距离测量装置以及距离测量方法
文献发布时间:2023-06-19 09:46:20
关联申请
本申请享有以日本专利申请2019-137157号(申请日:2019年7月25日)为基础申请的优先权。本申请通过参照该基础申请,包含基础申请的所有内容。
技术领域
本发明的实施方式涉及距离测量装置以及距离测量方法。
背景技术
已知被称为LIDAR(Light Detection and Ranging,光检测和测距,LaserImaging Detection and Ranging,激光成像检测和测距)的距离测量装置。在该距离测量装置中,将激光照射到测量对象物,根据传感器输出将由测量对象物反射的反射光的强度变换为时间序列亮度信号。由此,根据激光的发光的时间点与和亮度信号值的波峰对应的时间点的时间差,测量距测量对象物的距离。
然而,有时激光因附着于距离测量装置的罩玻璃、反射镜、框体以及罩的尘埃等而反射,产生杂散光。基于该杂散光的时间序列亮度信号与基于测量对象物的时间序列亮度信号重叠,有可能会无法得到距测量对象物的距离值。另外,与基于杂散光的重叠同样地,有可能会因来自存在于对象物的附近的反射率高的物体(例如白色的车)、映到镜面(例如金属涂饰的车的表面)的物体(例如自己的车)的强的反射光的重叠而无法得到距测量对象物的距离值。
发明内容
本发明的实施方式提供即使在存在杂散光、来自高反射物的反射光等强反射光的情况下也能够生成距测量对象物的距离值的距离测量装置以及距离测量方法。
实施方式的距离测量装置处理根据与激光的反射光相应的传感器输出而生成的第1时间序列亮度信号,其中,所述距离测量装置具备测量信号生成电路和测量处理电路。测量信号生成电路生成第3时间序列亮度信号,该第3时间序列亮度信号是从所述第1时间序列亮度信号减去与基于激光的来自测定对象物外的反射光相应的第2时间序列亮度信号而得到的。测量处理电路根据第3时间序列亮度信号,生成距测定对象物的距离值。
附图说明
图1是示出本实施方式的驾驶支援系统的概略的整体结构的图。
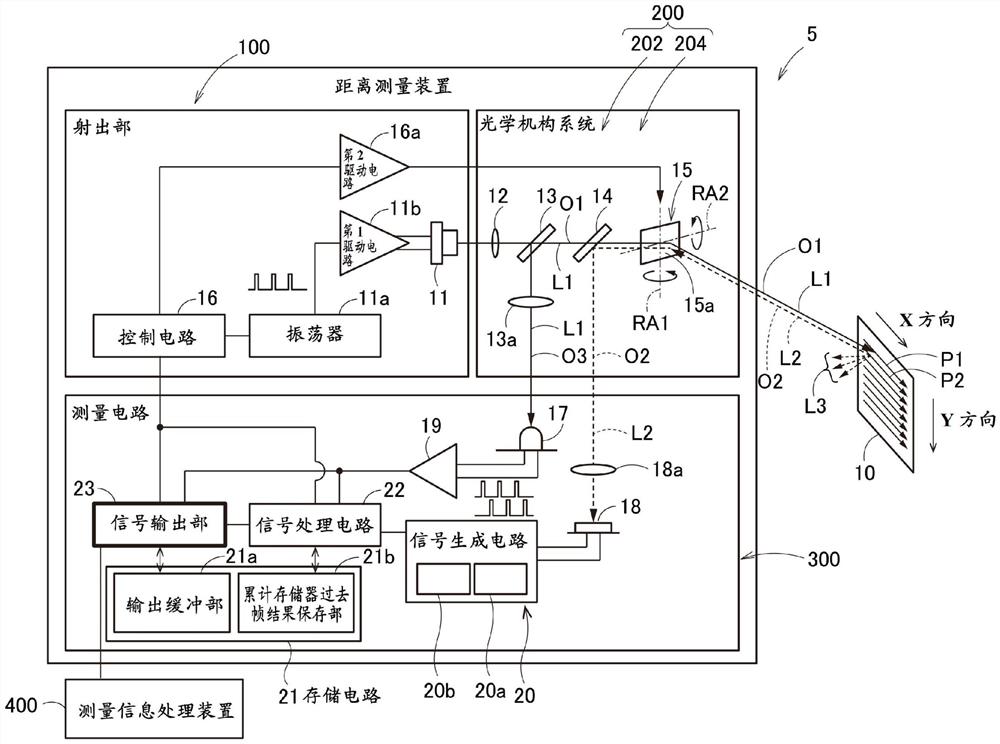
图2是示出第1实施方式的距离测量装置的结构例的图。
图3是示意地示出一帧中的光源的射出图案的图。
图4是将一帧中的激光的测量对象物上的照射位置放大而示出的示意图。
图5是将照射顺序与图4不同的测量对象物上的照射位置放大而示出的示意图。
图6是示出使用一维状的激光源同时照射一纵列的例子的图。
图7A是示出使用一维状的激光源按照水平行同时照射一纵列的例子的图。
图7B是示出多边形反射镜的例子的图。
图7C是示出照射到多边形反射镜的照射面的纵向细长的形状的激光的例子的图。
图8是示出传感器中的受光元件的结构例的图。
图9是示出雪崩光电二极管的电压、电流特性的一个例子的图。
图10是示出盖革(Geiger)放电时的电流、时间特性的一个例子的图。
图11是示出第1时间序列亮度信号的一个例子的图。
图12是示出信号处理电路的结构的框图。
图13A是示出在散焦时在测量对象内白色的车与相向车重叠的例子的图。
图13B是示出测量对象为金属车的例子的图。
图13C是示出在基于杂散光的放电时有反射光的情况下的电流、距离特性的一个例子的图。
图13D是示出有基于白色的车的反射光的情况下的电流、距离特性的一个例子的图。
图13E是示出金属车为测定对象的情况下的电流、距离特性的一个例子的图。
图14是概念性地示出原信号生成电路的处理例的图。
图15A是概念性地示出第1时间序列亮度信号堆集的状态下的处理例的图。
图15B是概念性地示出因上升而花费时间的情况下的处理例的图。
图15C是概念性地示出测量镜面状的对象而得到的第1时间序列亮度信号的处理例的图。
图15D是概念性地示出寄生电阻、电容的影响更大的情况下的处理例的图。
图15E是概念性地示出第1时间序列亮度信号B1的平缓部分的顶端区域的处理例的图。
图16是概念性地示出校正电路的处理例的图。
图17是示出距离测量装置的处理例的流程图。
图18是示出第2实施方式的信号处理电路的结构的框图。
图19是示出第2实施方式的距离测量装置的处理例的流程图。
图20是示出第2实施方式的第1变形例的距离测量装置的处理例的流程图。
图21是示出第2实施方式的第2变形例的距离测量装置的处理例的流程图。
图22是示出第2实施方式的第3变形例的距离测量装置的处理例的流程图。
具体实施方式
以下,参照附图,详细地说明本发明的实施方式的距离测量装置以及距离测量方法。此外,以下所示的实施方式是本发明的实施方式的一个例子,本发明并不限定于这些实施方式来解释。另外,在本实施方式中参照的附图中,有时对相同部分或者具有同样的功能的部分附加相同的附图标记或者类似的附图标记,省略其重复的说明。另外,关于附图的尺寸比例,为了便于说明,存在与实际的比例不同的情况、结构的一部分从附图省略的情况。
(第1实施方式)
图1是示出本实施方式的驾驶支援系统1的概略的整体结构的图。如该图1所示,驾驶支援系统1进行基于距离图像的驾驶支援。驾驶支援系统1构成为具备距离测量系统2、驾驶支援装置500、声音装置502、制动装置504以及显示装置506。距离测量系统2生成测量对象物10的距离图像,并且具备距离测量装置5和测量信息处理装置400。
距离测量装置5使用扫描方式以及TOF(Time Of Flight,飞行时间)方式来测量距测量对象物10的距离。更具体而言,该距离测量装置5构成为具备射出部100、光学机构系统200以及测量电路300。
射出部100间歇地射出激光L1。光学机构系统200将射出部100射出的激光L1照射到测量对象物10,并且使在测量对象物10上反射的激光L1的反射光L2入射到测量电路300。在此,激光意味着相位以及频率大致一致的光。另外,反射光L2意味着基于激光L1的散射光中的预定方向的光。
测量电路300根据经由光学机构系统200接收到的反射光L2,测量距测量对象物10的距离。即,该测量电路300根据射出部100将激光L1向测量对象物10照射的时间点与测量出反射光L2的时间点的时间差,测量距测量对象物10的距离。
测量信息处理装置400进行噪声的降低处理,根据距测量对象物10上的多个测定点的距离,输出距离图像数据。测量信息处理装置400的一部分或者全部也可以嵌入到距离测量装置5的框体内。
驾驶支援装置500根据测量信息处理装置400的输出信号来支援车辆的驾驶。声音装置502、制动装置504、显示装置506等连接于驾驶支援装置500。
声音装置502例如为扬声器,配置于能够从车辆内的驾驶座听到的位置。驾驶支援装置500根据测量信息处理装置400的输出信号,使声音装置502产生例如“距对象物为5米”等声音。由此,例如即使在驾驶员的注意力下降的情况下,通过听到声音,也能够引起驾驶员的注意。
制动装置504例如为辅助制动。驾驶支援装置500根据测量信息处理装置400的输出信号,例如在对象物接近至预定的距离、例如3米的情况下,使制动装置504对车辆进行制动。
显示装置506例如为液晶监视器。驾驶支援装置500根据测量信息处理装置400的输出信号,将图像显示于显示装置506。由此,例如即使在逆光时等,通过参照显示于显示装置506的图像,也能够更准确地掌握外部信息。
接下来,根据图2,说明本实施方式的距离测量装置5的射出部100、光学机构系统200以及测量电路300的更详细的结构例。图2是示出第1实施方式的距离测量装置5的结构例的图。如图2所示,距离测量装置5构成为具备射出部100、光学机构系统200、测量电路300以及测量信息处理装置400。在此,将散射光L3中的预定的方向的散射光称为反射光L2。
射出部100具有光源11、振荡器11a、第1驱动电路11b、控制电路16以及第2驱动电路16a。
光学机构系统200具有照射光学系统202和受光光学系统204。照射光学系统202具有透镜12、第1光学元件13、透镜13a以及反射镜(反射器件)15。
受光光学系统204具有第2光学元件14和反射镜15。即,这些照射光学系统202以及受光光学系统204共用反射镜15。
测量电路300具有光检测器17、传感器18、透镜18a、第1放大器19、信号生成电路20、存储电路21、信号处理电路22以及信号输出部(输出接口)23。另外,本实施方式的信号处理电路22对应于信号处理装置。
射出部100的振荡器11a根据控制电路16的控制,生成脉冲信号。第1驱动电路11b根据振荡器11a生成的脉冲信号来驱动光源11。光源11例如为激光二极管等激光源,与由第1驱动电路11b进行的驱动相应地间歇地发出激光L1。
图3是示意地示出一帧中的光源11的射出图案的图。在图3中,横轴表示时刻,纵线表示光源11的射出定时。上侧的图为下侧的图中的局部放大图。如该图3所示,光源11例如以T=几微秒~几十微秒的间隔间歇地重复发出激光L1(n)(0≤n 如图2所示,在照射光学系统202的光轴O1上依次配置有光源11、透镜12、第1光学元件13、第2光学元件14以及反射镜15。由此,透镜12使间歇地射出的激光L1变准直,导光到第1光学元件13。 第1光学元件13使激光L1透过,并且使激光L1的一部分沿着光轴O3入射到光检测器17。第1光学元件13例如为分束器。 第2光学元件14使透过了第1光学元件13的激光L1进一步透过,使激光L1入射到反射镜15。第2光学元件14例如为半反射镜、开孔镜。 反射镜15具有使从光源11间歇地射出的激光L1反射的反射面15a。反射面15a例如能够以相互交叉的两个转动轴线RA1、RA2为中心而转动。由此,反射镜15周期性地变更激光L1的照射方向。 控制电路16例如具有CPU(Central Processing Unit,中央处理单元),对第2驱动电路16a进行使反射面15a的倾斜角度连续地变更的控制。第2驱动电路16a依照从控制电路16供给的控制信号,驱动反射镜15。即,控制电路16控制第2驱动电路16a,使激光L1的照射方向变更。将使光的照射方向等变更这一动作称为扫描。 图4是将一帧中的激光L1的测量对象物10上的照射位置放大而示出的示意图。如该图4所示,反射面15a针对每个激光L1变更照射方向,沿着测量对象物10上的大致平行的多个直线路径P1~Pm(m为2以上的自然数)离散地进行照射。这样,本实施方式的距离测量装置5针对各帧f(m)(0≤m 图5是将照射顺序与图4不同的测量对象物10上的照射位置放大而示出的示意图。在该情况下,以首先在向图的右方向扫描之后折返而向左方向扫描进而向右方向扫描这样的方式重复扫描。作为实现如图5那样的扫描的单元,例如有2轴的MEMS(Micro ElectroMechanical Systems,微机电系统)。图6是示出使用具有纵向细长的形状的照射面的激光源以及/或者具有各向异性的非球面准直透镜来在一纵列同时照射多个像素的例子的图。作为进行如图6那样的扫描的单元,有旋转镜、1轴的MEMS。另外,还能够采用不使用反射镜15而使距离测量装置5直接旋转的旋转方法。在该情况下,也不使用第2光学元件14。 图7A是示出在垂直方向上改变方向而将使用具有纵向细长的形状的照射面的激光源以及/或者具有各向异性的非球面准直透镜来在一纵列同时照射多个像素重复多次的例子的图。 作为进行如图7A那样的扫描的单元,例如有图7B、C所示的具有不同的倾角的多边形反射镜。图7B是示出例如配置于反射镜15(图2)的位置的多边形反射镜700的例子的图。图7C是示出照射到多边形反射镜的照射面701的纵向细长的形状的激光的例子的图。图7B的照射面701针对各面而倾角不同。由此,通过多边形反射镜700旋转,被照射的激光的照射方向在垂直方向改变。 另外,作为进行如图7A那样的扫描的其它单元,有旋转镜以及2轴的MEMS。以上的扫描方法为机械性的方法,但作为进行其它扫描的现有方法,有OPA方法(Optical Phasedarray,光学相控阵)。本实施方式不依赖于扫描光的方法,所以通过机械性的方法和OPA方法都可以扫描光。 这样,本实施方式的激光L1(n)如图4、5所示一点一点依次被照射,但不限定于此,也可以同时照射多个点。例如,也可以如图6或者图7A所示,使用一维状的激光源同时照射一纵列。在此,为了易于说明,将测量对象物10设为平板状而在图4中示意地图示出,但在实际的测量中测量对象物10例如为汽车等。 激光L1(n)与L1(n+1)的测量对象物10上的照射位置的间隔对应于激光L1间的照射间隔T=几微秒~几十微秒(图3)。这样,在各直线路径P1~Pm上离散地照射照射方向不同的激光L1。此外,直线路径的数量、扫描方向不被特别限定。 如图2所示,在受光光学系统204的光轴O2上,按照反射光L2入射的顺序,配置有反射镜15的反射面15a、第2光学元件14、透镜18a、传感器18。在此,光轴O1与通过透镜12的中心位置的透镜12的焦点轴一致。光轴O2与通过透镜18a的中心位置的透镜18a的焦点轴一致。 反射面15a使在测量对象物10上散射的散射光L3中的沿着光轴O2前进的反射光L2入射到第2光学元件14。第2光学元件14改变由反射面15a反射的反射光L2的行进方向,沿着光轴O2入射到测量电路300的透镜18a。作为使光轴O2从光轴O1分离而入射到透镜18a的方法,还能够不使用第2光学元件14而采用如下方法:增大反射镜反射面15a,使光轴O1与光轴O2分离,使反射光L2从反射镜反射面15a直接入射到透镜18a(分离光学系统)。透镜18a使沿着光轴O2入射的反射光L2聚光到传感器18。 另一方面,散射光L3中的向与激光L1不同的方向反射的光的行进方向从受光光学系统204的光轴O2偏离。因此,入射到从传感器18的入射面偏离的位置。相对于此,在被任意物体散射的太阳光等环境光之中有沿着光轴O2行进的光,这些光随机地入射到传感器18的入射面,成为随机噪声。 此外,在图2中为了明确化,将激光L1和反射光L2的光路分开地图示出,但除了分离光学系统之外,实际上它们重叠。另外,将激光L1的光束的中心的光路设为光轴O1而图示出。同样地,将反射光L2的光束的中心的光路设为光轴O2而图示出。 图8是示出传感器18中的受光元件的结构例的图。该传感器18例如包括光电倍增管(SiPM:Silicon Photomultipliers,以硅为材料的情况)。光电倍增管为集成有多个单光子雪崩二极管(SPAD:Single-Photon Avalanche Diode)的光子计数器件。光电倍增管能够检测光子计数级别的微弱的光。 更具体而言,传感器18将经由受光光学系统204接收到的反射光L2变换为电信号。该传感器18的受光元件180是将具有盖革模式的雪崩光电二极管(APD:Avalanche PhotoDiod)180a和淬灭(quench)电阻180b的SPAD并联地连接多个而成的。 雪崩光电二极管180a为利用被称为雪崩倍增的现象使受光灵敏度上升的受光元件。在盖革模式下使用的雪崩光电二极管180a一般与淬灭元件(后述)一起使用,被称为单一光子雪崩光电二极管(SPAD),以硅为材料的SPAD例如对于在200nm~1000nm的波长的光具有灵敏度。 图9是示出盖革模式的雪崩光电二极管180a的电压、电流特性的一个例子的图。横轴表示电压,纵轴表示电流。当使逆电压成为击穿电压V 淬灭电阻180b与雪崩光电二极管180a串联地连接。该淬灭电阻180b使雪崩光电二极管180a的盖革放电停止。即,在盖革放电时,在淬灭电阻180b中流过电流,从而施加到雪崩光电二极管180a的电压下降至击穿电压V 图10是示出盖革放电时的电流、时间特性的一个例子的图。横轴表示时间,纵轴表示电流。盖革模式时的电流I 本实施方式的传感器18包括硅光电倍增管,但不限定于此。例如,也可以将光电二极管(Photodiode)、雪崩二极管(ABD:avalanche breakdown diode)、以化合物半导体为材料的光电倍增管等配置多个来构成传感器18。光电二极管例如包括作为光检测器发挥作用的半导体。雪崩二极管为通过利用特定的逆电压来引起雪崩击穿来将倍增率提高到中等程度的光电二极管。 如图2所示,信号生成电路20以预定的采样间隔将传感器18输出的电信号变换为时间序列亮度信号。该信号生成电路20具有放大器20a和AD变换器20b。放大器20a例如将基于反射光L2的电信号进行放大。更具体而言,作为放大器20a,使用将传感器18的电流信号变换为电压信号并放大的跨阻放大器(TIA)等。这样,将以预定的采样间隔对基于反射光L2的电信号进行采样得到的信号称为时间序列亮度信号。即,时间序列亮度信号为以预定的采样间隔对反射光L2的时间的变化进行采样而得到的值的序列。 AD变换器20b(ADC:Analog to Digital Convertor,模数转换器)在多个采样定时对放大器20a放大后的电信号进行采样,变换为与激光L1的照射方向对应的第1时间序列亮度信号B1。例如,对放大器20a放大后的图10所示的电信号进行采样。在该情况下,信号生成电路20生成的第1时间序列亮度信号为非对称。即,在雪崩光电二极管180a(图8)中,与入射的光子相应地信号生成电路20生成的第1时间序列亮度信号为非对称。 图11是示出第1时间序列亮度信号B1(x,y)的一个例子的图。即,是示出基于信号生成电路20的电信号的采样值的一个例子的图。图11的横轴表示采样定时,纵轴表示第1时间序列亮度信号B1(x,y)的采样值、即亮度值。 例如,对采样定时t0~t32加上消隐时间而得到的时间对应于从照射激光L1(n)起至照射接下来的激光L1(n+1)为止的经过时间T(图3)。图中的波峰为基于反射光L2的采样值,表示该波峰的采样定时TL2对应于距测量对象物10的距离的两倍。 更具体而言,通过距离=光速×(采样定时TL2-光检测器17检测到激光L1的定时)/2这样的公式求出距离。在此,采样定时为从激光L1的发光开始时刻起的经过时间。 在此,第1时间序列亮度信号B1(x,y)的坐标(x,y)表示根据激光L1(n)(0≤n 如图2所示,存储电路21例如由逻辑电路中的寄存器、SRAM、DRAM(Dynamic RandomAccess Memory,动态随机存取存储器)、闪存存储器等半导体存储器元件、硬盘、光盘等实现。 存储电路21具有输出缓冲部21a和累计存储器过去帧结果保存部21b。输出缓冲部21a为信号输出部23的缓冲器。累计存储器过去帧结果保存部21b存储信号处理部22的处理结果。累计存储器过去帧结果保存部21b例如存储测距结果(包括亮度、可靠度等)。 图12是示出信号处理电路22的结构的框图。如图12所示,信号处理电路22例如包括包含MPU(Micro Processing Unit,微处理单元)的逻辑电路,根据光检测器17检测到激光L1的定时与传感器18检测到反射光L2的定时的时间差来测量距离。即,该信号处理电路22为生成与每个第1时间序列亮度信号B1(x,y)(0≤x 测量信号生成电路24生成从第1时间序列亮度信号B1(x,y)(0≤x 测量处理电路26根据第3时间序列亮度信号B3(x,y)(0≤x 杂散光意味着在距离测量装置5的框体内部等处发生的不需要的光的散射。例如,作为反射物,有距离测量装置5的框体内部的光轴L1、L2上的光学构件。作为该光学构件,有罩玻璃、反射镜、透镜以及框体等。另外,反射物不限定于光学构件,还包括附着于罩玻璃、反射镜、透镜等的尘埃等。一般来说杂散光的光量大,有时来自测量对象10的反射光L2被湮没而无法测定。 图13A是示出在散焦时在测量对象10内白色的车与相向车重叠的例子的图。如图13A所示,与杂散光不同,当在散焦时以与作为测量对象10的相向车重叠的方式在测量对象10的跟前存在作为高反射物的白色的车时,有时来自测量对象10的反射光L2被湮没于该高反射光,无法测定。这样的高反射物在测量对象10为汽车的情况下,例如为白色的汽车、金属车等。由此,例如可能发生看丢隐藏于白色的车的阴影的发黑的相向车这样的现象。 图13B是示出测量对象10为金属车的例子的图。金属车对激光L1进行镜面反射。由此,将激光L1照射到本车。照射到本车的激光L1被本车反射,进而被金属车等高反射物反射。在这样的情况下,有时来自本车的反射光L2被湮没于来自金属车的反射光,无法测定。由此,可能发生看丢金属车这样的现象。这样,当如杂散光、来自高反射物的反射光那样的强反射光与来自测量对象10的反射光L2重叠时,有时反射光L2被湮没于杂散光等,无法测定。此外,来自高反射物的强的反射光也在妨碍基于反射光L2的测距这样的点上相同,所以在本专利说明书中,为了简单,还包含L2以外的强的反射光,基本上简记为杂散光。 在此,根据图13C至13E,详细地说明产生杂散光的情况下的课题。图13C是示出在基于杂散光的盖革放电时有来自近距离的反射光的情况下的电流、距离特性的一个例子的图。横轴表示距离,纵轴表示电流。如前所述该电流被TIA放大,变换为电压,进而由AD变换器变换为数字信号,但为该内容表示亮度值的信号这点未改变。因此,此后,简记为亮度值。在图13C中,用以光速换算的距离表示从激光器发光起的经过时间。 在图13C中,示出了由附着于距离测量装置5的罩玻璃、反射镜、框体、罩的尘埃等产生杂散光的例子。即,在测定距离大致为0米的位置处发生传感器18的盖革放电。如图10所示,发生盖革放电之后的恢复的时间由时间常数Tres=Rq×C决定。例如,在时间常数Tres=15ns的情况下,设为光速c=299792458m/s,当将淬灭的时间换算成距测量对象10的距离时,15ns×c/2=2.23米。因此,在距测量对象10的距离小于2.23米时测量对象10的反射光的时间序列亮度信号被湮没于基于杂散光的时间序列亮度信号而无法测定。杂散光的光强度强,所以实际上例如距测量对象10的距离在为5米以下的范围内产生影响的情况多。 图13D是示出有基于高反射物(例如白色的车)的反射光的情况下的亮度值、距离特性的一个例子的图。横轴表示距离,纵轴表示亮度值。在图13D中,用以光速换算的距离表示从激光器发光起的经过时间。这样,测量对象10的反射光的时间序列亮度信号被湮没于基于高反射光的时间序列亮度信号而无法测定。 图13E是示出具有镜面状的高反射面的反射物(例如金属车)为测定对象10的情况下的亮度值、距离特性的一个例子的图。横轴表示距离,纵轴表示亮度值。在该情况下,具有镜面状的高反射面的反射物(例如金属车)的反射光处于比本车的反射光近的距离。这样,具有镜面状的高反射面的例如金属车的反射光的信号被湮没于本车的反射光而不形成波峰。 在此,说明测量信号生成电路24的详细内容。 滤波器电路24a进行降低第1时间序列亮度信号B1的噪声的滤波处理。滤波器电路24a例如使用有限脉冲响应(FIR:Finite Impilse Response)滤波器来降低第1时间序列亮度信号B1的噪声。 图14是概念性地示出原信号生成电路24b的处理例的图。纵轴表示时间序列亮度信号的亮度值,横轴表示距离。即,横轴用以光速换算的距离表示从激光器发光起的经过时间。从左侧起依次示出第1时间序列亮度信号B1、第2时间序列亮度信号B2以及第3时间序列亮度信号B3。 如图14所示,原信号生成电路24b生成从第1时间序列亮度信号B1减去非对称的第2时间序列亮度信号B2而得到的第3时间序列亮度信号B3。即,第2时间序列亮度信号B2相当于由信号生成电路20对盖革放电以后的电信号(图10)进行数字变换后的时间序列亮度信号。如上所述,根据由传感器18中的受光元件的特性确定的时间常数Tres=Rq×C,因预定的过度现象而产生盖革放电以后的电信号的时间序列变化。因此,当第1时间序列亮度信号B1的峰值确定时,能够推测盖革放电以后的电信号的时间序列变化。 由此,原信号生成电路24b根据第1时间序列亮度信号B1的波峰以及为了获取第1时间序列亮度信号而使用的受光元件的特性,生成第2时间序列亮度信号B2。 更详细而言,原信号生成电路24b使第1时间序列亮度信号B1的波峰的值与时间经过相应地减少,生成第2时间序列亮度信号B2。例如,原信号生成电路24b依照(1)式生成第2时间序列亮度信号B2(t)。在此,V B B2(t)=V 另外,如(2)式所示,原信号生成电路24b从初始值V 另外,杂散光一般起因于距离测量装置5的框体内部的光学构件、内部的尘埃等或者漂浮于从照射光学系统202(图2)的射出部起最近距离的空间的尘埃等。因此,原信号生成电路24b根据在从激光L1的射出定时起预定时间内产生的第1时间序列亮度信号B1的波峰,生成非对称的第2时间序列亮度信号B2。例如,根据在从激光L1的射出定时起例如0.2ns(相当于0.6米)以下的时间产生的第1时间序列亮度信号B1的波峰,生成非对称的第2时间序列亮度信号B2。此外,在此,硅光电倍增管的响应信号的上升时间大致为0.2ns以内。 另一方面,原信号生成电路24b当在从激光L1的射出定时起预定时间内、例如0.2ns以下不产生第1时间序列亮度信号B1的波峰的情况下,判断为未产生杂散光,抑制减去第2时间序列亮度信号B2。由此,当在近距离、例如3米左右的位置处存在测量对象10的情况下,能够防止作为杂散光处理。 图15A是概念性地示出第1时间序列亮度信号B1堆集(Pile UP)的状态下的处理例的图。纵轴表示时间序列亮度信号的亮度值,横轴表示距离。即,横轴用以光速换算的距离表示从激光器发光起的经过时间。从左侧起依次示出第1时间序列亮度信号B1、第2时间序列亮度信号B2以及第3时间序列亮度信号B3。 如上所述,本实施方式的传感器18(图2)包括多个SPAD,每单位时间的受光光子数与传感器的输出值的关系在每单位时间的受光光子数少时具有线性特性。另一方面,当每单位时间的受光光子数变大时,传感器的输出值饱和,每单位时间的受光光子数与传感器的输出值的关系具有非线性特性。因此,有时如图15A的左图所示,第1时间序列亮度信号B1的波峰作为一定值而产生,或者作为平稳的波峰而产生。这样的输出值饱和的状态被称为堆集。另外,将其饱和区域称为堆集部分。 原信号生成电路24b当在第1时间序列亮度信号B1中产生堆集的情况下,除掉堆集部分的时间序列亮度信号,生成新的第1时间序列亮度信号B1。然后,如图14所示,根据新的第1时间序列亮度信号B1的波峰,生成第2时间序列亮度信号B2。例如,原信号生成电路24b在第1时间序列亮度信号B1超过预定值的情况下,根据预定值以下的第1时间序列亮度信号B1和基于预定值的非对称的时间序列亮度信号B2,作为数字信号值而生成第3时间序列亮度信号B3。由此,在产生堆集的情况下,也能够以更高精度生成第3时间序列亮度信号B3。 本实施方式的原信号生成电路24b在第1时间序列亮度信号B1的值超过预定值的情况下判定为产生堆集,但不限定于此。例如,原信号生成电路24b运算第1时间序列亮度信号B1的包括最大值的预定范围中的第1时间序列亮度信号B1的时间微分,在时间微分为预定值以下的情况下判定为产生堆集。 图15B是概念性地示出因第1时间序列亮度信号B1的上升而花费时间的情况下的处理例的图。纵轴表示时间序列亮度信号的亮度值,横轴表示距离。即,横轴用以光速换算的距离表示从激光器发光起的经过时间。从左侧起依次示出第1时间序列亮度信号B1、第2时间序列亮度信号B2以及第3时间序列亮度信号B3。如图15B所示,由于寄生电阻、电容等的影响,有时第1时间序列亮度信号B1的上升比一般的第1时间序列亮度信号B1的上升(例如图14)花费时间。 B2(t)=k3×Δt×n (3) 在该情况下,原信号生成电路24b关于上升的期间,首先,生成用(3)式表示的单调增加的第2时间序列亮度信号B2,接着,关于下降的期间,生成(2)式的单调减少的第2时间序列亮度信号B2。此外,通常,k3的绝对值比k2((2)式)的绝对值大,上升时的倾斜度陡峭。然后,从第1时间序列亮度信号B1减去非对称的第2时间序列亮度信号B2,作为数字信号值而生成第3时间序列亮度信B3。在仅通过(2)式来生成第2时间序列亮度信号B2的情况下,第1时间序列亮度信号B1的上升的部分的信号不被删除而残留,有可能会产生伪波峰信号(错误的测量)。因此,通过使用(3)式,第1时间序列亮度信号B1的上升的部分也包括在内被删除,进行错误的测量的可能性变低。 图15C是概念性地示出测量出镜面状的测量对象(例如,金属车)的第1时间序列亮度信号B1的处理例的图。例如为在如图13B所示的状况下得到的信号。纵轴表示时间序列亮度信号的亮度值,横轴表示距离。即,横轴用以光速换算的距离表示从激光器发光起的经过时间。从左侧起依次示出第1时间序列亮度信号B1、第2时间序列亮度信号B2以及第3时间序列亮度信号B3。第1时间序列亮度信号B1例如为在如图13B所示的状况下得到的信号。另外,短距离侧的信号为基于来自镜面状的测量对象10的反射光L2的第3时间序列亮度信号B3,长距离侧的信号为基于来自本车的反射光L2的第3时间序列亮度信号B3。 如图15C所示,第1时间序列亮度信号B1的上升表示更平稳的曲线形。该鼓起状的曲线形由来自镜面的反射光造成。波峰部分是由映射到镜面的例如本车的反射光和杂散光造成的。通常,前者的鼓起为想要测量的对象,但在以往的只是求出波峰的测量方法中,看漏的可能性变高。相对于此,关于上升的期间,使用前述(3)式来生成第2时间序列亮度信号B2,关于下降的期间,使用前述(2)式来生成第2时间序列亮度信号B2。在从第1时间序列亮度信号B1减去该第2时间序列亮度信号B2而生成第3时间序列亮度信B3的情况下,能够防止看漏来自镜面的反射光。 图15D是概念性地示出寄生电阻、电容的影响更大的情况下的第1时间序列亮度信号B1的处理例的图。纵轴表示时间序列亮度信号的亮度值,横轴表示距离。即,横轴用以光速换算的距离表示从激光器发光起的经过时间。从左侧起依次示出第1时间序列亮度信号B1、第2时间序列亮度信号B2以及第3时间序列亮度信号B3。 如图15D所示,在第1时间序列亮度信号B1进一步受到寄生电阻、电容的影响的情况下,成为波峰部分不尖锐而变钝的曲线的形状。在该情况下,使用(1)~(3)式而生成的信号关于变钝这点,与实际的信号不同。因而,代替使用(1)~(3)式,原信号生成电路24b将第1时间序列亮度信号B1的平缓部分的区域切出,作为第3时间序列亮度信B3而生成。更具体而言,原信号生成电路24b检测波峰,作为第2时间序列亮度信号B2而生成从波峰的跟前的波谷至接下来的波峰的跟前的波谷为止的区间的信号串。能够利用第1时间序列亮度信号B1的时间1次微分值、2次微分值来计算波谷的位置。例如波峰的跟前的2次微分值的最大值点对应于波谷部。由此,能够将第1时间序列亮度信号B1的变钝的信号全部除掉,生成基于对象物的反射光的第3时间序列亮度信B3。但是,仅将从波峰的跟前的波谷至接下来的波谷为止的区间切出,所以平缓部分的顶端的扩展不被去除而残留,呈现第3时间序列亮度信B3的波峰变高的趋势。改善其的处理例为图15E所示的例子。此外,一般而言,在信号中有电噪声等所致的小的凸凹。这样的小的凸凹不是检测对象的波峰、波谷,所以采取用于不检测其的对策(例如,忽略某个阈值以内的仅1次的增减等)。 图15E是概念性地示出第1时间序列亮度信号B1的平缓部分的顶端区域的处理例的图。纵轴表示时间序列亮度信号的亮度值,横轴表示距离。即,横轴用以光速换算的距离表示从激光器发光起的经过时间。从左侧起依次示出第1时间序列亮度信号B1、第2时间序列亮度信号B2以及第3时间序列亮度信号B3。 原信号生成电路24b使平缓部分的顶端的扩展的部分、即三角形状区域也包含于第2时间序列亮度信号B2。由此,三角形状区域的信号也从第1时间序列亮度信号B1被减去,第3时间序列亮度信B3的波峰的高度成为更准确的值。由此,能够进行更合适的测定。波峰的高度还用于可靠度的计算,要求更高的精度。 图16是概念性地示出校正电路24c的处理例的图。左图的纵轴表示时间序列亮度信号的亮度值,中图的纵轴表示时间序列系数的系数值,右图的纵轴表示时间序列亮度信号的亮度值。横轴表示距离。即,横轴用以光速换算的距离表示从激光器发光起的经过时间。 如图16所示,校正电路24c将时间序列的系数与第3时间序列亮度信号B3相乘,生成新的第3时间序列亮度信号B3’。即,校正电路24c在从第1时间序列亮度信号B1减去第2时间序列亮度信号B2之后,乘以时间序列的系数,生成第3时间序列亮度信号B3’。由此,能够校正通过与第2时间序列亮度信号B2重叠而产生的第3时间序列亮度信号B3的非线性的失真。 图17是示出本实施方式的距离测量装置5的处理例的流程图。在此,说明由信号生成电路20生成第1时间序列亮度信号B1之后的处理。 信号处理电路22从信号生成电路20获取第1时间序列亮度信号B1(步骤S100)。接着,滤波器电路24a进行降低第1时间序列亮度信号B1的噪声的滤波处理(步骤S102)。 接下来,原信号生成电路24b判定在第1时间序列亮度信号B1中是否产生堆集(步骤S104)。原信号生成电路24b在判定为未产生堆集的情况(步骤S104的否)下,生成基于第1时间序列亮度信号B1的峰值的第2时间序列亮度信号B2(步骤S106)。接着,原信号生成电路24b从第1时间序列亮度信号B1减去第2时间序列亮度信号B2,生成第3时间序列亮度信号B3(步骤S108)。 另一方面,原信号生成电路24b在判定为产生堆集的情况(步骤S104的是)下,原信号生成电路24b生成基于预定值的非对称的时间序列亮度信号B2(步骤S110)。接着,原信号生成电路24b从预定值以下的第1时间序列亮度信号B1减去第2时间序列亮度信号B2,生成第3时间序列亮度信号B3(步骤S112)。 接下来,校正电路24c将时间序列的系数与第3时间序列亮度信号B3相乘,生成新的第3时间序列亮度信号B3’(步骤S114)。然后,测量处理电路26根据第3时间序列亮度信号B3’,生成距测量对象10的距离值(步骤S116)。 如上那样,根据本实施方式的本距离测量装置5,信号处理电路22生成从第1时间序列亮度信号B1减去与基于激光的杂散光相应的第2时间序列亮度信号B2而得到的第3时间序列亮度信号B3。由此,在产生杂散光的情况下,也能够降低杂散光的影响,能够以更高精度进行距测量对象物10的距离测定。 (第2实施方式) 第2实施方式的距离测量装置5与第1实施方式的距离测量装置5不同的点在于在对使多个方向照射的激光L1的反射光L2数字化后的多个第1时间序列亮度信号B1进行累计之后生成第3时间序列亮度信号B3。以下,说明与第1实施方式的距离测量装置5不同的点。 图18是示出第2实施方式的信号处理电路22的结构的框图。如图18所示,第2实施方式的累计处理电路24d根据存储于存储电路21的使向第1照射方向照射的激光L1的反射光L2数字化后的第1时间序列亮度信号B11与使向与第1照射方向不同的第n照射方向照射的激光L1的反射光L2数字化后的第1时间序列亮度信号B1n的类似性,生成第1时间序列亮度信号B1n的权重值。n为2至N的自然数。然后,累计处理电路24d使以权重值对第1时间序列亮度信号B1n进行加权后的信号累积于第1时间序列亮度信号B11,生成第1时间序列亮度信号B1。此外,也可以使第1时间序列亮度信号B1的大小标准化。 图19是示出第2实施方式的距离测量装置5的处理例的流程图。在此,说明对5×5的坐标范围的第1时间序列亮度信号B1n进行累计的例子。即,n为1~25。 信号处理电路22从存储电路21获取第1时间序列亮度信号B11~第1时间序列亮度信号B125(步骤S200)。接着,累计处理电路24d使对第1时间序列亮度信号B12~第1时间序列亮度信号B125分别以权重值进行加权后的信号累积于第1时间序列亮度信号B11,生成第1时间序列亮度信号B1。(步骤S202)。接下来,信号处理电路22进行与步骤S102至S116(图17)等同的处理。这样,信号处理电路22对多个第1时间序列亮度信号B1n实施平均化处理,生成第1时间序列亮度信号B1。 如上那样,根据本实施方式的距离测量装置5,累计处理电路24d使以权重值进行加权后的第1时间序列亮度信号B1n累积于第1时间序列亮度信号B11,生成第1时间序列亮度信号B1。由此,能够从降低噪声的第1时间序列亮度信号B1生成抑制了由杂散光产生的时间序列亮度信号的影响的第3时间序列亮度信号B3。因此,能够根据第3时间序列亮度信号B3的波峰位置的定时与激光的照射定时的时间差,抑制噪声的影响,精度更良好地且稳定地测量距测量对象物10的距离。 (第2实施方式的第1变形例) 第2实施方式的第1变形例的距离测量装置5与第2实施方式的距离测量装置5不同的点在于针对使向多个方向照射的激光L1的反射光L2数字化后的多个第1时间序列亮度信号B1n分别生成第3时间序列亮度信号B3n,对这些第3时间序列亮度信号B3n进行累计,生成第3时间序列亮度信号B3。以下,说明与第2实施方式的距离测量装置5不同的点。 图20是示出第2实施方式的第1变形例的距离测量装置5的处理例的流程图。在此,说明生成5×5的坐标范围的第1时间序列亮度信号B1n至第3时间序列亮度信号B3n的例子。即,n为1~25。 信号处理电路22从存储电路21获取第1时间序列亮度信号B11~第1时间序列亮度信号B125(步骤S300)。接着,信号处理电路22对第1时间序列亮度信号B11~第1时间序列亮度信号B125分别进行与步骤S102至S114(图17)等同的处理。由此,生成第3时间序列亮度信号B31~第3时间序列亮度信号B325。累计处理电路24d根据第3时间序列亮度信号B31与第3时间序列亮度信号B3n的类似性,生成第3时间序列亮度信号B3n的权重值。n为2至25的自然数。 累计处理电路24d使针对第3时间序列亮度信号B31~第1时间序列亮度信号B325分别以权重值进行加权后的信号累积于第3时间序列亮度信号B31,生成第3时间序列亮度信号B3(步骤S302)。然后,测量处理电路26根据第3时间序列亮度信号B3,生成距测量对象10的距离值(步骤S116)。 这样,信号处理电路22针对多个第1时间序列亮度信号B11~第1时间序列亮度信号B125分别生成多个第3时间序列亮度信号B31~第1时间序列亮度信号B325,针对多个第3时间序列亮度信号B31~第1时间序列亮度信号B325而实施平均化处理,生成第3时间序列亮度信号B3。一般而言,在进行去掉第2时间序列信号进而运算第1时间序列亮度信号B1的时间微分来求出波峰的平缓部分而去掉这样的处理(例如图15D,E)而得到的时间序列亮度信号中,呈现产生基于噪声的伪波峰的趋势。但是,基于这样的噪声的信号能够通过平均化处理有效地抑制,所以如本变形例那样,持续进行原信号生成及校正和累计(平均化)处理,从而能够生成更高精度的第3时间序列亮度信号B3。 如上那样,根据本变形例的距离测量装置5,累计处理电路24d使以权重值进行加权后的第3时间序列亮度信号B1n累积于第3时间序列亮度信号B31,生成第3时间序列亮度信号B3。由此,能够根据抑制了由杂散光产生的时间序列亮度信号的影响的多个第3时间序列亮度信号B31~第1时间序列亮度信号B325,生成降低了噪声的第3时间序列亮度信号B3。因此,能够根据第3时间序列亮度信号B3的波峰位置的定时与激光的照射定时的时间差,抑制噪声的影响,精度更良好地且稳定地测量距测量对象物10的距离。 (第2实施方式的变形例2) 第2实施方式的变形例2的距离测量装置5与第2实施方式的距离测量装置5不同的点在于在对使向同一方向照射多次的激光L1的反射光L2数字化后的多个第1时间序列亮度信号B1n进行累计之后生成第3时间序列亮度信号B3。以下,说明与第2实施方式的距离测量装置5不同的点。 图21是示出第2实施方式的变形例2的距离测量装置5的处理例的流程图。在此,说明对使向同一方向照射5次的激光L1的反射光L2数字化后的第1时间序列亮度信号B1n进行累计的例子。即,n为1~5。 信号处理电路22从存储电路21获取第1时间序列亮度信号B11~第1时间序列亮度信号B15(步骤S400)。接着,累计处理电路24d使对第1时间序列亮度信号B11~第1时间序列亮度信号B15分别以权重值进行加权后的信号累积,生成第3时间序列亮度信号B3(步骤S402)。接下来,信号处理电路22进行与步骤S102至S116(图17)等同的处理。这样,信号处理电路22对与在不同的多个定时照射的激光L1分别对应的多个第1时间序列亮度信号B1n实施平均化处理,生成第1时间序列亮度信号B1。 如上那样,根据本变形例的距离测量装置5,累计处理电路24d对与在不同的多个定时向同一方向照射的激光L1分别对应的多个第1时间序列亮度信号B1n实施平均化处理,生成第1时间序列亮度信号B1。由此,能够从降低了噪声的第1时间序列亮度信号B1生成抑制了由杂散光产生的时间序列亮度信号的影响的第3时间序列亮度信号B3。因此,能够根据第3时间序列亮度信号B3的波峰位置的定时与激光的照射定时的时间差,不被噪声影响,而精度良好地且稳定地测量距测量对象物10的距离。 (第2实施方式的第3变形例) 第2实施方式的第3变形例的距离测量装置5与第2实施方式的距离测量装置5不同的点在于针对使向同一方向照射多次的激光L1的反射光L2数字化后的多个第1时间序列亮度信号B1n分别生成第3时间序列亮度信号B3n,对这些第3时间序列亮度信号B3n进行累计,生成第3时间序列亮度信号B3。以下,说明与第2实施方式的距离测量装置5不同的点。 图22是示出第2实施方式的第3变形例的距离测量装置5的处理例的流程图。在此,说明从使向同一方向照射5次的激光L1的反射光L2数字化后的第1时间序列亮度信号B1n生成第3时间序列亮度信号B3n的例子。即,n为1~5。 信号处理电路22从存储电路21获取第1时间序列亮度信号B11~第1时间序列亮度信号B15(步骤S500)。接着,信号处理电路22针对第1时间序列亮度信号B11~第1时间序列亮度信号B125分别进行与步骤S102至S114(图17)等同的处理。由此,生成第3时间序列亮度信号B31~第1时间序列亮度信号B35。 接下来,累计处理电路24d使对第3时间序列亮度信号B31~第3时间序列亮度信号B35分别以权重值进行加权后的信号累积,生成第3时间序列亮度信号B3(步骤S502)。然后,测量处理电路26根据第3时间序列亮度信号B3,生成距测量对象10的距离值(步骤S116)。这样,信号处理电路22针对多个第1时间序列亮度信号B11~第1时间序列亮度信号B15分别生成多个第3时间序列亮度信号B31~第1时间序列亮度信号B35,对多个第3时间序列亮度信号B31~第1时间序列亮度信号B35实施平均化处理,生成第3时间序列亮度信号B3。 如上那样,根据本变形例的距离测量装置5,累计处理电路24d使多个第3时间序列亮度信号B31~第1时间序列亮度信号B35累积,生成第3时间序列亮度信号B3。由此,能够根据抑制了由杂散光产生的时间序列亮度信号的影响的多个第3时间序列亮度信号B31~第1时间序列亮度信号B35,生成降低了噪声的第3时间序列亮度信号B3。因此,能够根据第3时间序列亮度信号B3的波峰位置的定时与激光的照射定时的时间差,不被噪声影响而精度良好地且稳定地测量距测量对象物10的距离。 说明了本发明的几个实施方式,但这些实施方式是作为例子而提示的,未意图限定发明的范围。这些新的实施方式能够以其它各种方式被实施,能够在不脱离发明的要旨的范围进行各种省略、置换、变更。这些实施方式及其变形包含于发明的范围、要旨,并且包含于专利权利要求书所记载的发明及与其均等的范围。
- 距离测量装置、摄像装置、距离测量系统、距离测量方法和摄像方法
- 距离测量装置、距离测量系统、距离测量方法和程序