移除。
在1394处,在一些实施方案中,通过一个或多个销1396联接动态钳口部分和固定钳口部分。在一些实施方案中,联接到扭矩螺杆的滑块例如通过影响动态钳口部分围绕销的旋转来致动工具钳口的打开和/或闭合。致动例如包括如美国专利申请号15/915,237中描述和/或示出的一个或多个特征,所述专利申请以引用方式整体并入本文。
在1398处,在一些实施方案中,对动态钳口部分零件进行清洁和/或脱脂。
在1301处,在一些实施方案中,通过以下中的一者或多者来构造腕夹持器组件:
将(步骤1362中提供的)电力供应缆线联接到扭矩轴支撑结构和扭矩缆线支撑结构。
将电力供应缆线电连接到钳口部分中的一个,例如,电连接到单极电外科尖端;
将连接的零件(例如,扭矩轴、扭矩缆线、夹持器致动螺杆、支撑结构中的一者或多者)插入腕管状结构中;以及
在腕夹持器组件的远侧端部处配合O形环,O形环潜在地将臂(例如,臂的中空部分)与工具处的流体和/或其他碎屑(例如,外科碎屑)封离。
在一些实施方案中,在1307处,将夹持器组件插入肩肘组件中(例如,嵌套于其内)。在一些实施方案中,将夹持器组件的可弯曲部分与肩肘组件的柔性部分对准。在一些实施方案中,通过腕轴承联接夹持器组件和肩组件。
在1309处,在一些实施方案中,提供肩致动器组件零件,所述零件例如包括肩致动器螺杆、肩弯曲螺母、肩矫直螺母、螺母紧固螺钉、肩致动器壳体零件、肩致动器弹簧和用于肩弹簧的垫圈中的一者或多者。
在1311处,在一些实施方案中,对步骤1309中提供的一个或多个零件进行清洁和/或脱脂。
在1313处,在一些实施方案中,例如使用步骤1311中提供的零件来组装肩致动器组件。在一些实施方案中,将肩致动器组件联接到肩管状结构,联接将肩致动器组件配置为致动肩管的旋转和/或肩接合部的屈曲。
在1315处,在一些实施方案中,提供肘致动器组件零件,所述零件例如包括肘致动器螺杆、肘弯曲螺母、肘矫直螺母、螺母紧固螺钉、肘致动器壳体零件、肘致动器弹簧中的一者或多者。
在1317处,在一些实施方案中,对步骤1315中提供的一个或多个零件进行清洁和/或脱脂。
在1319处,在一些实施方案中,例如使用步骤1315中提供的零件来组装肘致动器组件。在一些实施方案中,将肘致动器组件联接到肘管状结构,联接将肘致动器组件配置为致动肘管的旋转和/或肘接合部的屈曲。
在1321处,在一些实施方案中,提供滑环组件零件,所述零件例如包括腕齿轮、单极滑环、双极滑环和夹头中的一者或多者。
在1323处,在一些实施方案中,对步骤1321中提供的一个或多个零件进行清洁和/或脱脂。
在1325处,在一些实施方案中,例如使用步骤1321中提供的零件来组装滑环组件。在一些实施方案中,将滑环组件联接到内管状结构并且将电力供应缆线电连接到滑环中的一个。
在1327处,在一些实施方案中,提供臂保护组件的零件,零件包括例如一个或多个套管和/或收缩包裹1329(例如电绝缘收缩包裹,例如聚酯收缩包裹)。
在1331处,在一些实施方案中,对步骤1327中提供的零件中的一者或多者进行清洁和/或脱脂。
在1333处,在一些实施方案中,例如使用步骤1327中提供的零件来组装臂保护组件。在一些实施方案中,例如通过将臂的部分放置到套管和/或收缩包裹中,将步骤1327中提供的零件连接到铰接臂。
在一些实施方案中,由然后配合到臂(例如,通过热处理)的收缩包裹套管覆盖臂的在一些实施方案中包括仅刚性部分的近侧部分。在一些实施方案中,将臂的在一些实施方案中包括柔性部分的远侧部分放置在大小和/或形状被设定成配合其所设置在的臂部分的弹性硅橡胶套管内。在一些实施方案中,一个或多个轴承允许臂的一个或多个部分相对于套管进行旋转。例如,在示例性实施方案中,臂的远侧端部处的轴承隔开硅橡胶套管与工具,例如,从而实现工具在套管内的旋转。在一些实施方案中,由另外的套管覆盖硅橡胶套管,所述另外的套管在一些实施方案中是收缩包裹,所述收缩包裹被处理来将收缩包裹配合到下面的臂和/或硅套管结构。
在1335处,在一些实施方案中,提供臂柄部组件的零件,例如,包括柄部零件中的一者或多者。其中,在一些实施方案中,柄部零件包括以下中的一者或多者;固持臂和/或臂的单独部分的部分;大小和/或形状被设定成提供供用户用来操纵臂的柄部的突出部。
在1337处,在一些实施方案中,对步骤1335中提供的零件中的一者或多者进行清洁和/或脱脂。
在1339处,在一些实施方案中,例如使用步骤1335中提供的零件来组装臂柄部组件,其中,在一些实施方案中,组装柄部组件将柄部组件联接到臂的近侧部分。在一些实施方案中,将柄部组件联接到臂的包括臂致动器的一部分。在一些实施方案中,接着将臂柄部组件联接到铰接臂的近侧部分。在一些实施方案中,由塑料和/或电绝缘材料构造柄部组件的一个或多个部分(例如,柄部和/或其他部分)。
在1351处,在一些实施方案中,提供用于臂包装的零件,例如,包括冲切卡和无菌袋中的一者或多者。在一些实施方案中,折叠冲切卡的部分以形成臂固持器,将臂定位在一个或多个切卡(例如,冲切卡)上,并且折叠和/或连接冲切卡的部分以将臂固持在卡上的适当位置。
在1341处,将臂(例如,附接到冲切卡)插入无菌袋中。
在1343处,在一些实施方案中,对包装臂(例如,在无菌袋)进行消毒。
在1347处,在一些实施方案中,提供臂单元盒包装零件,例如,硬纸板盒、保护泡沫、装置标签中的一者或多者。
在1345处,在一些实施方案中,例如使用步骤1347中提供的零件来构造臂单元盒包装。
在1349处,在一些实施方案中,将包装消毒臂放置到臂单元盒包装中。
示例性轴承
图14A是根据本发明的一些实施方案的外科机械臂的一部分的简化示意图。
在一些实施方案中,外科机械臂包括腕轴承1402,本文也称为内-中间管状结构轴承。在一些实施方案中,轴承1402实现内管状结构(其在一些实施方案中联接到工具)和中间管状结构中的一者或两者的独立旋转。在一些实施方案中,轴承1402防止管状结构相对于彼此轴向移动。
在一些实施方案中,外科机械臂包括肩轴承1406,本文也称为中间-外管状结构轴承。在一些实施方案中,第一柔性部分1402连接轴承1402、1406。在一些实施方案中,轴承1406实现外管状结构和中间管状结构中的一者或两者的独立旋转。在一些实施方案中,轴承1406防止管状结构相对于彼此轴向移动。
在一些实施方案中,轴承1402、1406中的一者或两者例如用油脂(例如,生物相容性油脂)密封,其中零件之间的油脂和/或闭合配件密封轴承和/或臂(例如,臂的中空部分)。
图14B是根据本发明的一些实施方案的包括工具1410和腕轴承1402的外科机械臂的远侧部分的简化示意图。
图14C是根据本发明的一些实施方案的腕轴承1402的简化示意图。在一些实施方案中,图14C的腕轴承是图14B和/或图14A的腕轴承的放大线框图。
在一些实施方案中,轴承1402包括连接内管状结构和中间管状结构的连接器。例如,在一些实施方案中,轴承包括放置到轴承壳体中的中空通路1408中的销1412。在一些实施方案中,销1412和/或中空通路1408的大小和/或形状针对销设定成紧密地配合在中空通路内,例如,潜在地将销固持在通路内。
图14D是根据本发明的一些实施方案的肩轴承1406的简化示意性剖面。
在一些实施方案中,轴承1406包括安装在中间管状结构1414上的突出部1418(在本文档内也称为“轴承终端”)。在一些实施方案中,突出部例如通过焊接附接到中间管状结构1414。
在一些实施方案中,轴承1406包括在一些实施方案中例如通过焊接附接到外管状结构1415的连接器1420。在一些实施方案中,连接器1420包括大小和/或形状被设定成接收突出部1418的凹陷部。
示例性尺寸
在一些实施方案中,外管状结构(例如,428(图4A至图4B)、528(图5A))的外径为1mm-20mm或5mm-10mm或约8mm或者更低或更高或中间范围或直径。在一些实施方案中,外管状结构的内径为1mm-15mm或2mm-10mm或5mm-7mm或约6mm或者更低或更高或中间范围或直径。在一些实施方案中,外管状结构的壁的厚度为0.1mm-2mm或0.5mm-1.5mm或约0.9mm或者更低或更高或中间范围或厚度。
在一些实施方案中,中间管状结构(例如,426(图4A至图4B)、526(图5A))的外径为1mm-10mm或3mm-7mm或约5.5mm或者更低或更高或中间范围或直径。在一些实施方案中,中间管状结构的内径为约1mm-10mm或2mm-6mm或约4mm或者更低或更高或中间范围或直径。在一些实施方案中,中间管状结构的壁的厚度为0.1mm-2mm或0.5mm-1.5mm或约0.89mm或者更低或更高或中间范围或厚度。
在一些实施方案中,内管状结构(例如,424(图4A至图4B)、524(图5A))的外径为1mm-7mm或2mm-5mm或约3.5mm或者更低或更高或中间范围或直径。在一些实施方案中,内管状结构的内径为1mm-5mm或2mm-3mm或约2.7mm或者更低或更高或中间范围或直径。在一些实施方案中,内管状结构的壁的厚度为0.1mm-1mm或0.2mm-0.6mm或约0.4mm或者更低或更高或中间范围或厚度。
在一些实施方案中,铰接臂的总长度为50cm-200cm或100m-200m或100cm-150cm或约130cm或者更低或更高或中间范围或长度。在一些实施方案中,臂的柔性部分的总长度为5cm-30cm或10cm-30cm或约20cm长或者更低或更高或中间范围或长度。在一些实施方案中,铰接臂的柔性的长度的百分比为1%-30%或5%-20%或约15%或者更低或更高或中间范围或百分比。
概要
可以预期,在本申请的专利权有效期内,将开发许多相关的外科机械工具,并且术语“外科机械工具”的范围意图事先包括所有此类新技术。
如本文所用,术语“约”是指±20%
术语“包含(comprises)”、“包含(comprising)”、“包括(includes)”、“包括(including)”、“具有(having)”以及它们的变化形式意指“包括但不限于”。
术语“由……组成”意指“包括并限于”。
术语“基本上由……组成”意指组合物、方法或结构可包括另外的成分、步骤和/或部件,但仅在另外的成分、步骤和/或部件未实质性改变所要求的组合物、方法或结构的基本特征和新颖特征的情况下如此。
除非上下文另外明确指出,否则如本文所用,单数形式“一个(种)”和“所述”包括多个指示物。例如,术语“化合物”或“至少一种化合物”可以包括多种化合物,包括其混合物。
在本申请中,本发明的各种实施方案可以范围格式呈现。应理解,呈范围格式的描述仅为了方便和简洁起见,并且不应解释为对本发明的范围进行不可改变的限制。因此,对范围的描述应被认为已经确切地公开所有可能的子范围以及该范围内的单独数值。例如,诸如从1到6的范围的描述应视为已确切地公开了子范围,诸如从1到3、从1到4、从1到5、从2到4、从2到6、从3到6等,以及该范围内的单个数字,例如1、2、3、4、5和6。此在任何宽度范围的条件下均适用。
每当在本文中指示数值范围时,意味着包括所指示范围内的任何引用的数值(分数或整数)。短语第一指示数字与第二指示数字“之间的范围/范围(ranging/rangesbetween)”以及“从”第一指示数字“到”第二指示数字的“范围/范围(ranging/ranges)”在本文中可互换使用并且意指包括第一指示数字和第二指示数字以及它们之间的所有分数和整数。
如本文所用,术语“方法”是指用于完成给定任务的方式、手段、技术和程序,其包括但不限于已知的方式、手段、技术和程序或者化学、药理学、生物学、生物化学和医学领域的从业者从已知的方式、手段、技术和程序很容易地开发的方式、手段、技术和程序。
如本文所用,术语“治疗”包括消除、基本上抑制、减慢或逆转病状的进展、基本上改善病状的临床或美学症状或基本上防止病状的临床或美学症状的出现。
应了解,为清楚起见而在单独实施方案的上下文中描述的本发明的某些特征也可以组合的形式在单个实施方案中提供。相反地,为简洁起见而在单个实施方案的上下文中描述的本发明的各种特征也可单独地或以任何合适的子组合的形式提供或在适当情况下提供于本发明的任何其他描述实施方案中。在不同实施方案的上下文中描述的某些特征不应被认为是那些实施方案的基本特征,除非实施方案在没有那些元件的情况下是无效的。
尽管已经结合本发明的具体实施方案描述了本发明,但是明显的是,对于本领域技术人员而言,许多替代、修改和变化是显而易见的。因此,意图涵盖落入所附权利要求的精神和广泛范围内的所有此类替代、修改和变化。
本说明书中所提及的所有公布、专利以及专利申请在本文中以引用方式整体并入本说明书中,达到如同每一个单独的公布、专利或专利申请被专门地并且单独地指示以引用方式并入本文的相同的程度。此外,本申请中对任何参考的引用或标明不应当解释为承认此类参考可用作本发明的现有技术。就使用段落标题方面而言,它们不应解释为必然是限制性的。
此外,本专利的任何一个或多个优先权文档据此以引用方式整体并入本文。
- 外科铰接臂
- 铰接臂机械手的装置和确定铰接臂机械手的端部执行器的支架的位置的方法