扶手、椅子、用于调节扶手的方法
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及一种扶手、特别是用于办公椅的扶手。
背景技术
从现有技术已知具有多种可调性的扶手。通常,扶手具有转动、纵向和/或横向调节机构。具有特别多的单独调节可能性的扶手在此大多数为复杂构造,并且具有非常多的彼此配合作用的构造元件。
发明内容
本发明的任务在于,能以简单的机构实现椅子的扶手在更宽范围内的可调性。
该任务通过根据权利要求1的扶手或根据权利要求11的椅子或根据权利要求12的方法得以解决。本发明有利的实施方案在从属权利要求中给出。
根据本发明的扶手包括优选高度可调的扶手柱和支承在扶手柱上的、能纵向运动和横向运动以及能围绕转动轴线转动的扶手支架,其特征在于,扶手支架具有仅一个唯一的自由度。换言之,本发明的基本构思在于,提供一种具有仅一个唯一的自由度的扶手支架,然而该扶手支架既能纵向运动和横向运动也能围绕转动轴线转动。换言之,为了实现所有运动,该扶手支架需要仅一个唯一的自由度。以这种方式,提供一种结构上特别简单构造的并且然而能在更宽范围内调节的扶手。
关于简单的结构构造,特别有利的是,所述唯一的自由度是旋转自由度。优选地,为此使用扶手支架与扶手柱的已经存在的转动连接。在本发明一种优选的实施方式中,扶手支架的转动运动、纵向运动和横向运动仅由于扶手支架围绕如下转动轴线的可转动性而进行,扶手支架围绕该转动轴线能相对于扶手柱转动。换言之,扶手支架仅具有一个唯一的自由度、即旋转自由度,亦即用于实施围绕转动轴线的转动。
扶手支架的可转动运动性、可纵向运动性和可横向运动性或者说转动运动、纵向运动和横向运动在狭义上不可理解成扶手支架本身的可运动性或运动,而是可理解成扶手支架的支架面的设定的可用的面区域的可运动性或运动。换言之,这不仅取决于,扶手支架总体上以期望的方式运动。取而代之,扶手支架的支架面的此类设定的使用区域的运动是有意义的。只有当扶手支架的此类设定的支架使用面能运动到期望的位置中,扶手支架才能被椅子的使用者完全用作扶手支架。此类扶手支架使用面样品的突出之处在于限定的形状、尺寸和/或定向。此类最小使用面的形状和尺寸可以根据椅子或根据应用情况而变化。在一种优选的实施方式中,所述扶手支架的支架面的设定的可用的面区域是与椅子的中心纵向平面平行的矩形,该矩形的长度为至少150mm,并且宽度为至少50mm。
根据本发明一种优选的实施方式,扶手支架与扶手柱的连接处的转动轴线是扶手支架的唯一的转动轴线、优选地是扶手的唯一的转动轴线。因此,提供一种结构上特别简单的、持久少维修的且可靠的调节机构。
根据本发明一种优选的实施方式,所述转动轴线竖直延伸。在与扶手支架的支架体的水平或基本水平延伸的支架面的连接中,由此获得对于扶手支架的使用而言有利的扶手支架位置。
根据本发明一种优选的实施方式,扶手支架能转动360°。以这种方式,能实现最大可能的调节范围。
术语“前/后”或“上/下”或“竖直/水平”等在此总是指椅子的常规使用状态,在该使用状态中,椅子位于水平地面上。术语“纵向”和“横向”相应于椅子使用者的定向同样参照椅子,该椅子使用者通常沿椅子纵向方向定向地坐在椅子上,扶手可安装或被安装在椅子上,其中,纵向运动意味着沿椅子纵向方向的运动,并且横向运动意味着与椅子纵向方向成横向的运动。在此,出发点在于,椅子关于其中心纵向平面是镜面对称构造的。就这点而言,在本说明书中,总是从存在于椅子两侧上的扶手在扶手对的意义上出发。
可以将根据本发明的扶手支架安装在每个任意的扶手柱上。换言之,可以给每把椅子装备根据本发明的扶手。更换已经存在的扶手支架通常也是毫无问题地可行的,因为为了提供根据本发明所使用的转动轴线,可以动用已经存在于扶手柱上的转动支承件。
然而根据本发明的椅子、特别是办公椅具有至少两个、典型地两个所述扶手。已经配备有根据本发明的扶手的情况下,椅子的扶手可调节性得到改善。然而如果椅子具有两个根据本发明的扶手,那么完全充分利用了由扶手的特别构造产生的优点。
相应于本发明上面已描述的基本构思,根据本发明的用于调节扶手的方法的突出之处在于,使扶手支架通过围绕转动轴线的转动而相对于扶手柱沿纵向方向和沿横向方向运动,该扶手支架与优选高度可调的扶手柱连接并且具有一个唯一的自由度。换言之,与扶手柱连接的扶手支架仅由于其围绕转动轴线的旋转而进行转动运动、纵向运动和横向运动。
预期的结构简化主要由以下获得,即,不再需要多个彼此结构独立的运动机构来实现期望的运动形式(线性横向运动、线性纵向运动、转动运动)。取而代之,这些期望的运动可以仅通过扶手支架本身围绕唯一的转动轴线的转动而实现。
扶手支架的根据本发明的功能性优选地通过如下方式实现,即,转动轴线偏心于扶手支架的中心。因为在扶手支架围绕偏心设置的竖直转动轴线转动时,总是同时进行扶手支架的设定的支架使用面的纵向和横向运动,所以以这种方式能将扶手支架转到如下位置中,该位置导致距椅子的第二扶手的既有尽可能小的间距又有尽可能大的间距。同时,可以在更宽范围内调节椅子的扶手与座位前缘的间距。这同样地适用于扶手与椅子靠背前侧的间距。因此,具有偏心的转动轴线的实施方式因此更是特别有利于与扶手支架紧密构造形式相关联的特别可变的可调节性。
通过本发明能实现在特别大的范围内的特别通用的扶手可调节性以及扶手可定位性。例如,扶手支架的向内(即朝向椅子使用者身体方向)的大幅转动与扶手支架的向外(即远离椅子使用者身体)的大幅转动(例如以便能实现不受扶手支架阻碍的站起)一样容易实现。在扶手支架向外转动时,甚至能达到扶手支架彼此间如此大的间距,使得能无需进一步调节扶手载体,即无需沿横向方向借助为此设置的调节机构进行调节,由此促使椅子结构的再一次结构简化。
扶手支架可以实施为唯一的构件,或者也可以包括多个构件。例如,扶手支架可以具有由基体支承的支架体,并且支架体提供扶手支架的通常水平或基本上水平的支架面,其中,同时出发点在于,用作支承元件的基体总是小于位于其上的支架体,从而从上方观察,支架体完全覆盖基体。如果扶手支架实施为集成的构件,那么转动轴线偏心于扶手支架中心的布置意味着,扶手支架总体上是对称的或旋转对称的并且具有中心点或对称轴,并且转动轴线关于扶手支架的中心点或对称轴偏心设置,转动轴线未安装在扶手支架的中心中。如果扶手支架包括多个构件,那么转动轴线偏心于扶手支架中心的布置意味着,扶手支架的由基体支承的、对称的或旋转对称的支架体(“垫”)具有中心点或对称轴,并且转动轴线关于支架体的中心点或对称轴偏心设置,转动轴线未安装在支架体的中心中。在此,出发点在于,支架面和支架体的形状和尺寸相应。如果支架面的形状和尺寸与支架体的形状和尺寸不一致或至少不基本一致,那么偏心距也涉及扶手支架的支架体的对称或旋转对称的支架面。
如果偏心距的尺寸由偏心商给出,那么由扶手支架最大尺寸(D)和偏心距(e)形成的商q=D/e在4.0至6.4的范围内、优选地在4.2至5.9的范围内。在4.4至4.6范围内的商q被证明为更是特别适用于具有大的扶手调节范围的办公椅。
在一种特别优选的实施方案中,扶手支架的形状、更确切地说是支架体的形状、或者在形状彼此偏离时支架面的形状是圆形的。根据另外一种优选的实施方案,支架体或支架面使用非圆形的形状。在这种情况下,该形状优选地是没有角的。于是该形状优选地是椭圆形或蛋形的。根据另外一种实施方案,也可以使用旋转对称的有角的扶手支架。
如果支架体的圆度或非圆度的尺寸由相应的商给出,那么由扶手支架最大尺寸D和扶手支架最小尺寸d形成的商q'=D/d在1.00至1.30的范围内、优选地在1.00至1.20的范围内,特别优选在1.00至1.15的范围内。商q'在1.00至1.10的范围内被证明为更是特别适用于具有大的扶手调节范围的办公椅。当q'=1时,支架体将具有圆形形状,当值大于1时,非圆度尺寸将增加,并且支架体将具有或多或少椭圆形或蛋形的形状。
最大尺寸D和最小尺寸d在此都指支架体的支架面、即支架体上侧与使用者手臂接触的面。
以这种方式,能确保在扶手支架彼此之间或在扶手支架与其它椅子部件之间期望的最小和最大间距。尤其是由此能确保,当扶手支架彼此间距最大时,那么在扶手支架之间产生最小间距,其允许较胖的使用者坐下或站起。相反,较瘦的使用者可以将扶手支架之间的间距调节地较窄,以便使用扶手支架。以这种方式,能调节扶手彼此的间距,以便不仅在臀宽最大时而且在肘部间距最小时确保可靠的支撑。结果,能实现对于所有使用者而言与他们身体构造无关的手臂舒适支撑,而不必将手臂从使用者躯干移开太远。
同时确保,在将扶手支架朝向椅子靠背方向极端调节时,不会构成不希望的狭窄或夹紧部位。
为了使扶手的不希望的调节变困难或阻碍其,在本发明一种优选实施方案中,设有用于提高机械转动阻力的机构。优选地,设有闭锁阻挡件、特别是具有摩擦接合的推动闭锁阻挡件,该闭锁阻挡件由一方面在扶手支架上和另一方面在扶手载体上配合作用的闭锁元件构成、例如由一定数量的设置在扶手支架上的闭锁凸鼻构成,所述闭锁凸鼻在嵌入到设置在扶手载体上的闭锁凹部中的情况下构成闭锁阻挡件,其中,闭锁凸鼻用作闭锁阻挡件并且闭锁凹部用作闭锁凹槽,所述闭锁阻挡件和闭锁凹槽限定多个闭锁位置。对于由此产生的在两侧上力锁合的阻挡件而言,在闭锁位置上仅产生抵抗运动的提高的阻力,能通过相应增大的力来克服该阻力。在以均匀的力进行运动时,扶手支架因此在相关的位置中找到初始或闭锁位置。
尽管扶手支架可能的位置数量特别多,为了保证高的操作可靠性,在本发明一种优选的实施方案中,设有用于将扶手支架固定在期望的转动位置中的机构。这些固定机构实施成,使得在激活状态中不可能对扶手支架进行不希望的调节。
附图说明
接下来借助附图更详细地阐述本发明的实施例。在此示出:
图1示出第一扶手的侧视图,
图2示出第一扶手的主视图,
图3示出第一扶手的俯视图,
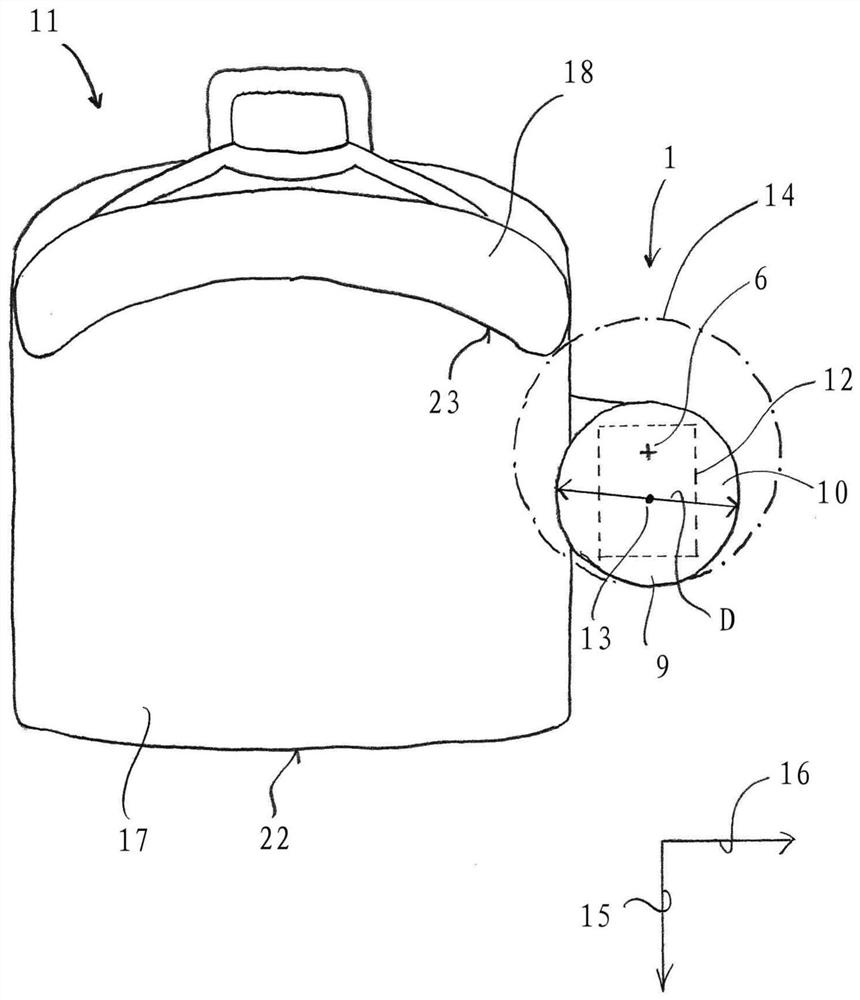
图4示出具有第二扶手的椅子的俯视图,
图5示出图4中的椅子,其中,所述扶手支架彼此间具有最小间距,
图6示出图4中的椅子,其中,所述扶手支架彼此间具有最大间距,
图7示出图4中的椅子,其中,所述扶手支架在最大向前朝向座位前缘方向调节的位置中,
图8示出图4的椅子,其中,所述扶手支架在最大向后朝向靠背方向调节的位置中。
所有附图非符合尺寸地示出本发明,在此仅示意性地且仅以本发明的基本组成部分示出本发明。相同的附图标记在此相应于相同或相似功能的元件。
具体实施方式
如图所示,扶手1包括高度可调的、尤其是可伸缩式构造的扶手柱2,该扶手柱在其上端部以支承头3终止。为了调节扶手1的高度,设有操作杆4,该操作杆突出穿过扶手柱2的向外侧敞开的开口。扶手柱2可以借助在其下脚端部处水平延伸出的扶手载体5固定在办公椅11的下部结构(未示出)上。
扶手1包括扶手支架9,该扶手支架设置在扶手柱2的支承头3上并且围绕竖直转动轴线6相对于扶手柱2能转动360°。该转动轴线6是扶手1的唯一的转动轴线。扶手支架9具有一个唯一的旋转自由度。
扶手支架9通过未进一步说明的基体可转动地固定在支承头3上。与该基体不可相对转动地连接的支架体(同样未进一步说明)提供用于支撑椅子11使用者手臂的支架面10。扶手支架9的设定的支架使用面12在图4中以虚线示出,该支架使用面必须存在于扶手支架9的每个位置中。该设定的支架使用面12是支架面10的部分面。
在图1至图3所示的扶手1中,支架体9是椭圆形的。扶手支架最大尺寸D和扶手支架最小尺寸d的商q'适用于1.00≤q'≤1.10。
在图4至图8所示的扶手1中,支架体9是圆形的。扶手支架最大尺寸D和扶手支架最小尺寸d的商q'适用于q'=1.00。
在两种情况下,转动轴线6设置为偏心于支架体9的中心13。由扶手支架最大尺寸D和偏心距e得出的偏心商q在4.4至4.6的范围内。
由于扶手支架9围绕偏心转动轴线6的可转动性,扶手支架9的多个位置是可能的。这些位置的总体限定调节范围14,该调节范围在图4以虚线示出。扶手支架9可以占据面14内的所有位置,该面14由一方面偏心距的尺寸和另一方面扶手支架形状限定地界定。
为了调节扶手支架9的位置,只需要握住扶手支架9并围绕转动轴线6转动。根据本发明,通过扶手支架9围绕转动轴线6的转动,同时进行扶手支架9的纵向和横向调节。换言之,使扶手支架9通过围绕转动轴线6转动而相对于扶手柱2沿纵向方向15和沿横向方向16运动。扶手支架9的选定位置在图5至图8中示出。图5至图8以俯视图示出具有座位17和靠背18以及两个扶手1的办公椅1。图7示出椅子11的中心纵向平面19。
详细示出:图5示出两个扶手支架,所述扶手支架彼此间具有最小间距20;图6示出两个扶手支架,所述扶手支架彼此间具有最大间距21;图7示出两个扶手支架,所述扶手支架在最大向前朝向座位17前缘22方向调节的位置中,并且图8示出两个扶手支架,所述扶手支架在最大向后朝向靠背18前侧23方向调节的位置中。扶手支架9的形状和尺寸选择为,使得在扶手支架9的每个位置中都存在必要的支架使用面12。
通过本发明可能的是,通过将一个或两个扶手支架1围绕其竖直转动轴线6进行转动,将椅子1的所述两个扶手支架1相对于彼此或相对于椅子1的其它部件(特别是相对于靠背18、特定地相对于靠背前侧23、座位17、特定地相对于座位前缘22)以各种不同的间距20、21来定位。以这种方式,扶手支架9能以特别简单的方式单独定位。
对于扶手支架9在转动范围内360°的偏转,不需要触发按钮或类似物。优选地,扶手支架9围绕转动轴线6的360°转动闭锁地进行,即具有限定的闭锁位置。为此目的,既在扶手支架9上又在支承头3上设有(未示出的)配合作用的闭锁元件,所述闭锁元件构成无触发按钮而可操作的闭锁机构。为了实现闭锁的转动运动,优选地设有闭锁级,所述闭锁阶梯与(未示出的)闭锁阻挡元件配合作用,其中,能使该闭锁阻挡元件在未操作触发按钮或类似物的情况下克服阻力运动,并且在变形情况下使该闭锁阻挡元件从一个闭锁阶梯运动到下一个闭锁阶梯。优选地,闭锁阶梯在两侧都设有相同的起动斜面,从而可以以相同的力消耗来进行前进和后退运动。由于使用这种闭锁机构,因此不需要触发按钮。期望的扶手支架位置的调整因此以操作技术的最小消耗来完成。
附加地,可以设有由合适的机构形成的(未示出的)锁定装置,以用于锁定扶手支架9的转动。在锁定状态中,扶手支架9固定在扶手柱2上的限定的转动位置中。
本发明涉及一种扶手、特别是用于办公椅的扶手。为了能以简单的机构实现椅子扶手在更宽范围内的可调节性,提出一种与优选高度可调的扶手柱2连接的、具有一个唯一自由度的扶手支架9,该扶手支架通过围绕转动轴线6的转动而能相对于扶手柱2沿纵向方向15和沿横向方向16运动。
所有在说明书、接下来的权利要求和附图中示出的特征既可以单独地又可以有创造性价值地彼此任意组合。
附图标记列表
1 扶手
2 扶手柱
3 支承头
4 操作杆
5 扶手载体
6 转动轴线
7 (无)
8 (无)
9 扶手支架
10 支架面
11 椅子
12 设定的最小支架使用面
13 扶手支架中心
14 调节范围
15 纵向方向
16 横向方向
17 座位
18 靠背
19 中心纵向平面
20 最小间距
21 最大间距
22 座位前缘
23 靠背前侧
- 扶手、椅子、用于调节扶手的方法
- 用于调节椅子的扶手的位置的装置