一种电动清扫叉车系统
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及叉车领域,具体是一种电动清扫叉车系统。
背景技术
当前,对于一些马路、厂区道路、建筑工地、大型仓库等地域的地面清扫,一般采取汽车型的专业扫地车。而此类车常常车身庞大,不够灵活,以烧燃油提供动力,造成环境污染,且能耗也大,价格也比较昂贵,而且不够智能化。
同时,在叉车领域,存在的也主要是一些对货物进行堆垛、搬运的叉车,功能也相对单一,没有充分发挥出叉车的优势,如小巧灵活、驾驶简单、场地适应性强、节能环保等。
申请人提出一种将叉车与清扫功能相结合的电动清扫叉车系统。
发明内容
本发明的目的在于提供一种电动清扫叉车系统,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种电动清扫叉车系统,包括蓄电池、车辆控制器,所述蓄电池与多个逆变器的输入端分别连接,其中,存在至少一个逆变器连接用于使电动清扫叉车运行的行走单元;存在一个逆变器依次连接第二液压电机、双联齿轮泵,双联齿轮泵的一路输出连接液压制动单元,另一路连接转向单元;还存在一个逆变器的输出端依次连接第一液压电机、泵以及控制阀,所述控制阀通过油路分别与控制叉车执行动作的液压缸以及清扫装置连接;所述车辆控制器与控制所述清扫装置执行作业的清扫控制器通信连接,所述清扫控制器连接有检测外界环境状态以及油路状态的传感器。
作为本发明的改进方案,所述控制阀为四路液压阀,所述液压缸包括起升液压缸、倾斜液压缸与卸料液压缸,控制阀与起升液压缸、倾斜液压缸、卸料液压缸分别通过一路油路连接。
作为本发明的改进方案,所述清扫装置包括清扫滚刷马达、压缩机马达、吸风机马达,其中清扫滚刷马达、压缩机马达、吸风机马达共同通过控制阀的一路油路串联连接,清扫滚刷马达的输出轴连接清扫滚刷器,压缩机马达的输出轴连接压缩机,吸风机马达连接吸风机。
作为本发明的改进方案,所述清扫装置还包括油散热器,所述吸风机马达与油散热器油路串联。
作为本发明的改进方案,所述蓄电池还连接DC-DC转换器的输入端,DC-DC转换器的输出端分别连接洒水器、散热风扇以及控制清扫装置执行操作的清扫控制器的电源输入端,所述散热风扇固定在油散热器上并朝向油散热器吹风。
作为本发明的改进方案,所述DC-DC转换器的输出端还连接遥控器,所述遥控器与洒水器、散热风扇的控制开关远程连接,所述遥控器还与清扫控制器连接。
作为本发明的改进方案,所述行走单元包括第一牵引电机、第二牵引电机、第一驱动轮、第二驱动轮,第一牵引电机、第二牵引电机各与一个逆变器连接,且第一牵引电机与第二牵引电机分别驱使第一驱动轮、第二驱动轮的运转。
作为本发明的改进方案,所述转向单元包括转向器与转向液压缸,转向器与转向液压缸通过油路连接。
有益效果:本发明基于电动叉车结构,能够实现车辆行走、车辆转弯、门架升降、门架倾斜、清扫地面及卸料等功能,还可以通过传感器检测外界环境状态以及油路状态,进而通过清扫控制器判断清扫装置的启停。本发明不仅具有叉车体积小、作业灵活、操作简便的优点,而且节能环保、噪声低、无污染,购置成本低,清扫控制器可以与驾驶员、车辆控制器之间实现信号通讯,便于对清扫装置的工作状态实时监控、预警及主动安全控制,具有较高的智能化,适合推广使用。
附图说明
图1为本发明的系统原理图;
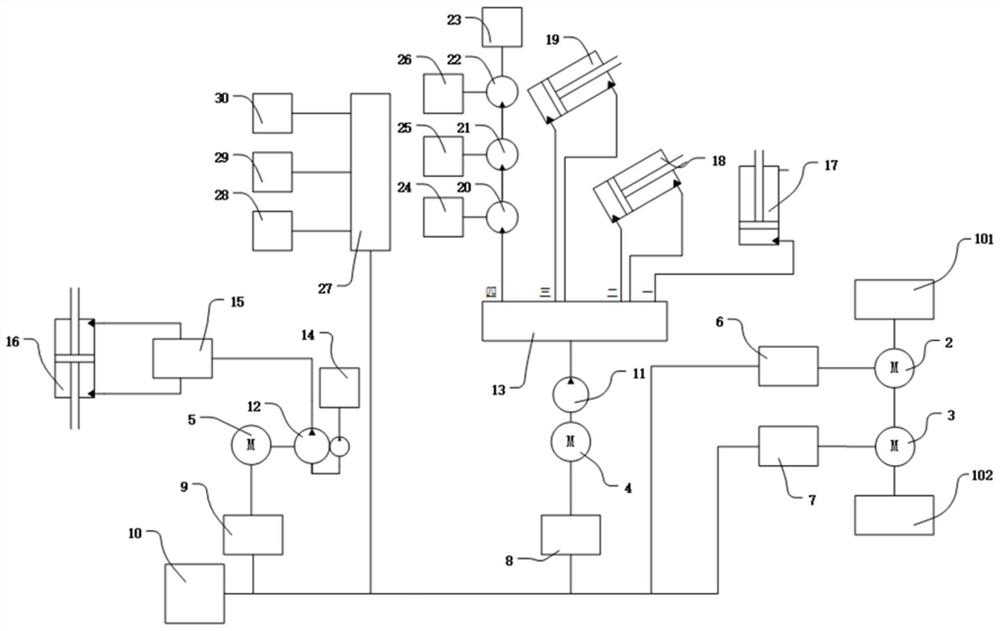
图2为本发明的工作原理图。
图中:101-第一驱动轮;102-第二驱动轮;2-第一牵引电机;3-第二牵引电机;4-第一液压电机;5-第二液压电机;6-第一逆变器;7-第二逆变器;8-第三逆变器;9-第四逆变器;10-蓄电池;11-泵;12-双联齿轮泵;13-控制阀;14-液压制动单元;15-转向器;16-转向液压缸;17-起升液压缸;18-倾斜液压缸;19-卸料液压缸;20-清扫滚刷马达;21-压缩机马达;22-吸风机马达;23-油散热器;24-清扫滚刷器;25-压缩机;26-吸风机;27-DC-DC转换器;28-清扫控制器;29-洒水器;30-散热风扇;31-车辆控制器;32-传感器;33-遥控器。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参见图1,一种电动清扫叉车系统,包括蓄电池10,蓄电池10的正极、负极分别与第一逆变器6、第二逆变器7、第三逆变器8及第四逆变器9输入端的正极、负极对应连接。
其中,第一逆变器6的输出端与第一牵引电机2连接,第二逆变器7的输出端与第二牵引电机3连接,第一牵引电机2、第二牵引电机3均为三相交流异步电机,功率和特性一致。第一牵引电机2上的三相U、V、W分别与第一逆变器6输出端的U、V、W极连接;第二牵引电机3上的三相U、V、W分别与第二逆变器7输出端的U、V、W极连接。第一驱动轮101、第二驱动轮102安装在车辆驱动桥两端的轮毂上,第一牵引电机2和第二牵引电机3分别驱动两边减速箱,减速箱进而带动第一驱动轮101与第二驱动轮102运转。第一驱动轮101与第二驱动轮102起到支撑车辆的作用,同时接受驱动桥输出的动力,将驱动力转化到地面,使得车辆行驶。第一牵引电机2、第二牵引电机3、第一驱动轮101、第二驱动轮102构成电动清扫叉车的行走单元。
第一逆变器6和第二逆变器7分别控制第一牵引电机2和第二牵引电机3,使电机工作或停止。同样,能将车辆行驶的再生能量通过第一牵引电机2和第二牵引电机3分别反馈到第一逆变器6和第二逆变器7。再生能量分别经第一逆变器6和第二逆变器7逆变后,通过直流电形式反馈到蓄电池10的母线上,如果母线上正存在用电单元取电,那么反馈到母线上的再生能量优先被用电单元使用,多余部分的再生能量再返回到蓄电池10进行充电。
蓄电池10为车辆系统的能量存储模块,首先为功率消耗单元如清扫装置等提供电能,再将第一逆变器6和第二逆变器7的没被直接利用掉的再生电能进行存储。
第三逆变器8连接第一液压电机4,第一液压电机4为三相交流异步感应电动机,不具有能量再生反馈功能,其三相U极、V极、W极分别与第三逆变器8输出端的U极、V极、W极连接。泵11的花键轴与第一液压电机4的花键连接,泵11的输出口通过油路连接到控制阀13。泵11将第一液压电机4输出的机械能转换为液压能,再输出到控制阀13,进行液压能量分配。
控制阀13为四路液压阀,通过油路分别与控制叉车执行动作的液压缸以及清扫装置连接,控制阀13将泵11输送来的液压能进行分配,第一液压电机4的功率一般较大,提供液压起升、倾斜、清扫器卸料、清扫等功率需求。具体来说,液压缸包括起升液压缸17、倾斜液压缸18与卸料液压缸19。
如图2所示,控制阀13的第一片油路连接叉车的起升液压缸17,第二片油路连接叉车的倾斜液压缸18,起升液压缸17用于叉车门架的起升,倾斜液压缸18用于实现门架的前后倾动作,工作方式和原理与常规的电动叉车相同。第三片油路连接清扫装置的卸料液压缸19。在叉车端,当驾驶员向前或向后操作第三片油路对应的操纵杆或开关时,第三片阀出油进入清扫装置的卸料液压缸19,使得油缸活塞杆移动,实现清扫装置料斗的卸料和回位动作。控制阀13的第四片油路连接到清扫装置,清扫装置包括清扫滚刷马达20、压缩机马达21、吸风机马达22、油散热器23,第四片阀出油依次进入清扫滚刷马达20、压缩机马达21、吸风机马达22、油散热器23,最后油回至第四片阀回油口,其中多余油量直接回至叉车油箱,以上三个马达串联同时工作,实现了清扫装置的清扫功能。油散热器23起到对马达工作出来的高温油散热作用,保证油路系统正常工作。
清扫滚刷马达20的输出轴连接清扫滚刷器24,清扫滚刷器24可不停地旋转将地面废杂物扫到收集料斗中;压缩机马达21的输出轴连接压缩机25,压缩机25可将空气压缩,使得清扫装置内部的滤芯形成负压状态,吸附空气浮尘;吸风机马达22连接吸风机26,吸风机26产生的风力可将地面一些轻浮物吸到收集料斗中。
第四逆变器9连接第二液压电机5,第二液压电机5为三相交流异步感应电动机,不具有能量再生反馈功能,其电机上的三相U极、V极、W极分别与第四逆变器9输出端的U极、V极、W极连接。第二液压电机5采取较小功率的电机,提供转向和制动功率需求。
双联齿轮泵12将第二液压电机5输出的机械能转换为液压能,双联齿轮泵12的主泵能量输出到转向单元,转向单元包括转向器15与转向液压缸16,转向器15与转向液压缸16通过油路连接,再将液压能输送到转向液压缸16,实现车辆转向功能;双联齿轮泵12的副泵能量输出到液压制动单元14,供车辆进行液压制动。液压制动单元14为现有叉车的常见液压制动单元,为叉车提供行驶制动施加力。
如图2所示,蓄电池10还连接DC-DC转换器27的输入端,车辆端蓄电池10的电压较高,DC-DC转换器27可以将蓄电池10的电压转换成清扫控制器28、传感器32、洒水器29、散热风扇30、遥控器33等所需的电压。具体地,DC-DC转换器27的输出端分别连接洒水器29、散热风扇30以及控制清扫装置执行操作的清扫控制器28的电源输入端。洒水器29可在清扫干燥的地面时向行进前方地面喷洒水雾,增加湿度,降低扬尘。散热风扇30固定在油散热器23上,油散热器23与吸风机马达22串联连接,散热风扇30朝向油散热器23吹风,用于加快油散热器23的降温。
DC-DC转换器27的输出端还连接遥控器33,遥控器33与洒水器29、散热风扇30的控制开关远程连接,遥控器33还与清扫控制器28连接。清扫控制器28连接有检测外界环境状态以及油路状态的传感器32。清扫控制器28可以通过遥控器33接收驾驶员的控制信号,根据实际情况控制洒水器29、散热风扇30的启停,达到节水节电。
车辆控制器31与清扫控制器28通信连接,传感器32检测外界环境状态如灰尘强度、气温等以及油路状态如油温、油压等,检测的信息可以显示到车辆仪表上,或者警示示意。譬如,当清扫控制器28接收到油压传感器反馈的压力异常时,将信息反馈给车辆控制器31,车辆控制器31可对油泵电机(第一液压电机4、第二液压电机5等)和行走单元中的第一牵引电机2、第二牵引电机3进行强制停止,使得清扫装置停止工作,反馈信息到车辆仪表,提示驾驶员检查故障。
本发明基于叉车结构,能够实现车辆行走、车辆转弯、门架升降、门架倾斜、清扫地面及卸料等功能,不仅具有叉车体积小、作业灵活、操作简便的优点,而且节能环保、噪声低、无污染,购置成本低,清扫控制器可以与驾驶员、车辆控制器之间实现信号通讯,便于对清扫装置的工作状态实时监控、预警及主动安全控制,具有较高的智能化,适合推广使用。
虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
故以上所述仅为本申请的较佳实施例,并非用来限定本申请的实施范围;即凡依本申请的权利要求范围所做的各种等同变换,均为本申请权利要求的保护范围。
- 一种电动清扫叉车系统
- 一种电动叉车的燃料电池增程系统及电动叉车