用于成像器械、装置和方法的清洁装置
文献发布时间:2023-06-19 11:57:35
相关申请的交叉引用
本申请要求标题为“CLEANING DEVICES FOR IMAGING INSTRUMENTS,DEVICES,ANDMETHODS”的美国临时专利申请号62/747,926(2018年10月19日提交)的优先权和权益,其整个内容以引用方式被并入本文。
技术领域
本公开的方面涉及用于成像器械的清洁装置。例如,本公开的方面涉及在远程外科手术、诊断、治疗和其他处置程序中使用的成像器械,包括但不限于内窥镜和具有远端摄像机或其他成像、感测或其他工具和装置的器械。
背景技术
成像器械(诸如内窥镜)能够被用来在远离对象部位的位置处提供对象部位的观察。不能直接可观察的远程视场的图像能够被传输到远程视场外部的显示装置(例如,电子显示器),并且因此可被用户观察。成像器械的这种使用的一个示例是在能够通过手动腹腔镜工具或经由远程操作系统执行的微创手术、诊断、治疗、感测和/或其他处置程序(在本文中被共同称为“外科手术程序”)期间。在这样的程序期间,观察远程部位的成像器械的透镜、视口或其他观察部分可能被组织、流体或其他材料部分地或完全地遮挡。因此,远程部位的用户观察可能被部分地或完全地遮挡,并且器械可能需要被移除、清洁并重新插入以继续操作。移除、清洁并重新插入成像器械的过程会是耗时的,这在外科手术程序中是不期望的。
存在对于便于在程序期间在远程部位处清洁成像器械的观察部分而无需从进入远程部位的位置处移除成像器械的装置以及相关的系统和方法的需要。换言之,存在对于当成像器械在用于对远程部位进行成像的位置处时原位清洁成像器械的观察部分的需要。
发明内容
本公开的示例性实施例可解决上述问题中的一个或更多个和/或可展示上述期望特征中的一个或更多个。根据以下描述,其他特征和/或优点可变得显而易见。
根据本公开的至少一个实施例,一种用于清洁器械的装置包括歧管和管状构件,所述歧管包含一个或更多个流体进口,所述管状构件可相对于所述歧管旋转,并且从所述歧管远侧地延伸。所述管状构件包括近端、远端和在所述远端处的流体出口。所述流体出口被配置为大体上跨所述管状构件的所述远端引导流体流。所述管状构件还包括一个或更多个流体通道,所述一个或更多个流体通道被流体地耦接到所述流体出口,并且所述一个或更多个流体通道从所述流体出口延伸到所述歧管。所述歧管和管状构件被配置为将成像器械的轴接收在使得所述成像器械的所述轴延伸通过所述歧管到达所述管状构件的所述远端的位置中。系统和方法涉及器械和清洁装置。
根据本公开的至少另一实施例,一种系统包括成像器械和清洁装置。所述成像器械包括轴和观察部分,所述轴具有近端和远端,所述观察部分在所述轴的所述远端部分处。所述清洁装置包括歧管和管状构件,所述歧管包含一个或更多个流体进口,所述管状构件可相对于所述歧管旋转,并且从所述歧管远侧地延伸。所述管状构件包括近端、远端和在所述远端处的流体出口。所述流体出口被配置为大体上跨所述管状构件的所述远端引导流体流。所述管状构件包括一个或更多个流体通道,所述一个或更多个流体通道被流体地耦接到所述流体出口,所述一个或更多个流体通道从所述流体出口延伸到所述歧管。所述歧管和管状构件被配置为将所述成像器械的所述轴接收在使得所述轴延伸通过所述歧管到达所述管状构件的所述远端的位置中。
根据本公开的至少又一实施例,一种系统包括成像器械和清洁装置。所述成像器械包括轴和观察部分,所述轴具有近端和远端,所述观察部分邻近所述轴的所述远端。所述清洁装置包含管状构件、一个或更多个流体进口和一个或更多个流体出口。所述管状构件具有远端和近端,并且所述一个或更多个流体进口与纵向地延伸通过所述管状构件的一个或更多个流体通道流体地耦接。所述一个或更多个流体出口邻近所述管状构件的所述远端,并且与所述一个或更多个流体通道流体地耦接。所述管状构件被配置为接收所述成像器械的所述轴。当所述成像器械的所述轴被接收在所述管状构件中时,所述管状构件不径向向内突出超过所述成像器械的所述观察部分的外周边。
根据又一实施例,一种控制成像器械的清洁的方法包括,在所述成像器械处于正通过所述成像器械的观察部分成像的远程部位的位置处的情况下,并且响应于清洁过程的开始,提供指示所述成像器械正处于清洁状态的反馈,以及使清洁流体跨所述成像装置的所述观察部分流动。
根据又一实施例,一种方法包括接收开始用于内窥镜成像装置的清洁操作的命令,并且在接收到开始所述清洁操作的所述命令的条件下,开始所述清洁操作,并且自动中断用户控制输入与控制外科手术器械的操纵器之间的控制关系。
另外的目的、特征和/或优点将部分地在下面的描述中阐述,并且部分地将从描述中显而易见,或可通过本公开和/或权利要求的实践来获悉。通过所附权利要求中特别指出的元件和组合,可实现和获得这些目的和优点中的至少一些。
应当理解,前面的一般性描述和下面的具体描述都只是示例性和说明性的,并不是对权利要求的限制;相反,权利要求应有权获得其全部范围,包括等同物。
附图说明
从以下详细描述中可以单独或与附图一起理解本公开。附图被包括以提供对本公开的进一步理解,并且附图包含在本说明书中并构成本说明书的一部分。附图图示了本教导的一个或更多个实施例,并与说明书一起用于解释某些原理和操作。在附图中,
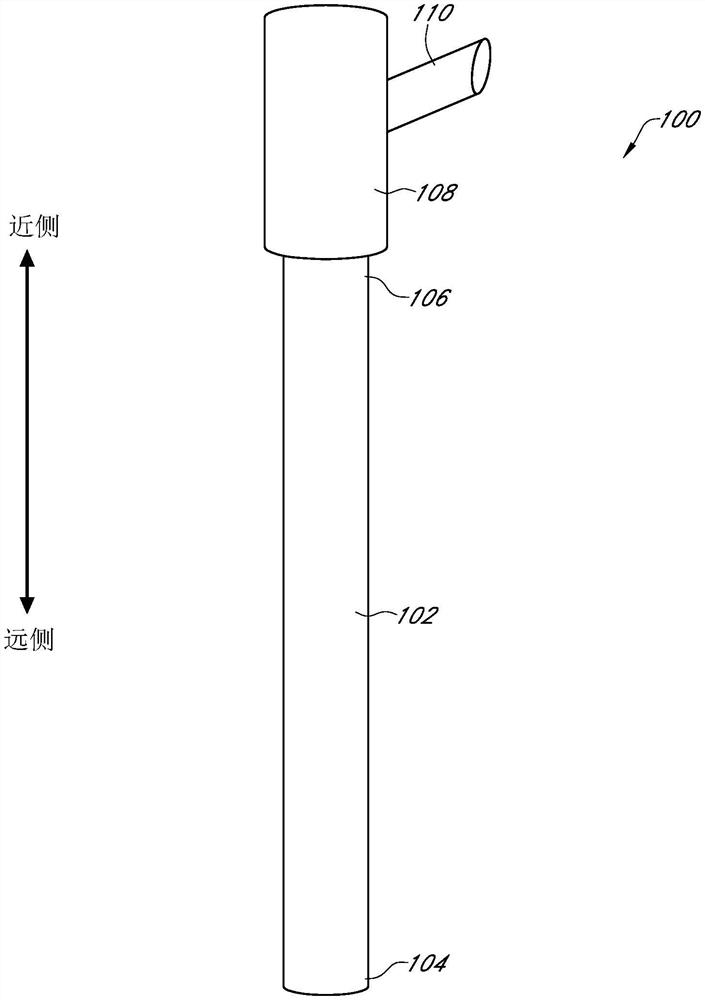
图1是根据本公开的用于成像器械的原位清洁的清洁装置的一个实施例的示意性侧视图。
图2是根据本公开的成像器械和清洁装置的一个实施例的透视图。
图3是根据图2的实施例的成像器械和清洁装置的在剖面3-3处示出的远侧部分的放大透视图。
图4是根据图2的实施例的成像装置和清洁装置的在剖面4-4处示出的近侧部分的放大剖视图。
图5是根据图2的实施例的清洁装置的局部隐藏的透视图。
图6是根据图2的实施例的清洁装置的远端部分的局部隐藏的透视图。
图7是根据本公开的另一实施例的清洁装置的管状构件的透视图。
图8是根据本公开的另一实施例的清洁装置的近侧部分的局部隐藏的透视图。
图9是根据图8的实施例的清洁装置的远侧部分的透视图。
图10是根据图8的实施例的清洁装置的远侧部分的详细剖视图。
图11是根据本公开的另一实施例的清洁装置的侧剖视图。
图12是根据本公开的一个实施例的操纵系统的透视图。
图13是根据本公开的另一实施例的操纵系统的实施例的局部示意图。
图14是根据本公开的另一实施例的工作流程。
图15是根据本公开的又一实施例的清洁装置的管状构件的剖视图。
具体实施方式
本公开设想了例如在远程外科手术程序或其他远程程序期间例如当器械在要成像远程部位的位置处时能够被用于原位清洁成像器械的清洁装置的各种实施例。例如,根据本公开的各种实施例,清洁装置被配置为实现成像器械(诸如内窥镜)的原位清洁(例如,除雾、除霜、移除生物材料、生物流体等)。本公开的各种实施例也能够促进远程部位的不受妨碍的观察,并且减轻(例如,减少或消除)对从远程部位移除成像器械以便清洁的需要。在一些实施例中,清洁装置包括近侧歧管部分,近侧歧管部分具有用于连接到一个或更多个流体源的一个或更多个流体进口。在一个实施例中,歧管包括两个流体进口。一个流体进口被配置为接收清洁流体(例如,盐水溶液或其他清洁溶液)的供应,并且另一个进口被配置为接收加压气体(例如,二氧化碳或适合于在外科手术期间使用的其他气体)的供应。在一些实施例中,清洁流体结合加压气体用来从成像器械的远侧观察部分(例如,透镜)清洁随着外科手术程序而来的组织或其他材料,并且气体被用来从成像器械冲刷清洁流体和/或干燥远侧透镜,由此部分地或完全地清洁内窥镜的远侧观察部分。
在本公开的各种实施例中,清洁装置包括管状构件,诸如鞘管,所以管状构件被耦接到歧管并可相对于歧管旋转,并且延伸到或稍微超过成像器械观察部分的远端。鞘管能够包括一个或更多个流体通道和一个或更多个喷嘴,一个或更多个流体通道流体地耦接歧管,一个或更多个喷嘴引导流体流(例如,清洁流体和/或气体)在成像器械的远侧观察部分上面。在一些实施例中,清洁装置被配置为使得鞘管不遮挡成像器械的观察部分的视场。在一些实施例中,成像器械提供不对称的视场,并且具有轴向滚动自由度(即,可沿着其纵向轴线旋转)以在观察不同区域或正被成像的远程部位的观察角度方面提供灵活性。在此类实施例中,鞘管具有不管成像器械轴的滚动取向如何都避免成像器械的视场的遮挡的构造。在一些实施例中,清洁装置包含光学透明材料,使得如果清洁装置的一部分被定位在视场中,光仍然穿过清洁装置的材料,由此避免遮挡视场。
在一些实施例中,歧管被耦接到鞘管,并且可相对于鞘管旋转。一个或更多个密封构件能够可选地被包括在歧管与鞘管之间,以防止液体和/或气体在鞘管与歧管之间逸出,同时允许鞘管与成像器械一起相对于歧管的滚动旋转。维持歧管处于静止位置实现软管或其他管道到清洁装置的连接以便供应清洁流体(例如,盐水溶液和二氧化碳气体),而不在清洁装置鞘管随着成像器械被旋转时扭转或缠结软管以防止鞘管遮挡视场。
在一些实施例中,清洁装置包括具有远侧部分的鞘管,远侧部分限定朝向成像器械远侧观察部分引导清洁流体流而不遮挡视场的流体路径。在一个实施例中,鞘管包含远侧开口,通过远侧开口暴露成像器械的远端。鞘管的远侧开口具有等于或大于成像器械的远侧观察部分的直径的直径。例如,鞘管能够被定尺寸为使得它不径向向内突出超过观察部分的外周边。
不管成像器械的滚动取向如何,本公开的清洁装置的实施例都促进通过成像器械的可靠的且不受妨碍的观察,同时允许成像器械的观察部分的原位清洁。
现在参考图1,示出了根据本公开的实施例的清洁装置的示意图。在图1的实施例中,清洁装置100包括鞘管部分,鞘管部分是具有远端104和近端106的管状构件102。鞘管部分被定尺寸为配合在成像器械(诸如图2中示出的成像器械212)的轴周围。管状构件102的近端106被耦接到歧管部分108并且可相对于歧管部分108旋转,歧管部分108接收成像器械的轴的近端部分。歧管部分108包含一个或更多个流体进口110,一个或更多个流体进口110被配置为与一个或更多个清洁流体(例如,液体或气体)源(未示出)流体地耦接。一个或更多个流体出口(图1中未示出)通过一个或更多个流体通道(也未示出)被流体地耦接到流体进口110。在一些实施例中,当成像器械的轴被接收在管状构件102内时,流体通道至少部分地由成像器械的轴限定,诸如被限定在轴与管状构件102之间。流体通道能够可选地与管状构件102集成在一起,诸如被部分地或完全地形成在管状构件102的壁内。一个或更多个流体出口被定位为使得,当成像器械轴在管状构件102内时,一个或更多个流体出口被定位在成像器械的远侧观察部分附近。流入一个或更多个流体进口110的流体被引导通过一个或更多个流体通道并且从一个或更多个流体出口被引导以从成像器械的观察部分清除材料。
现在参考图2,示出了被安装在成像器械212上的清洁装置200的实施例。清洁装置200包括成像器械212的如参考图1描述的那样覆盖成像器械轴218的管状构件214。清洁装置的歧管216被定位在成像器械轴218的近端部分周围,并且被可选地配置为允许配合成像器械212与器械托架219的接合,器械托架219被配置为被可操作地耦接到成像器械212以将诸如滚动和/或其他自由度的运动赋予成像器械212的轴218。器械托架219能够可选地被耦接到远程操作操纵器(诸如下面描述的图12和图13中的操纵器臂1100、1110、1120、1130、2140),远程操作操纵器相对于患者的身体定位成像器械212,并且可选地定位一个或更多个其他外科手术器械(诸如图12和图13中的器械1300、2300、2310)。成像器械212的连接器部分220被配置为通过无菌器械适配器223与器械托架219耦接,并且连接器部分220能够可选地包括用于连接到外科手术系统(未示出)的其他部分(诸如操纵器控制或其他输入装置、显示装置、电源或其他部件)的各种控制和连接部件(诸如线束222)。成像器械轴218包括远端部分224,远侧观察部分(诸如透镜、窗口或其他成像孔径)位于远端部分224处。
图2中示出的系统进一步描绘了环绕器械托架219的无菌适配器。在图2的系统中,无菌适配器包含与适配器部分223耦接的靴状部分221,适配器部分223能够可选地包括中间驱动装置(诸如可旋转驱动盘),以跨由无菌适配器形成的无菌屏障将来自远程操作操纵器的驱动力传递到器械托架219。无菌适配器能够进一步包括无菌布帘(未示出),无菌布帘被附接到靴状部分221,并且被用来维持对象部位的无菌性。
清洁装置200从成像器械212的连接器部分220延伸到轴218的远端部分224。当成像器械212被耦接到器械托架219时,歧管216被定位在器械托架219附近,并且管状构件214从歧管216延伸到内窥镜轴218的远端部分224。歧管216包括一个或更多个流体进口端口226、228(在图2中示出了两个),一个或更多个流体进口端口226、228均被配置为接受如上面讨论的清洁流体流,诸如盐水溶液和二氧化碳中的一个或更多个。一个或更多个进口端口226、228能够可选地被配置为附接到外科手术系统(诸如图12中示出的操纵系统1000)的软管或其他流体供应管或这种系统的支撑部件。在一个实施例中,一个或更多个进口端口226、228被配置有鲁尔类型的附件(Luer-type fittings)(未示出);然而,各种其他类型的流体连接器或直接附接也可以被使用。
清洁装置200被配置为将在一个或更多个进口端口226、228处引入的流体引导到轴218的远端部分224。在各种实施例中,歧管216和管状构件214包含在一个或更多个进口端口226、228至位于邻近内窥镜轴218的远端部分224的管状构件214的远端处的喷嘴(例如,图3中的喷嘴部分332)之间延伸的一个或更多个流体通道。在使用中,流体从一个或更多个进口端口226、228行进,通过歧管部分216和管状构件214中的一个或更多个通道,并且离开喷嘴。邻近(例如,跨)器械的远侧观察部分引导来自喷嘴的流体流,因此从远侧观察部分冲走体液、组织或其他碎片并且从成像器械的远侧观察部分移除碎片。
现在参考图3,示出了具有图2的清洁装置200的成像器械212的远端部分224的放大透视图。成像器械212的观察部分330的周边被清洁装置200的管状构件214环绕。管状构件214包括从管状构件214远侧地延伸的喷嘴部分332。喷嘴部分332包括被配置为跨成像器械的观察部分330引导流体流(例如,流入一个或更多个进口端口226、228并沿着管状构件214的流体通道流动的流体)的出口。例如,在图3的实施例中,喷嘴部分332包括在观察部分330上面引导流体流的开槽出口334。如图3中示出的,喷嘴部分332从管状构件214远侧地延伸,使得它被远侧地定位超过成像器械212的观察部分330。在一些实施例中,喷嘴部分332的位置和形状是基于由观察部分330呈现给显示器或操作者的视场的尺寸和形状,并且喷嘴部分332被定位并配置为防止遮挡观察部分330的视场的任何部分。
在内窥镜轴218被配置为滚动的一些实施例中,如果成像器械具有不对称的视场并且成像器械相对于管状构件214的喷嘴部分332被旋转,喷嘴部分332可能遮挡视场的至少一部分。在一些实施例中,清洁装置200(图2)可选地包括在歧管部分216与管状构件214之间的可旋转耦接件,以防止喷嘴部分332遮挡视场。以这种方式,清洁装置的管状构件能够随着器械轴旋转,而歧管保持静止。
例如,现在参考图4,示出了清洁装置200的歧管216和管状构件214的近侧部分的剖视图。成像器械轴218(在图2和图3中以透视方式示出)延伸通过歧管216和管状构件214。歧管216通过可旋转耦接件436与管状构件214的近端耦接。在图4的实施例中,管状构件214包括内套管448、外套管450和在内套管448与外套管450之间的间隔器构件452。内套管448延伸通过歧管216到达歧管216的近端处的近侧领部449。内套管448被焊接、型锻或要不然附加到近侧领部449。管状构件214的外套管450至少部分地延伸到歧管216中的环形凹槽(relief)446内以维持管状构件214与歧管216之间的同心性。远侧领部442被附加(诸如通过焊接、过盈配合或与外套管450一体形成)在外套管450周围,并且歧管216在远侧领部442与近侧领部449之间俘获在内套管448上。
可旋转耦接件436可选地包括确保清洁流体不在管状构件214与歧管216之间从清洁装置泄露的一个或更多个密封构件。例如,在图4的实施例中,歧管216与管状构件214之间的密封构件438和439防止清洁流体泄露通过可旋转耦接件436,同时允许管状构件214与歧管216之间的旋转移动。
在图4的实施例中,密封构件438和439是O形环。在其他实施例中,密封构件438和439能够是或包括其他环形密封构件,例如,垫圈或其他合适的密封结构。密封构件438和439能够包含诸如但不限于天然或合成橡胶、硅树脂或其他聚合物材料的材料。密封构件438和439被定位在歧管部分216与管状构件214之间的相应密封表面之间。在图4的实施例中,密封构件438位于远侧领部442与歧管216之间,并且密封构件439位于近侧领部449与歧管216之间,以密封管状构件214和歧管216并且防止清洁流体在清洁装置的部件之间的泄露。
在图4的实施例中,内窥镜轴(例如,图2中的轴218)被插入通过内套管448以将内窥镜与清洁装置组装在一起。在其他实施例中,清洁装置能够可选地被配置为没有内套管,并且内窥镜装置的轴218被直接插入通过歧管216和间隔器构件452。在此类实施例中,内窥镜轴218的外表面以与内套管448的外表面大体上相同的方式起作用。
在各种实施例中,歧管216和管状构件214包括被配置为促进清洁流体从歧管216并沿着管状构件214流动到喷嘴部分332(图3)的特征。此类特征可以例如被配置为当流体从歧管216流动到管状构件214时减少(例如,最小化)湍流流动。另外,此类特征可以被配置为不管管状构件214相对于歧管216的旋转滚动取向如何都确保歧管216与管状构件214之间的流动条件保持相似(例如,相同)。例如,仍然参考图4,歧管216能够包括具有被定尺寸为产生围绕内套管448的环形凹槽446的内径的部分。环形凹槽446与一个或更多个进口端口226、228流体连通。流入进口端口226、228的流体进入并填充环绕成像器械轴218的环形凹槽446。
管状构件214包括促进流体从歧管216流动到喷嘴部分332(图3)的各种特征。现在参考图5,示出了根据图2-图4的实施例的成像器械轴和清洁装置的部分隐藏透视图以更好地图示管状构件214的构造。管状构件214包括内套管448、外套管450和在内套管448与外套管450之间的间隔器构件452,如结合图4讨论的。间隔器构件452仅部分地围绕内套管的周向延伸,留下被限定在内套管448与外套管450之间的纵向取向的流体通道554。换言之,间隔器构件452具有与内套管448和外套管450一起形成沿着在内套管448与外套管450之间的沿着管状构件214的长度的流体通道554的纵向开口。在不包括内套管448的实施例中,流体通道554至少部分地由成像器械的轴218(图2)、间隔器构件452和外套管450限定。间隔器构件452的近端556以将流体从环形凹槽446(图4)引导到流体通道554的倾斜轮廓558为特征。倾斜轮廓558能够帮助减少流体流中的湍流,并且促进流体流从环形凹槽446过渡到流体通道554内。另外,在一些此类实施例中,进口端口226、228中的一个或更多个被定位为相对于清洁装置的纵向轴线偏移以诱导通过环形凹槽446的旋转流动。在具有笔直流体通道(诸如通道554)或具有延伸到管状构件214的远端的环形通道的实施例中,偏移进口部分226、228能够被可选地包括,并且能够减少歧管和管状构件中的湍流流动。
现在参考图6,示出了清洁装置200(图2)的远端部分的部分隐藏视图。远端部分包括喷嘴部分332。如图6中示出的,被限定在内套管448与外套管450之间的流体通道554在喷嘴部分332处终止,其中出口334被取向为引导从自流体通道554跨成像器械的远侧观察部分330(图3)的面的流动。在一些实施例中,喷嘴部分332能够可选地包括使流体的流动平稳并且促进将清洁流体流的方向从沿着流体通道554的流动改变为跨内窥镜观察部分的面的流动的轮廓。在各种其他实施例中,喷嘴部分332能够可选地包括与间隔器构件452的倾斜轮廓558类似的倾斜轮廓,并且流体通道能够可选地具有沿着清洁装置的长度的环形形状。
在使用中,当成像器械轴218(图2)例如由于器械托架219(图2)的激活而被滚动时,管状构件214随着轴218旋转,而歧管216相对于器械托架219保持静止。通过可旋转耦接件436而被允许的歧管与管状构件之间的相对旋转因此允许管状构件在轴被旋转时维持与器械的固定旋转取向关系,由此防止成像器械的视场被喷嘴部分遮挡。
各种实施例进一步提供可以存在于成像器械轴处的电位和患者身体的电位(例如,身体接地电位)的均衡。在一些实施例中,清洁装置的管状构件214能够提供成像器械轴218与管状构件214的外表面之间的导电路径。在一些实施例中,内套管448和外套管450包含导电材料,例如,不锈钢。喷嘴部分332也能够包含被布置为与内套管448和外套管450导电接触的导电材料。导电材料由此形成从与内套管448接触的器械轴218到通过例如被插入通过患者身体中的切口的导电套管与外套管450接触的患者身体的导电路径。在其他实施例中,喷嘴部分332包含光学透明聚合物,并且清洁装置的其他部件产生成像器械轴与管状构件214的外表面之间的导电路径。
例如,能够提供导电元件来将内套管448导电地耦接到外套管450。现在参考图15,示出了根据本公开的另一个实施例的清洁装置的管状构件1598的剖视图。导电销1599与内套管448和外套管450导电接触。导电销1599能够被提供在内套管448与外套管450之间的任何位置处以提供内套管448与外套管450之间的导电接触。在其他实施例中,导电销1599可以由围绕管状构件214周向地延伸的导电环或备选地多个导电销1599代替。导电销1599或其他导电部件能够包含诸如金属或金属合金(诸如不锈钢、钛或铝合金)、导电复合材料(诸如渗碳聚合物)或其他导电材料的材料。
清洁装置的其他部件能够包含为了便于制造和组装而选择的材料。参考图2-图6的实施例,间隔器构件452和歧管216由例如但不限于高密度聚乙烯(HDPE)或聚碳酸酯的聚合物制作。在其他实施例中,此类部件能够包含复合材料、塑料、金属或金属合金、或其他材料。
现在参考图7,以透视图方式示出了根据本公开的另一实施例的清洁装置管状构件760。在图7的实施例中,流体通道762被位于内套管748与外套管750之间的管道764包围。作为非限制性示例,在图7的实施例中,管道764包含金属或金属合金,诸如不锈钢(例如,包括镍和/或铬合金元素的铁合金)、钛合金或其他金属。内套管748和外套管750能够包含与管道764相同的材料或与管道764不同的材料。在一些实施例中,内套管748、外套管750和管道764被焊接到彼此。图7的实施例能够可选地包括与间隔器构件452类似的间隔器装置以将流体从在上面参考图4讨论的环形凹槽446引导到管道764内。然而,在图8的实施例中,不会需要这样的间隔器来延伸到管状构件760的远端,因为流体通道762被管道764限定。换言之,在这样的实施例中,间隔器仅用来将流体引导到管道764内,并不沿着管状构件760的长度延伸。
图8-图10示出了根据本公开的实施例的另一清洁装置。参考图8,以部分隐藏的线示出了清洁装置800的一部分以图示清洁装置800的内部部分。清洁装置800包括歧管866和管状构件868,大体上如在上面参考其他实施例描述的。歧管866和管状构件868彼此旋转地分离,并且清洁装置800能够可选地包括例如与图4的实施例中示出的密封构件438类似的密封构件(未示出)。歧管部分866包含被配置为接收成像器械轴(诸如轴218(图2))的中心膛870。环绕中心膛870并且纵向地延伸通过歧管866的横向壁872是具有周向宽度W
歧管866中的流体通道874的宽度W
歧管866和管状构件868中的流体通道的其他布置和数量(诸如具有比歧管流体通道874的宽度W
现在参考图9和图10,示出了图8中示出的成像器械清洁装置800的远端部分。通过管状构件868中的孔径980暴露成像器械的远侧观察部分930。参考图10,示出了图8和图9的清洁装置800的远端部分的剖视图。被限定在管状构件流体通道878之间的脊状物982包括径向向内延伸并且将器械轴218与管状构件868的环形唇部986间隔开从而在远侧观察部分930与管状构件868的环形唇部986之间留下间隙G的部分984。沿着管状构件流体通道878向下流动的流体离开通道878,并且通过环形唇部986跨远侧观察部分930被重定向。在图8-图10的实施例中,流体从基本上围绕管状构件868的整个内部周边的位置跨成像器械的远侧观察部分930径向向内流动,并且流体从其流动的具体流体通道878通过管状构件868与歧管866之间的旋转取向来确定。在图8-图10的实施例中,管状构件868不径向向内突出超过观察部分930的周边,由此防止观察部分930和其视场的遮挡。在其他实施例中,管状构件868能够可选地包含透明材料,诸如透明聚合物,以减轻观察部分930的遮挡,即使管状构件868至少部分地在观察部分930上面延伸。
在上面结合图2-图10描述的实施例中,清洁装置的管状构件和歧管被配置为基于例如由远程操作操纵器(诸如被操作性地耦接到图3中示出的器械托架219的远程操作操纵器)驱动的内窥镜轴的旋转而相对于彼此旋转。这样的布置能够使得成像装置的旋转能够提供远程部位的不同观察而视场不被清洁装置遮挡。
在其他实施例中,成像器械清洁装置被配置为通过配置清洁装置的远端部分使得不管成像器械相对于清洁装置的滚动取向如何都没有清洁装置的部分进入成像器械的视场而避免遮挡视场。在此类实施例中,清洁装置能够可选地包含鞘管部分和歧管部分,鞘管部分和歧管部分被固定地耦接到彼此,诸如被一体地形成为单个整体件或由被附加或要不然结合到彼此的两个或更多个部件形成。例如,此类实施例能够被用于流体流跨内窥镜顶端的方向和取向不必在参考内窥镜的固定旋转取向的布置中。
例如,现在参考图11,示出了用于成像器械的清洁装置的另一个实施例。在图11的实施例中,清洁装置1188包括管状构件1189和歧管1190,管状构件1189和歧管1190以不可旋转方式被耦接,诸如被一体地形成,或由多个部件形成并且诸如通过粘合剂、焊接或其他固定机构被固定在一起。管状构件1189的远端1191包括具有内径D
成像器械轴218延伸通过管状构件1189,并且通过孔径1192暴露成像器械的远侧观察部分1193。轴218具有外径D
如图11中示出的,管状构件1189包括流体通道1194,流体通过流体通道1194从歧管部分1190流到喷嘴1195。由孔径1192限定并且在管状构件1189的远端处径向向内延伸的环形唇部1198跨远侧观察部分1193径向向内重定向流体流,以从远侧观察部分1193冲走碎片或其他物质。
在图11的实施例中,管状构件1189的内套管1196包括在管状构件1189的远端附近径向向外张开的张开部分1197。张开部分1197在轴218的远端附近远离成像器械轴218张开,以促进从轴218的外径径向向外定位喷嘴1195。喷嘴1195能够可选地围绕轴218的整个周边以环的方式延伸,或备选地,能够包含位于任何期望位置处的任何数量的分立的流体流动路径,以便根据需要围绕轴218的周边被定位,以促进用于清洁观察部分1193的流体的流动。在其他实施例中,管状构件1189不包括张开部分1197,并且流体通道1194被进一步径向向外定位,或具有沿着管状构件1189的长度向外的渐变锥度,以促进孔径1192的内径D
在一些实施例中,成像器械可以被可操作地耦接到被配置为从成像器械接收数据的显示装置。例如,显示装置可以是外科手术系统的一部分,并且显示由成像器械捕获的例如患者身体中的远程部位或感兴趣目标的图像。成像器械也可以被可操作地耦接到流体控制系统以控制被引入到清洁装置的流体的流动,诸如盐水溶液和二氧化碳或其他流体中的一个或两个的流动。控制系统可以被进一步配置(例如,编程)为基于清洁装置的状态控制显示。例如,因为被用来清洁观察部分的流体可能干扰或遮挡感兴趣远程部位的观察,控制系统能够可选地被配置为向观察者指示成像器械正在经历清洁过程。这样的指示可以是视觉的、听觉的、触觉的和/或其他合适的反馈。另外或备选地,控制系统能够可选地被配置为基于正在使用中的清洁装置修改所显示的图像。例如,在一个实施例中,显示从彩色改变为灰度或其他单色或备选色标以指示成像器械正在经历清洁过程。在另一个实施例中,显示呈现空白屏幕或显示指示清洁程序正在发生的消息。
在一些实施例中,控制系统可选地被配置为在清洁期间以指定方式移动成像器械以促进清洁过程。例如,控制系统可以被配置为在清洁过程期间自动滚动成像器械。这样的过程能够可选地包括当向成像器械供应清洁流体流时从初始位置将成像器械滚动预定量,并且然后当清洁流体正在流动时或在停止清洁流体流之后将成像器械旋转回到初始位置。在一些情况下,成像器械的旋转使得清洁流体能够更彻底地清洁观察部分,通过确保观察部分的所有部分都被暴露于清洁流体流。
另外或备选地,控制系统能够被配置为控制清洁流体流被输入到一个或更多个流体进口(例如,图2中的进口端口226、228)内的顺序。在一些实施例中,控制系统被配置为使盐水溶液(或另一液体)在远侧观察部分上面流动以从远侧观察部分冲走组织、体液或其他物质。在通过液体移除物质之后,控制系统然后使气体(诸如氮气或二氧化碳)跨远侧观察部分流动以清除液体从而恢复从观察部分的清楚观察。
控制系统能够可选地被进一步配置为防止操作者在清洁过程期间操纵器械和其他外科手术器械。在一些实施例中,控制系统被编程为中断一个或更多个用户控制的输入装置控制对应的远程操作操纵器和相关联的外科手术器械(诸如图12中的外科手术器械1300、2300、2310)的能力。由于清洁过程可能干扰操作者通过成像器械观察感兴趣远程部位,这种控制中断防止操作者在远程部位的受妨碍的观察的情况下操作外科手术器械。在一些实施例中,当清洁完成时,控制系统自动重新建立控制关系。在其他实施例中,控制系统自动重新建立关于一个或更多个条件的控制关系,诸如当控制关系被中断时,控制输入装置还未移动超过预定的平移或取向。在其他实施例中,直到输入装置操作者命令控制系统这样做,控制系统才自动重新建立输入装置与其相关联的远程操作操纵器之间的控制关系。
现在参考图14,示出了用于成像器械的原位清洁的工作流程1400的实施例。在1402处,在成像器械处于正通过成像器械的观察部分成像的远程部位的位置处的情况下,并且响应于清洁过程的开始,工作流程1400包括提供指示成像器械正处于清洁状态的反馈。反馈能够包括例如将通过被可操作地耦接到成像装置的显示装置显示的图像从初始状态例如改变为指示清洁状态的指示状态。初始状态能够包括例如由成像装置捕获的图像的全色显示。指示状态能够包括清洁过程正被执行的指示。这样的指示能够包括例如,将显示的色标改变为例如灰度、显示关于显示的指示物、注意或消息、显示的空白部分或全部或其他指示中的一个或两个。在1404处,使清洁流体跨成像装置的观察部分流动。工作流程1400能够进一步包括将显示装置从指示状态返回到初始状态。显示装置能够包括例如在下面结合图12和图13讨论的显示装置1500、2500。本领域技术人员将会理解指示不一定是显示处的视觉指示,而且能够包括或备选地是听觉、触觉和/或其他类型的反馈。
本公开的实施例提供了当成像器械观察部分被定位为捕获感兴趣远程部位的图像时实现成像装置观察部分的原位清洁而无需移除成像装置以进入观察部分的清洁装置。此类装置被配置为防止遮挡成像器械的视场,由此提供感兴趣远程部位的一致的且可靠的可视化。
包含本文中描述的发明方面的实施例可以例如与远程操作的计算机辅助系统(例如,远程操作外科手术系统)一起使用,诸如例如在Schena等人的标题为“Multi-PortSurgical Robotic System Architecture”的美国专利号9,358,074(2013年5月31日提交)、Schena等人的标题为“Redundant Axis and Degree of Freedom for Hardware-Constrained Remote Center Robotic Manipulator”的美国专利号9,295,524(2013年5月31日提交)和Gomez等人的标题为“Surgical System Instrument Mounting”的美国专利号8,852,208(2010年8月12日提交)中描述的那些,上述专利中的每一个以引用方式被完全并入本文。另外,包含本文中描述的一个或更多个方面的实施例可以例如与da
如上面讨论的,根据包含一个或更多个方面的各种实施例,本公开的装置被配置用于在远程操作的计算机辅助外科手术系统(有时被称为机器人外科手术系统)中使用。现在参考图12,示出了远程操作的计算机辅助外科手术系统的操纵系统1000的实施例,外科手术器械被配置为被安装到操纵系统1000以便使用。这样的外科手术系统可以进一步包括用于接收来自用户的输入以控制操纵系统1000的器械的外科医生控制台(未示出)以及辅助系统(诸如控制/视觉推车(未示出)),如例如在上面包含的美国专利号9,358,074和9,295,524中描述的。如本领域技术人员将会意识到的,外科医生控制台和辅助系统中的任一个或两个能够包括用于显示从成像器械获得的图像的显示器。
如图12的实施例中示出的,操纵系统1000包括基部1020、主柱1040和被连接到主柱1040的主梁1060。操纵系统1000还包括均被连接到主梁1060的多个臂1100、1110、1120、1130。臂1100、1110、1120、1130均包括器械安装部分1200,器械1300可以被安装到器械安装部分1200,器械安装部分1200被图示为被附接到臂1100。臂1100、1110、1120、1130的部分可以在外科手术程序期间根据由用户在外科医生控制台处提供的命令被操纵。在一实施例中,从用户控制系统传输的(一个或多个)信号或(一个或多个)输入被传输到辅助系统,辅助系统可以解读(一个或多个)输入并生成要被传输到操纵系统1000的(一个或多个)命令或(一个或多个)输出以引起器械1300(仅一个这样的器械被安装在图12中)和/或器械1300在操纵系统1000处被耦接到的臂1100的部分的操纵。
根据一个实施例,器械安装部分1200包含驱动组件1220和套管安装件1240,其中器械1300的器械托架1340与驱动组件1220连接。套管安装件1240被配置为保持套管1360,器械1300的轴1320可以在外科手术程序期间通过套管1360延伸到外科手术部位。驱动组件1220包含被控制为响应于外科医生控制台处的输入命令并且将力传输到器械托架1340以致动器械1300的各种驱动和其他机构,如本领域技术人员熟悉的。
尽管图12的实施例示出了仅被附接到臂1100的器械1300以便于观察,但是器械可以被附接到臂1100、1110、1120、1130中的任一个和每一个。器械1300可以是如本文中讨论的具有末端执行器的外科手术器械。具有末端执行器的外科手术器械可以被附接到臂1100、1110、1120、1130中的任一个并与臂1100、1110、1120、1130中的任一个一起使用。本文中描述的实施例不限于图12的实施例,并且各种其他远程操作的计算机辅助外科手术系统构造可以与本文中描述的实施例一起使用。
也设想了外科手术系统的其他构造,诸如被配置用于单端口外科手术的外科手术系统。例如,现在参考图13,示出了具有处于安装位置的两个外科手术器械2300、2310的操纵系统的操纵器臂2140的实施例的一部分。为了简单起见,图13的示意性图示仅描绘了两个外科手术器械,但是多于两个外科手术器械可以以安装位置被接收在操纵系统处,如本领域技术人员熟悉的。每个外科手术器械2300、2310包括在远端处具有可移动末端执行器或(如果器械是成像器械)内窥镜、摄像机或其他感测装置的器械轴2320、2330,并且可以或可以不包括腕部机构(未示出)以控制远端的移动。
在图13的实施例中,器械2300、2310的远端部分通过单个端口结构2380被接收以被引入到患者内。能够配合本公开使用的操纵系统的其他构造能够使用若干个体操纵器臂。另外,个体操纵器臂可以包括单个器械或多个器械。另外,器械可以是具有末端执行器的外科手术器械,或可以是在外科手术程序期间被用来提供远程部位的信息(例如,可视化、电生理活动、压力、流体流和/或其他感测数据)的感测器械。因此,器械中的一个或更多个可以是根据本公开的各种实施例的成像器械。
图12和图13的系统还可以包括被总体标记为1500、2500的可操作地耦接的显示装置。显示装置1500、2500能够包括为用户控制接口(未示出)和/或辅助推车(未示出)的一部分和/或作为独立部件的一个或更多个显示器。显示装置1500、2500可以被可操作地耦接为从被可操作地耦接到操纵器臂1100、1110、1120、1130、2420、2430中的一个的成像器械接收图像数据以显示远程部位的图像,例如,实时图像,如本领域技术人员熟悉的。显示装置1500、2500也可以被可操作地耦接到远程操作系统的控制系统,并且被配置为显示能够基于系统使用参数被控制的各种图形用户接口图像并向用户提供关于系统状态的附加信息。
图示各种实施例的该描述和附图不应被视为限制。在不脱离本说明书和所要求保护的发明(包括等同物)的范围的情况下,可进行各种机械、组成、结构、电气和操作变化。在一些情况下,未详细示出或描述公知的结构和技术,以避免模糊本公开。两个或更多个图中的相同数字表示相同或相似的元件。此外,参考一个实施例详细描述的元件和它们的相关特征可在任何切实可行的情况下被包括在未具体示出或描述它们的其他实施例中。例如,如果参考一个实施例对元件进行详细描述,并且没有参考第二实施例描述该元件,但该元件也可被要求为被包括在第二实施例中。
为了本说明书和所附权利要求的目的,除非另有说明,否则表示数量、百分比或比例的所有数字,以及在说明书和权利要求中使用的其他数值应理解为在所有情况下均由术语“约”修饰,只要它们尚未如此修改。因此,除非进行相反的指示,否则在说明书和所附权利要求中列出的数值参数是近似值,其可根据试图获得的所需性质而变化。至少,每个数值参数至少应该根据报告的有效数字的数量并通过应用普通的舍入技术来解释,而不是试图将等同原则的应用限制在权利要求的范围内。
应当注意,如本说明书和所附权利要求中所使用的,单数形式“一”、“一个”和“该”,以及任何单词的任何单数用法包括复数指代,除非清楚且明确地限制一个指代。如本文所使用的,术语“包括”及其语法变型旨在是非限制性的,使得列表中的项目的叙述不排除可以替换或添加到所列项目的其他类似项目。
此外,该描述的术语不旨在限制本发明。例如,空间相对的术语,诸如“之下”、“下面”、“下部”、“上方”、“上部”、“近侧”、“远侧”等,可用于描述一个元件或特征与图中所示的另一个元件或特征的关系。这些空间相对术语旨在涵盖除了图中所示的位置和取向之外的使用或操作中的装置的不同方位(positions)(即,位置(locations))和取向(即,旋转放置)。例如,如果图中的装置被翻转,则描述为在其他元件或特征“下面”或“之下”的元件将在其他元件或特征“上方”或“上面”。因此,示例性术语“下面”可以涵盖上方和下面的位置和取向二者。装置可以以其他方式取向(旋转90度或以其他取向),并且相应地解释本文使用的空间相对描述符。
鉴于本文的公开内容,进一步的修改和替代实施例对于本领域普通技术人员而言将是显而易见的。例如,装置和方法可包括为了操作的清楚起见而从示意图和描述中省略的附加部件或步骤。因此,本说明书仅被解释为说明性的,并且是为了教导本领域技术人员实施本教导内容的一般方式。应当理解,本文所示和所述的各种实施例将被视为示例性的。元件和材料以及这些元件和材料的布置可替代本文所图示和所述的那些,零件和过程可颠倒,并且本教导的某些特征可独立使用,在受益于本文的描述之后,对于本领域技术人员而言,这一切都将是显而易见的。在不脱离本教导和以下权利要求的精神和范围的情况下,可对本文描述的元件进行改变。
应当理解,本文所阐述的具体示例和实施例是非限制性的,并且可在不脱离本教导的范围的情况下对结构、尺寸、材料和方法进行修改。
考虑到本文公开的本发明的说明书和实践,根据本公开的其他实施例对于本领域技术人员而言将是显而易见的。说明书和示例旨在仅被认为是示例性的,根据适用法律,所附权利要求被赋予其最大范围,包括等同物。
- 用于成像器械、装置和方法的清洁装置
- 以光学相干断层成像术增强的外科器械及用于修正外科器械所不希望的移动的系统和方法