车辆安全系统
文献发布时间:2023-06-19 12:22:51
技术领域
本发明涉及用于车辆、尤其是商用车的车辆安全系统,该车辆安全系统具有制动系统,制动系统包括驻车制动器,其中,驻车制动器能在行驶位置与制动位置之间切换,其中,车辆安全系统被构造成用于在发生事故后保障车辆安全并具有控制单元,该控制单元被构造成用于获知车辆发生事故并且被构造成用于当获知了车辆发生事故时将车辆的驻车制动器切换到制动位置中。此外,本发明还涉及用于保障车辆安全的方法以及具有车辆安全系统的车辆。
背景技术
为了保障车辆的、尤其是商用车的乘员的安全,普遍期待的是对车辆进行自动化制动。尤其地,可以有助于在事故发生后立即制动车辆,例如以便在发生进一步的碰撞时便于移动车辆或营救事故中的受害者。在发生事故时,救援人员往往面临如下问题,即,在开始救援之前必须保障事故中的车辆安全,以便排除对救援人员的附加伤害。取决于车辆的负载状态和事故发生地,这可能会为此花费时间和大量的助手,由此将延迟救援事故中的受害者的时间。在涉及多辆车辆发生事故中,该问题尤为突出。
尤其地,当事故中涉及诸如载重车辆的商用车时,往往出现以下问题:即,必须从变形的舱室中救出商用车的驾驶员。在大多情况下,在此使用液压救援缸是不足够用于必须将商用车的驾驶室拉开,其中,事先固定车辆是绝对必要的。在恢复翻倒的挂车或车辆时出现另外的问题是,在扶起时车辆的车轮被释放并在扶起后车辆开始滚动。尤其地,当使用可能由车辆自带的另外的辅助器件(例如起重机或钢索绞车)来扶起挂车或车辆时,救援人员可能会面临危险。
此外,特别是在繁忙的道路上,存在静止不动的车辆被另外的车辆撞到并被推向第三车辆的风险,由此可能会困住车辆乘员。
由现有技术中公知有在事故发生之前或之后应提高车辆安全性的系统。DE 102007 052 439 A1公开了一种用于机动车的驾驶员辅助系统,其具有至少一个用于检测表征机动车的当前或未来的运动状态的运行数据的运行数据传感器和电控制部,该电控制部被构造成用于在存在预先确定的运行数据时触发对机动车的自动紧急制动。此外设置的是,电控制部被设立成用于在紧急制动即将发生之前、期间或之后使机动车的驻车制动器处于激活位置中。此外,当触发了车辆的安全气囊时,电控制部可以发送驻车信号。
DE 10 2011 114 072 B4公开了一种具有控制部的驾驶员辅助系统,该控制部被构造成用于处理被探测装置检测到的行驶数据,并且在存在预先确定的行驶数据时,制动装置引发执行对车辆的自动制动。该控制部被构造成用于即使在车辆已经自动减速到预先限定的速度之后或在处于静止状态中时,也保持压紧制动装置并且/或者压紧另外的制动装置,以便将车辆保持在制动状态下。通过操纵加速踏板,可以松开车辆的制动装置,并可以再次以自身力让车辆运动。
由DE 10 2007 050 221 A1还公开了一种用于机动车的驾驶员辅助系统,该驾驶员辅助系统在存在预先确定的行驶数据时触发机动车的自主紧急制动。当前方车辆探测装置探测到前方车辆时,电控制部被设立成用于在紧急制动后将机动车的制动器保持在制动位置中或将其置于制动位置中。
对于在先公知的系统起作用来说必要的是,在事故发生之前进行紧急制动或触发车辆的安全气囊。然而,当静止的车辆被另外的车辆撞坏时,则该静止的车辆在事故发生之前和/或期间不执行紧急制动并且不存在相应的紧急制动信号。例如,当第一车辆将静止的第二车辆推移向第三车辆或其他障碍物时,可能是这种情况,由此使得第二车辆的驾驶员被困住。这种情况往往尤其发生在堵车时的追尾事故中。此外,在每种碰撞状况下都确保不了安全气囊的触发。因此,上述系统大多数仅适用于特定的事故状况,例如正面碰撞。
发明内容
因此,本发明的任务在于提供与现有技术相比得到改善的功能的车辆安全系统。尤其地,因此便于对受事故的受害者进行抢救和保障事故现场安全。
在第一方面中,本发明在车辆安全系统中通过用于检测和提供表示车辆的转动位置的第一车辆数据的传感器单元来解决前述任务,该控制单元被构造成用于执行基于第一车辆数据执行对事故的获知。
车辆的转动位置描述了车辆在空间中的定向。转动位置的变化由车辆的旋转和/或摇摆运动所引起。尤其地,转动位置描述了相对车辆固定的笛卡尔坐标系的轴线相对于地球的坐标系的位置,其中,相对车辆固定的坐标系由车辆的竖轴线、横向轴线和纵向轴线限定。在此,纵向轴线从车辆的后方延伸至前方,并且竖轴线从车辆的车身底部延伸至与车辆的底部相对置的侧。横向轴线与纵向轴线和纵向轴线成直角延伸。车辆围绕其竖轴线的转动在此被称为偏航运动,围绕横向轴线的转动被称为俯仰运动,而围绕纵向轴线的转动被称为侧倾运动。优选地,车辆数据优选表示车辆相对地球坐标系的绝对的转动位置。还可以设置的是,除了车辆的绝对的转动位置之外或对此代替地,车辆数据还表示车辆的转动位置的变化和/或变化率。
控制单元被构造成用于获知车辆是否卷入事故中。该控制单元例如被构造成用于识别出车辆在发生追尾事故时何时停止并被第二辆车撞上。对该获知做出响应地,控制单元将车辆的驻车制动器切换到制动位置中。优选地,车辆的制动系统具有被构造为弹簧蓄能式制动器的驻车制动器,其中,控制单元优选被构造成用于使弹簧蓄能式制动器的弹簧蓄能器放气并且因此使驻车制动器处于制动位置中。通过控制单元基于第一车辆数据来执行对事故的获知,也就是说,获知车辆是否卷入事故中。由于第一车辆数据表示车辆的转动位置,因此即使当车辆静止不动、未提供紧急制动信号和/或未提供安全气囊信号时也能获知事故。因此,利用传感器单元以有利的方式扩展了事先已知的事故识别。例如,如果车辆卷入追尾事故中,则车辆可能会实施俯仰运动,该俯仰运动可以通过车辆的传感器单元检测到。然后,传感器单元提供表示车辆的俯仰运动的第一车辆数据。同样地,传感器单元可以检测车辆的例如在被侧撞时发生的偏航运动,和/或车辆的例如当车辆倾翻或滚翻时发生的侧倾运动,并提供相应的第一车辆数据。应理解,车辆也可以是挂车或具有挂车。优选地,传感器单元被构造成用于基于由外部的控制单元和/或外部的基础设施、尤其是交通引导系统提供的第一车辆数据来执行对事故的获知。
在第一优选的实施方式中,传感器单元具有转动率传感器,转动率传感器被构造成用于获知车辆围绕车辆的竖轴线、横向轴线和/或纵向轴线的转动位置的变化。但是,也可以设置的是,由转动率传感器给传感器单元提供第一车辆数据,该转动率传感器被构造成用于获知车辆围绕车辆的竖轴线、横向轴线和/或纵向轴线的转动位置的变化。优选地,传感器单元分别具有至少一个转动率传感器,以用于获知车辆围绕车辆的竖轴线、横向轴线和纵向轴线的转动位置的变化。然而,也可以设置的是,转动率传感器被构造成用于获知车辆围绕一个以上的轴线、特别优选是所有轴线的转动位置的变化。优选地,转动率传感器被构造成用于获知车辆的转动位置的变化率。转动位置的变化率描述了每单位时间车辆的其中至少一个车轴的角度变化。优选地,转动率传感器被构造成用于提供表示车辆的绝对位置的车辆数据。车辆的绝对位置描述了车辆相对于其所位于的路面的位置。也可以设置的是,控制单元被构造成用于基于由转动率传感器提供的第一车辆数据获知车辆的绝对位置。例如,绝对位置说明了车辆是否在斜坡上。优选地,控制单元被构造成用于获知车辆是倾翻还是滚翻。为此可以设置的是,控制单元被构造成用于识别车辆何时以车辆侧和/或车顶平放。
优选地,传感器单元具有车轴负载传感器,该车轴负载传感器被构造成用于获知车辆的车轴的车轴负载。特别优选地,车轴负载传感器和/或控制单元被构造用于获知车辆的车轴负载分布。车轴负载分布是车辆质量在车轴上的相对分布。优选地,车轴负载分布也可以是车辆的车轮上的相对质量分布。如果车辆卷入事故中,则车辆的重心由于惯性效应而改变,由此也改变了车轴和/或车轮上的车轴负载分布或车轴负载。因此,车轴负载分布表示了车辆的转动位置。获知车轴负载也尤其适用于获知车辆安全气囊未触发的事故。当例如第二车辆行进到挂车下面或第一车辆尾部时,则即使当第一车辆的安全气囊由于第一车辆被追尾而没有展开,第一车辆的车轴负载也将改变。
此外,车轴负载分布适用于获知车辆的绝对位置。例如,如果车辆侧翻或如果车辆以车顶平放,则车辆的车轴至少部分地被去负载,从而可以确定车辆的绝对位置。此外,优选地,通过如下方式获知车辆在斜坡上的布置,即,与车辆在水平面上的布置相比车轴负载分布被持久地改变。优选地,传感器单元具有至少一个车轴负载传感器和至少一个转动率传感器。
在优选的改进方案中,控制单元适合用于在考虑到车辆数据的时间变化曲线的情况下执行对事故的获知。优选地,控制单元优选具有存储器,该存储器被构造成用于存储其中多个第一车辆数据。控制单元可以被构造成用于获知车辆数据的时间变化曲线。但是也可以设置的是,传感器单元提供车辆数据的时间变化曲线。车辆数据的时间变化曲线在此优选包括在时间上相继的多个车辆数据。提供车辆数据的提供频率优选在从1Hz至1000kHz的范围内,优选在1Hz至100Hz、优选在1Hz至10kHz、优选在10Hz至100kHz、优选在100Hz至100kHz的范围内。特别优选在100Hz至200Hz的范围内。
优选地,控制单元被构造成用于对事故获知做出响应地除了车辆的驻车制动器之外还将车辆的行车制动器切换到制动位置中。因此,即使当由于事故而损坏了驻车制动器时,优选也可以确保对车辆的安全制动。此外,可以提高制动效果,由此改善了保障车辆的安全。但是也可以设置的是,控制单元被构造成用于仅将车辆的行车制动器切换到制动位置中。
优选地,控制单元被构造成用于基于所提供的车辆数据来获知车辆的所有车轮是否都静止不动,其中,控制单元特别优选被构造成用于只有当车辆的所有车轮都静止不动时接入驻车制动器。例如,因此可以防止当车辆处于运动时接入车辆的驻车制动器。在驾驶期间接入驻车制动器会导致车轮抱死。
在优选的实施方式中,控制单元被构造成用于基于车辆数据和车辆信号来执行对事故的获知,该车辆信号由车辆的车辆子系统、优选是车轮转速传感器、发动机控制器、中央的主控制单元、油压传感器、冷却剂传感器、联接力传感器、加速度传感器、环境传感器和/或弯折角度传感器提供。环境传感器优选是相机、超声传感器、雷达和/或激光雷达传感器。
车辆的子系统是功能单元,这些功能单元在功能上协同作用以用于满足一个或多个车辆功能。例如,车辆的冷却水系统可以被用于冷却车辆的发动机。车辆的制动系统也是子系统。应理解,车辆的子系统也可以划分为另外的子系统。例如,车辆的制动系统可以具有前车轴制动回路和后车轴制动回路。优选地,车辆信号由车辆的中央的控制单元提供。但是也可以设置的是,子系统直接提供车辆信号。通过基于车辆数据和车辆信号对事故的获知,使得可以提高获知的准确性、质量和/或速度。
优选地,车辆子系统是弯折角度系统,其被构造成用于获知表示车辆与联接在车辆上的挂车之间的弯折角度的弯折角度信号。特别是侧面碰撞会导致弯折角度非常迅速的变化。还可以设置的是,基于多个车辆信号来执行对事故的获知。车辆信号在此可以仅由车辆的一个子系统或由多个不同的子系统提供。例如,另外的车辆信号可以表示车辆的转向运动。对获知车辆发生事故补充地,还可以有利地考虑使用表示转向运动和弯折角度的车辆信号。优选地,控制单元可以被构造成用于获知弯折角度的变化是否是由于车辆的转向运动所引起的。应理解,控制单元也可以基于第一车辆数据和多个车辆信号来执行对事故的获知。
优选地,控制单元被构造成用于确定车辆信号是否满足预先限定的信号标准,并且只有当车辆信号满足信号标准时才获知车辆发生事故。信号标准例如可以是超过或低于车辆的前车轴的预先限定的车轴负载和/或弯折角度的预先限定的变化率。车辆信号优选是用于获知车辆发生事故的必要的先决条件。车辆信号于是被用于检查基于第一车辆数据获知的车辆事故的合理性。例如,如果控制单元基于第一车辆数据获知事故,但是车辆信号对应于表示未发生事故的信号,则控制单元获知不存在事故。但是也可以设置的是,对车辆信号和第一车辆数据进行加权以获知车辆发生事故。当例如第一车辆数据表示了车辆的转动位置发生特别快速且大的变化时,则可以设置的是,在获知事故时给车辆信号以较小的权重。因此,例如在车辆的转动位置的变化和/或变化率特别大的情况下,当车辆信号表示未发生事故时,则也获知事故。此外可以设置的是,在获知事故时就其重要性给第一车辆数据和车辆信号固定的权重。尤其地,在获知第一车辆数据和车辆信号时在使用误差率的情况下进行加权。
在优选的实施方式中,车辆信号是转向信号、车辆的供电电压信号、车轮转速信号、发动机信号、油压信号、冷却剂液位信号、联接力信号、环境传感器的环境信号和/或弯折角度信号。优选地,控制单元被构造成用于基于转向信号获知是否存在用户和/或车辆的中央的控制单元的转向指令。优选地,控制单元被构造成用于基于转向信号和第一车辆数据获知由第一车辆数据所表示的车辆的转动位置的变化是否由转向运动引起。车轮转速信号尤其表示车辆的运动。优选地,控制单元被构造成用于基于车轮转速信号获知车辆是否静止不动。此外,控制单元优选被构造成用于基于供电电压信号来获知车辆的子系统、尤其是车辆的电的子系统是否具有故障。如果例如电的子系统在事故中被破坏或与车辆的电压供应部分开,这会导致供电电压信号发生短暂变化,并且因此表明发生了事故。冷却剂液位信号允许得出有关车辆冷却回路是否损坏的结论。例如,冷却剂液位的迅速下降被归入冷却剂系统受到损坏,这可能是由事故引起的。优选地,车辆的冷却剂液位的下降由冷却剂水平信号表示,其中,控制单元被构造成用于获知冷却剂水平的下降。
在优选的改进方案中,控制单元被构造成用于对由车辆的加速踏板提供的行驶信号做出响应地并且/或者对由紧急松开装置提供的紧急松开信号做出响应地,将车辆的驻车制动器置于行驶位置中。当必须改变车辆的位置以确保事故现场安全或救助受事故的人员时,这将是有利的。优选地,紧急松开装置布置在车辆的外部。由此可以方便救援人员的触及。
优选地,车辆安全系统集成到车辆的电子的制动系统中。这能够实现特别紧凑的结构形式和/或装配成本的降低。应理解,车辆安全系统的部件也可以同时是电子的制动系统的部件。例如,电子的制动系统的中央的控制单元也可以是车辆安全系统的控制单元。此外,借助电子的制动系统的电压供应部可以对车辆安全系统供电。
优选地,车辆安全系统具有紧急呼叫系统,该紧急呼叫系统被构造成用于对获知车辆发生事故做出响应地触发紧急呼叫。通过触发紧急呼叫,可以确保尽快救出受事故的人员。优选地,控制单元被构造成用于驱控车辆的通信装置以用于触发紧急呼叫。但是也可以设置的是,车辆安全系统具有紧急呼叫装置,该紧急呼叫装置被构造用于发送紧急呼叫信号。特别优选地,控制单元被构造成用于获知车辆的定位并在触发紧急呼叫时发送车辆的定位。
优选地,控制单元被构造成用于与车辆的紧急制动信号和/或安全气囊信号无关地获知事故。由此以有利的方式实现,当在事故发生之前没有执行车辆的紧急制动和/或未触发车辆的安全气囊时,也可以获知车辆发生事故。优选地,紧急呼叫具有特定于车辆的信息和/或关于车辆中的载荷的信息,其中,这些信息特别优选地被预先存储在车辆安全系统的存储器中。通过特定于车辆的信息和/或载荷信息使救援人员能够实现提供与这些信息相协调的辅助器件和用于救援的救援设备。
在另外的优选的实施方式中,车辆安全系统还具有牵引紧固部,该牵引紧固部被构造成用于紧固外部的牵引设备,其中,控制单元被构造成用于获知是否有牵引力被施加到该牵引紧固部上并且当施加有牵引力时驻车制动器是否被置于制动位置中。但是也可以设置的是,牵引紧固部是纯机械的牵引紧固部。优选地,牵引紧固部布置在车辆的驾驶舱室上,尤其是布置在车辆的发动机罩下方。
根据第二方面,本发明通过用于在发生事故时利用车辆安全系统来保障车辆、尤其是商用车安全的方法来解决开头所述的任务,该方法具有以下步骤:借助传感器单元检测车辆数据,将车辆数据提供给控制单元,通过控制单元在使用车辆数据的情况下获知车辆发生事故,当控制单元获知车辆发生事故时,通过控制单元将车辆的驻车制动器置于制动位置中,其特征在于,车辆数据表示车辆的转动位置。优选地,借助车辆的车辆数据总线系统将车辆数据提供给控制单元。优选地,车辆数据总线系统是CAN总线系统、LIN总线系统、FlexRay总线系统和/或MOST总线系统。可以设置的是,控制单元在传感器单元上询问车辆数据,并且/或者传感器单元将车辆数据发送给控制单元。优选地,车辆安全系统是根据本发明的第一方面的车辆安全系统。
优选地,通过控制单元在使用车辆数据的情况下获知车辆发生事故的步骤具有:基于第一车辆数据通过控制单元获知车辆的转动加速度的值,将所获知的转动加速度与预先限定的极限值进行比较,并且当转动加速度的值超过预先限定的极限值时,确定车辆发生事故。由于出现的高能量,使得事故大多特征在于具有非常高的加速度值。如果例如车辆发生滚翻,则围绕车辆的横向轴线和/或纵向轴线的角加速度的值将非常高。如此高的加速度值优选高于预先限定的极限值,从而使得控制单元获知车辆卷入事故中。
在优选的改进方案中,通过控制单元在使用车辆数据的情况下获知车辆发生事故的步骤具有:通过控制单元基于第一车辆数据获知车辆的绝对位置,获知所获知的车辆的绝对位置是否在预先限定的的目标位置区域内,并且如果当所获知的绝对位置优选在车辆的预先限定的时间段内不在目标位置区域内,则确定车辆发生事故。优选地,当车辆处于正常驾驶位置中时,绝对位置处于预先限定的目标位置区域内。优选地,当车辆侧翻和/或车辆的一个或多个车轮未受载时,车辆不在目标位置区域内。
优选地,传感器单元具有转动率传感器。然后,转动率传感器优选被构造成用于提供第一车辆数据。
此外优选地,传感器单元具有车轴负载传感器。当传感器单元具有车轴负载传感器时,通过控制单元基于第一车辆数据获知车辆的转动加速度的值的步骤优选具有:获知在第一时间点的车辆的第一车轴负载分布,获知在第二时间点的车辆的第二车轴负载分布,从第一车轴负载分布和第二车轴负载分布获知车轴负载变化,基于车轴负载变化和从第一时间点到第二时间点经过的时间间隔获知车轴负载变化率,并且基于车轴负载变化率获知车辆的转动加速度。应理解,车轴负载分布也可以表示车辆的各个车轮上的负载分布。此外,传感器单元也可以具有多个车轴负载传感器,特别优选地,车辆的每个轮胎各具有车轴负载传感器。车轴负载传感器例如可以是布置在空气悬挂系统的空气弹簧气囊中的压力传感器。
在优选的改进方案中,通过控制单元基于第一车辆数据获知车辆的绝对位置的步骤具有:获知车辆的绝对车轴负载,将车辆的绝对车轴负载与车辆的预先限定的最小车轴负载进行比较,当车辆的绝对车轴负载优选在比预先限定的时间段更长的时间段内低于预先限定的最小车轴负载时,获知车辆已倾翻。如果车辆翻倒,则车辆的车轴在与事故相关的时间段或持久性地被去负载。通常,在此,在车轴本身上往往缺少车辆自身重量的负载。在正常运行情况下不设置有这种状况,并且因此表示了车辆倾翻和/或发生事故。同样地,例如在发生追尾的情况下,车辆的后车轴也可能由于惯性力而被持久地或暂时地被加负载或去负载。
根据优选的实施方式,该方法还具有:提供车辆子系统的、优选是车轮速度传感器的、发动机控制器的、车辆的主控制单元的、油压传感器的、冷却剂传感器的、联接力传感器的和/或弯曲角度传感器的车辆信号,通过控制单元将车辆信号和/或车辆信号的时间变化曲线与预先限定的信号标准进行比较,其中,通过控制单元在使用车辆数据的情况下获知车辆发生事故的步骤具有:基于车辆数据以及车辆信号和/或车辆信号的时间变化曲线与预先限定的的信号标准的比较获知车辆发生事故。车辆信号的时间变化曲线优选描述了车辆信号的时间序列。该时间序列优选是连续的,但是也可以设置的是,车辆信号的时间变化曲线是数字式的时间变化曲线。此外,也可以通过使用从车辆信号的时间变化曲线推导出的数据来实现获知事故。
优选地,只有当车辆信号和/或车辆信号的时间变化曲线满足预先确定的信号标准时,才通过控制单元将驻车制动器切换到制动位置中。优选地,当车辆信号的预先确定的份额低于或超过预先限定的极限值时,则满足信号标准。同样地,当车辆信号的时间变化曲线具有预先限定的变化率时,则同样可以优选满足信号标准。例如,车辆的发动机的油压信号急剧下降可以指示油压系统由于车辆事故引起泄漏。在优选的设计方案中,当缺少车辆信号时,满足了信号标准。在发生事故的情况下,车辆的子系统经常被破坏,从而这些子系统不再能够提供车辆信号。因此,缺少车辆信号就能够指示出车辆发生事故。因此,优选地,控制单元可以被构造成用于基于缺少车辆信号来获知事故。优选地,只有当缺少至少两个彼此无关的车辆信号时才获知事故。此外,当车辆的中央的控制单元提供超时信号时,优选可以满足信号标准。当车辆子系统不提供信号时,中央的控制单元优选提供超时信号。当借助中央的控制单元向车辆安全系统提供一个或多个车辆信号时,这是尤其值得期待的。
在优选的设计方案中,车辆信号是发动机转速信号、油压信号、车轮转速信号、冷却剂液位信号、弯折角度信号、联接力信号、转向角度信号、加速度信号、安全气囊信号和/或车辆制动信号。优选地,制动信号是紧急制动信号。安全气囊信号优选表示了车辆的安全气囊被触发。此外,安全气囊信号也可以是如下信号,安全气囊控制部基于该信号引发触发安全气囊的信号。
优选地,该方法还具有:操纵车辆的加速踏板,对该操纵做出响应地通过加速踏板提供行驶信号,并且当提供行驶信号时通过控制单元松开驻车制动器。
在优选的实施方式中,该方法还具有:当获知车辆发生事故时,触发紧急呼叫。特别优选地,紧急呼叫的触发具有向车辆的通信装置提供紧急呼叫信号。此外优选地,触发紧急呼叫具有借助车辆安全系统的控制单元获知车辆的定位并发送表示车辆的定位的紧急呼叫信号。
根据第三方面,本发明利用车辆、尤其是商用车来解决开头所述的任务,该车辆具有根据本发明的第一方面的车辆安全系统,该车辆安全系统被构造成用于执行根据本发明的第二方面的方法。应理解,根据本发明的第一方面的车辆安全系统、根据本发明的第二方面的用于保障车辆安全的方法以及根据本发明的第三方面的车辆具有与从属权利要求中尤其记录的相同或相似的子方面。就这方面来说,针对这些方面完全参考以上描述。
附图说明
现在下面结合附图描述本发明实施方式。这些附图不一定尺寸精确地示出实施方式,而是将被用于阐述的附图以示意性和/或稍微失真的形式来实施。有关由附图可直接得到的教导的补充内容,参见相关的现有技术。在此要考虑到,可以对实施方式的形式和细节进行相关的各种改型或变换,而不偏离本发明一般思路。在说明书、附图以及权利要求中公开的本发明的特征,无论是单独地,还是任意组合地,都对本发明的改进方案具有重要意义。此外,在说明书、附图和/或权利要求中公开的至少两个特征的所有组合都落入到本发明范围内。本发明的一般思路不局限于以下所示和所述的优选实施方式的确切形式或细节,也不局限于与权利要求请求保护的主题相比受限的主题。就设定的测量范围而言,在所述提到的极限范围内的值也应当作为极限值公开,并且可以任意使用,并且受到权利保护。相同或类似部分或者功能相同或类似的部分在那里处于简单目的使用相同的附图标记。
本发明的其他优点、特征和细节由下面对优选实施方式的描述并结合附图得到;其中:
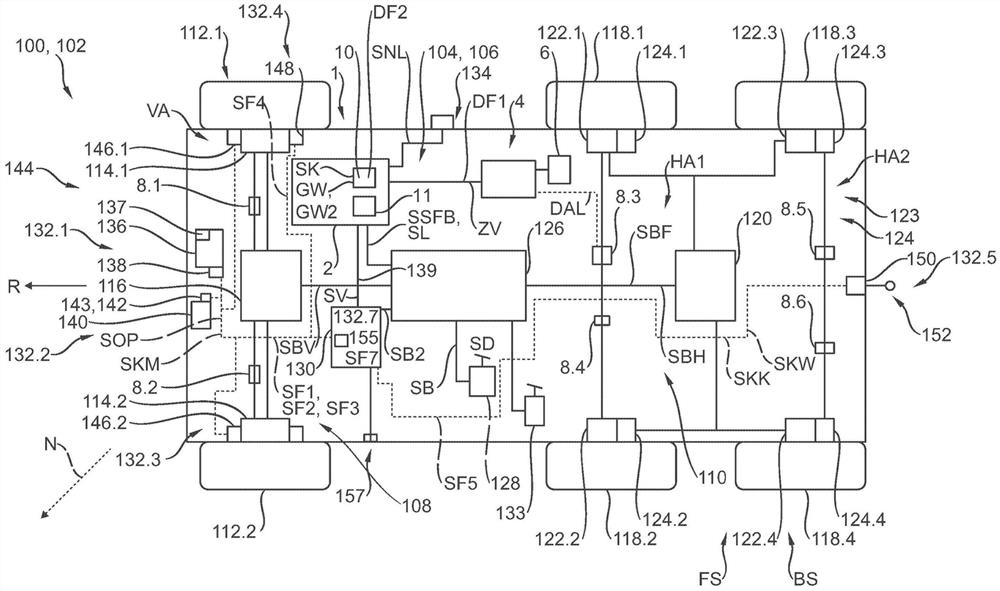
图1示出具有根据第一实施例的车辆安全系统的车辆的示意图;
图2A示出根据第一实施例的车辆的偏航运动的示意图;
图2B示出根据第一实施例的车辆的俯仰运动的示意图;
图2C示出根据第一实施例的车辆的侧倾运动的示意图;
图3A示出根据第一实施例的车辆的示意性的俯视图,该车辆与挂车联接;
图3B示出根据图3A的车辆的示意性的俯视图,其中,挂车与车辆之间的弯折角度相对于图3A发生改变;
图4示出根据本发明的第二方面的方法的第一优选实施例的示意性的流程图表;
图5示出具有分步骤的根据第一实施例的方法的示意性的流程图表;
图6示出该方法的第二优选的实施例的示意性的流程图表;
图7示出分步骤和子步骤示出根据第一实施例的方法的示意性的流程图表;
图8示出方法的第三优选的实施例的示意性的流程图表,该方法是第一或第二实施例的改进方案;并且
图9示出方法的第四优选的实施例的示意性的流程图表,该方法是第一或第二实施例的改进方案。
具体实施方式
车辆100、尤其是商用车102具有制动系统104,该制动系统在此被构造为能电子控制的气动的制动系统106。在此,制动系统104具有前车轴制动回路108和后车轴制动回路110。但是也可以设置的是,车辆100具有用于车辆100的所有车轴的组合的制动回路,即用于车辆的左侧和右侧的两个制动回路和/或两个以上的制动回路。尤其地,车辆100也可以具有挂车制动回路。为了对车辆100的前车轮112.1、112.2进行制动,前车轴制动回路108具有经由前车轴调制器116驱控的前车轴行车制动缸114.1、114.2。为了对后车轮118.1、118.2、118.3、118.4进行制动,后车轴制动回路110以类似的方式具有后车轴调制器120和与后车轴调制器连接的后车轴行车制动缸122.1、122.2、122.3、122.4。后车轴行车制动缸122.1、122.2、122.3、122.4和前车轴行车制动缸114.1、114.2在此是车辆100的行车制动器123的组成部分。
此外,制动系统104包括具有驻车制动缸124.1、124.2、124.3、124.4的驻车制动器124,这些驻车制动缸在此与后车轴行车制动缸122.1,122.2、122.3、122.4组合在所谓的三挡(Tri-Stop)缸中。但是也可以设置的是,将驻车制动缸124.1、124.2、124.3、124.4设置为单独的驻车制动缸。此外,驻车制动器124也可以被设置成用于制动前车轮112.1、111.2。
能电子控制的气动的制动系统106还具有中央的制动控制单元126,该中央的制动控制单元被设置成用于驱控前车轴制动回路108和后车轴制动回路110。中央的制动控制单元126与制动值发送器128连接。通过操纵制动值发送器128,车辆100的驾驶员可以向中央的制动控制单元126提供制动预给定参数SB,然后中央的制动控制单元向前车轴制动回路108提供前车轴制动信号SBV,并向后车轴制动电路110提供后车轴制动信号SBH。然后,行车制动缸114、122根据分别配属的前车轴制动信号SBV或后车轴制动信号SBH被各自的前、后车轴制动调制器116、120驱控。此外,中央的制动控制单元126还可以基于由车辆100的主控制单元130提供的电子的制动预给定参数SB2来驱控前车轴制动回路108和后车轴制动回路110。此外,中央的制动控制单元126被构造成用于为驻车制动器124提供驻车制动信号SBF。在该实施例中,中央的制动控制单元126将驻车制动信号SBF提供给后车轴调制器120,后车轴调制器被构造成用于基于驻车制动信号SBF来驱控驻车制动缸124.1、124.2、124.3、124.4。
为了在发生事故U之后保障车辆100安全,车辆100具有车辆安全系统1。车辆安全系统1的控制单元2与中央的制动控制单元126连接,并且被构造成用于将车辆100的驻车制动器124切换到制动位置BS中。为了将驻车制动器124切换到制动位置BS中,控制单元2将安全驻车制动信号SSFB提供给中央的制动控制单元126,该中央的制动控制单元被构造成用于对安全驻车制动信号SSFB的提供做出响应地为驻车制动器124提供驻车制动信号SBF。但是也可以设置的是,控制单元2与后车轴调制器120和/或与驻车制动器124的驻车制动缸124.1、124.2、124.3、124.4连接,并且直接将安全驻车制动信号SSFB提供给后车轴调制器120和/或驻车制动缸124.1、124.2、124.3、124.4。
车辆安全系统1的传感器单元4与控制单元2连接。传感器单元4被构造成用于提供第一车辆数据DF1,该第一车辆数据表示了车辆100的转动位置LD。在此,传感器单元4具有转动率传感器6,该转动率传感器被构造成用于获知围绕车辆100的竖轴线AH、横向轴线AQ和/或纵向轴线AL(未在图1中示出的轴线)的车辆100的转动位置LD的变化。此外,传感器单元4具有六个车轴负载传感器8.1、8.2、8.3、8.4、8.5、8.6,它们被构造成用于获知车辆100的车轴负载。在此,车轴负载传感器8.1、8.2、8.3、8.4、8.5、8.6被构造成用于获知车辆100的前车轮112.1、112.2和后车轮118.1、118.2、1803、118.4上的各自的车轮负载。但是也可以设置的是,车轴负载传感器8.1、8.2、8.3、8.4、8.5、8.6被构造成用于获知在车轴的车轮上的车轴负载。应理解,车轴负载传感器8.1、8.2、803、8和4、8.5、8.6和/或转动率传感器6也可以被构造成用于提供数据,并且控制单元2被构造成用于基于所提供的数据来获知车辆100的转动位置LD和/或车辆100的车轴负载的变化。此外,传感器单元4还可以具有多个转动率传感器6。
图2A-2C清楚示出了车辆100的转动位置LD的变化,其中,为了清楚起见,在图2A-2C中未示出车辆100的一些部件。图2A示出了车辆100围绕其竖轴线AH的转动位置LD从起始定位(实线)到最终定位(虚线)的变化。在图2A中,车辆100的竖轴线AH指向图面之外。车辆100围绕竖轴线AH的转动位置LD的变化通常也被称为偏航运动。偏航运动可以通过偏航角度α表征,该偏航角度可以在起始定位中的横向轴线AQ1的位置与在最终定位中的横向轴线AQ2的位置之间测得。以类似的方式,也可以在起始定位中的纵向轴线AL1和最终定位的纵向轴线AL2之间获知偏航角度α。
图2B清楚示出了车辆100围绕其横向轴线AQ的转动位置LD的变化,该横向轴线在图2B中垂直于图面。在起始定位(实线)中,车辆100利用前车轮112.1、112.2和后车轮118.1、118.2、118.3、118.4站立在路面200上,其中,车辆100的竖轴线AH1垂直于路面200。在最终定位(虚线)中,车辆100的转动位置LD与起始定位相比发生改变,其中,转动位置LD的改变可以通过俯仰角度β表征,该俯仰角度在起始定位中的竖轴线HA1的位置与最终定位中的竖轴线HA2的位置之间测得。此外,俯仰角度β也可以在起始定位中的纵向轴线与最终定位中的纵向轴线之间获知(图2中未示出)。车辆100围绕其横向轴线AQ的转动位置LD的变化也被称为俯仰运动。在该实施例中,后车轮118.1、118.2、118.3、118.4在最终定位中从路面200抬起。例如当车辆100撞上突出的障碍物时,这可能短暂地发生。应理解,俯仰运动也可能在车轮112、118不抬离的情况下进行,例如由于后车轮118的悬架部分地或完全地去负载而发生。
图2C示出了车辆100的侧倾运动,其对应于车辆100围绕其纵向轴线AL的转动位置LD的变化。车辆的纵向轴线AL在图2C中垂直于图面地布置。侧倾运动具有的表征在于具有侧倾角度γ,该侧倾角度在起始定位(实线)中的竖轴线HA1与最终定位(虚线)中的竖轴线HA2的位置之间测得。侧倾角度γ也可以在起始定位和最终定位中的车辆的横向轴线QA之间获知(图2C中未示出)。
如果车辆100卷入事故U中,则有力(未示出)作用到车辆100上,该力并不作用在车辆100的重心SP上并且导致车辆100发生偏航运动和/或俯仰运动和/或侧倾运动。车辆100的转动位置LD由于偏航、俯仰和/或侧倾运动而改变,传感器单元4就被构造成用于提供表示车辆100的转动位置LD的第一车辆数据DF1。优选地,传感器单元4被构造成用于提供表示车辆100的偏航运动、俯仰运动和/或侧倾运动的第一车辆数据DF1。
传感器单元4的转动率传感器6优选被构造成用于提供表示车辆100的偏航运动、俯仰运动和/或侧倾运动的数据。为此,传感器单元4的转动率传感器6优选布置在车辆100的重心SP中。然而,转动率传感器6也可以布置在车辆100的任意的定位处。此外,可以设置的是,传感器单元4具有多个转动率传感器6,其中,优选地分别针对车辆100的偏航运动、俯仰运动和侧倾运动设置至少一个转动率传感器6。优选地,第一转动率传感器6还可以提供表示围绕两个车辆轴线AH、AQ、AL的运动的数据,并且第二转动率传感器6被构造成用于提供表示围绕其余的第三车辆轴线的运动的数据。
特别优选地,转动率传感器6被构造成用于获知车辆100的转动位置LD的变化率并且/或者提供表示转动位置LD的变化率的第一车辆数据DF1。通常,在发生事故U期间,有强烈的力作用到车辆100上,该力导致转动位置LD的特别高的变化率。例如,如果第二车辆撞上静止不动的车辆100,则车辆100沿行驶方向R被急速加速。由于惯性效应,使得车辆100在此时发生俯仰运动,这导致俯仰角度β的变化率特别高。以类似的方式,在车辆侧向碰撞到、尤其是偏中地侧向碰撞到静止不动的车辆100时导致偏航运动,其特征在于偏航角度α的高的变化率。此外,侧向碰撞也可能导致车辆100侧倾运动。车辆100的滚翻的特征也在于车辆100发生侧倾运动,侧倾角度γ的变化率大。因此,变化率描述了车辆数据的时间变化曲线。
优选地,控制单元2还被构造成用于基于由转动率传感器6提供的第一车辆数据DF1来获知偏航运动、俯仰运动和侧倾运动的变化率。于是,第一车辆数据DF1表示偏航角度α的、俯仰角度β的和/或侧倾角度γ的变化率。为了获知偏航运动、俯仰运动和/或侧倾运动,控制单元4可以具有存储器10,该存储器例如被构造成用于存储表示车辆100的转动位置LD的第一车辆数据DF1。于是,控制单元4被构造成用于基于由传感器单元6提供的车辆数据DF1和/或基于存储在存储器10中的车辆数据DF1来获知车辆100的转动位置LD的变化率。然而,也可以设置的是,转动率传感器6被构造成用于获知车辆100的转动位置LD的变化率并将其提供给控制单元2。
优选地,控制单元2被构造成用于获知车辆100的转动位置LD的变化率是否超过预先限定的极限值GW,该极限值特别优选地被预先存储在存储器10中。优选地,极限值GW在由车辆100的无事故行驶运行中的转动位置LD的变化率限定的值范围之外。当基于第一车辆数据DF1获知的车辆100的转动位置LD的变化超过预先限定的极限值GW时,则控制单元2获知车辆100卷入了事故U中。对这种获知做出响应地,控制单元2然后将驻车制动信号SSFB提供给中央的制动控制单元126,以便将车辆100的驻车制动器124置于制动位置BS中。
此外,转动率传感器6还被构造成用于提供表示车辆100的绝对位置的第一车辆数据DF1。控制单元2还被构造成用于基于表示车辆100的绝对位置的车辆数据DF1来获知车辆100是否卷入事故U中。例如,在发生事故U之后,车辆100可能保持在图2C中通过虚线所示的最终定位中。于是,控制单元2可以被构造成用于获知车辆100的最终定位(其表示绝对位置)不对应于目标位置区域。目标位置区域优选具有关于垂直于路面200的竖轴线HA与当前的竖轴线HA的位置测得的-30°至+30°、优选为-20°至+20°、特别优选为-10°至+10°的侧倾角度γ的第一值范围。此外,目标位置区域优选具有关于垂直于路面200的竖轴线HA与当前的竖轴线HA位置测得的-30°至+30°、优选为-20°至+20°,特别优选为-10°至+10°的俯仰角部β的及第二值范围。因此,目标位置区域可以具有俯仰角度β和/或侧倾角度γ的值范围。如果所获知的车辆100的俯仰角度β和/或侧倾角度γ的值不在各自的目标位置区域内,则通过控制单元2可以获知车辆100发生事故U。此外,控制单元2可以被构造成用于检测第一车辆数据DF1的时间变化曲线并且基于第一车辆数据DF1的时间变化曲线获知车辆100是否卷入事故U中。特别优选地,控制单元2被构造成用于从第一车辆数据DF1获知车辆100的转动位置LD的变化率。例如,如果转动率传感器6在多个相继的时间点内提供了表示车辆100的绝对的转动位置LD的第一车辆数据DF1,则控制单元2可以从相继的车辆数据DF1的比较来获知转动位置LD的变化率。
根据该实施例,除了转动率传感器6之外,车辆安全系统1的传感器单元4还具有车轴负载传感器8.1、8.2、8.3、8.4、8.5、8.6。然而,应理解,传感器单元4也可以仅具有车轴负载传感器8.1、8.2、8.3、8.4、8.5、8.6和/或另外的传感器。车轴负载传感器8.1、8.2、8.3、8.4、8.5、8.6被构造成用于提供第一车辆数据DF1,该第一车辆数据表示了在车辆100的前车轮112.1、112.2和后车轮118.1、118.2、118.3、118.4上的相对和/或绝对的车轴负载。但是也可以设置的是,车辆100具有少于六个的车轴负载传感器8。优选地,传感器单元4在车辆100的每个车轴VA、HA1、HA2上分别具有至少一个车轴负载传感器8。特别优选地,传感器单元4在车辆100的每个车轮112.1、102、118.1、118.2、118.3、118.4上各具有一个车轴负载传感器8。优选地,车轴负载传感器8可以被构造为车辆100的空气弹簧元件中的压力传感器。
如图2C中清楚所示,车辆100的转动位置LD的变化引起车辆100的重心SP1从起始定位移位到最终定位中的重心SP2的位置。由此也改变了由车辆100的质量和车辆100的负载引起的车辆100的车轴和车轮114.1、114.2、118.1、118.2、118.3、118.4上的负载。例如,车辆100的前车轮112.1、112.2在图2C中所示的初始定位(实线)中被均匀加负载,而在最终定位(虚线)中左前车轮112.2被强烈加负载。通过图2B中清楚示出的俯仰运动,使得车辆100的在初始定位(实线)中被加负载的后车轮118.1、118.2、118.3、118.4从路面200抬起,从而使得这些后车轮在最终定位(虚线)中被完全去负载。因此,车辆100的转动位置LD的变化造成了车轴负载的变化,从而使得由车轴负载传感器8.1、8.2、8.3、8.4、8.5、8.6提供的车辆数据表示了车辆100的转动位置LD的变化。
于是,控制单元2可以基于车轴负载传感器8.1、8.2、8.3、8.4、8.5、8.6提供的第一车辆数据DF1来获知车辆100是否卷入事故U中。在此,控制单元2可以优选被构造成用于考虑到车轴负载变化ΔALV的时间变化曲线,也就是说车轴负载变化率ALR。尤其地,在此,尤其是将特征在于具有较大的车轴负载变化率ALR的车轴负载的快速变化归入车辆100发生事故U。然而,应理解,控制单元2也可以被构造成用于基于车轴负载的缓慢变化和/或绝对值获知车辆100发生事故U。例如,当车辆100已经倾翻并以车顶131平放时,车辆100的车轴VA、HA1、HA2被完全去负载。在常规行驶运行中,不设置车辆100的车轴完全去负载,从而使得控制单元2可以基于第一车辆数据DF1获知车辆100发生事故U。如果控制单元2获知车辆100发生事故U,则其将安全驻车制动信号SSFB提供给中央的制动控制单元126。
优选地,车辆安全系统1具有紧急呼叫系统11,该紧急呼叫系统在此集成到控制单元2中。然而,还可以设置的是,紧急呼叫系统11被单独地构成,或者紧急呼叫系统11是车辆100的中央的主控制单元130的紧急呼叫系统11,其由控制单元2驱控。紧急呼叫系统11被构造成用于当控制单元2基于第一车辆数据DF1获知车辆100发生事故U时,触发紧急呼叫N。例如,紧急呼叫系统11可以通知中央的救援控制中心信息。特别优选地,紧急呼叫系统11被构造成用于发送车辆100的当前定位。
在发生事故U之后的某些的状况下,可能有必要让车辆100运动。尤其地,当多个车辆彼此卡紧或当要清理事故现场时,就是这种情况。通过将驻车制动器124.1、124.2、124.3、124.4切换到制动位置BS中来防止车辆100运动。因此,车辆安全系统1可以被构造成用于提供松开信号SL用来松开驻车制动器124.1、124.2、124.3、124.4。优选地,车辆安全系统1的控制单元2在操纵车辆100的加速踏板133并且提供行驶信号SD时,提供松开信号SL。此外,当紧急松开装置134提供紧急松开信号SNL时,控制单元2可以优选地提供松开信号SL。在该实施例中,紧急松开装置134是安装在车辆100的一侧上的开关,该开关可以使救援人员容易够到。如果操纵紧急松开装置134,则车辆100的制动系统104被置于行驶位置FS中。在此,借助中央的制动控制单元126将制动信号SB和行驶信号SD提供给车辆安全系统1的控制单元2。但是也可以设置的是,行驶信号SD直接由加速踏板133提供给控制单元2,或者由主控制单元130提供给控制单元2。
车辆100在此具有多个车辆子系统132。车辆100的第一车辆子系统132.1包括发动机136和发动机传感器138,优选也包括发动机控制器137。发动机传感器138被构造成用于提供第一车辆信号SF1,其可以优选表示发动机136的发动机转速。发动机传感器138与车辆100的主控制单元130连接。主控制单元130将第一车辆信号SF1提供给车辆安全系统1的控制单元2。为此,主控制单元130和控制单元2可以借助车辆数据总线139连接。但是也可以设置的是,发动机传感器138直接将第一车辆信号SF1提供给控制单元2/或者发动机控制器(未示出)将第一车辆信号SF1提供给控制单元2。
在该实施例中,控制单元2被构造成用于在获知车辆100发生事故U时考虑至少一个车辆信号SF。优选地,通过考虑至少一个车辆信号SF可以提高获知车辆100发生事故U的可靠性。
例如,当另外的车辆撞上静止不动的车辆100时,则车辆100实施突然的俯仰运动,并且转动率传感器6提供表示该俯仰运动的第一车辆数据DF1。控制单元2实施第一车辆数据DF1与预先限定的极限值GW的比较。如在本示例中那样,当超过极限值GW时,则控制单元2获知车辆100发生事故U。如果车辆100急剧地加速或制动,则车辆100也可能在正常行驶运行中执行突然的俯仰运动,从而使得仅基于第一车辆数据DF1获知车辆100发生事故U可能变得困难。通过考虑至少一个车辆信号SF,使得可以提高获知发生事故U的可靠性。例如,当第一车辆信号SF1表示发动机136的恒定的空转转速时,则无法由车辆100的期望的加速度引起突然的俯仰运动。此外,在获知突然的俯仰运动之后,可能会缺少发动机136的发动机信号,由此会检查车辆100发生事故U的合理性。
车辆100的第二车辆子系统132.2包括散热器140和冷却剂传感器142,尤其是冷却剂液位传感器,其提供冷却剂信号SKM。散热器140可以例如被构造成用于冷却车辆100的发动机136。冷却剂传感器142被构造成用于提供第二车辆信号SF2,该第二车辆信号表示散热器140的冷却剂液位。优选地,冷却剂构造为冷却水,并且冷却剂传感器142是冷却水传感器143。类似于第一车辆信号SF1地,第二车辆信号SF2也提供给车辆100的主控制单元130,并借助车辆数据总线139提供给控制单元2。但是也可以设置的是,冷却剂传感器142将第二车辆信号SF2直接提供给控制单元2。通常,车辆100的散热器140布置在车辆前部144上,因此,当车辆100沿行驶方向R行驶时,实现了冷却剂的有效冷却。由于散热器140位于车辆前部144上,因此当车辆100受到正面碰撞时,散热器140经常被损坏。由于散热器140损坏,冷却剂往往会逸出,由此使得散热器140中的冷却剂的冷却剂液位下降。
优选地,控制单元2被构造成用于确定车辆信号SF是否满足预先限定的信号标准SK。例如,预先限定的信号标准SK可以是冷却剂液位的下降低于预先限定的极限值GW和/或冷却剂液位下降的速率。如果例如由于事故U而获知车辆100的转动位置LD发生突然变化,则当获知转动位置LD的变化之后冷却基液位下降到极限值GW以下时,则可以通过控制单元2核实对事故U的获知。控制单元2优选被构造成用于将在转动位置LD的变化之后冷却剂液位跟着下降用作用于获知车辆100发生事故U的标准。以类似的方式,对事故U的获知也可以通过发动机136的发动机油压的下降来证实。为此,发动机传感器138优选是油压传感器141,其中,由发动机传感器138提供的为油压信号SOP的第一车辆信号SF1表示发动机136的油压。应理解,车辆子系统132还可以具有表示车辆子系统132的不同和/或相同参数的多个传感器。
为了转向,车辆100具有第三车辆子系统132.3。在此,借助调节前车轮112.1、112.2来进行车辆100的转向,前车轮限定了车辆100的行驶方向R。为了检测车辆100的当前转向定位,第三车辆子系统132.3具有两个转向传感器146.1、146.2,它们布置在前车轮112.1、111.2上。然而,也可以设置的是,第三车辆子系统132.3仅具有一个转向传感器146或两个以上的转向传感器146。此外,转向传感器146也可以布置在第三车辆子系统132.3的其他定位处并且/或者检测转向预给定参数。例如,转向传感器146可以检测方向盘(未示出)的转向角度。转向传感器146.1、146.2提供表示车辆100的转向位置的第三车辆信号SF3。在获知车辆100发生事故U的情况下,通过控制单元2可以考虑表示转向位置的第三车辆信号SF3。为此,在第三实施例中,借助车辆数据总线139将第三车辆信号SF3提供给控制单元2。例如,可以考虑第三车辆信号SF3,以便获知由控制单元2基于由传感器单元4提供的车辆数据DF1而获知的车辆的偏航运动是否是由驾驶员预给定的转向运动引起的。如果控制单元2获知车辆100发生偏航运动并且在考虑到第三车辆信号SF3的情况下没有执行转向运动,则可以由此推断出车辆100发生事故U。优选地,将车辆信号SF(优选是第三车辆信号SF3)表示车辆100没有进行转向运动而控制单元2获知了车辆100发生了偏航运动作为用于获知车辆100发生事故U的标准。因此,提高了获知车辆100发生事故U的准确性。
优选地,车辆信号SF可以表示车辆子系统132发生故障。特别优选地,控制单元2被构造成用于获知车辆子系统132中存在故障并且/或者缺少车辆信号SF。缺少车辆信号通常被称为超时。由于车辆100发生事故U,使得一个或多个车辆子系统132通常被损坏,从而缺少了车辆信号SF并且/或者表示损坏的车辆子系统132中出现故障。因此,控制单元2可以优选地被构造成用于将缺少一个或多个车辆信号SF作为用于获知车辆100发生事故U的标准。优选地,车辆信号SF也可以是车辆100的供电电压信号SV。优选地,控制单元2被构造成用于基于车辆100的供电电压来获知车辆100的一个或多个车辆子系统132是否具有故障。
第四车辆子系统132.4可以是车轮转速传感器148,其中,第四车辆信号SF4表示车辆100的至少一个车轮112.1、112.2、118.1、118.2、118.3、118.4的车轮转速。优选地,控制单元2被构造成用于基于第四车辆信号SF4获知车辆100的车轮112.1、112.2、118.1、118.2、118.3、118.4是否静止不动。控制单元特别优选地被构造成用于当第一车辆数据DF1表示车辆100的转动位置LD发生变化并且车辆100的车轮112.1、112.2、118.1、118.2、118.3、118.4静止不动时,获知车辆100发生事故U。如果在车辆100的车轮112.1、112.2、118.1、118.2、118.3、118.4静止不动期间获知了车辆100的转动位置LD发生变化,则这表明车辆100发生了事故U,这是因为车辆100的转动位置LD的变化可能不是由车辆100本身引起的。
此外优选地,控制单元2可以被构造成用于只有当车辆100的车轮112.1、112.2、118.1、118.2、118.3、118.4静止不动时才使车辆100的驻车制动器124置于制动位置BS中。通过这样的优选的设计方案可以确保在发生事故U期间不接入驻车制动器124。由此防止了车辆安全系统1主动干预到事故发生中。如果在车辆100的车轮112.1、112.2、118.1、118.2、118.3、118.4转动期间接入了驻车制动器124,则可能引起无法预料的不利。例如,由于抱死的车轮112.1、112.2、118.1、118.2、118.3、118.4,使得车辆100的运动状态可能变得不稳定或车辆100可能滚翻。
第五车辆子系统132.5在此是联接力传感器150,该联接力传感器150提供了表示联接力(未示出)的第五车辆信号SF5。联接力优选被施加在车辆的挂车接合器152上。如果车辆100发生事故U,则第五车辆信号SF5可以表示作用在挂车接合器152上的联接力,该联接力在正常行驶运行中不发生。优选地,可以将由车辆信号SF(优选地第五车辆信号SF5)表示的联接力超过极限值GW用作用于获知控制单元2的车辆100发生事故U的标准。因此,可以通过由联接力传感器150提供的车辆信号SF5来改善对车辆100发生事故U的获知。例如,如果挂车300在事故U期间倾翻,则发生很大的联接力和/或联接力变化。此外,例如由于阻尼效应,使得当另外的辆车撞到挂车300上时,车辆100的转动位置LD的变化可能不太明显。因此,考虑表示联接力的第五车辆信号SF5使得在获知到这种事故时可以提高可靠性。尤其地,表示联接力的第五车辆信号SF5和表示发动机136的发动机信号的第一车辆信号SF1可以组合使用以用于获知车辆100发生事故U。例如,如果第一车辆数据DF1表示强烈的俯仰运动,而第五车辆信号SF5表示联接力,而第一车辆信号SF1表示没有发动机136的发动机力矩,则这指示了发生事故U。表示联接力的车辆信号SF也可以被称为联接力信号SKK。
如图3清楚所示,第六车辆子系统132.6可以具有弯曲角度传感器154,该弯曲角度传感器154提供第六车辆信号SF6。因此,第六车辆子系统132.6也可以被称为弯折角度系统。第六车辆信号SF6优选表示在车辆100的纵向轴线AL与挂车300的纵向轴线ALA之间形成的弯折角度δ。控制单元2被构造成用于在考虑弯折角度δ的情况下获知车辆100是否卷入了事故U中。特别优选地,在考虑弯折角度δ的变化率的情况下实现获知发生事故U。例如,车辆100和/或挂车300发生侧面碰撞会导致弯折角度δ非常强烈的变化和/或弯折角度δ在很短的时间内有非常大的变化率,这在无事故的行驶运行中不会发生。表示弯折角度的车辆信号SF也可以被称为弯折角度信号SKW。
优选地,第七车辆子系统132.7具有至少一个加速度传感器155,该加速度传感器提供第七车辆信号SF7。在此,加速度传感器155被集成到中央的主控制单元130中。但是也可以设置的是,加速度传感器155单独实施并且提供第七车辆信号SF7。优选地,第七车辆信号表示车辆100的纵向加速度和/或横向加速度。由于车辆100发生事故除了转动位置LD变化之外也伴随有车辆100的纵向或横向加速度的变化,因此第七车辆信号SF7可以用于获知车辆100发生事故U。此外,第八车辆信号SF8可以是环境传感器157的信号。环境传感器157优选被构造为相机、超声传感器、雷达和/或激光雷达传感器。
特别优选地,控制单元2被构造成用于基于车辆数据DF1和至少两个车辆信号SF执行对事故U的获知。优选地,其中一个车辆信号SF(优选是第六车辆信号SF6)表示弯折角度δ,并且另外的车辆信号SF(优选是第四车辆信号SF4)表示车辆100的转向运动。优选地,可以将表示弯折角度δ的第六车辆信号SF6超过第一极限值GW并且表示车辆100的转向运动的第四车辆信号SF4低于为给其所配属的第二极限值GW2作为用于获知车辆100发生事故U的标准。因此,可以通过第四车辆信号SF4和第六车辆信号SF6以优选的方式检查基于第一车辆数据DF1对车辆100发生事故U的获知的合理性。也可以设置的是,当车辆信号SF满足信号标准SK时,则即使在第一车辆数据DF1的极限值GW较低时也可以通过控制单元2获知车辆100发生事故U。此外可以设置的是,只有当至少一个车辆信号SF满足预先限定的信号标准SK时,才获知车辆100发生事故U。
图4清楚示出了在发生事故U时利用车辆安全系统1保障车辆100、尤其是商用车102安全的方法400的优选的实施方式的顺序。在第一步骤S1中,借助控制单元4检查第一车辆数据DF1,然后,在第二步骤S2中将该第一车辆数据提供给控制单元2上。然后,控制单元2在使用第一车辆数据DF1的情况下获知车辆100是否卷入到事故U中(步骤S3)。当控制单元2获知车辆100发生事故U时,则通过控制单元2将车辆100的驻车制动器24置于制动位置BS中(步骤S4)。优选地,控制单元2将安全驻车制动信号SSFB提供给制动系统104的中央的制动控制单元126,以用于使驻车制动器24置于制动位置BS中。
步骤S3优选也可以具有分步骤S3.1、S3.2、S3.3(图5)。在第一分步骤S 3.1中,控制单元2基于第一车辆数据DF1获知车辆100围绕其纵向轴线AL、横向轴线AQ和/或纵向轴线AH的转动加速度BD的值WD。在第二分步骤S3.2中,将所获知的转动加速度BD的值WD与预先限定的极限值GW进行比较。优选地,预先限定的极限值GW被预先存储在控制单元2的存储器10中。当转动加速度BD的值WD超过预先限定的极限值GW时,则控制单元2获知车辆100卷入事故U中(分步骤S3.3)。
在方法400的替选或补充的实施方式中,步骤S3包括分步骤S3.4、S.3.5和S3.6(图6)。在第四分步骤S3.4中,控制单元2基于第一车辆数据DF1获知车辆100相对于方位固定的惯性系统的绝对位置。然后在第五分步骤S3.5中,控制单元2获知所获知的车辆100的绝对位置是否在车辆100的预先限定的目标位置区域内。随后,当该位置不在目标位置区域内中,则控制单元2确定车辆100发生事故U(分步骤S3.6)。但是也可以设置的是,当所获知的车辆104的绝对位置在预先限定的时间段内不在目标位置区域内时,则控制单元2获知车辆100发生事故U,该预先限定的时间段优选预先存储在存储器10中。
再次参考方法400的第一实施例地,分步骤S3.1优选具有多个子步骤S3.1.1、S3.1.2、S3.1.3、S3.1.4、S3.1.5(图7)。子步骤S3.1.1、S3.1.2、S3.1.3、S3.1.4、S3.1.5描述了通过控制单元2基于由车轴负载传感器8提供的第一车辆数据DF1来获知车辆100的转动加速度BD的值WD。车轴负载传感器8优选是传感器单元(4)的车轴负载传感器(8)。但是也可以设置的是,传感器单元4能与外部的轴负载传感器8连接,以用于接收表示车辆100的车轴负载分布ALV的车轴负载数据DAL。在第一子步骤S 3.1.1中,控制单元2基于由车轴负载传感器8提供的车辆数据DF1来获知在第一时间点t1时的车辆100的第一车轴负载分布ALV1。在第二子步骤S3.1.2中,控制单元2基于由车轴负载传感器8提供的车辆数据DF1获知在第二时间点t2时的车辆100的第二车轴负载分布ALV2。在第三子步骤S3.1.3中,控制单元2根据在时间点t1时的第一车轴负载分布ALV1和在时间t2时的第二车轴负载分布ALV2获知车轴负载变化ΔALV。在获知了车轴负载变化ΔALV(S3.1.3)之后,控制单元2获知在第一时间点t1与第二时间点t2之间经过的时间间隔Δt,并且基于车轴负载变化ΔALV和时间间隔Δt,获知车轴负载变化率ALR(子步骤S3.1.4)。然后在第五子步骤S3.1.5中,控制单元2基于车轴负载变化率ALR获知车辆100的转动加速度BD。优选地,此外还在使用预先存储在存储器10中的第二车辆数据DF2的情况下来对车辆100的转动加速度BD进行获知。例如,第二车辆数据DF2可以是车轴负载传感器8的信号变化曲线,其存储在存储器10中。此外,第二车辆数据DF2也可以是关于车辆100的信息,例如车辆质量、轮距或车辆尺寸的信息。应理解,通过控制单元2也可以基于由转动率传感器6提供的第一车辆数据DF1来进行对车辆100的转动加速度BD的值的获知。
根据图8中所示的方法400的第三实施例,该方法是方法400的第一或第二实施例的改进方案,该方法可以具有在获知车辆100发生事故U之前通过控制单元2执行的另外的步骤S5、S6。在优选与步骤S1和/或S2并行执行的第五步骤S5中,提供了车辆子系统132的至少一个车辆信号SF。在第六步骤S6中,控制单元2将车辆信号SF与预先确定的的信号标准SK进行比较。预先确定的信号标准SK优选在此预先存储在存储器10中。在该实施例中,通过控制单元2在使用车辆数据DF1的情况下获知车辆发生事故U的步骤包括分步骤S3.4。在分步骤S3.4中,控制单元2不仅基于车辆数据DF1而且还基于车辆信号SF1与信号标准SK的比较来获知车辆100发生事故U。优选地,分步骤S3.4也可以具有基于车辆数据DF1以及将车辆信号SF的时间变化曲线与预先确定的信号标准SK进行比较来获知车辆100发生事故U。应理解,此外,步骤S3也可以具有分步骤S3.1和S3.2。
根据第四实施例,该方法还具有步骤S7和S8。在第七步骤S7中,当获知车辆100发生事故U时,由车辆安全系统1触发紧急呼叫N。第八步骤S8具有释放步骤S8.1、S8.2和S8.3。在第一释放步骤S 8.1中,操纵车辆100的加速踏板132。对加速踏板的操纵(S 8.1)做出响应地,提供行驶信号SD。在第三释放步骤S8.3中,控制单元2松开驻车制动器24。优选地,控制单元2向中央的制动控制单元126提供松开信号SL,以用于松开驻车制动器24。应理解,步骤S7和S8可以彼此独立地执行。此外,根据第三实施例的方法优选也可以具有步骤S7和S8。
优选地,控制单元2是车辆100的主控制单元130、制动控制单元126和/或另外的控制单元。此外,控制单元2还可以优选是挂车控制单元和/或挂车制动控制单元。优选地,挂车300的挂车信号也可以用于获知车辆100发生事故U,这特别优选地借助挂车控制单元来提供。此外,挂车300还可以具有紧急松开装置134。由挂车300的传感器提供的车辆信号可以用于真实性检查或代替车辆数据使用。特别是当例如牵引车被完全破坏时,则挂车300因此可以用作冗余并在那里接入制动。
附图标记列表
1 车辆安全系统
2 控制单元
4 传感器单元
6 转动率传感器
8、8.1、8.2、8.3、8.4、8.5、8.6 车轴负载传感器
10 存储器
11 紧急呼叫系统
100 车辆
102 商用车
104 制动系统
106 能电控制的气动的制动系统
108 前车轴制动回路
110 后车轴制动电路
112.1、112.2 前车轮
114、114.1、114.2 前车轴行车制动缸
116 前车轴调制器
118.1、118.2、118.3、118.4 后车轮
120 后车轴调制器
122、122.1、122.2、122.3、122.4 后车轴行车制动缸
123 行车制动器
124.1、124.2、124.3、124.4 驻车制动缸
124 驻车制动器
126 中央的制动控制单元
128 制动值发送器
130 主控制单元
131 车顶
132、132.1、132.2、132.3、 车辆子系统
132.4、132.5、132.6、132.7
133 加速踏板
134 紧急松开装置
136 发动机
137 发动机控制器
138 发动机传感器
139 车辆数据总线
140 散热器
141 油压传感器
142 冷却剂传感器
143 冷却水传感器
144 辆车前部
146、146.1、146.2 转向传感器
148 车轮转速传感器
150 联接力传感器
152 挂车接合器
154 弯折角度传感器
155 加速度传感器
157 环境传感器
200 路面
300 挂车
400 方法
AH 车辆的竖轴线
AH1 处于起始定位中的竖轴线
AH2 处于最终定位中的竖轴线
AL 车辆的纵向轴线
AQ 车辆的横向轴线
AQ1 处于起始定位中的横向轴线
AQ2 处于最终定位中的横向轴线
ALR 车轴负载变化率
ALV1 第一车轴负载分布
ALV2 第二车轴负载分布
ΔALV 车轴负载变化
BS 制动位置
BD 转动加速度
DAL 车轴负载数据
DF1 第一辆车数据
DF2 第二车辆数据
FS 行驶位置
GW 极限值
GW2 第二极限值
HA1、HA2 车辆的后车轴
LD 转动位置
N 紧急呼叫
SP 重心
SP1 处于起始定位的车辆的重心
SP2 处于最终定位的车辆的重心
SB 制动预给定参数
SBF 驻车制动信号
SBH 后车轴制动信号
SBV 前车轴制动信号
SF、SF1、SF2、SF3、SF4、 车辆信号
SF5、SF6、SF7、SF8
SK 信号标准
SKK 联接力信号
SKM 冷却剂信号
SKW 弯折角度信号
SNL 紧急松开信号
SOP 油压信号
SSFB 安全驻车制动信号
SV 供电电压信号
t1 第一时间点
t2 第二时间点
Δt 时间间隔
U 事故
VA 车辆的前车轴
WD 转动加速度的值
ZV 时间变化曲线
α 偏航角度
β 俯仰角度
γ 侧倾角度
δ 弯折角度
- 车辆安全系统的子组件、车辆安全系统、车辆安全装置和制造车辆安全系统的子组件的方法
- 用于车辆安全系统的自适应的能展开的约束元件、气囊模块和具有这种约束元件的车辆安全系统以及鳍条效应在自适应约束元件中的应用