多输入多输出致动器和使用其的组件
文献发布时间:2023-06-19 11:57:35
相关申请的交叉引用
本申请依照美国法典第35篇第119(e)节要求2019年6月18日提交的名称为“多输入多输出致动器”的美国申请第62/862,786号和2018年12月3日提交的名称为“多输入多输出致动器”的美国申请62/774,813号的优先权。这些申请中的每一者以全文引用方式并入本文中用于所有目的。
背景技术
电动马达用于将电力转换为家用器具、电动工具和机动车辆中的机械力和/或运动。典型电动马达的成本主要取决于用于制造电动马达的原材料的成本。例如,在电动马达的线圈中使用的稀土磁体和铜通常是马达总成本的最大贡献者。为了降低机械系统的成本,通常期望使用单个马达为多个子系统提供动力。
用一个马达驱动多个子系统的一种常见方法是使用齿轮和/或开关来控制哪个子系统由马达驱动。例如,联接至马达的齿轮箱可具有多个齿轮,其中每个齿轮的输出端联接至不同的子系统。以这种方式,单个马达可以驱动两个或更多个子系统,尽管通常存在如果齿轮箱一次只能将动力传递给仅一个功能则不能同时使用这些子系统的约束。
图1A至图1C示出了在运动学上等效的致动器组件100a-100c,其可用于在轮式车辆中同时执行两个功能:推进和主动悬架。图1A中的致动器组件100a包括联接至支撑结构150的轴向磁通马达120。轴向磁通马达120包括安装至主轴124的转子121。转子121响应于由扭矩源施加在第一定子122和第二定子123上的扭矩输入而旋转。主轴124联接至参考接地11(例如,经由接触道路的车轮)。主轴124还联接至支撑结构150。支撑结构150直接联接至底盘12,底盘12包括安装在臂144a上的接头壳体142。接头壳体142相对于支撑结构150可滑动地调整。另外,弹簧152联接至接头壳体142和支撑结构150,以提供作为悬架的恢复力。
第一定子122经由节点146处的连杆145a联接至接头壳体142,并且第二定子123经由节点147处的连杆145b联接至接头壳体142。连杆145a和145b在节点143处联接至接头壳体142。为了致动悬架,向第一定子122和/或第二定子123施加反作用扭矩。继而,这导致施加至底盘12上的力,该力致使马达120沿支撑结构150相对于底盘12平移(例如,在图1A中上下移动)。
图1B示出了另一致动器组件100b,其既推进车辆又为车辆提供主动悬架。同样,底盘12经由臂144b中的狭槽149a和149b直接联接至轴向磁通马达120。狭槽149a和149b联接至在节点146处安装至第一定子122和在节点147处安装至第二定子123的销。
图1C示出了另一致动器组件100c,其提供推进和主动悬架。底盘12包括臂144c,所述臂144c分别在节点148a和148b处联接至连杆145a和145b,而不是联接至接头壳体142。连杆145a和145b分别在节点146和147处联接至第一定子122和第二定子123,如图1所示。
发明内容
图1A至图1C中的致动器组件100a-100c(统称为致动器组件100)能够旋转转子121并平移悬架。致动器组件100主要是由于它们的集成简单性而被使用,因为马达120的输出端直接联接至底盘12。然而,这些致动器组件100具有若干缺陷。首先,致动器组件100不能反映支撑结构150和底盘12之间的力/扭矩,因为施加至第一定子122和第二定子123的反作用扭矩被底盘12消散。换言之,支撑结构约束了主轴124相对于底盘的平移运动。第一定子122和第二定子123均不向图1A至1C所示的致动器组件100中的支撑结构施予扭矩负载。
这防止了致动器组件100提供额外的输出。其次,致动器组件100不是独立的机构;它们依靠与底盘12的集成来提供期望的致动。这继而意味着底盘12应具有某些结构特征,以使致动器组件100能够正确地操作。
因此,本公开涉及能够反映力/扭矩和/或与各种各样的底盘或其他参考结构兼容的致动器。示例致动器可包括马达、变速器和支撑结构(悬架)。马达可包括一个或多个扭矩源,以提供用于致动的输入扭矩。变速器可以联接和约束扭矩源,以便修改由致动器提供的所得输出力/扭矩。例如,致动器可基于一个或多个输入扭矩的叠加来提供求和的扭矩输出。变速器继而可以联接和约束扭矩源,以产生反向旋转运动。以这种方式,致动器还可基于一个或多个输入扭矩的相减来提供差动扭矩输出。
从致动器输出的力/扭矩可进一步分为各种分力/分扭矩,所述分力/分扭矩施加在将致动器连接至其他子系统的一个或多个节点上。例如,输出的力/扭矩可包括施加在致动器的支撑结构和底盘之间的反映的力/扭矩,所述反映的力/扭矩响应响应于来自致动器的其他输出的力/扭矩的不平衡而产生。反映的力/扭矩可提供又一个输出来致动子系统。例如,反映的力/扭矩可用于悬架中的防俯冲和/或防后蹲功能(例如,在向前减速期间防止车辆前部向下移动和/或在向前加速期间防止车辆后部向下移动)。
另外,致动器还可以基于一个或多个输入扭矩和/或反作用扭矩而提供不同量值和/或方向的混合输出。例如,变速器可以约束一个或多个扭矩源的运动范围和/或运动比,因而改变每个输出的力/扭矩对输入扭矩/反作用扭矩的依赖性。致动器还可并入有在输入之间创建非对称响应的机构(例如,第一扭矩源移动第二扭矩源,但是第二扭矩源无法移动第一扭矩源)。
在一个示例性应用中,致动器可以用作车辆的主动悬架系统的一部分。致动器可以是致动器组件的一部分,该致动器组件包括经由麦弗逊支柱联接至致动器的底盘和联接至致动器中的马达的车轮。车轮是非簧载质量并且底盘是簧载质量。致动器可包括经由部件将马达和/或变速器直接联接至底盘的摇杆接头机构或滑动接头机构,该部件能够相对于非簧载质量移动簧载质量。
在一个示例中,一种用于车辆的致动器包括经由悬架连接至车辆的底盘的支撑结构,联接至支撑结构的变速器,以及联接至支撑结构和变速器的马达。马达包括围绕旋转轴线旋转的转子,与旋转轴线同心的第一定子和与旋转轴线同心的第二定子。第一定子经由变速器向转子和悬架施加第一扭矩。第二定子向转子和悬架和/或底盘施加第二扭矩。
在另一示例中,一种用于车辆的致动器组件包括具有支撑结构的轴向磁通马达,限定旋转轴线并且延伸通过壳体中的开口的主轴,固定至主轴的转子,与旋转轴线同心的第一定子,以及与旋转轴线同心的第二定子。致动器组件还包括刚性地连接至支撑结构并且可压缩地联接至车辆的底盘的悬架,可旋转地联接至悬架并且可旋转地联接至第一定子和第二定子的扭杆,以及可旋转地联接至第二定子并且可旋转地联接至底盘的张紧-压缩构件。
在一个示例中,一种致动车辆的转子或悬架中的至少一者的方法包括以下步骤:(1)向转子施加第一扭矩,其中转子被配置为围绕旋转轴线旋转,(2)在施加第一扭矩的同时,向转子施加第二扭矩,(3)响应于施加第一扭矩,向第一定子施加第一反作用扭矩,所述第一定子被配置为围绕旋转轴线旋转,(4)响应于施加第二扭矩,向第二定子施加第二反作用扭矩,所述第二定子被配置为围绕旋转轴线旋转,其中第二定子经由变速器联接至第一定子,(5)经由变速器从第一定子向悬架传递第一反作用扭矩的至少一部分,以及(6)从第二定子向车辆的悬架或底盘中的至少一者传递第二反作用扭矩的至少一部分,其中底盘联接至悬架。
前述概念和下面更详细讨论的附加概念的所有组合(假设这样的概念并不相互矛盾)被认为是本文公开的发明主题的一部分。特别地,出现在本公开的结尾处的要求保护的主题的所有组合被认为是本文公开的发明主题的一部分。在本文中明确采用的并且也可能出现在通过引用并入的任何公开中的术语应被赋予与本文公开的特定概念最一致的含义。
附图说明
本领域技术人员将理解,附图主要是出于说明性目的,并且无意限制本文所述的发明主题的范围。这些附图不一定是按比例绘制的;在某些情况下,本文公开的发明主题的各个方面可能在附图中被夸大或放大示出,以促进对不同特征的理解。在附图中,相似的附图标记通常指相似的特征(例如,功能相似和/或结构相似的元件)。
图1A示出了提供车辆推进和主动悬架的第一致动器组件。
图1B示出了提供车辆推进和主动悬架的第二致动器组件。
图1C示出了提供车辆推进和主动悬架的第三致动器组件。
图2A示出了示例性致动器组件,其中定子直接联接至底盘。
图2B示出了另一示例性致动器组件,其中定子直接联接至底盘。
图3A示出了具有轴向磁通马达的示例性致动器的内侧视图。
图3B示出了图3A的致动器的后视图。
图3C示出了图3A的致动器的外侧视图。
图3D示出了图3A的致动器的透视图。
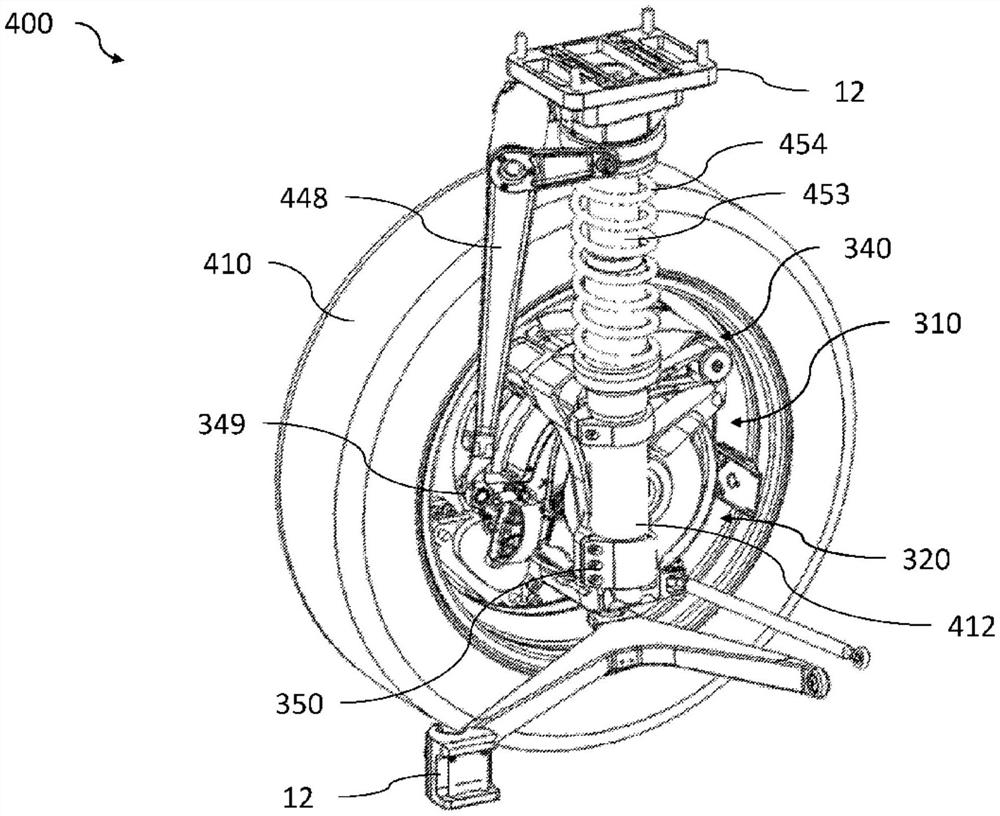
图4A示出了包括图3A的联接至麦弗逊支柱悬架的致动器的致动器组件的内侧视图。
图4B示出了图4A的致动器组件的后视图。
图4C示出了图4A的致动器组件的透视图。
图5A示出了具有潘哈德连杆和与驱动轴同轴的差速器轴的示例性致动器的透视图。
图5B示出了图5A的致动器的截面透视图。
图5C示出了图5A的致动器的后视图。
图5D示出了图5A的致动器的内侧视图。
图5E示出了图5A的致动器的截面示意图。
图6A示出了包括图5A的致动器作为轮毂马达的示例性致动器组件。
图6B示出了包括图5A的相对于车辆车轮安装在内侧的致动器的另一示例性致动器组件。
图6C示出了包括图5A的与车轮组件中的摆臂悬架集成的致动器的另一示例性致动器组件的侧视图。
图7A示出了具有锥齿轮变速器的示例性致动器的截面示意图。
图7B示出了具有双锥齿轮变速器的示例性致动器的截面示意图。
图7C示出了具有行星齿轮变速器的示例性致动器的截面示意图。
图7D示出了具有锥齿轮变速器的示例性致动器的截面示意图,其中锥齿轮设置在容纳内部定子和外部定子的支撑结构的外部。
图7E示出了具有行星齿轮变速器的示例性致动器的截面示意图,其中行星齿轮将内部定子联接至外部定子上的差速器轴。
图8A示出了具有多带轮变速器的示例性致动器。
图8B示出了具有单带轮致动变速器的示例性致动器。
图8C示出了具有双带轮致动变速器的示例性致动器。
图8D示出了具有单带轮、双皮带/缆索变速器的示例性致动器。
图8E示出了具有双斜齿轮变速器的示例性致动器的侧视图。
图8F示出了图8E的致动器的俯视图。
图9A示出了示例性致动器组件,其中变速器经由棱柱滑动接头直接联接至底盘。
图9B示出了另一示例性致动器组件,其中变速器经由摇杆接头直接联接至底盘。
图10A示出了另一示例性致动器的透视图,其中摇杆连杆和差速器轴从驱动轴偏移并与扭杆同轴。
图10B示出了图10A的致动器的截面透视图。
图10C示出了图10A的致动器的后视图。
图10D示出了图10A的致动器的内侧视图。
图10E示出了图10A的致动器的截面示意图。
图11A示出了示例性致动器的截面示意图,其中差速器轴安装至变速器中的次级锥齿轮。
图11B示出了示例性致动器的侧视图,其中双齿轮变速器直接联接至底盘。
图12A示出了包括具有基于联动装置的变速器的致动器的示例性致动器组件的正视图。
图12B示出了图12A的致动器的俯视图。
图12C示出了图12A的致动器的内侧视图。
具体实施方式
以下是对与提供用于各种子系统的一个或多个输出(例如,力、扭矩)的致动器(例如,马达、变速器和支撑结构的组件)有关的各种概念和其实施方式的更详细描述。具体地,本文描述了与变速器,马达,变速器、支撑件、马达和/或参考结构之间的联接件,以及集成致动器的致动器组件有关的各个方面。上面介绍并在下面将更详细讨论的概念可以以多种方式实施。主要出于说明性目的提供特定实施方式和应用的示例,以使本领域技术人员能够实践对本领域技术人员显而易见的实施方式和替代方式。
下文描述的附图和示例实施方式并不旨在将本实施方式的范围限制于单个实施方案。通过互换一些或全部所描述或示出的要素,其他实施方式是可能的。此外,在可以使用已知部件部分或完全实施所公开示例实施方式的某些要素的情况下,在一些情形下,仅描述了对于理解本实施方式方式所必需的这些已知部件的那些部分,并且省略了对这些已知部件的其他部分的详细描述,以免混淆本实施方式。
在下面的讨论中,提供了本发明的致动器的各种示例,其中给定的示例或一组示例展示了马达(例如,转子、定子),支撑结构和变速器(例如,扭杆、联动装置、行星齿轮、锥齿轮、皮带、带轮、齿轮系、履带驱动系统)的一个或多个具体特征。结合包括马达、壳体和变速器的致动器的给定示例所讨论的特征可以在根据本公开的致动器的其他示例中采用,使得根据本公开的给定系统中可以容易地组合本文公开的各种特征(假设这些特征彼此并非不兼容)。
通常,致动器可以基于一个或多个力/扭矩输入来致动一个或多个子系统。根据致动器如何联接至致动器组件中的其他部件,致动器的输出可以有选择地应用(例如,一次仅应用一个输出),或者可以同时应用(例如,同时应用一个或多个输出)。
在一些示例性实施方案中,致动器可包括两个扭矩源,每个扭矩源应用扭矩输入以移动第一部件(例如,使转子旋转)。对于每个扭矩输入,可将反作用扭矩施加至支撑相应扭矩源的第二部件(例如,第一定子)和第三部件(例如,第二定子)。反作用扭矩可以具有与扭矩输入相同的量值,但是沿基本相反的方向施加。因此,第一部件、第二部件和第三部件通常可以相对于彼此移动。例如,第一部件、第二部件和第三部件每者可被约束为围绕共同轴线旋转,因此各个部件可以相对于彼此旋转。第一部件、第二部件和第三部件也可以由其他机械载荷约束。因此,部件可以传递力或扭矩而不是移动。以这种方式,致动器可以提供多个输出的力/扭矩。
此外,每个输出的力/扭矩可被分为附加输出(例如,可以将力分为两个各自的力分量,每个力分量用作不同但耦合的输出)。例如,致动器可以在两个不同的节点处联接至底盘。在一个节点处,由致动器施加至底盘上的力可致使致动器竖直地平移(例如,主动悬架)。在另一个节点处,施加在致动器和底盘之间的力可以防止、减少或抵抗不必要的水平平移运动。
本文公开的致动器可包括电动马达,诸如轴向磁通马达、径向磁通马达或径向-轴向磁通马达,其具有至少两个尺寸和输出功率基本相等的扭矩源(例如,无刷直流(DC)扭矩源)。在轴向磁通马达中,每个扭矩源可以安装至相应的定子,所述定子可以响应于所施加的反作用扭矩而旋转。这两个定子可以共享一个转子,所述转子包含永磁体,所述永磁体响应由各个定子上的线圈产生的磁场。具有两个定子的单个转子的使用可以为致动器的整体操作提供额外的效率。然而,马达可包括一个以上的转子(例如,其可以每个定子包括至少一个转子)。
此外,尽管以下描述的示例性实施方案涉及一种集成在致动器组件中的致动器,该致动器组件使转子旋转和/或致动悬架(例如,在车辆上),但本发明的致动器也可以用于其他应用中。例如,致动器可以为车辆操作提供其他输出,包括但不限于行驶高度调整、转向、悬架调谐调整和/或防俯冲/防后蹲。致动器还可以用于操作车辆中涉及两种操作模式(诸如座椅调整)的其他动态系统。致动器可以使用各种类型的悬架联接至底盘,包括但不限于麦弗逊支柱,通过类似于侧倾稳定器的联动装置至底盘的扭矩连接件,或适于将旋转运动转换为线性运动的任何其他悬架。
具有能够致动两个或更多个自由度的单个致动器的益处也可能会应用到空间、材料和/或容许质量受限的其他技术中。此类应用包括但不限于用于水上交通工具的外侧转向电动推进器、喷气推进系统中的推力矢量、用于飞机机翼的多自由度致动系统、可控螺距推进器驱动器、各种机载卫星子系统的致动(例如,在立方体卫星上)、具有附加操作度的旋转平台(例如,主动相机稳定性、调整)、光学系统的稳定性控制、用于医疗工具和装置的定向和旋转部件的致动、钻探部件、多种运动能量领域的能量收集以及风力涡轮机的紧凑方位控制。
例如,致动器可以被用于作为轮内马达或者内装在车辆的簧载质量或底盘上来在提供牵引的同时调整车辆的行驶高度。在这种情况下,致动器可以安装在道路车辆的一个角部上,其中致动器的输出端中的一个联接至车轮或可旋转地连接至车轮的驱动轴。第二输出端可以联接至控制车辆的行驶高度的高度调整机构。每个车轮可以具有相应的致动器和高度调整机构。高度调整机构可包括导螺杆或滚珠螺杆,当被致动时,螺杆或滚珠螺杆使联接车辆的簧载质量和非簧载质量的弹簧(例如,主悬架弹簧或侧倾稳定器)的一端移动。另一高度调整机构可包括一个或一组齿轮,所述一个或一组齿轮联接至设置在簧载质量和非簧载质量之间的扭转弹簧。在另一个实施方案中,一种机构可以将输出轴的运动平移至活塞,从而在诸如安全气囊或液压缸的承载机构上产生压力。
具有直接联接至底盘的定子的致动器
图2A示出了致动器组件200a的一个示例,其中滑动接头变速器和定子直接联接至底盘12。如图所示,致动器组件200a包括具有马达220、变速器240a和支撑结构250的致动器210a。马达220包括转子221,转子221安装至主轴224,主轴224限定旋转轴线13。主轴224可以机械地联接至参考接地11(例如,固定至主轴224并接触道路的车轮)。马达220还包括第一定子222和第二定子223,第一定子222和第二定子223各自支撑将输入扭矩施加至转子221的扭矩源(未示出)。第一定子222和第二定子223可以经由一个或多个轴承与主轴224同轴地安装。因此,第一定子222和第二定子223可以相对于主轴224旋转。主轴224还可以联接至支撑结构250(例如,麦弗逊支柱的支柱壳体)。支撑结构250可以沿着刚性地连接至底盘12的支柱253可滑动地调整。在某些情况下,支撑结构250和支柱253可形成棱柱滑动接头。致动器组件200a还可包括弹簧254a和254b以提供恢复力,当致动器210a处于静态载荷下时,所述恢复力将支撑结构250保持在沿着支柱253的特定位置。
变速器240a可包括滑动接头壳体242,所述滑动接头壳体242将马达220联接至支撑结构250并且经由支撑结构250将横向力反作用于底盘12。如图所示,变速器240a可包括连杆245a和245b,所述连杆245a和245b的一端分别在节点246处联接至第一定子222并在节点247处联接至第二定子223,且另一端在节点243处联接至接头壳体242。连杆245a和245b可以经由销接头(或球接头)联接至节点247、246和243,以允许围绕各个节点的旋转运动同时限制平移运动。接头壳体242可为可沿支撑结构250滑动的。另外,第二定子223可以经由连杆248a直接联接至底盘12。如图所示,连杆248a还可经由销接头联接至第二定子223上的节点247以及底盘12。连杆248a可以是刚性或顺应性的张紧-压缩构件。
联接至第一定子222和第二定子223的扭矩源可以彼此独立地产生输入扭矩。然而,第一定子222和第二定子223可以经由变速器240a彼此联接。此外,致动器210a在三个位置(即,转子221至参考接地11、支撑结构250经由支柱253至底盘12,以及第二定子223经由连杆248a至底盘12)联接至致动器组件200a的其他部件。因此,致动器210a可提供用于两个独立输入的多达三个力/扭矩输出。
输入扭矩和反作用扭矩
如上所述,本文所述的致动器可以提供多个输出以机械地致动系统(例如,车辆)的各个子系统(例如,旋转车轮、致动悬架)。相对于图2A中描绘的致动器组件200a,致动器210a可提供多个力和/或扭矩输出以便(1)使转子221旋转(例如,旋转联接至转子的车轮以进行推进)和/或(2)通过沿支柱253滑动地调整支撑结构250来使致动器210a相对于底盘12和/或参考接地11平移(例如,致动悬架)和/或基于第一定子222和第二定子223之间的多余力来补偿系统中不期望的力和/或运动(例如,在车辆制动时提供防俯冲和/或在车辆加速时提供防后蹲功能以提高车辆稳定性和/或操作者舒适性)。在该示例中,由施加至致动器210a的第一定子222和第二定子223的反作用扭矩产生的多余力可以被分成沿不同方向施加的两个力分量(例如,两个正交力分量)。两个力分量的量值和/或方向可以耦合。此外,多余力可以经由连杆248a作为非零力和/或经由支撑结构250在(1)连杆248a和(2)支柱253处作为单独的分力来施加。
在一种情况下,联接至第一定子222的扭矩源可产生输入扭矩,所述输入扭矩被施加至转子221,同时联接至第二定子223的扭矩源保持无效。输入扭矩可致使转子221相对于参考接地11围绕旋转轴线13旋转。当第一定子222产生输入扭矩时,也产生相应的反作用扭矩并将其施加至第一定子222。反作用扭矩和输入扭矩的量值可以基本相等,但是沿之施加扭矩的方向可以基本相反。例如,施加至转子221的输入扭矩可以沿着顺时针方向,而施加至第一定子222的反作用扭矩可以沿着逆时针方向。
施加至第一定子222的反作用扭矩可致使第一定子222围绕旋转轴线13旋转。然而,第一定子222的运动可能受到变速器240a的连杆245a的约束,所述连杆在节点246处联接至第一定子222。换言之,施加至第一定子222的反作用扭矩的至少一部分可以经由连杆245a传递到变速器240a。传递到变速器240a的那部分反作用扭矩可致使接头壳体242沿支撑结构250滑动和/或经由连杆245b传递到第二定子223。
如果第二定子223与底盘12分离,则反作用扭矩将致使第一定子222和第二定子223围绕旋转轴线13沿相反方向旋转,同时变速器240a中的接头壳体242将沿支撑结构250滑动。随着第二定子223与底盘12之间的连杆248a的移除,底盘12与致动器210之间的任何力将经由支撑结构250通过悬架施加。定子222将惯性地加速自身并拉动变速器240a。支撑结构250将提供变速器240a所需的扭矩耦合,以经由连杆245b惯性地加速定子223。主轴224将把来自参考接地面11的力以及来自定子惯性负载的耦合力反作用至支撑结构,其继而将由悬架反作用。
然而,通过经由连杆248a将第二定子223联接至底盘12,在致动器210a与底盘12之间施予了净力,所述净力致使致动器210a沿着支柱253平移(即,朝向或远离参考接地11)。参考图2A中所示的致动器组件200a的视图,如果反作用扭矩围绕旋转轴线13沿顺时针方向施加至第一定子222,则致动器210a朝向参考接地11平移。相反,如果反作用扭矩围绕旋转轴线13沿逆时针方向施加,则致动器210a远离参考接地11平移。
在另一种情况下,联接至第二定子223的扭矩源可产生输入扭矩,所述输入扭矩被施加至转子221,同时联接至第一定子222的扭矩源保持无效。类似于先前的情况,输入扭矩可致使转子221相对于参考接地11围绕旋转轴线13旋转。相应的反作用扭矩(与输入扭矩量值类似但以相反的方向施加)也可以施加至第二定子223。然而,在这种情况下,反作用扭矩可以通过连杆248a直接传递至底盘12,而不是经由变速器240a间接传递。反作用扭矩可初始致使变速器240a的致动和第一定子222的旋转。然而,在稳态条件下,施加至第二定子223的反作用扭矩可以主要经由连杆248a传递到底盘12。类似于先前的情况,反作用扭矩可基于支撑结构250沿支柱253的平移而致使致动器210a朝向或远离参考接地11平移。
对于上述情况,可以部分地通过调整由转子221上的第一定子222和第二定子223所施予的扭矩的量值和/或方向来控制由致动器210a产生的输出的力和扭矩的量值和方向。然而,仅经由第一定子222或第二定子223施予扭矩可能会致使输出的力/扭矩同时发生,这可能是不期望的。例如,可能优选的是在不引起致动器210a相对于底盘12平移的情况下旋转联接至转子221和主轴224的车轮。对于这种情况,致动器210a可以通过同时向第一定子222和第二定子223施予扭矩来提供某些输出。
在某些情况下,致动器可能会叠加由扭矩源生成的输入扭矩和/或反作用扭矩以产生求和扭矩和差动扭矩,这些扭矩选择性地控制哪些输出由致动器提供。对于图2A中所示的致动器210a,由第一定子222和第二定子223沿相同方向施予的输入扭矩致使转子221沿相反方向旋转。因此,由转子221所经历的扭矩可被视为所施予的扭矩的矢量和,而忽略摩擦和机械增益(在下面讨论)。同时,变速器240a所经历的扭矩可被视为所施予的扭矩的矢量差,同样忽略摩擦和机械增益。变速器240a所经历的机械增益可以提供能够用作来自致动器210a的附加输出的多余力(例如,用于防俯冲、防后蹲功能)。
例如,第一定子222和第二定子223可以施予具有相同量值和方向的输入扭矩。因此,求和的扭矩可以具有输入扭矩的量值的两倍,从而致使转子221围绕旋转轴线13旋转。施加至第一定子222和第二定子223的反作用扭矩类似地具有相同的量值并且以与输入扭矩相反的方向施加。相反,在支撑结构250和安装至底盘12的支柱253之间产生反作用力。
在另一示例中,第一定子222和第二定子223可以将具有相同量值的相反方向的输入扭矩施加至转子221。在这种情况下,输入扭矩阻碍转子221的旋转(即,输入扭矩彼此抵消)。施加至第一定子222和第二定子223的所得反作用扭矩类似地具有相同的量值,但是相对于旋转轴线13沿相反的方向施加。因此,反作用扭矩致使变速器240a致动和/或净差动扭矩输出(即,差动扭矩对各个反作用扭矩具有相长干涉)。这继而导致致动器210a沿着支柱253平移(致动悬架)。
通常,第一定子222和第二定子223可提供具有变化的量值和方向的输入扭矩。因此,由致动器210a提供的输出的力/扭矩的相对量值可基于输入扭矩以及相应的反作用扭矩的量值和/或方向而改变。一般而言,对致动器210a中一个或两个输入扭矩的量值和/或方向进行调整可能致使以下输出中的一个或多个发生:(1)旋转转子221,(2)沿支柱253平移致动器210a,以及(3)在支撑结构250和支柱253之间产生反作用力。由致动器210a提供的输出的力/扭矩的中的一个或多个的相对量值和/或方向可以相对于输入扭矩以基本上连续的(或离散的)方式进行调整。例如,输入扭矩的量值和/或方向的连续变化导致输出的力/扭矩的连续变化。
机械增益和运动比
另外,变速器240a可以提供机械增益,其可以量化为取决于第一定子222和第二定子223的相对位置的运动比。运动比取决于马达220、变速器240a、支撑结构250的结构以及这些部件及其子部件之间的连接,包括连杆长度和形状以及节点位置。在图2A中,例如,致动器210a中的连杆245a和245b具有相同的长度,并且对称地联接至与旋转轴线13的径向距离相似的节点247和246。因此,第一定子222的旋转致使第二定子223以1:1的运动比旋转。
在其他实施方案中,连杆245a和245b的几何形状和/或节点247和246的位置可以改变,以在第一定子222和第二定子223之间产生不同的运动比,从而改变来自致动器210a的每个输出的力/扭矩对第一定子222和/或第二定子223的输入扭矩的依赖性。例如,变速器240a可被配置为使得施加至第一定子222的反作用扭矩比施加至第二定子223的反作用扭矩在致动器210a和底盘12之间产生更大的扭矩(例如,第一定子222可以以与在车辆变速器中产生更大扭矩的较低挡位类似的方式起作用)。替代地,施加至第二定子223的反作用扭矩可以比施加至第一定子222的反作用扭矩在致动器210a和底盘12之间产生更快的致动速率(例如,第二定子223可以以与在车辆变速器中允许更高转速的较高挡位类似的方式起作用)。
在另一示例中,可以修改第一定子222和第二定子223的运动范围以使输出的力/扭矩部分地取决于第一定子222和第二定子223的角位置。例如,可以将机械止挡件结合到致动器210a中,所述机械止挡件限制第一定子222和第二定子223的旋转范围。机械止挡件可以限定致动器210a能够在特定节点处产生差动扭矩输出的角度范围。机械止挡件可以联接至支撑结构250。以这种方式,可以选择致动器210a的几何形状及其内部和外部连接件,以调整由致动器210a产生的各种输出的力/扭矩。
变速器240a还可在第一定子222和第二定子223之间产生非对称响应。例如,第二定子223可以响应于施加至第一定子222的反作用扭矩而旋转,但是第一定子222可以响应于施加至第二定子223的反作用扭矩而不旋转。例如,这可以通过使用棘轮机构来实现,所述棘轮机构仅允许第一定子222沿一个方向(例如,仅顺时针、仅逆时针)旋转,而第二定子223沿一个或多个方向(例如,顺时针和逆时针)自由地旋转。第一定子222和第二定子223之间的非对称响应可以提供另一参数来修改输出的力/扭矩对输入扭矩和/或反作用扭矩的依赖性。两个定子之间的运动比不必是恒定的或线性的。
定子经由摇杆接头联接至底盘的致动器
图2B示出了另一示例性致动器组件200b,其中摇杆接头变速器240b和定子直接联接至底盘12。如图所示,致动器组件200b与图2A的致动器组件200a共享若干相似之处。如图2A所示,致动器组件200b包括马达220、变速器240b和支撑结构250。马达220包括转子221,所述转子221联接至限定旋转轴线13的主轴224。主轴224同样联接至参考接地11。马达220也包括第一定子222和第二定子223,第一定子222和第二定子223各自支撑扭矩源并且与主轴224同轴。主轴224由支撑结构250(例如,支柱壳体)支撑,所述支承结构250可沿刚性地安装至底盘12的支柱253滑动地调整。弹簧254a和254b可用于向致动器210b提供恢复力。
在这种情况下,摇杆接头变速器240b包括围绕节点243旋转的摇杆接头臂244。如图所示,变速器240b包括经由各自的销接头(或球接头)在节点246处联接至第一定子222的连杆245a和在节点247处联接至第二定子223的连杆245b。连杆245a和245b联接至摇杆接头臂244,所述摇杆接头臂244继而在节点243处联接至支撑结构250。摇杆接头臂244可以经由各自的销接头(或球接头)联接至连杆245a和245b以及支撑结构250。
第二定子223也通过在节点249处联接至第二定子223的连杆248b直接联接至底盘12。这里,节点249不与节点247并置。而是,它是径向偏移的,例如,利用如图2B所示的凸轮。可以选择连杆248b的长度和节点249的(径向)位置,以在第二定子223的旋转与支撑结构250的平移之间提供期望的运动比。
致动器组件200b可以以与致动器组件200a相似的方式操作,其中变速器240a可以被视为变速器240b的瞬时线性化。第一定子222和第二定子223上的扭矩源可各自产生施加至转子221的输入扭矩,从而致使转子221相对于参考接地11围绕旋转轴线13旋转。每个扭矩源可以产生施加至第一定子222和第二定子223的相应的反作用扭矩。对于第二定子223,所施加的反作用扭矩可以经由连杆248b直接传递至底盘12,其继而可以致使致动器210b沿着支柱253远离或朝向参考接地11平移。
对于第一定子222,所施加的反作用扭矩可以经由连杆245a传递至摇杆接头臂244。这继而可致使摇杆接头臂244相对于支撑结构250围绕节点243旋转。然而,由将第二定子223联接至底盘12的连杆248b所施加的约束可替代地致使从第一定子222传递至变速器240b的反作用扭矩的至少一部分经由连杆245b传递至第二定子223。然后,该反作用扭矩可在致动器210b与底盘12之间产生净力或净扭矩,从而致使致动器210b经由支撑结构250沿支柱253平移。反作用力/扭矩也可以在支撑结构250和底盘12之间施加,其可以用作另一输出(例如,防俯冲、防后蹲)。
摇杆接头臂244的几何形状可以被修改以调整每个输出的力/扭矩对由第一定子222和第二定子223上的扭矩源产生的各自的输入扭矩和/或反作用扭矩的依懒性。例如,摇杆接头臂244的长度可以影响第一定子222和/或第二定子223的角旋转范围。摇杆接头臂244的定向(其可能取决于节点247和246的相应位置以及连杆245a和245b的长度)也可能影响通过变速器240b施加至支撑结构250的反作用力的方向。例如,摇杆接头臂244可以是细长构件,其中力主要沿着臂的长度传递(横向力更可能致使摇杆接头臂244旋转)。
具有潘哈德连杆以及同轴驱动轴和差速器轴的轴向磁通马达
图3A至图3D示出了在运动学上等同于图2B的致动器210b的示例性致动器310的若干视图。如图所示,致动器310可包括轴向磁通马达320。马达320包括安装在主轴324上的转子321。马达320还包括第一定子322和第二定子323,所述第一定子322和第二定子323被主轴324同轴地约束并且设置在转子321的相对侧上。如图所示,第一定子322和第二定子323可各自联接至各自的壳体,它们一起形成基本封闭的腔体以容纳转子321,同时仍允许第一定子322和第二定子323之间的旋转运动。
第一定子322和第二定子323各自包括扭矩源,所述扭矩源包括设置在转子321或相应定子上的一个或多个磁体以及设置在转子321或相应定子上与一个或多个磁体相对的一个或多个线圈。经由相关联的电子器件(未示出)施加至一个或多个线圈的电流产生磁场,所述磁场继而与一个或多个磁体的永久磁场相互作用,从而致使转子321(和/或定子)旋转。对于该轴向磁通马达310,磁体和线圈分别安装在转子321和定子的表面上。马达320也可以是径向磁通马达(其中一个或多个磁体和线圈安装在外围(例如,转子321的外边缘、围绕转子321的定子的内边缘))或组合的径向-轴向磁通马达。
致动器310可包括向马达320和变速器340提供机械支撑的支撑结构350。如前所述,支撑结构250可以相对于致动器310的参考框架保持静止。换言之,支撑结构350不相对于马达320和变速器340移动,而是相对于参考接地或底盘移动。如图所示,支撑结构350可以在约束其他自由度的同时允许主轴324旋转。支撑结构250还可限定开口311,以将支撑结构350联接至支柱壳体(参见图4A至图4C)。如图所示,开口311可以成形为允许插入支柱壳体。可以使用一个或多个紧固件将支撑结构350牢固地联接至支柱壳体。
变速器340可包括在节点346处联接至第一定子322的第一弓形连杆345a和在节点347处联接至第二定子323的第二弓形连杆354b。连杆345a和345b联接至扭杆344,所述扭杆344相对于支撑结构350沿着通过节点343的旋转轴线旋转。扭杆344可设置在支撑结构350中的开口内,所述开口允许扭杆344旋转,同时约束扭杆的其他自由度。在该示例中,支撑结构350将扭杆的质心的运动约束为相对于支撑结构350特定的弧度。
像图2B中的致动器210b一样,图3中的致动器310被配置为产生施加至转子321的求和扭矩和差动扭矩输出。这些输出的力/扭矩可用于致动各种子系统。例如,求和的扭矩可以使驱动轴旋转,所述驱动轴继而使车轮旋转。并且差动扭矩可以致动主动悬架系统。
图4A至图4C示出了结合有图3A至图3D的致动器310的致动器组件400的若干视图。如图所示,致动器310被集成到悬架系统中,其中致动器310利用求和的扭矩来旋转联接至主轴324的车轮410。差动扭矩用于致动联接至底盘12的悬架。
图4A至图4C示出了经由开口311联接至支柱壳体412的致动器310的支撑结构350。支柱壳体412可沿着联接至底盘12的支柱453滑动地调整。弹簧454沿着支柱453设置并且联接至底盘12和支撑结构350,以在致动悬架时提供恢复力。致动器组件400还包括连杆448(示为张紧-压缩构件或推杆),所述连杆448在节点349处将第二定子323联接至底盘12。如图所示,连杆448可以经由各自的球接头联接至第二定子323和底盘12。致动器组件400还可包括下部控制臂482和横拉杆480,所述下部控制臂482和横拉杆480的一端各自联接至底盘12,而另一端联接至支撑结构350。下控制臂482和横拉杆480还可以约束支撑结构350的运动学运动。因此,支柱壳体412、支柱453、下部控制臂482和横拉杆480一起形成麦弗逊支柱悬架。
施加至第一定子322和第二定子323的反作用扭矩可以产生多余力,所述多余力可以沿着连杆448传递到底盘12,以经由支柱壳体412沿着支柱453平移致动器310和/或当车辆制动或加速时分别防止致动器310的压缩或伸展。如上所述,反作用力/扭矩可以在支柱壳体412和支柱453之间产生,其可以提供另一输出(例如,对力分量产生反作用)。
具有摇杆连杆以及偏置驱动轴和差速器轴的轴向磁通马达
图5A至图5E示出了另一示例性致动器510,其中变速器540具有摇杆连杆,所述摇杆连杆约束轴向磁通马达520中的第一定子522和第二定子523的运动。类似于致动器310,变速器540包括扭杆544,所述扭杆544是由支撑结构550约束以沿平行于主轴524的旋转轴线的轴线旋转的机械刚性部件。扭杆544在节点546处经由连杆545a联接至第一定子522,并且在节点547处经由连杆545b联接至第二定子523。连杆545a和545b在它们各自的接头处可自由地旋转。支撑结构550可被安装至悬挂或负载反作用的参考框架(例如,车辆底盘)。对于这种情况,第二定子523可以经由第二定子523上的差速器轴562在节点549处联接至外部子系统。差速器轴562可围绕与转子521和主轴524相同的旋转轴线旋转。与致动器310相比,致动器510以类似的方式操作,除了经由差速器轴562输出差动扭矩而不是作为通过连杆或推杆构件(例如,连杆448)的力之外。
图6A示出了示例性致动器组件600a,其并入了图5A至图5E的致动器510作为轮毂马达。如图所示,施加至转子521的求和扭矩可使安装至主轴524的车轮410旋转。由差速器轴562提供的差动扭矩可以被施加至扭矩轴610。以这种方式,致动器510不直接产生力/扭矩输出来致动来自非簧载质量的底盘12,而是经由内侧的扭矩轴610将差动扭矩作为纯扭矩传递至底盘12。传递至扭矩轴610的扭矩可用于致动其他子系统(例如,经由另一机构致动悬架)。致动器组件600a还包括形成悬架的一部分的下部A形臂682、上部A形臂684和横拉杆680。A形臂682和684以及横拉杆680联接至底盘12和支撑结构550(支撑结构550的臂682和684以及横拉杆680所联接的部分未示出)。
图6B示出了另一示例性致动器组件600b,其中致动器510安装在车辆的簧载质量或底盘12的内侧。如图所示,致动器组件600b包括驱动轴624,所述驱动轴624将马达520的主轴524联接至车轮410。因此,施加至转子521的求和扭矩可用于经由驱动轴624使车轮410旋转。差速器轴562联接至联动装置620,所述联动装置620将差动扭矩传递至致动构件622,所述致动构件622可以联接至其他子系统(例如,致动悬架机构)。
图6C示出了另一示例性致动器组件600c,其中图3A至图3D的致动器310被并入至摆臂悬架中。摆臂悬架通常用于各种类型的车辆中,包括但不限于摩托车、自行车和踏板车。如图所示,致动器310可以安装至支撑框架630,所述支撑框架630可以具有支撑车轮410的两侧的叉。支撑框架630继而可以经由臂632(例如,前臂、后臂)安装至底盘12,所述臂632可旋转地联接至支撑框架630和底盘12。臂632可以约束车轮的质心沿着弯曲的路径(例如,圆弧)行进。支撑框架630也可以经由减振器634联接至底盘12以提供悬架。减振器634可以经由销接头联接至支撑框架630。致动器310可以经由杆636联接至底盘12,所述杆636可旋转地联接至底盘12和致动器310。
因此,杆636可由致动器310致动(例如,差动扭矩),使得杆636致使支柱634收缩或伸展。变速器340可以经由连杆345a和345b以及扭杆344将第一定子322联接至第二定子323,从而允许将反作用扭矩从第一定子322传递至第二定子323(或反之亦然)。因此,杆636可以连接至第一定子322或第二定子323。
带锥齿轮变速器的轴向磁通马达
图7A示出了具有锥齿轮变速器740a的另一示例性致动器710a。如图所示,致动器710a可包括轴向磁通马达720,其中转子721安装至主轴724。马达720可包括第一定子722a和第二定子723a,所述第一定子722a和第二定子723a设置在转子721的相对侧上,并且经由一个或多个轴承(每个轴承都用“X”表示为圆圈)同轴地约束以围绕主轴724旋转。马达720可以由支撑结构750支撑和包围。变速器740a可以经由锥齿轮748a将第一定子722a联接至第二定子723a。锥齿轮748a可经由一个或多个轴承在节点743处相对于支撑结构750旋转。通常,可仅使用一个锥齿轮748a;然而,图7A示出了包括两个锥齿轮748a以提供附加机械支撑的变速器740a。
锥齿轮748a可包括与在节点746处的第一定子722a上和在节点747处的第二定子723a上的相应齿轮齿啮合的一个或多个齿轮齿。因此,第一定子722a响应于反作用扭矩的旋转致使锥齿轮748a旋转,这继而致使第二定子723a沿相反方向旋转。以这种方式,锥齿轮变速器740a提供第一定子722a和第二定子723a之间的反向旋转。因此,致动器710a以与图2B所示的致动器210b相同的方式运动性操作。可施加求和扭矩以使转子721旋转,并且可在固定至第二定子723a的差速器轴762处输出差动扭矩。反作用力/扭矩可以经由锥齿轮748a施加至支撑结构750。
图7B示出了另一示例性致动器710b,其具有带有双锥齿轮机构的变速器740b。变速器740b包括双锥齿轮748b,所述双锥齿轮748b经由安装至同一主轴724的独立的锥齿轮与第一定子722b和第二定子723b啮合。基于双锥齿轮748b中锥齿轮的相对尺寸和/或距主轴轴线13的相对齿直径,双锥齿轮748b可允许第一定子722b和第二定子723b之间的不同运动比。例如,联接至第一定子722b的齿轮可以大于联接至第二定子723b的齿轮,这导致在第一定子722b和双锥齿轮748b之间传递的扭矩增大和/或第二定子723b和双锥齿轮748b之间的转速增大。
图7C示出了另一示例性致动器710c,其具有带有行星齿轮机构的变速器740c。在这种情况下,变速器740c可包括行星齿轮748c,所述行星齿轮748c围绕平行于主轴724的旋转轴线的旋转轴线旋转。如图所示,支撑结构750可以约束行星齿轮748c的其他平移和旋转自由度。致动器710c可以以与图7A的致动器710a相似的方式操作。
图7D示出了另一示例性致动器710d,其中变速器740d包括锥齿轮机构,所述锥齿轮机构容纳在来自马达720的支撑结构750中,所述马达720设置在支撑结构750中。在这种情况下,第一定子722d安装至传递差动扭矩的差速器轴764。转子721和第二定子723d与差速器轴764同轴。转子721还包括联接至转子框架726的驱动轴(主轴)724,所述转子框架726部分地包围第一定子722d。致动器710d以与图7A的致动器710a相似的方式操作,其中变速器740d包括与第一定子722d和第二定子723d啮合的锥齿轮748d。然而,在这种情况下,第二定子723d经由变速器740d将反作用扭矩传递至第一定子722d。
图7E示出了另一示例性致动器710e,其中变速器740e包括行星齿轮机构,并且第一定子722e经由差速器轴764输出差动扭矩。致动器710e类似于致动器710d,除了锥齿轮748d被行星齿轮748e代替以联接第一定子722e和第二定子723e之外。如图所示,行星齿轮748e可围绕平行于差速器轴764的旋转轴线的轴线旋转,并且可以其他方式沿其他平移和旋转自由度被支撑结构750约束。
具有带轮变速器的轴向磁通马达
图8A示出了使用皮带机构来传递反作用扭矩的示例性变速器840a。如图所示,第一定子822可联接至安装至轴的带轮832。第二定子823可联接至带轮831,所述带轮831经由一个或多个轴承安装至围绕第一定子822同心旋转的轴。带轮831和832可以分别经由皮带836和838联接至主带轮830。主带轮830可以联接至支撑结构850并由其约束。因此,第二定子823的旋转经由皮带836致使主带轮830旋转,这继而致使第一定子822经由皮带838沿相反方向旋转。以这种方式,变速器840a可以提供与图2A至图7E的变速器相似的功能。变速器840a还可包括惰轮834以引导皮带838和/或向皮带838提供张力。
惰轮834可由支撑结构850平移地约束。此外,链条和/或缆索可以代替皮带836和838。皮带836和838可以依靠与相应的带轮的摩擦接触来传递扭矩。因此,皮带836和838的尺寸和/或变速器840a的结构可以被调适以增加皮带836和838与相应的带轮之间的接触面积以减小打滑。在某些情况下,皮带836和838可具有与带轮上相应的齿啮合的齿,以进一步减少打滑。然而,在某些情况下,皮带836和皮带838以受控的方式滑动可能是优选的。
图8B示出了具有单个带轮变速器840b的示例性致动器810b。如图所示,致动器810b可包括围绕相同的旋转轴线旋转的第一定子822和第二定子823。变速器810b可包括皮带843,其一端在节点846处联接至第一定子822,且另一端在节点847处联接至第二定子823。皮带843可以由设置在第一定子822和第二定子823之间的带轮842引导。因此,当第一定子822旋转时,皮带843沿着第一定子822被拉动。这继而沿皮带843产生张力,所述张力致使带轮842和第二定子823响应地旋转。特别地,第二定子823沿与第一定子822相反的方向旋转。对于此设计,可以调适皮带843的长度,以调整第一定子822和第二定子823的角位移范围。
图8C示出了具有双带轮变速器840c的示例性致动器810c。如图所示,变速器840c可包括均用于引导皮带845的带轮844a和844b。不同于图8B中致动器810b中的皮带843,致动器810c中的皮带845未固定至第一定子822或第二定子823。而是,皮带845以张紧状态缠绕在第一定子822、第二定子823以及带轮844a和844b上。然而,通过在第一定子822和第二定子823之间提供反向旋转运动,致动器810c以与致动器810b相似的方式操作。对于该设计,皮带845的长度可以受到第一定子822、第二定子823以及带轮844a和844b的尺寸和布局的约束。
图8D示出了具有单带轮、双皮带变速器840d的示例性致动器840d。如图所示,变速器840d可包括圆柱形带轮846,所述圆柱形带轮846围绕平行于第一定子822和第二定子823的旋转轴线的旋转轴线旋转。对于此设计,变速器840d包括将第一定子822联接至带轮846的皮带849a以及将第二定子823联接至带轮846的皮带849b。可以使皮带849a扭曲以形成缠绕在带轮846上的附加环路,以使变速器840d在第一定子822和第二定子823之间提供反向旋转运动。在某些情况下,皮带849a和849b中的一者或两者可以固定至它们各自的定子,以便约束旋转范围。
图8E和图8F示出了具有双斜齿轮变速器840e的示例性致动器810e的若干视图。如图所示,变速器840e可包括相对于支撑结构850旋转的斜齿轮860和862。斜齿轮860和862可以啮合,从而致使齿轮860和862之间的反向旋转运动。第一定子822可以经由皮带866联接至斜齿轮860,所述皮带866由安装至斜齿轮860的带轮引导。类似地,第二定子823可以经由皮带868联接至斜齿轮862,所述皮带868由安装至斜齿轮862的带轮引导。因此,当第一定子822旋转时,皮带866被拉动,其产生张力,所述张力致使斜齿轮860旋转。这继而经由皮带868致使斜齿轮862和第二定子823沿相反方向旋转。皮带866和皮带868可各自经由惰轮864保持张紧。惰轮864可以由支撑结构850约束以围绕平行于斜齿轮860和862的轴线旋转。
具有联接至底盘的变速器的示例性致动器
图9A示出了具有滑动接头变速器940a的致动器组件900a,其中变速器940a直接联接至底盘12。如图所示,致动器组件900a包括具有马达920、变速器940a和支撑结构950的致动器910a。如前所述,马达920包括转子921,所述转子921安装至主轴924,所述主轴924限定旋转轴线13。主轴924可以机械地联接至参考接地11(例如,经由道路上的车轮)。马达920还包括第一定子922和第二定子923,所述第一定子922和第二定子923各自支撑扭矩源(未示出)以向转子921施加扭矩。第一定子922和第二定子923可以经由一个或多个轴承同轴地约束至主轴924。主轴924还可以联接至支撑结构950。支撑结构950可以沿着刚性地连接至底盘12的支柱953可滑动地调整。如前所述,致动器组件900a可包括弹簧954a和954b,以为致动器910a提供恢复力。
变速器940a还可以以与先前实施方案类似的方式联接至第一定子922和第二定子923。变速器940a可包括连杆945a,其将节点946处的第一定子922联接至节点943处的接头壳体942;以及连杆945b,其将节点2204处的第二定子923联接至接头壳体942。连杆945a和945b可以经由销接头(或球接头)联接至定子和接头壳体942。在该实施方案中,变速器940a经由连杆948在节点949处直接联接至底盘12,这改变了反作用扭矩在致动器910a中的传递方式。例如,当反作用扭矩施加至第一定子922时,反作用扭矩的至少一部分经由连杆945a传递到接头壳体942。这继而致使接头壳体942沿着支撑结构950滑动。然而,由于接头壳体942直接联接至底盘12,所以反作用扭矩主要从变速器940a传递至底盘12(而不是传递至第二定子923)。施加至第二定子923的反作用扭矩提供类似的行为。由于第二定子923不从第一定子922接收反作用扭矩,因此当从各个扭矩源施加相似的反作用扭矩时,第一定子922和第二定子923可以以对称的方式加载。
然而,致动器910a可以以与先前实施方案类似的方式进行操作。输入扭矩可以表示为施加至转子921的矢量求和的扭矩。变速器940a引起第一定子922和第二定子923之间的反向旋转,因此反作用扭矩可以表示为差动扭矩输出。差动扭矩可以沿着连杆948在变速器940a和底盘12之间产生力,所述力致使致动器910a沿着支柱953平移。此外,差动扭矩可以在致动器910a的支撑结构950和支柱953之间产生反作用力/扭矩,其可以用作附加输出(例如,用于防俯冲、防后蹲)。
图9B示出了另一示例性致动器组件900b,其中变速器940b包括摇杆接头并且直接联接至底盘12。类似于致动器210b,变速器940b可包括摇杆接头臂944,所述摇杆接头臂944联接至连杆945a和945b以及支撑结构950上的节点943。另外,摇杆接头臂944也可以经由连杆948在节点949处直接联接至底盘12。然而,变速器940b可以以与致动器210b相似的方式操作,并且致动器组件900b可以以与致动器910a相似的方式传递扭矩。
图10A至图10E示出了具有变速器1040的示例性致动器1010的若干视图,所述变速器1040具有也提供差动扭矩输出的潘哈德连杆。致动器1010在运动学上类似于致动器910b,并且因此以相似的方式操作。(除非另有说明,否则具有相同结尾数字的附图标记在运动学上是等同的,例如,图9B中的转子921在运动学上等同于图10E中的转子1021。)如图所示,变速器1010c包括联接至扭杆1044的连杆1045a和1045b。在这种情况下,差速器轴1062直接联接至扭杆。因此,施加至第一定子1022和第二定子1023的反作用扭矩可以通过扭杆传递作为输出。
图11A示出了另一示例性致动器1110a,其中变速器1140a具有直接输出差动扭矩的锥齿轮机构。致动器1110也在运动学上类似于图9B的致动器910b,并且因此以相似的方式操作。(同样,除非另有说明,否则具有相同结尾数字的附图标记在运动学上是等同的。)变速器1140b包括锥齿轮1148a,所述锥齿轮1148a与第一定子1122和第二定子1123啮合以在第一定子1122和第二定子1123之间产生反向旋转运动。然而,在这种情况下,锥齿轮1148a包括辅助齿轮,所述辅助齿轮与支撑差速器轴2350的次级锥齿轮1148b啮合。以这种方式,第一定子1122和/或第二定子1123的旋转致使锥齿轮1148a旋转,这继而致使次级锥齿轮1148b旋转,从而在节点1149处输出差动扭矩。
图11B示出了另一示例性致动器1110b,其中双齿轮变速器1140b联接至底盘12。如图所示,变速器1140b可包括与第一定子1122啮合的第一齿轮1160和与第二定子1123啮合的第二齿轮1162。第一齿轮1160和第二齿轮1162也可啮合在一起,从而在第一定子1122和第二定子1123之间产生反向旋转运动。第一齿轮1160和第二齿轮1162可以由支撑结构1150支撑。另外,第二齿轮1162可以经由联动装置1148c联接至底盘12。因此,传递到第一齿轮1160和/或第二齿轮1162的反作用扭矩然后可经由联动装置1148c传递到底盘12,以便产生使致动器1110b相对于底盘12平移的致动力。致动器1110b也在运动学上类似于图9B中的致动器910b。
图12A至图12C示出了输出平移运动和/或力而不是差动扭矩的示例性致动器组件1200的若干视图。在这种情况下,致动器1210在运动学上等同于图9A中的致动器910a。致动器1210可包括变速器1240,所述变速器1240约束第一定子1222和第二定子1223以反向旋转。变速器1240可包括滑动接头1274,所述滑动接头1274经由联动装置1272联接至底盘12。滑动接头1274可以沿着联接至支撑结构1250的支柱1270可滑动地调整。滑动接头1274也可以安装在臂1276上,所述臂1276可沿着与滑动接头1274相对于支柱1270移动所沿着的轴线基本正交的轴线相对于支撑结构1250滑动地调整。以这种方式,支柱1270和臂1276约束致动器1210相对于底盘12平移(而不是旋转)。
在图8A至图8F中描绘的变速器可以容易地结合到致动器中,其中变速器直接联接至底盘12。这可以部分地通过将差速器轴添加到变速器中的部件中的一个来实现。例如,差速器轴可以设置在图8A至图8F所示的基于带轮的变速器中的带轮中的一个上,其继而可以直接联接至底盘12。
结论
本文所述的所有参数、尺寸、材料和配置仅是示例性的,并且实际参数、尺寸、材料和/或配置将取决于本发明的教导所使用的特定的一个或多个应用。应当理解,前述实施方案主要是通过示例的方式呈现的,并且在所附权利要求及其等同物的范围内,可以以不同于具体描述和要求保护的方式来实践本发明的实施方案。本公开的发明实施方案涉及本文所述的每个单独的特征、系统、制品、材料、套件和/或方法。
此外,两个或更多个此类特征、系统、制品、材料、套件和/或方法的任何组合包括在本公开的发明范围内,只要这些特征、系统、制品、材料、套件和/或方法不相互矛盾。在不背离本公开的范围的前提下,也可对示例性实施方案的相应要素的设计、工况和布置进行其他替换、修改、改变和删减。数值范围的使用并不排除以相同方式实现相同功能以产生相同结果的超出范围的等效物。
而且,各种发明构思可以体现为一种或多种方法,其中已经提供了至少一个示例。在某些情况下,作为方法的一部分执行的动作可能会以不同的方式进行排序。因此,在一些发明实施方式中,给定方法的各个动作可以以与具体示出的顺序不同的顺序执行,其可包括同时执行一些动作(即使在说明性实施方案中这种动作被示为顺序动作)。
本文涉及的所有公开、专利申请、专利和其他参考文献以其整体通过引用并入本文。
如本文限定和使用的所有定义都应理解为具有字典定义、通过引用并入的文档中的定义和/或限定术语的普通含义。
除非明确相反地指出,否则本文在说明书和权利要求中使用的不定冠词“一个”和“一种”应理解为意指“至少一个”。
如本文在说明书和权利要求中使用的短语“和/或”应理解为意指这样结合的要素中的“一个或两个”,即,要素在某些情况下结合地存在而在其他情况下分离地存在。以“和/或”列出的多个要素应该以相同的方式解释,即,如此结合的要素中的“一个或多个”。可以可选地存在由“和/或”条款具体标识的要素之外的其他要素,无论那些具体识别的要素有关还是无关。因此,作为非限制性示例,对“A和/或B”的引用当与诸如“包括”的开放式语言结合使用时,在一个实施方案中可以指仅A(可选地包括除B之外的要素);在另一个实施方案中,可以指仅B(可选地包括除A之外的要素);在又一个实施方案中,可以指A和B两者(可选地包括其他要素);等等。
如本文在说明书和权利要求中所使用,“或”应被理解为具有与以上所定义的“和/或”相同的含义。例如,当分开列表中的项目时,“或”或者“和/或”应被解释为是包括性的,即,包括至少一个,但也包括多于一个的多个要素或所列要素,以及可选地包括其他未列出的项目。仅明确指出相反的术语,诸如“仅一个......”或“恰好一个......”,或者当在权利要求中使用时,“由......组成”将指的是包括多个要素或所列要素中的仅一个要素。一般地,如本文所用的术语“或”当前置有排他性术语诸如“任一”、“之一”、“仅其中之一”或“恰好其中之一”时,仅应被解释为指示排他性选择(即,“一个或另一个但非两者”)。当在权利要求中使用时,“基本上由......组成”应具有在专利法领域中所使用的普通含义。
如本文在说明书和权利要求中所使用,在提及一个或多个要素的列表时,短语“至少一个”应被理解为是指从所列要素中的任何一个或多个要素中选择的至少一个要素,但不一定包括所列要素中具体列出的各个和每个要素中的至少一个,并且不排除所列要素中要素的任何组合。该定义还允许除了短语“至少一个”所指的要素列表中具体识别的要素之外可以可选地存在其他要素,无论那些具体识别的要素有关还是无关。因此,作为非限制性示例,“A和B中的至少一个”(或等效地,“A或B中的至少一个”,或等效地“A和/或B中的至少一个”)在一个实施方案中可以指至少一个,可选地包括多于一个A,而不存在B(并且可选地包括除B之外的要素);在另一个实施方案中,可以指至少一个,可选地包括多于一个B,而不存在A(并且可选地包括除A之外的要素);在又一个实施方案中,可以指至少一个,可选地包括多于一个A,以及至少一个,可选地包括多于一个B(并且可选地包括其他要素);等等。
在权利要求以及以上说明书中,所有过渡性短语,诸如“包括”、“包含”、“携带”、“具有”、“含有”、“涉及”、“持有”、“由......组成”等应理解为开放式的,即意指包括但不限于。如美国专利局专利审查程序手册第2111.03节所述,仅过渡性短语“由……组成”和“基本上由……组成”应分别是封闭的或半封闭的过渡性短语。
- 多输入多输出致动器和使用其的组件
- 阀致动器组件和使用该阀致动器组件的燃料喷射器