检测装置及检测方法
文献发布时间:2023-06-19 11:44:10
技术领域
本申请涉及光学技术领域,尤其涉及一种检测装置及检测方法。
背景技术
晶圆是指硅半导体集成电路制作所用的硅晶片。晶圆作为芯片的基底,如果晶圆上存在缺陷,将导致其制备而成的芯片失效,从而导致芯片的良率降低,制造成本增高,在芯片制备前以及芯片制备过程中均需对晶圆进行缺陷检测,因此晶圆缺陷检测装置是很有必要的。
发明内容
本申请实施例提供一种检测装置及检测方法,用于提升检测的准确性。
第一方面,本申请提供一种检测装置,包括第一光学系统和第二光学系统,所述第一光学系统用于对待测物进行第一检测,得到所述待测物表明的待检出对象分布信息;所述第二光学系统用于根据所述待检出对象分布信息对所述待测物进行第二检测,得到待检出对象细节信息,所述第二光学系统的检测精度高于所述第一光学系统的检测精度。
第二方面,本申请提供一种检测方法,应用于如第一方面所述的检测装置,所述方法包括:
通过第一光学系统对待测物进行第一检测,得到所述待测物表面的待检出对象分布信息;
通过第二光学系统根据所述待检出对象分布信息对所述待测物进行第二检测,得到待检出对象细节信息。
本申请实施例提供的检测装置,包括第一光学系统和第二光学系统,第一光学系统用于对待测物进行第一检测,得到待测物表面的待检出对象分布信息,第二光学系统用于根据待检出对象分布信息对待测物进行第二检测,得到待检出对象细节信息,第二光学系统的检测精度高于第一光学系统的检测精度,通过两个光学系统实现全面检测待测物,进而提升检测的准确性。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本申请一个实施例的检测装置的结构示意图;
图2为本申请另一个实施例的检测装置的结构示意图;
图3为本申请一个实施例的在图2最左边的第二暗场光源照射下探测器得到的图像信息的示意图;
图4为本申请一个实施例的在明场光源照射下探测器得到的图像信息的示意图;
图5为本申请一个实施例的在第一暗场光源照射下探测器得到的图像信息的示意图;
图6为本申请另一个实施例的检测装置的结构示意图;
图7为本申请另一个实施例的检测装置的结构示意图;
图8为本申请一个实施例的载物台的结构示意图;
图9为本申请另一个实施例的检测装置的结构示意图;
图10为本申请另一个实施例的检测装置的结构示意图;
图11为本申请一个实施例的检测方法的流程示意图。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明,应对理解,此处所描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
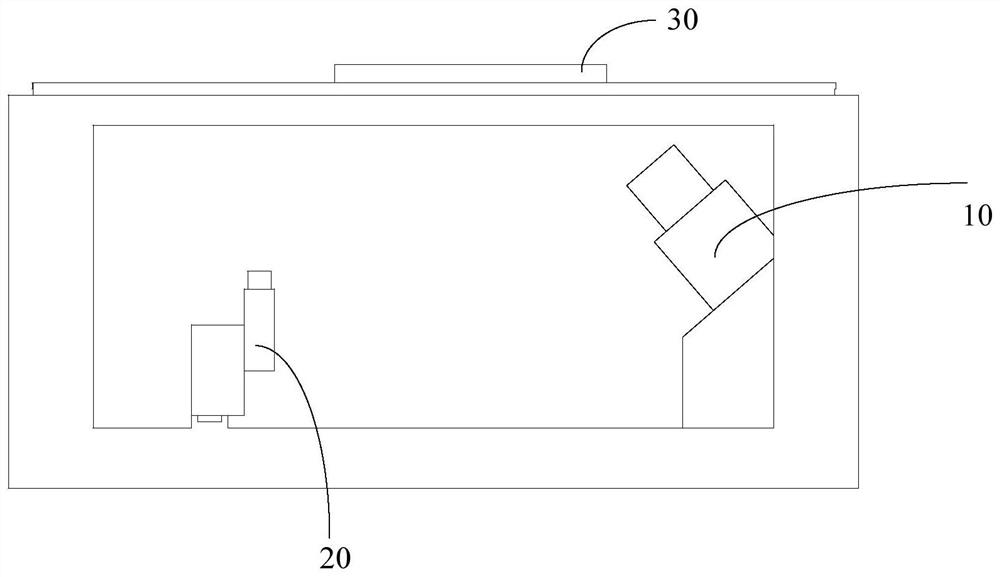
图1为本申请一个实施例的检测装置的结构示意图。如图1所示,该检测装置包括第一光学系统10和第二光学系统20,所述第一光学系统10用于对待测物进行第一检测,得到所述待测物表面的待检出对象分布信息;所述第二光学系统20用于根据所述待检出对象分布信息对所述待测物进行第二检测,得到待检出对象细节信息,所述第二光学系统20的检测精度高于所述第一光学系统10的检测精度。
其中,所述待测物包括晶圆、芯片或玻璃板等;所述待检出对象为待测物表面的缺陷、孔、凸起或凹坑等。
一个实现中,如图2所示,图2为本申请另一个实施例的检测装置的结构示意图,如图2所示,所述第一光学系统10包括第一探测组件11和多个第一光源,所述多个第一光源包括明场光源121和暗场光源122,所述明场光源121用于向所述待测物发射第一检测光束,所述第一检测光束经所述待测物反射形成第一信号光,所述第一探测组件11用于收集所述第一信号光;所述暗场光源122用于向所述待测物发射第四检测光束,所述第四检测光束经所述待测物散射形成第四信号光,所述第一探测组件11用于收集所述第四信号光。
其中,所述第一光学系统10包括的第一光源发射的检测光束在所述待测物表面形成检测光斑,所述检测光斑的形状可以是条形的或是其他形状。所述检测光斑沿第一方向延伸。
其中,多个第一光源的发光时段互不相同。
可选地,所述暗场光源122的数量为多个,所述暗场光源的出光方向、所述待测物待测表面法线、所述第一探测组件11的光线采集方向不共面;或者,所述暗场光源的出光方向、所述待测物待测表面法线、所述第一探测组件11的光线采集方向共面,且所述暗场光源发射光束的入射角与所述第一探测组件11采集的光线出射角不相同;
多个所述暗场光源122中存在至少两个暗场光源122的亮度和/或波长不同。
其中,图2示出了暗场光源的出光方向、待测物待测表面法线、第一探测组件11的光线采集方向共面,且暗场光源发射光束的入射角与第一探测组件11采集的光线出射角不相同。
可选地,多个所述暗场光源包括第一暗场光源和多个第二暗场光源,所述第一暗场光源发射光束的光轴、所述第二暗场光源发射光束的光轴和所述待测物待测表面法线共面设置,所述第一暗场光源发射光束的光轴平行于所述待测物待测表面法线,所述第二暗场光源发射光束的光轴与所述待测物待测表面法线具有锐角夹角。
其中,图2示出了第一暗场光源设置在待测物待测表面法线上。
一个实现中,所述多个第二暗场光源中存在至少两个第二暗场光源的亮度和/或波长不同。
一个实现中,所述多个第二暗场光源包括至少一个暗场光源组,每个所述暗场光源组包括两个所述第二暗场光源,每个所述暗场光源组包括的两个第二暗场光源的出光方向对称设置在所述法线的两侧。如图2所示,两个第二暗场光源的出光方向分别设置在法线的两侧,且两个第二暗场光源的出光方向与法线的夹角均为β。
一个实现中,每个所述暗场光源组包括的两个第二暗场光源的亮度和/或波长不同。该两个第二暗场光源使用不同亮度的光源,有利用在防止信号交叉的同时,防止探测器饱和,从而能够增加检测精度。
一个实现中,所述两个第二暗场光源中的其中一个第二暗场光源为LED光源,另一个第二暗场光源为光纤光源。
其中,所述另一个第二暗场光源的出光方向与所述第一探测组件11的光线采集方向形成的第一角度,所述其中一个第二暗场光源的出光方向与所述探测组件11的光线采集方向形成的第二角度,所述第一角度大于所述第二角度。请参见图3,图3为本申请一个实施例的在图1最左边的第二暗场光源照射下第一探测组件得到的图像信息的示意图。由于第一探测组件11几乎未收集到由待测物表面反射的光信号,使得图像信息的背景亮度很低,且在大角度(第一探测组件11与该第二暗场光源的夹角)下,第一探测组件11收集到的由待测物表面缺陷散射的光信号也相对较少,使得图像信息背景亮度低于缺陷亮度,且两者的亮度均较小。
一个实现中,所述明场光源121的出光方向、所述待测物待测表面法线、所述第一探测组件11的光线采集方向共面,且所述明场光源121发射光束的入射角与所述第一探测组件11采集的光线出射角相同,所述明场光源121为LED光源。如图1所示,第一探测组件11的光线采集方向和明场光源121的出光方向分别设置在法线的两侧,且明场光源121发射光束的入射角与第一探测组件11采集的光线出射角均为α。
其中,在明场光源121照射待测物时,第一探测组件11主要收集反射光,光信号较强不需要高亮度光源。请参见图4,图4为本申请一个实施例的在明场光源照射下第一探测组件得到的图像信息的示意图。在明场光源121照射下,由于第一探测组件11与明场光源121对称设置在法线的两侧,第一探测组件11主要收集了由待测物表面反射的光信号,而被待测物表面缺陷散射的光信号被第一探测组件11收集到的较少,使得图像信息中背景亮度高于缺陷的亮度。
一个实现中,所述第一暗场光源为光纤光源。
其中,在第一暗场光源照射待测物时,第一探测组件11收集的散射光较弱,光纤光源有利于增加光强度。请参见图5,图5为本申请一个实施例的在第一暗场光源照射下第一探测组件得到的图像信息的示意图。第一探测组件11主要收集了由待测物表面缺陷散射的光信号,而被待测物表面反射的光信号只有少部分被第一探测组件收集,使得图像信息中背景亮度略低于缺陷的亮度。
其中,光纤光源可以使用窄光谱光源,例如R、G、B光、紫外或红外光等,从而能够对不同缺陷进行检测。
其中,LED光源为白光条形LED灯,光纤光源为条形光纤(可连接RGB三色灯箱)。
其中,光源的出光方向为光源发射光束的光轴方向。第一探测组件11的光线采集方向为第一探测组件11收集的光束的光轴方向。
其中,入射角为入射光线与被测表面法线的夹角;出射角为出射光线与被测表面法线之间的夹角。
一个实现中,如图6所示,图6为本申请另一个实施例的检测装置的结构示意图,如图6所示,所述第二光学系统20包括:第二镜头23、第二光源21和第二探测组件22,所述第二光源21用于向所述待测物发射第二检测光束,所述第二检测光束在所述待测物表面形成检测光斑;所述第二探测组件22用于收集经过所述待测物形成的第二信号光。
其中,所述检测光斑的形状可以是条形的或是其他形状。所述检测光斑的尺寸大于或等于所述待测物的最大尺寸。
可选地,所述第二检测光束经所述第二镜头23后在所述待测物表面形成检测光斑;所述第二镜头23还用于收集所述第二信号光,并将所述第二信号光汇聚至所述第二探测组件22。
其中,第二镜头23为物镜。
可选地,所述第二光学系统还包括对焦模块24,所述对焦模块24包括:对焦光源和对焦探测器;所述对焦光源通过所述第二镜头向所述待测物发射对焦光束,所述对焦探测器通过所述第二镜头探测所述待测物返回的对焦光束。
可选地,所述对焦模块24包括WDI聚焦模块、共聚焦模块、干涉仪模块中的其中一个。
可选地,所述第二光学系统还包括第一镜头25、光整形器件26、第一分光镜27和第二分光镜28,所述第二光源21发射的所述第二检测光束依次经过所述光整形器件26、所述第一分光镜27、所述第二分光镜28和所述第一镜头23照射所述待测物,经过所述待测物形成的第二信号光经过所述第二镜头23进入所述第二分光镜28,经过所述待测物形成的第二信号光部分经过第二分光镜29反射后进入所述对焦模块24,部分透射经过所述第二分光镜28后,依次经过所述第一分光镜27和所述第一镜头25后进入所述第二探测组件22。
其中,第一镜头25为目镜。
其中,第二探测组件22分辨率大于第一探测组件的分辨率。
其中,第二光源21为明场光源,第二光源21可以是光纤光源、LED光源等。
其中,所述第二探测组件22、所述第一镜头25、所述第一分光镜27、所述第二分光镜28、所述第二镜头23沿着单一直线的第一光轴配置,所述第二光源21、所述光整形器件26和所述第一分光镜27沿着单一直线的第二光轴配置,所述对焦模块24和所述第二分光镜28沿着单一直线的第三光轴配置,所述第一光轴和所述第二光轴垂直,所述第二光轴与所述第三光轴平行。
其中,第一分光镜27与第二分光镜28平行设置,第一分光镜27和第二分光镜28与第一光轴的夹角均为45°。
其中,由于第一光轴与第二光轴垂直,以确保形貌有微小变化的状态图像畸变极小,同时确保整个像面的照明均匀性,能够提高检测精度。
其中,由于第三光轴与第一光轴垂直,能够使对焦模块24的对焦测量点位置与第二光学系统20的检测位置重合,能够提高第二光轴系统的聚焦精度,提高检测精度。同时,对焦速度更快,对焦模块24完全与成像光路重合,系统装调简单。
其中,对焦模块24用于监测待测物是否位于第二镜头23的焦平面上,若待测物未位于焦平面上,需调节待测物与第二镜头23之间的距离,可以通过调节待测物的位置,也可以通过调节第二镜头23的位置,使得第二光学系统20可提供清晰的图像信息,即清晰的缺陷细节信息。
一个实现中,如图7所示,图7为本申请另一个实施例的检测装置的结构示意图,如图7所示,所述第二检测光束经所述待测物反射形成所述第二信号光;所述第二光学系统20还包括:第三光源29,所述第三光源29用于向所述待测物发射第三检测光束,所述第三检测光束经所述待测物散射形成第三信号光;所述第二探测组件用于收集所述第三信号光。
其中,所述第三信号光经所述第二镜头23进入所述第二分光镜28,所述第三信号光部分经过所述第二分光镜28反射后进入所述对焦模块24,部分透射经过所述第二分光镜28后,依次经过所述第一分光镜27以及所述第一镜头25后进入所述第二探测组件22。
其中,所述第二光源21与所述第三光源29的亮度和/或波长不同。
其中,所述第三光源29为暗场光源,所述第三光源29可以是光纤光源、LED光源等。
其中,第三光源29的数量可以是1个或多个。
其中,第三光源29的数量为多个,多个所述第三光源29与第三光轴的夹角可以是相同的,也可以是不相同的,也可以是部分相同的,在此不作限定。多个所述第三光源29的亮度和/或波长可以是相同的,也可以是不相同的,也可以是部分相同的,在此不作限定。
可选地,所述检测装置还包括:载物台30,用于承载所述待测物;
所述载物台30被配置为带动所述待测物相对所述第一光学系统10进行运动操作,所述第二光学系统20被配置为相对于所述载物台30沿第二方向平移;或者,所述载物台30被配置为带动所述待测物相对所述第二光学系统20平移,所述第一光学系统10被配置为相对于所述载物台30沿所述第二方向平移;其中,所述运动操作包括沿所述第一方向平移、绕所述第一方向旋转中的一者或两者组合。
其中,所述载物台30包括通孔31,所述通孔31的侧壁向所述通孔31的中心一侧周向设置有凸台32,所述通孔31用于承载所述待测物,如图8所示。
可选地,所述第一方向垂于所述第二方向。
可选地,所述第一探测组件11具有位于所述待测物表面的第一视场区;所述第一视场区沿所述第一方向延伸。
可选地,所述第一探测组件的数量为多个,多个所述第一探测组件的第一视场区沿所述第一方向排列。
其中,所述第一探测组件包括探测器件和光信号收集器件,探测器件为线阵探测组件,如线阵电荷耦合器件(Charge Coupled Device,CCD)或者时间延时积分电荷耦合器件(Time Delay and Integra-tion Charge Coupled Devices,TDICCD),光信号收集器件为透镜组,主要用于收集待测物表面形成的光信号。
其中,所述第一视场区的形状为长条形或是其他形状。
一个实现中,如图9所示,图9为本申请另一个实施例的检测装置的结构示意图,如图9所示,所述检测装置还包括第一导轨40和第二导轨50,所述载物台30与所述第一导轨40滑动连接,所述第二光学系统20与所述第二导轨40滑动连接。
一个实现中,如图10所示,图10为本申请另一个实施例的检测装置的结构示意图,如图10所示,所述检测装置还包括第一导轨40和第二导轨50,所述载物台30与所述第一导轨40滑动连接,所述第一光学系统10与所述第二导轨40滑动连接。
其中,所述第一方向与所述第一导轨平行。所述第二方向与所述第二导轨平行。
一个实现中,所述待测物为晶圆,所述第一光学系统用于对所述晶圆背面进行所述第一检测,所述第二光学系统用于对所述晶圆背面进行所述第二检测。
可以看出,本申请实施例提供的检测装置通过两个光学系统实现全面检测待测物,进而提升检测的准确性。
图11为本申请一个实施例的检测方法的流程示意图,应用于上述检测装置,该方法包括:
步骤101:通过第一光学系统对待测物进行第一检测,得到所述待测物表面的待检出对象分布信息。
步骤102:通过第二光学系统根据所述待检出对象分布信息对所述待测物进行第二检测,得到待检出对象细节信息。
一个实现中,所述第一检测包括:控制载物台相对所述第一光学系统进行运动操作,所述运动操作包括沿所述第一方向平移、绕所述第一方向旋转中的一者或两者组合,并控制所述第一光学系统对所述待测物进行扫描;
所述第二检测包括:根据所述分布信息中待检出对象的位置,控制所述第二光学系统与所述载物台相对移动,对待检出对象进行复检,
所述相对移动包括控制所述第二光学系统沿第二方向平移、控制所述载物台带动所述待测物沿第一方向平移中的一者或两者组合。
其中,所述运动操作可以往复运动,所述相对移动可以往复运动,通过往复运动能够对待测物进行多次检测,从而增加检测精度。
可以看出,本申请实施例提供的检测装置通过两个光学系统实现全面检测待测物,进而提升检测的准确性。
以上所述仅为本申请的较佳实施例而已,并不用以限制本申请。本领域技术人员可以理解的是,本申请的检测装置不仅适用于实现晶圆检测,还适用于其它物品的检测。因而凡在本申请的精神和原则之内所做的任何修改、等同替换和改进等,均应包含在本申请的保护范围之内。
- 路面检测装置、利用了路面检测装置的图像显示装置、利用了路面检测装置的障碍物检测装置、路面检测方法、利用了路面检测方法的图像显示方法以及利用了路面检测方法的障碍物检测方法
- 障碍物检测装置、利用了障碍物检测装置的自动制动装置、障碍物检测方法以及利用了障碍物检测方法的自动制动方法