一种基于集员估计的自动控制系统故障检测方法
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及基于模型的控制系统故障检测技术领域,特别涉及一种基于集员估计的自动控制系统故障检测方法。
背景技术
随着信息技术的不断发展以及工业化水平不断提高,控制系统的自动化范围不断扩大,对系统安全性的要求也在不断提升。故障检测是控制理论与应用中最基本的部分之一,在通信网络、工程系统、化工等领域都有着广泛的应用。
基于模型的故障检测技术是以数学模型为基础,对控制系统中存在的不被允许的偏差进行检测。而噪声的存在往往会影响到模型的精确性进而影响系统的稳定性以及检测的精确性,目前对噪声的处理方法主要集中在Kalman滤波以及H
发明内容
本发明的目的在于提供一种基于集员估计的自动控制系统故障检测方法,以解决现有基于模型的故障检测技术所依赖的噪声模型往往难以精确获取或者过于保守以及针对传统的点状态估计方法对传感器精度要求较高的问题。
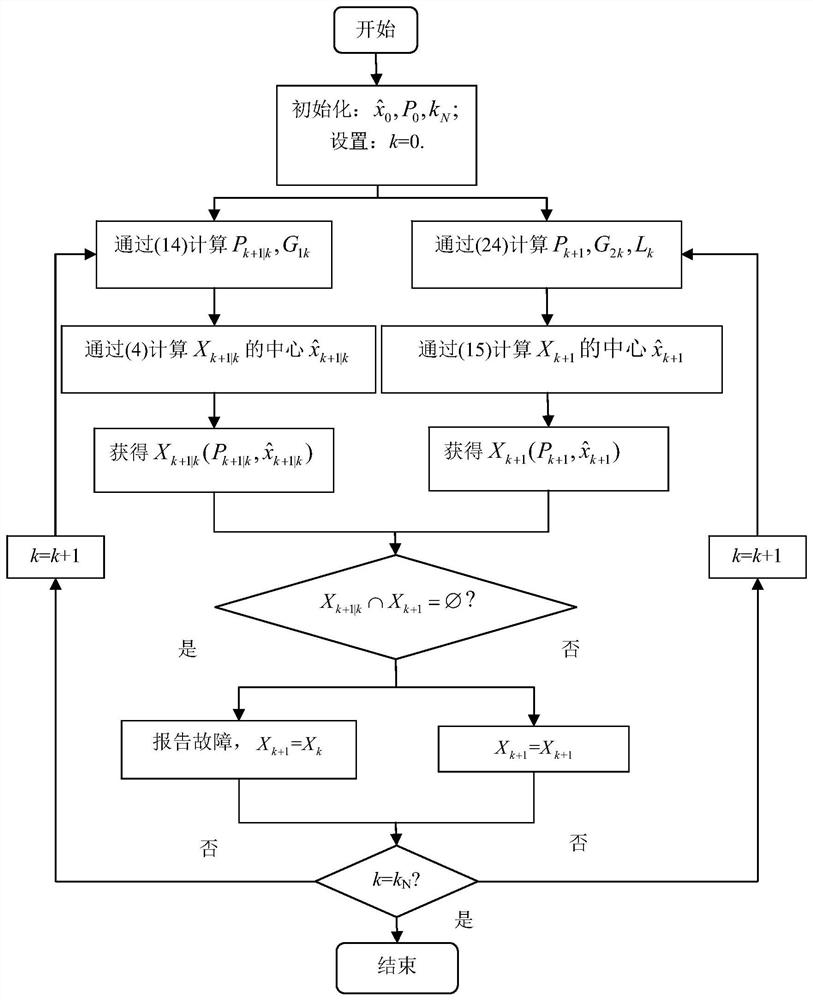
为了解决上述技术问题,本发明的技术方案是:提供一种基于集员估计的自动控制系统故障检测方法,包括:步骤一、基于物理规律建立符合实际系统特性的被控系统数学模型;步骤二、设计集员预测器,获得系统实际状态的一步提前状态估计预测域,利用凸优化方法获得最优椭球域;步骤三、设计集员滤波器,获得系统实际状态的状态估计域,以及系统状态的估计误差,利用凸优化方法获得最优椭球域;步骤四、检验一步提前状态估计域与实际状态估计域的交集来确定控制系统是否存在故障,当系统不存在故障时,则状态估计椭球域为系统状态的状态估计域;当系统存在故障时,采用最近时刻的状态估计域作为系统状态的状态估计域进行后续操作。
进一步地,在步骤一中所述被控系统数学模型为:
式(1)中x
其中,
假设初始状态x
其中
进一步地,在步骤二中假设任意时刻k,真实状态x
其中G
由于在k时刻,P
其中E
根据系统模型(1),集员预测器(4)以及(5),一步提前预测误差
定义
其中
通过噪声模型(2)以及z,获得用于确定椭球域的以下约束条件:
改写成η
使得(10)成立的充分条件为,存在非负参数τ
使得(11)对任意η
式(12)等价为:
利用凸优化方法获得最优椭球域:
subject to (13) (14)
进一步地,在步骤三中,假设任意时刻k,真实状态x
其中G
根据(1),(5)和(15),可得系统状态的估计误差为:
定义
其中
通过噪声模型(2)以及z,获得用于确定椭球域的以下约束条件:
改写成η
使得(20)成立的充分条件为,存在非负参数τ
使得(21)对任意η
式(22)等价为:
利用凸优化方法获得最优椭球域:
subject to (23) (24)
本发明提供的基于集员估计的自动控制系统故障检测方法,针对具有噪声的系统进行数学建模,建模过程中无需知道噪声的具体特性,且所构建的未知有界噪声模型相比较于完全未知的噪声模型,保守性低,更符合实际系统特性。本发明提供的基于集员估计的自动控制系统故障检测方法所设计的集员预测器与集员滤波器都是采用区间估计的方法,获得的是系统实际状态的状态估计域而非状态估计点,在保障状态估计可靠性的同时,降低了对传感器的精度要求。本发明提供的基于集员估计的自动控制系统故障检测方法能够在一个采样周期内对系统出现的故障做出实时反馈,具有灵敏度高,可靠性高的优势。
附图说明
下面结合附图对发明作进一步说明:
图1为本发明实施例提供的基于集员估计的自动控制系统故障检测方法步骤流程示意图;
图2为本发明实施例提供的基于集员估计的自动控制系统故障检测方法中集员一步提前状态预测算法步骤流程示意图;
图3为本发明实施例提供的基于集员估计的自动控制系统故障检测方法中集员状态估计算法步骤流程示意图;
图4为本发明实施例提供的状态x
图5为本发明实施例提供的状态x
具体实施方式
以下结合附图和具体实施例对本发明提出的基于集员估计的自动控制系统故障检测方法作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比率,仅用以方便、明晰地辅助说明本发明实施例的目的。
本发明的核心思想在于,本发明提供的基于集员估计的自动控制系统故障检测方法,针对具有噪声的系统进行数学建模,建模过程中无需知道噪声的具体特性,且所构建的未知有界噪声模型相比较于完全未知的噪声模型,保守性低,更符合实际系统特性。本发明提供的基于集员估计的自动控制系统故障检测方法所设计的集员预测器与集员滤波器都是采用区间估计的方法,获得的是系统实际状态的状态估计域而非状态估计点,在保障状态估计可靠性的同时,降低了对传感器的精度要求。本发明提供的基于集员估计的自动控制系统故障检测方法能够在一个采样周期内对系统出现的故障做出实时反馈,具有灵敏度高,可靠性高的优势。
提供一种基于集员估计的自动控制系统故障检测方法,包括:步骤一、基于物理规律建立符合实际系统特性的被控系统数学模型;步骤二、设计集员预测器,获得系统实际状态的一步提前状态估计预测域,利用凸优化方法获得最优椭球域;步骤三、设计集员滤波器,获得系统实际状态的状态估计域,以及系统状态的估计误差,利用凸优化方法获得最优椭球域;步骤四、检验一步提前状态估计域与实际状态估计域的交集来确定控制系统是否存在故障,当系统不存在故障时,则状态估计椭球域为系统状态的状态估计域;当系统存在故障时,采用最近时刻的状态估计域作为系统状态的状态估计域进行后续操作。
图1为本发明实施例提供的基于集员估计的自动控制系统故障检测方法步骤流程示意图;图2为本发明实施例提供的基于集员估计的自动控制系统故障检测方法中集员一步提前状态预测算法步骤流程示意图;图3为本发明实施例提供的基于集员估计的自动控制系统故障检测方法中集员状态估计算法步骤流程示意图。参照图1、图2以及图3,基于集员估计的自动控制系统故障检测方法,包括:步骤一、基于物理规律建立符合实际系统特性的被控系统数学模型,表示:
式(1)中x
其中,
假设初始状态x
其中
步骤二、假设任意时刻k,真实状态x
其中G
由于在k时刻,P
其中E
根据系统模型(1),集员预测器(4)以及(5),一步提前预测误差
定义
其中
通过噪声模型(2)以及z,获得用于确定椭球域的以下约束条件:
改写成η
使得(10)成立的充分条件为,存在非负参数τ
使得(11)对任意η
式(12)等价为:
利用凸优化方法获得最优椭球域:
subject to (13) (14)
步骤三、假设任意时刻k,真实状态xk都位于它的状态估计椭球域
其中G
根据(1),(5)和(15),可得系统状态的估计误差为:
定义
其中
通过噪声模型(2)以及z,获得用于确定椭球域的以下约束条件:
改写成η
使得(20)成立的充分条件为,存在非负参数τ
使得(21)对任意η
式(22)等价为:
利用凸优化方法获得最优椭球域:
subject to (23) (24)
步骤四、检验一步提前状态估计域与实际状态估计域的交集来确定控制系统是否存在故障,当系统不存在故障时,则状态估计椭球域X
在本发明实施例中,以轻型飞机的横向运动为例,为便于说明,本说明书中仅考虑飞机的侧滑速度和系统的角速度,将横向运动的线性连续时间模型转化为如下离散时间模型:
其中采样周期为T=0.1s,系统状态x
其中故障信号为:
图4为本发明实施例提供的状态x
显然,本领域的技术人员可以对本发明进行各种改动和变形而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
- 一种基于集员估计的自动控制系统故障检测方法
- 一种基于强跟踪集员估计的电力系统状态估计方法