台阶式电动扶梯自动清洗机
文献发布时间:2023-06-19 10:55:46
技术领域
本发明涉及电梯自动清洗技术领域,特别是指一种能对台阶式电动扶梯的边角进行自动清洗的自动清洗机。
背景技术
随着现代化城市的高速发展,社会的飞跃进步,高楼大厦己成为商家及办公场所的首选。为了方便工作人员及顾客的上、下楼梯,电梯成为高楼大厦的标准配备。电梯则分为直升式及台阶式,直升式则是密闭的电梯轿厢在电梯井内进行直上直下的升降运动;而台阶式则是在开放的空间模拟行人进行上、下台阶的运动;很明显,开放的空间对于那些不急于赶路的人们以及逛商场的顾客则是最好的选项,因而许多高楼大厦中装设了台阶式电动扶梯。
台阶式电动扶梯由于设置在开放的空间,且表面积较大,表面经常需要进行清洁工作。其台阶1表面由平面11及竖向曲面12构成,如附图1所示,清洁工作是通清洗机上的圆筒形滚刷R上的刷条对台阶1清洁,从附图1可以看到,由平面11及竖向曲面12构成的夹角凹陷在圆筒形滚刷R上的刷条根本够不到的死角,也就是说在每次清洁过程中,每个台阶1的夹角是无法进行清洁的,进而造成清洁工作不全面。
发明内容
本发明的目的在于克服上述现有技术中的不足之处,而提供一种台阶式电动扶梯自动清洗机。
本发明是通过如下技术方案实现:台阶式电动扶梯自动清洗机,通过机架上设置的动力源将动力分别提供给平面清洗系统及立面清洗系统,平面清洗系统及立面清洗系统的一侧工作面平行于欲清洗的平面台阶面及立面台阶面,且平面清洗系统及立面清洗系统远离动力源一端的旋转端为平面清洗系统及立面清洗系统最窄小处。
所述的动力源固设在机架上,其输出端的链轮通过链条分别提供动力给平面清洗系统及立面清洗系统。
所述的平面清洗系统由平面过渡轮、平面工作轮、平面传动链及平面传动轮组成,一对平面传动轮构成筒状结构,并可旋转的设置在机架上;一对平面工作轮构成筒状结构,并可旋转的设置在机架上,一对平面传动轮与一对平面工作轮通过一对平面传动链连接为一旋转的整体,平面过渡轮与平面传动轮固定连接,且平面过渡轮通过传动链与动力源的链轮连接;平面工作轮的直径小于平面传动轮的直径;所述的一对平面传动链上对称固设有平面卡套,带有平面刷条的刷杆嵌卡在平面卡套内。
所述的立面清洗系统由立面过渡轮、立面工作轮、立面传动链及立面传动轮组成,一对立面传动轮构成筒状结构,并可旋转的设置在机架上;一对立面工作轮构成筒状结构,并可旋转的设置在机架上,一对立面传动轮与一对立面工作轮通过一对立面传动链连接为一旋转的整体,立面过渡轮与立面传动轮固定连接,且立面过渡轮通过传动链与动力源的链轮连接;立面工作轮的直径小于立面传动轮的直径;所述的一对立面传动链上对称固设有立面卡套,带有立面刷条的刷杆嵌卡在立面卡套内。
所述的一对平面传动链及固设其上平面卡套中的刷杆在移动过程中形成的平面平行于欲清洗的平面台阶面。
所述的一对立面传动链及固设其上立面卡套中的刷杆在移动过程中形成的平面平行于欲清洗的立面台阶面。
所述的平面过渡轮通过棘轮与平面传动轮固定连接。
所述的立面过渡轮通过棘轮与立面传动轮固定连接。
所述的嵌卡在平面卡套内带有平面刷条的刷杆可从平面卡套中取出。
所述的嵌卡在立面卡套内带有立面刷条的刷杆可从立面卡套中取出。
本发明由于通过两个清洁系统同时对互相垂直的两个平面进行清理,解决了现有技术中一个清洁头通过旋转对互相垂直的两个平面进行清理时存在无法清洁到死角的问题,且由于在两个清洁系统的前端尺寸较小,能够凸伸展至台阶式电动扶梯的窄小处进行清理,保证了清洁工作的质量。
附图说明:
附图1为现有技术结构示意图;
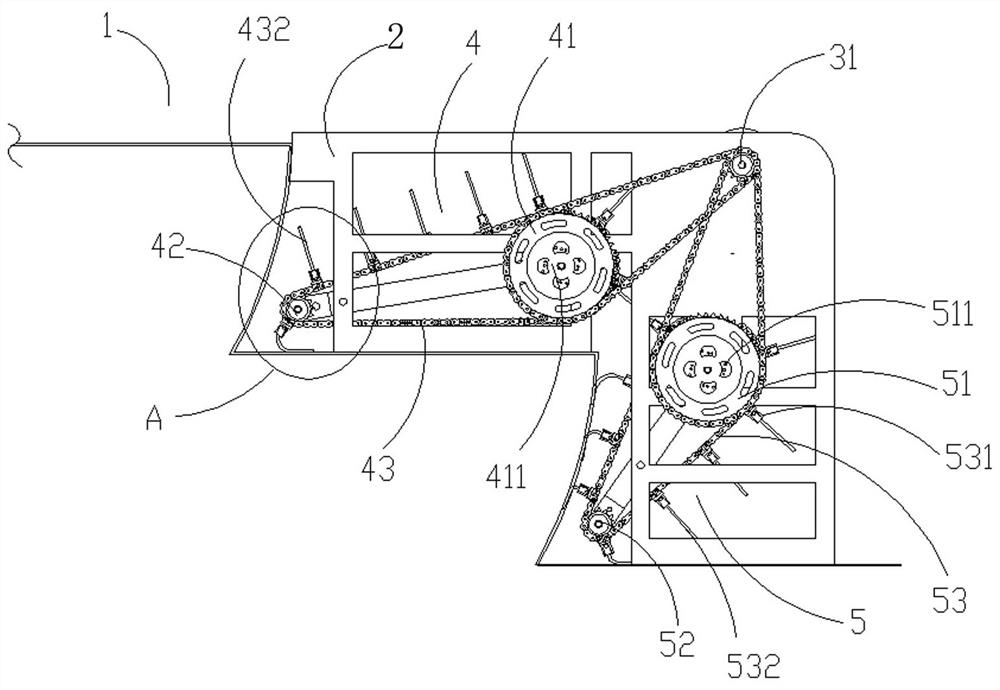
附图2为本发明主视图;
附图3为本发明立体图;
附图4为本发明另一视觉立体图;
附图5为附图2之A处放大图;
附图6为附图3之B处放大图。
具体实施方式:
见附图2~6,台阶式电动扶梯自动清洗机,台阶式电动扶梯自动清洗机,通过机架2上设置的动力源3将动力分别提供给平面清洗系统4及立面清洗系统5,平面清洗系统4及立面清洗系统5的一侧工作面平行于欲清洗的平面台阶面11及立面台阶面12,且平面清洗系统4及立面清洗系统5远离动力源3一端的旋转端为平面清洗系统4及立面清洗系统5最窄小处。
所述的动力源3固设在机架2上,其输出端的链轮31通过链条分别提供动力给平面清洗系统4及立面清洗系统5。
所述的平面清洗系统4由平面过渡轮41、平面工作轮42、平面传动链43及平面传动轮44组成,一对平面传动轮44构成筒状结构,并可旋转的设置在机架2上;一对平面工作轮42构成筒状结构,并可旋转的设置在机架2上,一对平面传动轮44与一对平面工作轮42通过一对平面传动链43连接为一旋转的整体,平面过渡轮41与平面传动轮44固定连接,且平面过渡轮41通过传动链与动力源3的链轮31连接;平面工作轮42的直径小于平面传动轮44的直径;所述的一对平面传动链43上对称固设有平面卡套431,带有平面刷条432的刷杆嵌卡在平面卡套431内。
所述的立面清洗系统5由立面过渡轮51、立面工作轮52、立面传动链53及立面传动轮54组成,一对立面传动轮54构成筒状结构,并可旋转的设置在机架2上;一对立面工作轮52构成筒状结构,并可旋转的设置在机架2上,一对立面传动轮54与一对立面工作轮52通过一对立面传动链53连接为一旋转的整体,立面过渡轮51与立面传动轮54固定连接,且立面过渡轮51通过传动链与动力源3的链轮31连接;立面工作轮52的直径小于立面传动轮54的直径;所述的一对立面传动链53上对称固设有立面卡套531,带有立面刷条532的刷杆嵌卡在立面卡套531内。
所述的一对平面传动链43及固设其上平面卡套431中的刷杆在移动过程中形成的平面平行于欲清洗的平面台阶面11。
所述的一对立面传动链53及固设其上立面卡套531中的刷杆在移动过程中形成的平面平行于欲清洗的立面台阶面12。
所述的平面过渡轮41通过棘轮411与平面传动轮44固定连接。
所述的立面过渡轮51通过棘轮511与立面传动轮54固定连接。
所述的嵌卡在平面卡套431内带有平面刷条432的刷杆可从平面卡套431中取出。
所述的嵌卡在立面卡套531内带有立面刷条532的刷杆可从立面卡套531中取出。
应用本发明时,接通外电,动力源3通过链轮31将动力分别提供给平面清洗系统4的平面过渡轮41及立面清洗系统5的立面过渡轮51,平面过渡轮41及立立面过渡轮51分别通过棘轮411及棘轮511带动平面传动轮44及立面传动轮54转动;
一对平面传动轮44通过一对平面传动链43使得一对平面工作轮42转动,由于一对平面传动链43及固设其上卡套431中的刷杆在移动过程中形成的平面平行于欲清洗的平面台阶面11,且平面工作轮42的直径小于平面传动轮44的直径,平面传动链43上的平面刷条432能够凸伸展至台阶式电动扶梯的窄小处的平面进行清理,随着机架2上的移动机构及爬升机构(该技术为现有技术,图中未示出)的动作而完成台阶式电动扶梯的平面台阶面11;
一对立面传动轮54通过一对立面传动链53使得一对立面工作轮52转动,由于一对立面传动链53及固设其上卡套531中的刷杆在移动过程中形成的平面平行于欲清洗的立面台阶面12,且立面工作轮52的直径小于立面传动轮54的直径,立面传动链53上的立面刷条532能够凸伸展至台阶式电动扶梯的窄小处的平面进行清理,随着机架2上的移动机构及爬升机构(该技术为现有技术,图中未示出)的动作而完成台阶式电动扶梯的平面台阶面12。
当平面传动链43上的平面刷条432或立面传动链53上的立面刷条532出现破损时,操作者可用手反向拉动平面传动链43或立面传动链53,由于平面过渡轮41通过棘轮411与平面传动轮44固定连接、立面过渡轮51通过棘轮511与立面传动轮54固定连接,平面传动轮44及立面传动轮54的转动不受平面过渡轮41及立面过渡轮51的约束,能够很轻松地拉动平面传动链43或立面传动链53至机架2设定位置,方便从平面传动链43或立面传动链53上的平面卡套431及立面卡套531中取出带有破损平面刷条432或立面刷条532的刷杆,并进行更换动作。
- 台阶式电动扶梯自动清洗机
- 电动扶梯自动清洗机刷条快速拆卸机构