一种基于垂直双台面结构的多工位数字光刻装置和方法
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及一种基于垂直双台面结构的多工位数字光刻装置和方法,属于光刻系统技术领域。
背景技术
基于激光直写的数字光刻技术,近年来迅速发展,主要用于PCB领域的直写曝光。为了最大化光刻系统的产出,在原有单台面结构的基础上,出现了双台面结构的光刻系统,将上下板、对位、曝光,串行的工作流程使用两个工作台轮流运作的方式,使部分流程并行,极大提升了设备的稼动率。双台面设备又分为左右双台面和上下双台面;左右双面台即左右布局的双台面结构,多应用于快速样板、拼板、软板等的曝光;上下双台面即垂直布局的双台面结构,因其上下板的操作与单台面基本一致,因此更能够适用于PCB直写曝光的自动化生产。
垂直布局的双台面结构,因在垂直方向上设置两个工作台,受空间结构限制,使两个台面各自不能完全独立的运作,系统效率较低。例如专利CN1578595A中提出的双台面曝光系统,在给定的条件下,相比单台面结构有明显的产出效率提升;但实际工作中,针对不同客户需求的生产模式,需要有不同的光刻方法流程,才能使垂直双台面结构的光刻系统发挥最佳的性能。
现有技术中基于垂直双台面结构的数字光刻系统中,因曝光工作面、对位工作面处于同一平面,为了提升工作效率,需要在曝光工位、对位工位之间预留足够的水平工作空间,即在对位系统和曝光系统之间设置过渡区,这会增加设备的尺寸,并且提高成本。但若在对位系统和曝光系统之间不设置过渡区,则两个工位不能同时独立运作,会导致系统效率降低,同时有降低系统稳定性的风险。
进一步,在具有更高解析精度的光刻装置中,曝光系统中个体光路需要更小倍率及更小视场,想要实现一次性的整板曝光,则曝光系统需要在扫描方向布置多排、交错分布的个体光路,这会大幅增加曝光系统的调试难度和稳定性,同时可能会出现整板图形严重变形的问题。为了实现较佳的曝光效果及设备性价比,通常设置较合理的光路数及排列数,并使工作台承载被曝光基板多次往复运动,以实现整板曝光;这种情况下,曝光工位的工作台的往复运动会影响另一工作台在对位工位上的动作执行,从而影响系统的整体效率。
此外,为了提升光刻系统的对位精度,通常将需要曝光的基板进行分区,例如,分为4至16个区域,且每个区域均采用多点(一般四个点)进行独立对位。而常规的对位系统中,一般包含2-4个对位相机,在需要分区、多点对位时,每个对位相机需要反复抓取多个对位点,从而导致工作台需要多次启动及停止,严重影响对位效率。基于上述问题,专利CN108710266B中提出了一种触发式对位方式,避免了工作台在多点对位时的多次启动及停止,减少了对位时间,然而目前尚没有将该触发式对位方式应用于垂直双台面结构的光刻系统中的技术方案。
发明内容
为了解决目前存在的上述问题,本发明提供一种基于垂直双台面结构的多工位数字光刻装置和方法。
本发明提供一种基于垂直双台面结构的多工位数字光刻装置和方法,所述技术方案如下:
一种基于垂直双台面结构的多工位数字光刻装置,所述装置包括:垂直双台面结构,对位系统,曝光系统,龙门结构,及支撑结构;其中,垂直双台面结构包括台面一和台面二,所述台面一由设置在导轨上的Y1轴和台面一Z轴支撑,所述台面二由设置在导轨上的Y2轴和台面二Z轴支撑,所述导轨和所述龙门结构设置在支撑结构上;所述台面一和所述台面二分别在台面一Z轴和台面二Z轴的作用下在Z方向移动,并且可以分别在Y1轴和Y2轴的作用下沿导轨在Y方向移动;所述垂直双台面结构中,所述台面一和所述台面二能够形成两个或三个垂直工位。
根据本发明的光刻装置,可选地,当所述台面一和所述台面二形成两个垂直工位时,所述对位系统和所述曝光系统之间设置过渡区,并且所述过渡区的长度能够不小于所述双台面结构中的任意一个台面长度;当所述台面一和所述台面二形成三个垂直工位时,所述对位系统和所述曝光系统之间不设置过渡区。
根据本发明的光刻装置,可选地,所述龙门结构包括龙门结构一和龙门结构二,所述对位系统设置在龙门结构一上,所述对位系统包括对位单元和对位X轴,所述对位X轴设置于所述龙门结构一的导轨上,所述对位单元能够在对位X轴的作用下沿导轨在X方向移动;
根据本发明的光刻装置,可选地,所述曝光系统设置在龙门结构二上,并且包括曝光单元和曝光X轴,所述曝光X轴设置于龙门结构二的导轨上;所述曝光单元能够在曝光X轴的作用下沿导轨在X方向移动。
根据本发明的光刻装置,可选地,所述对位系统还包括对位Z轴,所述对位单元设置于对位Z轴上,所述对位Z轴设置于对位X轴上,所述对位单元能够在对位Z轴的作用下沿Z轴方向移动,且能够在对位X轴的作用下沿X方向移动;
根据本发明的光刻装置,可选地,所述曝光系统还包括曝光Z轴,所述曝光单元设置于曝光Z轴上,曝光Z轴设置于曝光X轴上,所述曝光单元能够在曝光Z轴的作用下沿Z轴方向移动,且能够在曝光X轴的作用下沿X方向移动。
本发明提供一种基于垂直双台面结构的垂直多工位数字光刻方法,所述垂直双台面结构包括垂直设置的台面一和台面二,用于承载待曝光基板,所述台面一和所述台面二分别在台面一Z轴和台面二Z轴的作用下在Z方向移动,并形成三个垂直工位,分别为在Z方向上从上到下依次分布的垂直工位1、垂直工位2和垂直工位3;并且所述台面一和所述台面二分别在Y1轴和Y2轴的作用下沿导轨在Y方向运动;用于对所述待曝光基板进行对位的对位系统和用于对所述曝光基板进行曝光的曝光系统之间不设置过渡区;所述方法包括如下步骤:
步骤一:所述台面一在上板区的垂直工位1处上板,运动至垂直工位3,由对位系统开始对位;同时所述台面二运动至垂直工位1,在上板区进行上板操作;
步骤二:所述台面一所承载的待曝光基板完成对位后,运动至垂直工位2,由曝光系统开始曝光;同时所述台面二运动至垂直工位3,由所述对位系统开始对位;
步骤三:所述台面一所承载的待曝光基板完成曝光后,运动至下板区进行下板,再运动至上板区进行上板;同时所述台面二的待曝光基板在完成对位后,运动至垂直工位2,由所述曝光系统开始曝光;
步骤四:所述台面一完成上板后,运动至垂直工位3,由对位系统开始对位;同时所述台面二继续曝光;
步骤五:所述台面一所承载的待曝光基板完成对位后,运动至垂直工位2,由曝光系统开始曝光;同时所述台面二所承载的待曝光基板完成曝光后,运动到垂直工位1完成下板和上板操作,并运动至垂直工位3,由所述对位系统开始对位;
步骤六:重复所述步骤三至所述步骤五至完成批次待曝光基板的曝光。
根据本发明的上述光刻方法,可选地,所述方法在在所述台面一进行曝光的同时,所述台面二进行对位操作;所述台面一在进行往复运动曝光或一次扫描曝光时,会出现所述台面一对所述对位系统完全无遮挡的时刻,此时所述台面二以较快速度完成一次具有分区对位需求的触发对位,或完成不需要分区需求的整板触发对位;所述台面一在所述曝光系统下方的每次往复运动,所述台面二均可完成一次分区对位需求的触发对位,直到完成整板对位。在一个实施例中,基板的生产长度在500mm-800mm范围,曝光速度在500mm/s以下,且曝光系统每次往复运动前的准备时间大概在0.3s(准备时间为曝光系统在X方向的步进运动);对位的运动速度一般根据对位精度的需求可设置在700mm/s以上;由此,即使是800mm长度的基板,也可在任意一台面进行曝光时,出现的对对位系统完全无遮挡的时刻,另一台面完成一次触发对位。
根据本发明的上述光刻方法,可选地,在所述台面二进行曝光的同时,所述台面一进行对位操作的过程与上述过程类似。
本发明还提供一种基于垂直双台面结构的垂直双工位数字光刻方法,所述垂直双台面结构包括垂直设置的台面一和台面二,用于承载待曝光基板,所述台面一和所述台面二分别在台面一Z轴和台面二Z轴的作用下在Z方向移动,并形成两个垂直工位,分别为在Z方向上从上到下依次分布的垂直工位1和垂直工位2;并且所述台面一和所述台面二分别在Y1轴和Y2轴的作用下沿导轨在Y方向运动;用于对所述待曝光基板进行对位的对位系统和用于对所述待曝光基板进行曝光的曝光系统之间设置过渡区,所述过渡区的长度不小于所述双台面结构中的任意一个台面长度;所述方法包括如下步骤:
步骤一:所述台面一在上板区的垂直工位1处上板,沿Y方向移动至对位系统下方进行对位;
步骤二:所述台面一所承载的待曝光基板完成对位后,运动至垂直工位2曝光系统下方进行曝光;同时,所述台面二运动至垂直工位1,在上板区的垂直工位1处上板,沿Y方向移动至对位系统下方进行对位;
步骤三:所述台面一所承载的待曝光基板完成曝光后,运动至下板区进行下板;同时所述台面二所承载的待曝光基板完成对位后,运动至垂直工位2的曝光系统下方进行曝光;
步骤四:所述台面一完成下板后,运动至上板区的垂直工位1处上板,沿Y方向移动至对位系统下方进行对位;同时所述台面二所承载基板在完成曝光后,运动至下板区完成下板;
步骤五:重复步骤二至步骤四至完成批次待曝光基板的曝光。
根据本发明的上述光刻方法,可选地,所述对位系统采用触发式对位方式进行对位,所述台面一或台面二在对位系统区域以匀速运动进行对位,并且所述对位系统能够在X方向移动,对有多分区对位需求的待曝光基板进行往复运动触发对位。
根据本发明的上述光刻方法,可选地,所述台面一或台面二根据对位信息,在所述垂直工位2的曝光系统区域以往复匀速运动进行曝光;并且,在每次往复运动之前,具有多个光路组成的曝光系统根据提前设置好的扫描宽度进行X方向步进运动,以配合完成所述待曝光基板的整板图形曝光。
根据本发明的上述光刻方法,可选地,所述台面一或台面二在对位系统区域以匀速运动进行对位,并且所述对位系统能够在X方向移动,对有多分区对位需求的待曝光基板进行往复运动触发对位;
根据本发明的上述光刻方法,可选地,所述台面一或台面二根据对位信息,在所述垂直工位2的曝光系统区域以往复匀速运动进行曝光,并且,在每次往复运动之前,具有多个光路组成的曝光系统根据提前设置好的扫描宽度进行X方向步进运动,以配合完成所述待曝光基板的整板图形曝光。
根据本发明的上述光刻方法,可选地,所述台面一和所述台面二以匀速运动1经过所述对位系统进行对位,并且以匀速运动2经过所述曝光系统进行曝光;其中,所述匀速运动1和所述匀速运动2可以是相同速度,也可以是不同速度。
根据本发明的光刻装置及方法,可选地,所述下板区和上板区设置在同一位置。
在一种实施方式中,本发明还提供一种基于垂直双台面结构的多工位数字光刻方法,所述垂直双台面结构包括垂直设置的台面一和台面二,用于承载待曝光基板,所述台面一和所述台面二分别在台面一Z轴和台面二Z轴的作用下在Z方向移动,并形成两个垂直工位,分别为在Z方向上从上到下依次分布的垂直工位1和垂直工位2;并且所述台面一和所述台面二分别在Y1轴和Y2轴的作用下沿导轨在Y方向运动;用于对所述待曝光基板进行对位的对位系统和用于对所述待曝光基板进行曝光的曝光系统之间设置过渡区,所述过渡区的长度不小于所述双台面结构中的任意一个台面长度;所述方法包括如下步骤:
步骤一:所述台面一在上板区的垂直工位1处上板后,沿Y方向移动至对位系统下方进行对位,所述对位系统对基板进行触发对位;
步骤二:所述台面一所承载的待曝光基板完成触发对位后,沿Y方向移动至曝光系统下方进行曝光;同时,所述台面二运动至垂直工位1,在上板区的垂直工位1处上板;
步骤三:所述台面一所承载的待曝光基板完成曝光后,运动至下板区进行下板,然后运动至垂直工位2,并快速返回至上板区,或不进行下板操作,在运动至垂直工位2后,快速返回至上板区;同时所述台面二沿Y方向移动至对位系统下方完成触发对位后,沿Y方向移动至曝光系统下方进行曝光;
步骤四:所述台面一所承载基板返回至上板区后,运动至垂直工位1上板,如果所述台面一未进行下板操作,则先进行下板操作,再进行上板操作,然后沿Y方向移动至对位系统下方进行触发对位;同时所述台面二所承载基板在完成曝光后,运动至下板区进行下板,然后运动至垂直工位2,并快速返回至上板区,或不进行下板操作,在运动至垂直工位2后,快速返回至上板区;
步骤五:重复步骤二至步骤四的流程至完成批次待曝光板件的曝光。
本发明有益效果是:
本发明提供的基于垂直双台面结构的多工位数字光刻装置及方法,通过采用触发对位模式,或使曝光工作面和对位工作面不在同一平面,或使上下板操作面、曝光工作面和对位工作面三者不在同一平面,即在垂直空间上,为两个台面形成多个相互独立的垂直工位,并且可以根据不同的曝光场合,结合不同的曝光流程方法,使本发明的数字光刻装置发挥最佳的生产效率。
本发明提供的光刻装置及方法,适合于使用低剂量成像材料的生产需求,此时曝光速度较快,需要尽量缩短上下板和对位操作,可使工作效率提升10%以上;
本发明提供的光刻装置及方法,基于曝光工作面、对位工作面分别处于不同的垂直工位的垂直双台面结构,适用于有多分区对位需求,或更高解析精度需求,或两者均需要的生产需求,并保证光刻精度。而在这种情况下,传统设备所配备的对位系统,或者曝光系统,或者两者均无法满足在台面一次运动下完成整版的对位要求或扫描要求,且对位系统和曝光系统无法同时工作,会大大降低工作效率。
本发明提供的具备三个垂直工位的垂直双台面数字光刻装置及方法,对位系统与曝光系统间无过渡区,上板区和下板区、曝光工作面、对位工作面分别处于垂直工位1、垂直工位2和垂直工位3;能够适用于有多分区对位需求,或更高解析精度需求,或两者均需要的生产需求,并且在提升工作效率的同时,能够减小设备尺寸,降低设备成本。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
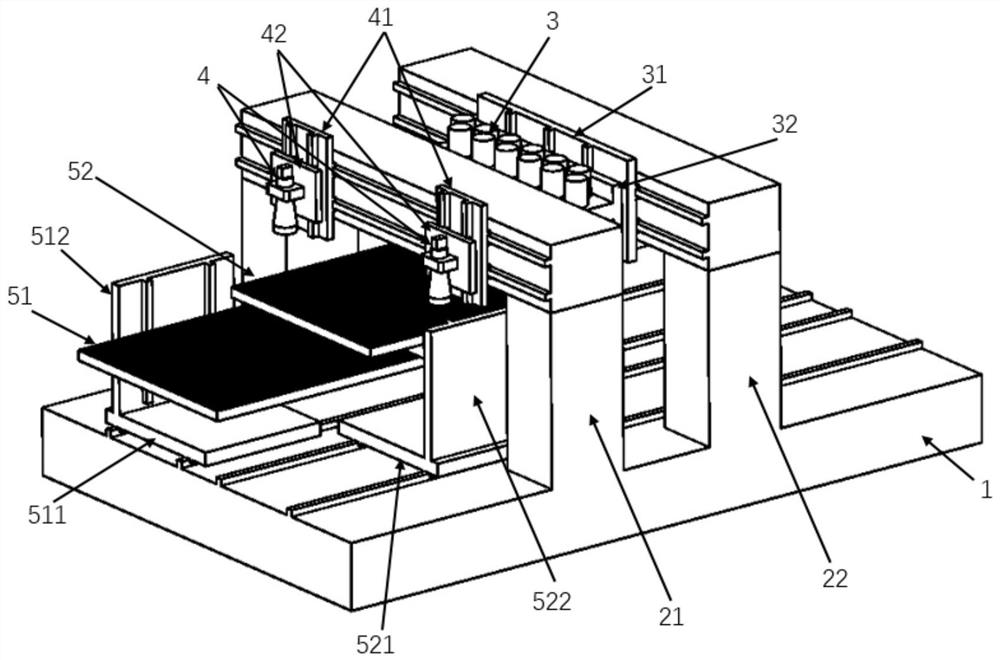
图1(a)是本发明实施例一中不设置过渡区的光刻装置的总体示意图;
图1(b)是本发明实施例一中不设置过渡区的光刻装置的侧向示意图;
图2(a)是本发明实施例一中设置有过渡区的光刻装置的总体示意图;
图2(b)是本发明实施例一中设置有过渡区的光刻装置的侧向体示意图;
图3(a)至图3(l)是本发明实施例二提供的光刻方法的流程示意图;
图4(a)至图4(e)是本发明实施例三提供的光刻方法的流程示意图;
图5(a)至图5(e)是本发明实施例四提供的光刻方法的流程示意图。
附图标记说明:
1.支撑结构、21.龙门结构一、22.龙门结构二、3.曝光系统、31.曝光X轴、32.曝光Z轴、4.对位系统、41.对位X轴、42.对位Z轴、51.台面一、511.Y1轴、512.台面一Z轴、52.台面二、521.Y2轴、522.台面二Z轴
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地详细描述。
实施例一:
本实施例提供一种基于垂直双台面结构的多工位数字光刻装置,图1(a)和图1(b)示出了根据本实施例提供的光刻装置,对位系统4和曝光系统3之间设置有不设置过渡区时的装置总体示意图,图2(a)和图2(b)示出了根据本实施例提供的光刻装置,对位系统4和曝光系统3之间设置有过渡区时的装置总体示意图,其中所述过渡区的长度不小于双台面结构中的任意一个台面长度。
结合图1(a)和图2(a)所示,一种基于垂直双台面结构的多工位数字光刻装置,具体包括:垂直双台面结构,对位系统4,曝光系统3,龙门结构,及支撑结构1;其中,垂直双台面结构包括台面一51和台面二52,所述台面一51由设置在导轨上的Y1轴511和台面一Z轴512支撑,所述台面二52由设置在导轨上的Y2轴521和台面二Z轴522支撑,所述导轨和所述龙门结构设置在支撑结构1上;所述台面一51和所述台面二52分别在台面一Z轴512和台面二Z轴522的作用下在Z方向移动,并且分别在Y1轴511和Y2轴521的作用下沿导轨在Y方向移动;所述垂直双台面结构中,所述台面一51和所述台面二52能够形成两个或三个垂直工位。
根据本实施例的光刻装置,当所述台面一51和所述台面二52形成两个垂直工位时,所述对位系统4和所述曝光系统3之间设置过渡区,并且所述过渡区的长度能够不小于所述双台面结构中的任意一个台面长度;当所述台面一51和所述台面二52形成三个垂直工位时,所述对位系统4和所述曝光系统3之间不设置过渡区。
根据本实施例的光刻装置,所述龙门结构包含龙门结构一21和龙门结构二22,所述对位系统4设置在龙门结构一21上,所述对位系统4包括对位单元和对位X轴41,所述对位X轴41设置于所述龙门结构一21的导轨上,所述对位单元能够在对位X轴41的作用下沿导轨在X方向移动;
根据本实施例的光刻装置,所述曝光系统3设置在龙门结构二22上,并且包括曝光单元和曝光X轴31,所述曝光X轴31设置于龙门结构二22的导轨上;所述曝光单元能够在曝光X轴31的作用下沿导轨在X方向移动。
根据本实施例的光刻装置,所述对位系统4还包括对位Z轴42,所述对位单元设置于对位Z轴42上,所述对位Z轴42设置于对位X轴41上,所述对位单元能够在对位Z轴42的作用下沿Z轴方向移动,且能够在对位X轴41的作用下沿X方向移动;
根据本实施例的光刻装置,所述曝光系统3还包括曝光Z轴32,所述曝光单元设置于曝光Z轴32上,曝光Z轴32设置于曝光X轴31上,所述曝光单元能够在曝光Z轴32的作用下沿Z轴方向移动,且能够在曝光X轴31的作用下沿X方向移动。
根据本实施例,所述上板区和所述下板区能够设置在光刻系统的两侧,用于基板曝光的自动化生产;并且所述上板区和所述下板区还能够设置在同一位置,便于人工操作进行基板曝光,即所述上板区同时可以是下板区。
实施例二
本实施例提供一种基于垂直双台面结构的多工位数字光刻方法,所述垂直双台面结构包括垂直设置的台面一51和台面二52,用于承载待曝光基板,所述台面一51和所述台面二52分别在台面一Z轴512和台面二Z轴522的作用下在Z方向移动,并形成三个垂直工位,分别为在Z方向上从上到下依次分布的垂直工位1、垂直工位2和垂直工位3;并且所述台面一51和所述台面二52分别在Y1轴511和Y2轴521的作用下沿导轨在Y方向左右运动;用于对所述待曝光基板进行对位的对位系统4和用于对所述曝光基板进行曝光的曝光系统3之间不设置过渡区,如图1(a)中所示的结构;并且,参考图3(a)至图3(h)所示,所述方法包括如下步骤:
步骤一:所述台面一51在上板区的垂直工位1处上板,并通过吸附系统固定待曝光基板后,在Y方向移动,退至上板区外,并下降至垂直工位3,由对位系统4开始对位;同时所述台面二52在上升至垂直工位1,在上板区进行上板操作,如图3(a)至图3(c)所示;或者台面二52退至上板区外,台面一51下降至垂直工位3,继而台面二52上升至垂直工位1,在上板区进行上板操作;
步骤二:所述台面一51所承载的待曝光基板完成对位后,在Y方向运动至曝光区域下方,并上升至垂直工位2,由曝光系统3开始曝光;同时所述台面二52下降至垂直工位3,由所述对位系统4开始对位,如图3(d)至图3(g)所示;
步骤三:所述台面一51所承载的待曝光基板完成曝光后,上升到垂直工位1,在Y方向运动至下板区完成下板操作,再运动至上板区的垂直工位1处进行上板操作;同时所述台面二52的待曝光基板在完成对位后,上升至垂直工位2,由所述曝光系统3开始曝光,如图3(h)所示;
步骤四:所述台面一51在上板区的垂直工位1处完成上板后,通过吸附系统固定待曝光基板后,下降至垂直工位3,由对位系统4开始对位;同时所述台面二52继续完成曝光,如图3(i)至图3(j)所示;
步骤五:所述台面一51所承载的待曝光基板完成对位后,上升至垂直工位2,由曝光系统3开始曝光,同时所述台面二52所承载的待曝光基板完成曝光后,上升到垂直工位1,在Y方向运动至下板区完成下板,然后运动至上板区进行上板操作,并下降至垂直工位3,由所述对位系统4开始对位,如图3(k)至图3(l)所示;
步骤六:重复所述步骤三至步骤五的流程至完成批次待曝光基板的曝光。
根据本实施例的光刻方法,所述对位系统4采用触发式对位方式进行对位,所述台面一51在垂直工位3以匀速运动经过对位系统4,并且所述对位系统4能够在X方向移动,对有多分区对位需求的待曝光基板进行往复运动触发对位。
根据本实施例的光刻方法,图3(a)表示台面一51及台面二52分别处于上板区的垂直工位1和垂直工位2处,等待工作流程开启;图3(b)表示流程开始,台面一51在上板区的垂直工位1处上板,并通过吸附系统固定基板后,退至上板区外,同时下降至垂直工位3,准备开始对位流程。台面二52上升至垂直工位1,准备在上板区进行上板操作。
根据本实施例的光刻方法,图3(c)表示台面一51开始在垂直工位3区域以匀速运动经过对位系统4,对有多分区对位需求的基板进行往复运动触发对位,直至抓取完所有分区的对位点,获取对位点坐标。在每次往复运动过程前,具有多个对位相机组成的对位系统4根据提前配置好的分区及对位点信息,在X方向移动,以配合完成所有对位点的抓取。或者台面一51所承载基板不需要分区对位,则以匀速运动1经过对位系统4,进行触发对位,获取对位点坐标。同时台面二52完成上板操作。图3(d)表示台面一51对位完成后,退至对位系统4区域外,运动至曝光区域下方,同时上升至垂直工位2,准备开始曝光。台面二52下降至垂直工位3,准备开始对位。
根据本实施例的光刻方法,图3(e)表示所述台面一51根据对位信息,在所述垂直工位2的区域以往复匀速运动经过曝光系统3,对有更高解析精度要求的基板进行曝光;或者所述台面一51所承载的待曝光基板,不需要更高解析精度要求,则根据对位信息以匀速运动2经过曝光系统3,完成曝光;并且,在所述台面一51每次往复运动之前,具有多个光路组成的曝光系统3根据提前设置好的扫描宽度进行X方向步进运动,以配合完成所述待曝光基板的整板图形曝光。
根据本实施例的光刻方法,图3(f)和图3(g)表示在所述台面一51进行曝光的同时,所述台面二52进行对位操作;由于所述对位系统4与所述曝光系统3间至少有300mm-400mm的水平距离,所述台面一51在进行往复运动曝光或一次扫描曝光时,会出现所述台面一51对所述对位系统4完全无遮挡的时刻,此时所述台面二52以较快速度完成一次具有分区对位需求的触发对位,或完成不需要分区需求的整板触发对位;所述台面一51在所述曝光系统3下方的每次往复运动,所述台面二52均可完成一次分区对位需求的触发对位,直到完成整板对位。
在本实施例中,基板的生产长度在500mm-800mm范围,曝光速度在500mm/s以下,且曝光系统3每次往复运动前的准备时间大概在0.3s(准备时间为曝光系统3在X方向的步进运动);对位的运动速度一般根据对位精度的需求可设置在700mm/s以上;由此,即使是800mm长度的基板,也可在任意一台面进行曝光时,出现对对位系统4完全无遮挡的时刻,另一台面完成一次触发对位。
图3(h)表示台面一51完成曝光后,上升到垂直工位1,并运动到下板区进行下板操作,再运动至上板区的垂直工位1处进行上板操作。同时台面二52在完成对位后,上升至垂直工位2,根据对位信息,在垂直工位2区域以往复匀速运动经过曝光系统3,对有更高解析精度要求的基板进行曝光。在每次往复运动过程前,具有多个光路组成的曝光系统3会根据提前设置好的每条带扫描宽度进行X方向步进运动,以配合完成整版面的图形曝光。或者台面二52所承载基板,不需要更高解析精度要求,则根据对位信息以匀速运动2经过曝光系统3,完成整版图形曝光。
图3(i)和图3(j)表示所述台面一51在装载下一片待曝光基板后,下降至垂直工位3,开始对位;同时所述台面二52继续曝光,执行与图3(f)和图3(g)中所述台面一51进行曝光的同时,所述台面二52进行对位的类似流程。
图3(k)所示为所述台面二52完成曝光后,上升到垂直工位1,并运动到下板区进行下板操作,然后运动到上板区装载下一片待曝光基板,所述台面一51在对位完成后,上升至垂直工位2,根据对位信息,在垂直工位2区域以往复匀速运动经过曝光系统3,对有更高解析精度要求的基板进行曝光;所述台面一51在每次往复运动过程前,具有多个光路组成的曝光系统3会根据提前设置好的扫描宽度进行X方向步进运动,以配合完成整版面的图形曝光;或者台面一51所承载基板,不需要更高解析精度要求,则根据对位信息以匀速运动2经过曝光系统3,完成整版图形曝光。
图3(l)所示为表示所述台面一51继续曝光;所述台面二52在完成装载下一片待曝光基板后,下降至垂直工位3,准备开始对位。
根据本实施例的光刻方法,所述上板区和所述下板区能够设置在光刻系统的两侧,用于基板曝光的自动化生产;并且所述上板区和所述下板区能够设置在光刻系统的同一侧,便于人工操作进行基板曝光。
实施例三
本实施例还提供一种基于垂直双台面结构的双工位数字光刻方法,所述垂直双台面结构包括垂直设置的台面一51和台面二52,用于承载待曝光基板,所述台面一51和所述台面二52分别在台面一Z轴512和台面二Z轴522的作用下在Z方向移动,并形成两个垂直工位,分别为在Z方向上从上到下依次分布的垂直工位1和垂直工位2;并且所述台面一51和所述台面二52分别在Y1轴511和Y2轴521的作用下沿导轨在Y方向左右运动;用于对所述待曝光基板进行对位的对位系统4和用于对所述曝光基板进行曝光的曝光系统3之间设置过渡区,如图2(a)至图2(b)并且所述过渡区的长度不小于所述双台面结构中的任意一个台面长度,并且所述对位系统4和所述曝光系统3均能够在X方向移动;图4(a)至图4(e)所示,为垂直双工位,对位系统4与曝光系统3间的过渡区满足不小于一个台面长度,对位工作面、曝光工作面分别处于垂直工位1和垂直工位2的结构简化流程示意图。
根据本实施例的光刻方法,所述上板区和所述下板区能够设置在光刻系统的两侧,用于基板曝光的自动化生产;并且所述上板区和所述下板区能够设置在光刻系统的同一侧,便于人工操作进行基板曝光。
根据本实施例的基于垂直双台面结构的双工位数字光刻方法,所述方法具体包括如下步骤:
步骤一:所述台面一51在上板区的垂直工位1处上板,并通过吸附系统固定待曝光基板后,在垂直工位1区域以往复匀速运动经过对位系统4,所述对位系统4对有多分区对位需求的基板进行触发对位,直至抓取完所有分区的对位点,获取对位点坐标,如图4(a)所示;
步骤二:所述台面一51所承载的待曝光基板完成分区对位后,下降至垂直工位2,并根据对位坐标,在垂直工位2区域以往复匀速运动经过曝光系统3,对有更高解析精度要求的基板进行曝光;同时,所述台面二52上升至垂直工位1,在上板区的垂直工位1处上板,并通过吸附系统固定待曝光基板后,在垂直工位1区域以往复匀速运动经过对位系统4,对有多分区对位需求的基板进行触发对位,直至抓取完所有分区的对位点,获取对位点坐标,如图4(b)所示;
步骤三:所述台面一51所承载的待曝光基板完成曝光后,在Y方向移动至下板区进行下板,然后快速返回至上板区,或不进行下板操作,快速返回至上板区;同时所述台面二52所承载的待曝光基板完成对位后下降至垂直工位2,或者由垂直工位1区域的过渡区下降至垂直工位2,并根据对位信息,在垂直工位2区域以往复匀速运动经过曝光系统3,对有更高解析精度要求的基板进行曝光,如图4(d)所示,所述台面二52每次往复运动过程前,具有多个光路组成的曝光系统3会根据提前设置好的每条带扫描宽度进行X方向步进运动,以配合完成整版面的图形曝光。所述台面一51曝光期间,所述台面二52如果先完成对位,则在垂直工位1区域的过渡区等待,如图4(c)所示;
步骤四:所述台面一51所承载基板曝光完成并返回至上板区后,上升至垂直工位1进行上板操作;如果所述台面一51未进行下板操作,则先进行下板操作,再进行上板操作,然后在垂直工位1区域以往复匀速运动经过对位系统4,对有多分区对位需求的基板进行触发对位,直至抓取完所有分区的对位点,获取对位点坐标;同时所述台面二52所承载基板在完成曝光后,在Y方向移动至下板区进行下板,然后快速返回至上板区,或不进行下板操作,快速返回至上板区;
步骤五:重复所述步骤二至所述步骤四的流程至完成批次待曝光板件的曝光。
实施例四:
本发明还提供一种基于垂直双台面结构的双工位数字光刻方法,所述垂直双台面结构包括垂直设置的台面一51和台面二52,用于承载待曝光基板,所述台面一51和所述台面二52分别在台面一Z轴512和台面二Z轴522的作用下在Z方向移动,并形成两个垂直工位,分别为在Z方向上从上到下依次分布的垂直工位1和垂直工位2;并且所述台面一51和所述台面二52分别在Y1轴511和Y2轴521的作用下沿导轨在Y方向左右运动;用于对所述待曝光基板进行对位的对位系统4和用于对所述曝光基板进行曝光的曝光系统3之间设置过渡区,如图2(a)至图2(b),并且所述过渡区的长度不小于所述双台面结构中的任意一个台面长度,并且所述对位系统4和所述曝光系统3均能够在X方向移动;
根据本实施例,所述上板区和所述下板区能够设置在光刻系统的两侧,用于基板曝光的自动化生产;并且所述上板区和所述下板区还能够设置在光刻系统的同一侧,便于人工操作进行基板曝光,即所述上板区同时可以是下板区。
进一步,如图5(a)至图5(e)所示为对位系统4采用触发对位,垂直双台面结构形成两个垂直工位,对位系统4与曝光系统3间的过渡区满足不小于一个台面长度,曝光工作面、对位工作面处于同一垂直工位1的结构简化流程示意图。结合图5(a)至图5(e)所示,根据本实施例的光刻方法包括如下步骤:
步骤一:所述台面一51在上板区的垂直工位1处上板,并通过吸附系统固定待曝光基板后,沿Y方向匀速运动至垂直工位1的对位系统4下方进行对位,所述对位系统4对基板进行触发对位,获取对位点坐标,如图5(a)所示;
步骤二:所述台面一51所承载的待曝光基板完成对位后,根据对位坐标,所述台面一51沿Y方向匀速运动至垂直工位1的曝光系统3下方,对基板进行整板曝光;同时,所述台面二52上升至垂直工位1,在上板区的垂直工位1处上板,如图5(b)所示;
步骤三:所述台面一51所承载的待曝光基板完成曝光后,沿Y方向移动至下板区进行下板,然后下降至垂直工位2,并快速返回至上板区,或不进行下板操作,在下降至垂直工位2后,快速返回至上板区;同时所述台面二52如果先于台面一51完成上板,通过吸附系统固定待曝光基板,沿Y方向移动至垂直工位1的对位系统4下方完成触发对位,获取对位点坐标后,沿Y方向移动至垂直工位1的曝光系统3下方进行整板曝光,如图5(c)至图5(d)所示;
步骤四:所述台面一51所承载基板曝光完成并返回至上板区后,上升至垂直工位1上板,如果所述台面一51未进行下板操作,则先进行下板操作,再进行上板操作,然后通过吸附系统固定待曝光基板后,沿Y方向匀速运动至垂直工位1的对位系统4下方进行对位,所述对位系统4对基板进行触发对位,获取对位点坐标;同时所述台面二52所承载基板在完成曝光后,在Y方向移动至下板区进行下板,然后下降至垂直工位2,并快速返回至上板区,或不进行下板操作,在下降至垂直工位2后,快速返回至上板区,如图5(e)所示;
步骤五:重复步骤二至步骤四的流程至完成批次待曝光板件的曝光。
根据本实施例的光刻方法,所述台面一51和所述台面二52以匀速运动1经过所述对位系统4进行触发对位,并且以匀速运动2经过所述曝光系统3进行整板曝光;其中匀速运动1和匀速运动2可以是相同速度,也可以是不同速度,一般与基板需要的对位精度和所采用的曝光材料相关。
本发明实施例中的部分步骤,可以利用软件实现,相应的软件程序可以存储在可读取的存储介质中,如光盘或硬盘等。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于垂直双台面结构的多工位数字光刻装置和方法
- 基于双加工工位的微型腔结构电加工方法及装置