串联双电机动力系统
文献发布时间:2023-06-19 10:21:15
技术领域
本发明涉及动力系统技术领域,特别涉及一种串联双电机动力系统。
背景技术
现有的纯电动工程机械、装载机、重卡、矿卡等行走驱动系统主要有三种:
1、一种采用一个行走电机替换原燃油发动机与原燃油车上变矩器或变速箱总成直接组合,该系统技术难度低,但由于变矩器或变速箱效率较低,这种技术路线的能耗高,整机续航能力差。
2、一种采用取消变矩器和变速箱,一个行走电机直接连接带有双输出口的分动箱或专用变速器,这种技术路线较第一种系统安装布置简单、可靠,能耗有所降低,但是该结构具有传动效率低、可靠性不高、能耗大等缺点。
3、一种行走驱动采用双电机,前后桥电机、前后齿轮箱分别通过传动轴与前后桥相连,这种技术路线可以实现在某些工况下前桥电机或后桥电机成停机状态,降低整机的能耗,提高续航能力(如实用新型专利ZL202020217991.X公开的一种纯电动装载机的传动系统),但当某种工况前轮或后轮打滑时将出现动力不足问题。
发明内容
本发明的目的在于针对现有技术的上述不足和缺陷,提供一种串联双电机动力系统,以解决上述第一种、第二种单行走电机驱动系统带来的传动效率低、可靠性不高、能耗大等问题,以及上述第三种双行走电机驱动系统的车轮打滑、动力不足问题。
本发明所解决的技术问题可以采用以下技术方案来实现:
串联双电机动力系统,包括前驱动桥、前桥传动轴、前驱动电机、中间连接件、后驱动电机、后桥传动轴、后驱动桥、前驱动电机控制器、后驱动电机控制器、整车控制器,所述前桥传动轴的一端与所述前驱动桥连接,另一端与所述前驱动电机连接,所述后桥传动轴的一端与所述后驱动桥连接,另一端与所述后驱动电机连接,所述中间连接件的两端分别与所述前驱动电机、后驱动电机连接,所述前驱动电机控制器与所述前驱动电机连接,所述后驱动电机控制器与所述后驱动电机连接,所述整车控制器与所述前驱动电机控制器、后驱动电机控制器连接。
在本发明的一个优选实施例中,所述中间连接件包括中间传动轴或花键。
在本发明的一个优选实施例中,所述整车控制器通过CAN通讯为前驱动电机控制器与后驱动电机控制器发送整车需求扭矩指令,前驱动电机控制器控制前驱动电机输出扭矩,后驱动电机控制器控制后驱动电机输出扭矩。
在本发明的一个优选实施例中,所述前驱动电机与后驱动电机在车辆前轮与后轮同时着地时,前驱动电机与后驱动电机同时输出扭矩驱动行走。
在本发明的一个优选实施例中,当整车控制器发出整车需求扭矩指令后,前驱动电机控制器与后驱动电机控制器根据当前电机转速与需求扭矩大小,动态分配前驱动电机与后驱动电机输出扭矩大小,使双电机综合能量转换效率达到最大,从而达到节省整车能耗的目的。
在本发明的一个优选实施例中,当后轮抓地力不足时,后驱动电机通过中间连接件、前驱动电机、前桥传动轴、前驱动桥,把因后轮抓地力不足导致的动力损失补偿给前轮,此时车辆前后轮总输出扭矩不会因后轮抓地力不足而减小。
在本发明的一个优选实施例中,当前轮抓地力不足时,前驱动电机通过中间连接件、后驱动电机、后桥传动轴、后驱动桥,把因前轮抓地力不足导致的动力损失补偿给后轮,此时车辆前后轮总输出扭矩不会因前轮抓地力不足而减小。
在本发明的一个优选实施例中,在车辆后轮悬空时,后驱动电机通过中间连接件、前驱动电机、前桥传动轴、前驱动桥,把因后轮悬空导致的后轮无法传递扭矩全部补偿给前轮,此时车辆前轮输出:前驱动电机的扭矩加上后驱动电机的扭矩,车辆总输出扭矩不会因后轮悬空而减小。
在本发明的一个优选实施例中,在车辆前轮悬空时,前驱动电机通过中间连接件、后驱动电机、后桥传动轴、后驱动桥,把因前轮悬空导致的后轮无法传递扭矩全部补偿给后轮,此时车辆后轮输出:前驱动电机的扭矩加上后驱动电机的扭矩,车辆总输出扭矩不会因前轮悬空而减小。
在本发明的一个优选实施例中,所述整车控制器的控制器算法通过Matlab-simulink进行编程,通过二维查表,根据当前整车控制器请求的扭矩、当前电机转速,查出前驱动电机需要输出的扭矩,后驱动电机的输出扭矩为:总需求扭矩-前驱动电机扭矩,所以可以通过分配前后驱动电机扭矩,提高每个驱动电机的能量转换效率,达到提高整体驱动效率的目的。
由于采用了如上的技术方案,本发明的系统根据整车控制器发出的转矩指令,由主电机控制器进行动力分配,两台电机分别执行;双电机同轴,任一单电机可单独输出给所连驱动桥双倍电机扭矩,具有:扭矩大、动力双输出、高效区间大等特点,额定功率范围覆盖50~300kw。本发明不但解决以往双行走电机不同轴造成的车轮打滑、动力不足问题,而且电机直驱,无变速箱、无减速器等齿轮传动结构,使得系统结构更简单、故障率更低,通过扭矩分配优化效率。
附图说明
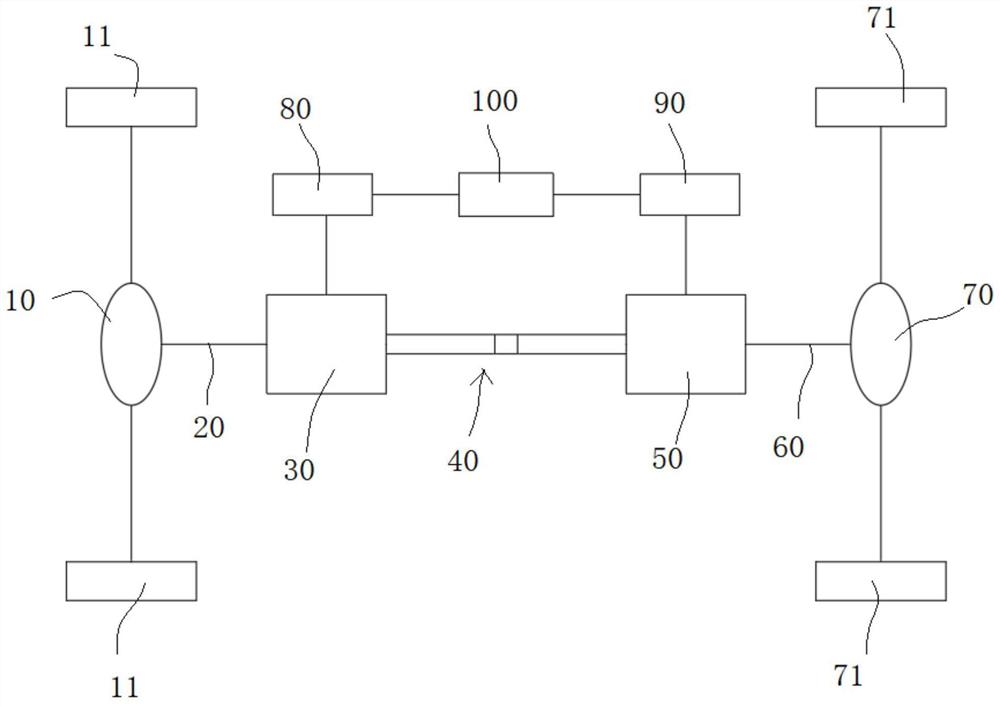
图1是本发明一种实施例的结构示意图。
图2是本发明每个电机驱动系统效率map图。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面进一步阐述本发明。
参见图1所示的一种串联双电机动力系统,包括前驱动桥10、前桥传动轴20、前驱动电机30、中间连接件40、后驱动电机50、后桥传动轴60、后驱动桥70、前驱动电机控制器80、后驱动电机控制器90、整车控制器100。前桥传动轴20的一端与前驱动桥10连接,另一端与前驱动电机30连接。后桥传动轴60的一端与后驱动桥70连接,另一端与后驱动电机50连接。中间连接件40的两端分别与前驱动电机30、后驱动电机50连接,中间连接件40为中间传动轴或花键。前驱动电机控制器80与前驱动电机30连接,后驱动电机控制器90与后驱动电机70连接,整车控制器100与前驱动电机控制器80、后驱动电机控制器90连接。
整车控制器100通过CAN通讯为前驱动电机控制器80与后驱动电机控制器90发送整车需求扭矩指令,前驱动电机控制器80控制前驱动电机30输出扭矩,后驱动电机控制器90控制后驱动电机70输出扭矩。
前驱动电机30与后驱动电机50在装载机前轮11与后轮71同时着地时,前驱动电机30与后驱动电机50同时输出扭矩驱动车辆行走。
当后轮71抓地力不足时,后驱动电机50通过中间传动轴或花键、前驱动电机30、前桥传动轴20、前驱动桥10,把因后轮71抓地力不足导致的动力损失补偿给前轮11。此时车辆前后轮总输出扭矩不会因后轮71抓地力不足而减小。
当前轮11抓地力不足时,前驱动电机30通过中间传动轴或花键、后驱动电机50、后桥传动轴60、后驱动桥70,把因前轮11抓地力不足导致的动力损失补偿给后轮71。此时车辆前后轮总输出扭矩不会因前轮11抓地力不足而减小。
在车辆后轮71悬空时,后驱动电机50通过中间传动轴或花键、前驱动电机30、前桥传动轴20、前驱动桥10,把因后轮71悬空导致的后轮无法传递扭矩全部补偿给前轮11。此时车辆前轮输出:前驱动电机30的扭矩加上后驱动电机50的扭矩,车辆总输出扭矩不会因后轮71悬空而减小。
在车辆前轮11悬空时,前驱动电机30通过中间传动轴或花键、后驱动电机50、后桥传动轴60、后驱动桥70,把因前轮11悬空导致的后轮无法传递扭矩全部补偿给后轮71。此时车辆后轮输出:前驱动电机30的扭矩加上后驱动电机50的扭矩,车辆总输出扭矩不会因前轮11悬空而减小。
由图2可知,每个驱动电机在不同扭矩和转速下,能量转换效率大小不同,这是由电机的特性绝定的。本发明的驱动电机控制器算法,该算法通过Matlab-simulink进行编程,通过二维查表,根据当前整车控制器100请求的扭矩、当前电机转速,查出前驱动电机30需要输出的扭矩,后驱动电机50的输出扭矩为:总需求扭矩-前驱动电机扭矩,所以可以通过分配前后驱动电机扭矩,提高每个驱动电机的能量转换效率,达到提高整体驱动效率的目的。下面通过实例进一步说明:当电机转速在1500rpm时,整车控制器100请求300Nm扭矩。如果没有本发明驱动电机控制器相应算法,则前驱动电机30与后驱动电机50分别输出150Nm扭矩,前驱动电机30与后驱动电机50的效率均为89%,总效率仍为89%。通过本发明驱动电机控制器相应算法,前驱动电机输出300Nm扭矩,后驱动电机50关机不输出,则总的效率为95%。通过本发明驱动电机控制器相应算法且基于本发明驱动系统结构,可提升总体能量转换效率6%。
以上显示和描述了本发明的基本原理和主要特征以及本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 串联双电机动力系统
- 车辆用双电机动力系统和双电机混合动力系统