垫圈自动安装机、装配控制方法、装置及存储介质
文献发布时间:2023-06-19 19:38:38
技术领域
本发明涉及转子装配设备技术领域,尤其涉及一种垫圈自动安装机、装配控制方法、装置及存储介质。
背景技术
目前,工业产品对于电机的需求量非常大,随着电机产品产量的不断提高。由于相关技术中,电机转子的垫圈装配过程均由人工完成,容易出现垫圈多装或者漏装的情况,不仅效率低,而且良品率低。因此,如何提高转子垫圈装配效率以及产品良品率成为亟需解决的问题。
发明内容
本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种垫圈自动安装机、装配控制方法、装置及存储介质,能够实现自动装配转子两侧垫圈,提高装配效率,改善产品良品率。
第一方面,本发明实施例提供一种垫圈自动安装机,包括:
垫圈上料机构,包括振动盘、垫圈出料模块、用于运送正向垫圈的第一导轨、用于运送反向垫圈的第二导轨,其中,所述垫圈出料模块包括第一出料槽和第二出料槽,所述振动盘通过所述第一导轨连接至所述第一出料槽,所述振动盘通过所述第二导轨连接至所述第二出料槽,所述第一出料槽的一侧设置有第一光纤传感器,所述第二出料槽的一侧设置第二光纤传感器;
垫圈安装机构,包括双轴移动支架、安装于所述双轴移动支架上的第一运输模块,以及位于所述垫圈出料模块一侧的定位座,所述双轴移动支架包括用于驱动所述第一运输模块纵向移动的第一传动模组,所述第一传动模组由所述定位座向所述垫圈出料模块的方向延伸,所述第一运输模块包括第一转子吸嘴以及与所述第一转子吸嘴并列设置的垫圈吸嘴,所述定位座开设有用于放置转子的定位槽;
转子上料机构,相对设置于所述垫圈安装机构的一侧,所述转子上料机构包括三轴移动支架、安装于所述三轴移动支架的第二运输模块以及用于放置待装配转子的工位收集板,所述三轴移动支架包括用于驱动所述第二运输模块横向移动的横向传动模组,所述横向传动模组由所述工位收集板向所述定位座方向延伸,所述第二运输模块包括第二转子吸嘴;
其中,所述第一转子吸嘴、所述垫圈吸嘴、所述定位槽和所述第二转子吸嘴均设置有用于连接气缸的控制接头以及用于检测气压状态的气压传感器。
根据本发明实施例提供的垫圈自动安装机,至少具有如下有益效果:利用第一导轨和第二导轨将需要装配至转子上下两侧的垫圈分类并分别运送至第一出料槽和第二出料槽,实现垫圈的自动分类和自动上料,减少人工误操作导致垫圈反装的情况出现。同时,第一光纤传感器和第二光纤传感器能够检测垫圈是否已就位,避免垫圈漏装的情况出现。垫圈吸嘴和第一转子吸嘴通过双轴移动支架进行移动,实现自动装配转子上下方两侧的垫圈,而第二转子吸嘴能够通过三轴移动支架将工位收集板上的待装配转子运输至定位座中,实现转子的自动上料。其中,第一转子吸嘴、垫圈吸嘴、定位槽和第二转子吸嘴通过控制接头与气缸连通,从而能够真空吸附转子和垫圈,实现转子和垫圈的运输,同时利用气压传感器能够检测转子和垫圈是否成功吸附,及时反馈运输失败的情况,避免出现漏装的情况。因此,通过垫圈上料机构、垫圈安装机构和转子上料机构相互配合,能够实现自动装配转子上下两侧的垫圈,提高装配效率,同时能够减少垫圈反装、多装或者漏装的情况出现,改善产品良品率。
在上述的垫圈自动安装机,所述第一光纤传感器的所处高度与所述第二光纤传感器的所处高度不同,以检测垫圈方向。
在上述的垫圈自动安装机,所述第一导轨和所述第二导轨均螺旋设置于所述振动盘内且切向延伸至所述垫圈出料模块,所述第一导轨和所述第二导轨分别设置有用于筛选垫圈的导向片,所述导向片均沿导轨边缘设置且向外侧延伸,所述导向片位于所述振动盘内。
在上述的垫圈自动安装机,所述第一运输模块还设置有用于检测垫圈高度的激光传感器,所述激光传感器位于所述第一转子吸嘴内或者所述激光传感器位于所述第一转子吸嘴远离于所述垫圈吸嘴的一侧。
在上述的垫圈自动安装机,所述第二转子吸嘴设置有用于测量转子转轴长度的测距仪,所述工位收集板与所述定位座之间设置有用于回收转轴长度不达标的转子的废料收集板。
在上述的垫圈自动安装机,所述第二转子吸嘴与所述定位座之间还设置有与所述横向传动模组延伸方向相垂直的滑轨模组,所述工位收集板与所述废料收集板并列安装于所述滑轨模组。
在上述的垫圈自动安装机,还包括中间部分留有间隙的双轨传送带,所述双轨传送带位于所述垫圈上料机构远离于所述垫圈安装机构的一侧,且所述双轨传送带位于所述第一传动模组的下方,所述双轨传送带的出口端设置有用于调节间隙宽度的涨紧块。
在上述的垫圈自动安装机,所述双轨传送带的出口端上方还设置有用于防止产品掉落的挡块。
在上述的垫圈自动安装机,所述第一运输模块还安装有第一位移传感器,所述垫圈出料模块还设置有与所述第一位移传感器相匹配的第二位移传感器。
在上述的垫圈自动安装机,还包括用于显示气压状态的显示模块,所述显示模块分别与各个所述气压传感器连接。
第二方面,本发明实施例提供一种装配控制方法,应用于如上述第一方面实施例提供的一种垫圈自动安装机,该装配控制方法包括:
响应于所述第一光纤传感器的第一触发信号,控制所述垫圈吸嘴移动至所述第一出料槽,导通与所述垫圈吸嘴连接的控制接头,直至所述垫圈吸嘴的气压状态满足真空条件;
当所述定位座的气压状态满足真空条件,控制所述垫圈吸嘴移动至所述定位座的上方,并截断与所述垫圈吸嘴连接的控制接头;
响应于所述第二光纤传感器的第二触发信号,控制所述第一转子吸嘴移动至所述定位座的上方,导通与所述第一转子吸嘴连接的控制接头并截断与所述定位座连接的控制接头;
当所述第一转子吸嘴的气压状态满足真空条件,控制所述第一转子吸嘴移动至所述第二出料槽的上方,并控制所述第一转子吸嘴下压以装配转子下方的垫圈。
根据本发明实施例提供的装配控制方法,至少具有如下有益效果:通过第一光纤传感器确定正垫圈成功上料后,利用垫圈吸嘴对第一出料槽的正垫圈进行吸附。通过定位座的气压状态确定定位座内放置有待装配的转子后,将垫圈吸嘴中的正垫圈放置于转子的上侧并套设于转轴。利用第二触发信号确定第二出料槽内的反垫圈就位后,通过第一转子吸嘴将装配有正垫圈的转子从定位座转移至第二出料槽上方,并下压转子,以装配转子下方的垫圈。因此,将装配控制方法应用于垫圈自动安装机能够实现自动对转子上下两侧的垫圈进行装配,提高转子装配效率,无需人工进行装配,避免了人工误操作导致的垫圈反装、漏装或多装的情况出现,改善了产品良品率。
第三方面,本发明实施例提供一种运行控制装置,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上第二方面实施例所述的装配控制方法。
根据本发明实施例提供的运行控制装置,至少具有如下有益效果:通过第一光纤传感器确定正垫圈成功上料后,利用垫圈吸嘴对第一出料槽的正垫圈进行吸附。通过定位座的气压状态确定定位座内放置有待装配的转子后,将垫圈吸嘴中的正垫圈放置于转子的上侧并套设于转轴。利用第二触发信号确定第二出料槽内的反垫圈就位后,通过第一转子吸嘴将装配有正垫圈的转子从定位座转移至第二出料槽上方,并下压转子,以装配转子下方的垫圈。因此,将装配控制方法应用于垫圈自动安装机能够实现自动对转子上下两侧的垫圈进行装配,提高转子装配效率,无需人工进行装配,避免了人工误操作导致的垫圈反装、漏装或多装的情况出现,改善了产品良品率。。
第三方面,本发明实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如上第二方面实施例所述的装配控制方法。
根据本发明实施例提供的计算机可读存储介质,至少具有如下有益效果:通过第一光纤传感器确定正垫圈成功上料后,利用垫圈吸嘴对第一出料槽的正垫圈进行吸附。通过定位座的气压状态确定定位座内放置有待装配的转子后,将垫圈吸嘴中的正垫圈放置于转子的上侧并套设于转轴。利用第二触发信号确定第二出料槽内的反垫圈就位后,通过第一转子吸嘴将装配有正垫圈的转子从定位座转移至第二出料槽上方,并下压转子,以装配转子下方的垫圈。因此,将装配控制方法应用于垫圈自动安装机能够实现自动对转子上下两侧的垫圈进行装配,提高转子装配效率,无需人工进行装配,避免了人工误操作导致的垫圈反装、漏装或多装的情况出现,改善了产品良品率。
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书以及附图中所特别指出的结构来实现和获得。
附图说明
下面结合附图和实施例对本发明进一步地说明;
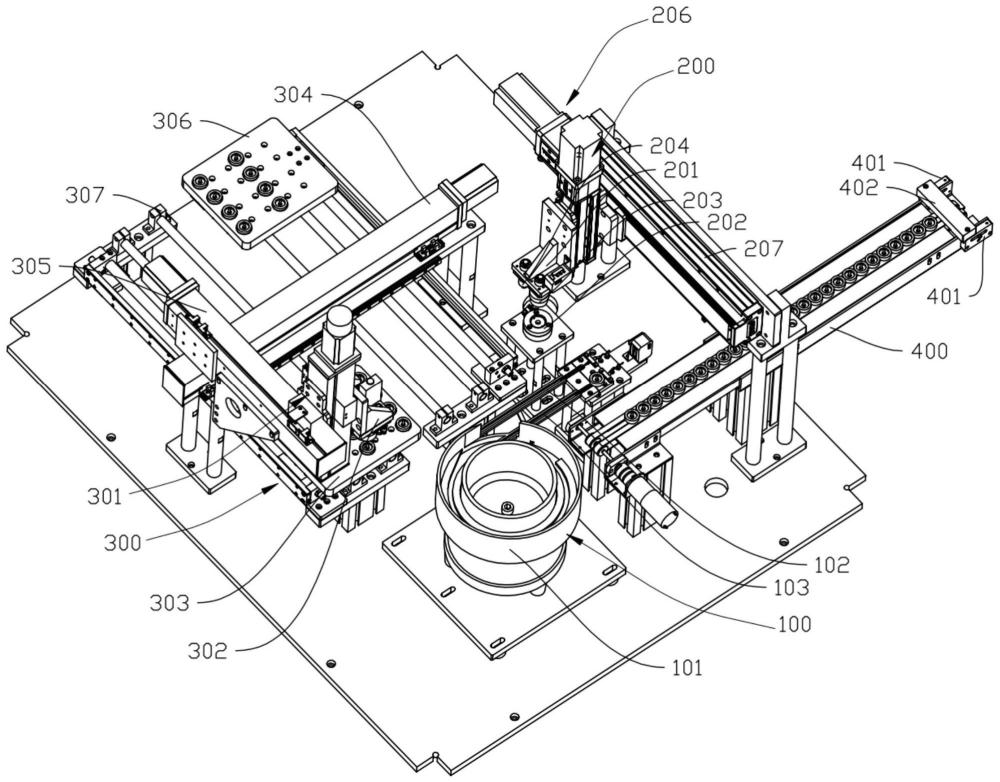
图1是本发明实施例提供的垫圈自动安装机的结构示意图;
图2是本发明实施例提供的垫圈上料机构的部分结构示意图;
图3是本发明实施例提供的垫圈安装机构的部分结构示意图;
图4是本发明实施例提供的转子上料机构的部分结构示意图
图5是本发明实施例提供的装配控制方法的流程图;
图6为本发明实施例提供的一种运行控制装置的结构示意图。
具体实施方式
本部分将详细描述本发明的具体实施例,本发明之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本发明的每个技术特征和整体技术方案,但其不能理解为对本发明保护范围的限制。
应了解,在本发明实施例的描述中,如果有描述到“第一”、“第二”等只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。“至少一个”是指一个或者多个,“多个”是指两个或两个以上。“以下至少一项”及其类似表达,是指的这些项中的任意组合,包括单项或复数项的任意组合。
此外,除非另有明确的规定和限定,术语“连接/相连”应做广义理解,例如,可以是固定连接或活动连接,也可以是可拆卸连接或不可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连。
在本发明实施例的描述中,参考术语“一个实施例/实施方式”、“另一实施例/实施方式”或“某些实施例/实施方式”、“在上述实施例/实施方式”等的描述意指结合实施方式或示例描述的具体特征、结构、材料或者特点包含于本发明公开的至少两个实施例或实施方式中。在本发明公开中,对上述术语的示意性表述不一定指的是相同的示实施例或实施方式。需要说明的是,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于流程图中的顺序执行所示出或描述的步骤。
需要说明的是,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
本发明实施例提供了一种垫圈自动安装机,利用第一导轨和第二导轨将需要装配至转子上下两侧的垫圈分类并分别运送至第一出料槽和第二出料槽,实现垫圈的自动分类和自动上料。垫圈吸嘴和第一转子吸嘴通过双轴移动支架进行移动,实现自动装配转子上下方两侧的垫圈;而第二转子吸嘴能够通过三轴移动支架将工位收集板上的待装配转子运输至定位座中,实现转子的自动上料。因此,通过垫圈上料机构、垫圈安装机构和转子上料机构相互配合,能够实现自动装配转子上下两侧的垫圈,提高装配效率,改善产品良品率。
下面结合附图,对本发明实施例作进一步阐述。
第一方面,参照图1,图1是本发明实施例提供的垫圈自动安装机的结构示意图。
可以理解的是,垫圈自动安装机包括有基座,基座上分别安装有垫圈上料机构100、垫圈安装机构200和转子上料机构300,其中,垫圈安装机构200与转子上料机构300相对设置,且垫圈安装机构200与转子上料机构300位于垫圈上料机构100的同一侧。
参照图2,图2是本发明实施例提供的垫圈上料机构100的部分结构示意图。垫圈上料机构100包括有振动盘101、垫圈出料模块、第一导轨102和第二导轨103,其中,振动盘101用于存储垫圈,并且通过振动将垫圈输送至第一导轨102和第二导轨103上。而第一导轨102和第二导轨103中的其中一条导轨具有翻转部,由于振动盘101将垫圈转移至第一导轨102和第二导轨103后,两条导轨中的垫圈朝向均相同,为了将便于后续垫圈的装配,同时避免垫圈反装的情况出现,通过翻转部将其中一条导轨中的垫圈全部反向,从而实现将正垫圈和反垫圈分类运输至垫圈出料模块中。其中,正垫圈即为用于装配至转子上侧的垫圈,而反垫圈即为用于装配至转子下侧的垫圈。而垫圈出料模块中包括有底板、出料座和封料座,出料座和封料座均安装在底板上,其中,第一出料槽108和第二出料槽109均位于封料座。而出料座开设有第一滑槽104和第二滑槽105,第一导轨102通过第一滑槽104与第一出料槽108连接,第二导轨103通过第二滑槽105与第二出料槽109连接,第一滑槽104和第二滑槽105能够对垫圈进行限位。
另外,第一滑槽104的横截面与第二滑槽105的横截面不同,第一滑槽104的横截面与正垫圈的横截面相匹配,第二滑槽105的横截面与反垫圈的横截面相匹配,从而第一滑槽104和第二滑槽105能够对垫圈进行二次检测,避免垫圈反装。
其中,第一出料槽108的一侧设置有第一光纤传感器106,而第二出料槽109的一侧设置有第二光纤传感器107,第一光纤传感器106和第二光纤传感器107可以检测垫圈是否达到第一出料槽108和第二出料槽109,即可以检测出是否出现垫圈卡料的情况,避免垫圈漏装的情况出现。
参考图3,图3是本发明实施例提供的垫圈安装机构200的部分结构示意图。垫圈安装机构200包括有双轴移动支架206、第一运输模块201和定位座202,定位座202安装在垫圈出料模块的一侧。第一运输模块201包括有第一转子吸嘴203和垫圈吸嘴204,而第一转子吸嘴203和垫圈吸嘴204分别设置有控制接头205和气压传感器,第一转子吸嘴203和垫圈吸嘴204通过各自的控制接头205能够与气缸进行连接,从而能够实现第一转子吸嘴203和垫圈吸嘴204的真空吸附功能。其中,通过调节控制接头205的导通截断状态,能够实现上料和下料的功能,另外,还可以通过改变气缸的气体流动方向,通过第一转子吸嘴203和垫圈吸嘴204的喷气功能,避免出现卡料的情况。由于在第一转子吸嘴203和垫圈吸嘴204成功吸附的情况下,第一转子吸嘴203和垫圈吸嘴204内部形成真空环境,从而能够利用气压传感器检测气压状态来判断第一转子吸嘴203和垫圈吸嘴204是否成功吸附。另外,定位座202也设置有用于与气缸连接的控制接头205,以及用于检测定位座202的气压状态的气压传感器,通过控制接头205和气压传感器判断定位座202内是否已放置转子,同时,当定位座202与气缸连通的情况下,即控制接头205导通,转子能够在真空吸附的情况下固定在定位座202上,提高正垫圈装配的稳定性。
第一运输模块201安装在双轴移动支架206,第一运输模块201能够通过双轴移动支架206实现水平滑动和垂直升降,而双轴移动支架206包括有第一传动模组207,定位座202位于第一传动模组207一端的下方,第一传动模组207由定位座202向垫圈出料模块的方向延伸,因此,第一运输模块201能够利用第一传动模组207在定位座202与垫圈出料模块之间进行往复移动。其中,第一运输模块201中的垫圈吸嘴204和第一转子吸嘴203沿着定位座202向垫圈出料模块的方向进行排列设置,从而垫圈吸嘴204和第一转子吸嘴203结合双轴移动支架206的垂直升降功能以及在定位座202与垫圈出料模块之间进行往复移动的功能,能够实现转子上下侧的垫圈自动装配功能,即利用垫圈吸嘴204将第一出料槽108的正垫圈吸附移动,并装配至定位座202中的转子上方;在正垫圈装配结束后,通过第一转子吸嘴203将带有正垫圈的转子吸附移动,并将转子放置在第二出料槽109中的反垫圈中,同时通过继续下降第一转子吸嘴203,将反垫圈压合固定至转子的下侧,完成对转子上下两侧的垫圈自动装配。
参考图4,图4是本发明实施例提供的转子上料机构300的部分结构示意图。转子上料机构300包括有三轴移动支架301、第二运输模块302和工位收集板303。其中,工位收集板303上设置有多个装配槽,装配槽的形状与转子的形状相匹配,从而工位收集板303能够放置多个待装配装置,便于进行转子上料。而第二运输模块302包括有第二转子吸嘴308,第二转子吸嘴308也相应设置有控制接头205和气压传感器,通过控制接头205和气压传感器确定是否成功吸附转子。
第二运输模块302安装于三轴移动支架301,即第二转子吸嘴308能够用过三轴移动支架301实现水平滑动和垂直升降,其中,三轴移动支架301包括有横向传动模组304,工位收集板303位于横向传动模组304一端的下方,而定位座202位于横向传动模组304另一端的下方,即横向传动模组304由工位收集板303向定位座202方向延伸。另外,三轴移动支架301还包括有纵向传动模组305,纵向传动模组305与横向传动模组304的延伸方向垂直,从而,第二转子吸嘴308可以通过三轴移动支架301从工位收集板303中将待装配的转子吸附转移至定位座202,实现转子的自动上料功能,提高生产效率。
可以理解的是,通过第一光纤传感器106和第二光纤传感器107可以通过与垫圈之间的距离检测第一出料槽108和第二出料槽109内的垫圈是否上料成功。由于垫圈由两个直径不同的环形结构组成,因此垫圈上下部分与传感器之间的距离不相同。从而,通过调整第一光纤传感器106的所处高度和第二光纤传感器107的所处高度,使得第一光纤传感器106的所处高度和第二光纤传感器107的所处高度不同,则可以识别出当前垫圈的朝向,避免垫圈反装。
可以理解的是,第一导轨102和第二导轨103均螺旋设置在振动盘101内,而且第一导轨102和第二导轨103均为切向延伸出振动盘101而与垫圈出料模块连接。振动盘101通过振动将垫圈上料至第一导轨102和第二导轨103,因此在上料阶段同一导轨上的垫圈朝向不同。由于垫圈由两个直径不同的环形结构组成,在螺旋设置的轨道中,朝向不同的垫圈在轨道内滑动与轨道侧壁的接触位置不同。因此,分别在第一导轨102和第二导轨103均具有沿边缘设置且向外侧延伸的导向片,利用导向片将接触位置高的垫片引导滑出导轨,使得同一导轨中的垫圈朝向相同。其中,垫圈在经过翻转部之前,两个导轨中的垫圈均为同一朝向。而导向片位于振动盘101内,因此,被引导滑出导轨的垫片掉落至振动盘101内,从而能够再次利用振动盘101的振动二次上料,实现自动回收和自动上料,提高生产效率。通过导向片和螺旋设置的第一导轨102和第二导轨103相互配合,实现自动筛选朝向不同的垫圈,减少垫圈反装的情况出现,改善产品良品率。
可以理解的是,第一运输模块201还设置有激光传感器,激光传感器可以位于第一转子吸嘴203内,激光传感器也可以位于第一转子吸嘴203远离于垫圈吸嘴204的一侧。第一运输模块201通过激光传感器对转子上侧进行距离检测,由于在安装垫圈后转子距激光传感器的距离发生变化,因此,可以通过激光传感器检测转子上侧是否成功装配垫圈,避免出现垫圈漏装的情况。同时,由于垫圈由两个直径不同的环形结构组成,对垫圈外环高度进行检测,可以判断出垫圈的正反朝向,进而确定出垫圈是否反装,改善产品良品率。
可以理解的是,第二转子吸嘴308设置有测距仪,即千分测厚仪,利用千分测厚仪可以测量转子的转轴长度,检测待装配转子的转轴长度是否达标,避免对转轴长度不达标的转子进行垫圈装配导致材料浪费,改善良品率。同时,由于部分待装配转子上下两侧的转轴长度不相同,即转子有正反之分,通过检测转子的转轴长度来避免垫圈反装。同时在工位收集板303与定位座202之间设置有废料收集板306,废料收集板306用于回收转轴长度不达标的转子。第二转子吸嘴308可以利用横向传动模组304,将工位收集板303中转轴长度不达标的转子运输至废料收集板306中,实现废料的自动检测,提高生产效率。
可以理解的是,第二转子吸嘴308与定位座202之间还设置有滑轨模组307,即滑轨模组307位于纵向传动模组305与定位座202之间。其中,滑轨模组307与三轴移动支架301中的纵向传动模组305相平行,即滑轨模组307与横向传动模组304延伸方向相垂直。而工位收集板303与废料收集板306并列安装于滑轨模组307,因此,通过工位收集板303与废料收集板306可以沿滑轨模组307进行滑动,便于将待装配转子上料至工位收集板303,同时便于回收废料收集板306中的转子。
可以理解的是,垫圈自动安装机还包括有用于转子下料的双轨传送带400,双轨传送带400中间部分留有间隙,从而转子下侧的转轴可以穿过间隙,而转子本体利用双轨传送带400的支撑进行运输。双轨传送带400位于垫圈上料机构100远离于垫圈安装机构200的一侧,且双轨传送带400位于第一传动模组207的下方,因此,第一转子吸嘴203可以利用第一传动模组207将位于第二出料槽109的转子吸附转移至双轨传送带400上,即将上下两侧均装配垫圈后的转子进行下料。其中,由于不同转子的尺寸大小不同,为了提高设备的适配性,在双轨传送带400的出口端设置有涨紧块401,即双轨传送带400的出口端两侧均设置有涨紧块401,通过调节两侧涨紧块401之间的距离,进而调节双轨传送带400中间部分的间隙宽度,达到适配不同尺寸的转子的效果。
可以理解的是,在双轨传送带400的出口端上方架设有挡块402,挡块402能够阻拦转子本体或者转子上侧的转轴,使得转子无法继续移动,避免转子掉落而损坏。
可以理解的是,第一运输模块201还安装有第一位移传感器,垫圈出料模块设置有第二位移传感器,第一位移传感器和第二位移传感器相匹配,从而可以利用相对位置进行准确定位,提高运料的准确性。
可以理解的是,垫圈自动安装机还设置有显示模块,显示模块分别与各个气压传感器连接,即与第一转子吸嘴203连接的气压传感器、与第二转子吸嘴308连接的气压传感器、与垫圈吸嘴204连接的气压传感器,以及与定位座202连接的气压传感器。显示模块能够显示各个气压传感器检测得到的气压状态,从而能够直观显示第一转子吸嘴203、第二转子吸嘴308、垫圈吸嘴204和定位座202的装配情况。
本领域技术人员可以理解的是,图1、图2、图3和图4中示出的垫圈自动安装机的结构并不构成对本发明实施例的限定,可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件布置。
基于上述垫圈自动安装机的结构,提出本发明第二方面的装配控制方法的各个实施例。
参照图5,图5是本发明实施例提供的装配控制方法的流程图,该装配控制方法可以应用于如图1至图4所示的垫圈自动安装机,该装配控制方法包括但不限于有以下步骤:
步骤S101,响应于第一光纤传感器的第一触发信号,控制垫圈吸嘴移动至第一出料槽,导通与垫圈吸嘴连接的控制接头,直至垫圈吸嘴的气压状态满足真空条件;
步骤S102,当定位座的气压状态满足真空条件,控制垫圈吸嘴移动至定位座的上方,并截断与垫圈吸嘴连接的控制接头;
步骤S103,响应于第二光纤传感器的第二触发信号,控制第一转子吸嘴移动至定位座的上方,导通与第一转子吸嘴连接的控制接头并截断与定位座连接的控制接头;
步骤S104,当第一转子吸嘴的气压状态满足真空条件,控制第一转子吸嘴移动至第二出料槽的上方,并控制第一转子吸嘴下压以装配转子下方的垫圈。
可以理解的是,当正垫圈通过第一导轨上料至第一出料槽后,位于第一出料槽一侧的第一光纤传感器被触发,第一光纤传感器产生第一触发信号。因此,当接收到来自于第一光纤传感器的第一触发信号,则可以认为正垫圈已经位于第一出料槽内,可以利用垫圈吸嘴进行取料。从而,控制垫圈吸嘴移动至第一出料槽的上方后,控制垫圈吸嘴利用双轴移动支架下降,同时导通与垫圈吸嘴连接的控制吸头,使得气缸与垫圈吸嘴连通,垫圈吸嘴处产生负压将第一出料槽内的正垫圈吸附。在垫圈吸嘴内设置有气压传感器,当垫圈吸嘴成功吸附垫圈,垫圈吸嘴的气压状态发生变化,即垫圈吸嘴的气压状态满足真空条件。相应地,由于定位座内也设置有控制接头和气压传感器,因此,可以通过导通与定位座连接的控制价接头,使得气缸与定位座连通。当定位座内存在转子,定位座内的气压状态则改变为真空状态,即定位座的气压状态满足真空条件。因此,当定位座的气压状态满足真空条件,即可以认为待装配的转子已经位于定位座,则控制垫圈吸嘴移动至定位座的上方并下降预设的时间,使得垫圈吸嘴移动至转子的上方,从而在与垫圈吸嘴连接的控制接头截断后,垫圈能够稳定地套设在转子转轴上,完成转子上侧垫圈的自动装配。
当接收到来自于第二光纤传感器的第二触发信号,可以认为反垫圈已经通过第二导轨到达第二出料槽。因此,在与垫圈吸嘴连接的控制接头截断后,则控制第一转子吸嘴移动至定位座的上方并下降至转子的上方,导通与第一转子吸嘴连接的控制接头,同时截断与定位座连接的控制接头,使得定位座失去对转子的吸附能力,第一转子吸嘴能够成功吸附转子并带动转子移动。在第一转子吸嘴的气压状态满足真空条件的情况下,可以认为第一转子吸嘴已经成功吸附了转子,则控制第一转子吸嘴移动,将转子输送至第二出料槽的上方,并控制第一转子吸嘴下压进行转子下方垫圈的装配,从而实现了转子上下两侧的垫圈自动装配,无需人工装配,提高装配效率。其中,可以第一触发信号和/或第二触发信号进行实时检测,也可以对第一触发信号和/或第二触发信号进行周期性检测。例如,可以对第一触发信号进行周期性检测,而对第二触发信号进行实时检测,达到定时对转子进行自动装配,避免正垫圈上料速度与正垫圈装配速度不匹配而导致的多装情况出现,而可以对第二触发信号进行实时检测,正垫圈装配完毕后,对第二触发信号实时检测,能够提高反垫圈的装配速度。
需要说明的是,该装配控制方法可以利用第一运输模块中的第一位移传感器与垫圈出料模块的第二位移传感器两者所发出的位移信号对垫圈和转子进行准确定位,提高装配的准确度。
需要说明的是,该装配控制方法还可以控制第二转子吸嘴移动至工位收集板相应的位置,同时导通与第二转子吸嘴的控制接头,对工位收集板上的转子进行吸附。由于第二转子吸嘴内设置有千分测厚仪即测距仪,能够对吸附中的转子转轴长度进行检测判断。当转子转轴长度不满足预设长度阈值,则控制第二转子吸嘴将该转子运输至废料收集板上。而当转子转轴长度满足预设长度阈值且定位座的气压状态不满足真空条件,则控制第二转子吸嘴将该转子运输至定位座上,其中,在定位座的气压状态满足真空条件的情况下,则维持第二转子吸嘴不动,直至定位座的气压状态不满足真空条件。
需要说明的是,该装配控制方法还可以在控制第一转子吸嘴下压进行转子下方垫圈的装配之后,再控制第一转子吸嘴上升,并沿双轨传送带的方向移动。当第一转子吸嘴到达双轨传送带的上方之后,第一转子吸嘴带动装配完成后的转子下降,并截断与第一转子吸嘴连接的控制接头,将装配完成后的转子放置在双轨传送带进行下料。
需要说明的是,该装配方法还可以在截断控制接头之后进行真空检测,即在截断与垫圈吸嘴、第一转子吸嘴、第二转子吸嘴和定位座的控制接头之后,通过气压传感器进行气压状态的检测。若气压状态仍满足真空条件,则再次导通控制接头,使得气缸向垫圈吸嘴、第一转子吸嘴、第二转子吸嘴或定位座进行喷气,使得垫圈或转子脱离,保证下料。
参考图6,图6为本发明的第三方面实施例提供的一种运行控制装置600的结构示意图,运行控制装置600包括:存储器610、处理器620及存储在存储器610上并可在处理器620上运行的计算机程序,处理器620执行计算机程序时实现如上述实施例中的装配控制方法。
存储器610作为一种非暂态计算机可读存储介质,可用于存储非暂态软件程序以及非暂态性计算机可执行程序,如本发明上述实施例中的装配控制方法。处理器620通过运行存储在存储器610中的非暂态软件程序以及指令,从而实现上述本发明上述实施例中的装配控制方法。
存储器610可以包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需要的应用程序;存储数据区可存储执行上述实施例中的装配控制方法所需的数据等。此外,存储器610可以包括高速随机存取存储器610,还可以包括非暂态存储器610,例如至少一个磁盘存储器件、闪存器件、或其他非暂态固态存储器件。需要说明的是,存储器610可选包括相对于处理器620远程设置的存储器610,这些远程存储器610可以通过网络连接至该终端。上述网络的实例包括但不限于互联网、企业内部网、局域网、移动通信网及其组合。
实现上述实施例中的装配控制方法所需的非暂态软件程序以及指令存储在存储器中,当被一个或者多个处理器执行时,执行上述实施例中的装配控制方法,例如,执行以上描述的图5中的方法步骤S101至步骤S104。
本发明的第四方面实施例提供一种计算机可读存储介质,计算机可读存储介质存储有计算机可执行指令,计算机可执行指令可以用于使计算机执行如上第二方面实施例的装配控制方法,例如,执行以上描述的图5中的方法步骤S101至步骤S104。
本领域普通技术人员可以理解,上文中所公开方法中的全部或某些步骤、系统可以被实施为软件、固件、硬件及其适当的组合。某些物理组件或所有物理组件可以被实施为由处理器,如中央处理器、数字信号处理器或微处理器执行的软件,或者被实施为硬件,或者被实施为集成电路,如专用集成电路。这样的软件可以分布在计算机可读介质上,计算机可读介质可以包括计算机存储介质或非暂时性介质和通信介质或暂时性介质。如本领域普通技术人员公知的,术语计算机存储介质包括在用于存储信息诸如计算机可读指令、数据结构、程序模块或其他数据的任何方法或技术中实施的易失性和非易失性、可移除和不可移除介质。计算机存储介质包括但不限于RAM、ROM、EEPROM、闪存或其他存储器技术、CD-ROM、数字多功能盘DVD或其他光盘存储、磁盒、磁带、磁盘存储或其他磁存储装置、或者可以用于存储期望的信息并且可以被计算机访问的任何其他的介质。此外,本领域普通技术人员公知的是,通信介质通常包含计算机可读指令、数据结构、程序模块或者诸如载波或其他传输机制之类的调制数据信号中的其他数据,并且可包括任何信息递送介质。
上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
- 一种洗衣机桶内灯光控制方法、装置、存储介质及洗衣机
- 一种洗衣机控制方法、装置、存储介质及洗衣机
- 一种挂烫机的蒸汽控制方法、挂烫机、装置及存储介质
- 一种洗衣机的控制方法、装置、存储介质及洗衣机
- 一种洗衣机控制方法、装置、存储介质及洗衣机
- 塔机及其装配控制方法、控制装置和存储介质
- 塔机及其装配控制方法、控制装置和存储介质