一种中药自动加工机器人
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及中药领域,具体来说,涉及一种中药自动加工机器人。
背景技术
随着当前经济的不断发展,人们对生活水平的要求也不断提高,大多数人进入中年后就会对中药养生产生很大的兴趣,中药的使用在生活中处处可见。如今需要熬制的中药抓取方式还停留在药剂师逐量称取上,而一位用户大多需要多包中药,每包中药又需要十几种不同的药材,这样称取一位用户的药就需要很多繁琐的称重次数,耗费很长时间,这样传统的中药称取方式效率太低,导致中药取药处排队人群数量太多。
发明内容
本发明的目的在于提供一种中药自动加工机器人,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种中药自动加工机器人,其特征在于,在药柜(1)上固设有药盒板(2),所述药盒板(2)分为若干竖向排设置,所述药盒板(2)上固设有药盒(3),所述药柜(1)内顶端和所述药盒板(2)底端均固设有第一伸缩电机(4);
所述药盒(3)底端为开口状,且所述药盒(3)底端设有密封板(7),所述药盒(3)上安装有驱动所述密封板(7)的第一转动电机(8);所述药柜(1)上分别安装有第二转动电机(9)和轴承(10),所述第二转动电机(9)的输出端连接有丝杆(11),所述丝杆(11)另一端连接轴承(10),所述第二转动电机(9)底端和所述轴承(10)底端均固设有竖板,所述竖板之间固设有牵引杆(12);所述丝杆(11)上螺旋套设有移动板(13),所述移动板(13)底部活套在所述牵引杆(12)上,所述移动板(13)外壁上安装有称重盘(14);所述称重盘(14)下端为开口状,所述称重盘(14)底端设有副密封板(15),所述移动板(13)上安装有驱动所述副密封板(15)的第二伸缩电机(16);所述药柜(1)外壁两侧均固设有导药筒(17),所述导药筒(17)上开设有供所述称重盘(14)和所述副密封板(15)穿进的穿口;
所述导药筒(17)底端均设有包装机构,该包装机构包括包装袋放置框(18),所述包装袋放置框(18)内分布设有隔板(19),所述隔板(19)之间通过连接杆(20)进行连接,相邻的所述隔板(19)之间形成包装袋放置空腔;所述包装袋放置框(18)上穿设有第三伸缩电机(21)的输出端,所述第三伸缩电机(21)的输出端固设有推动板(22),所述推动板(22)上与所述隔板(19)连接;
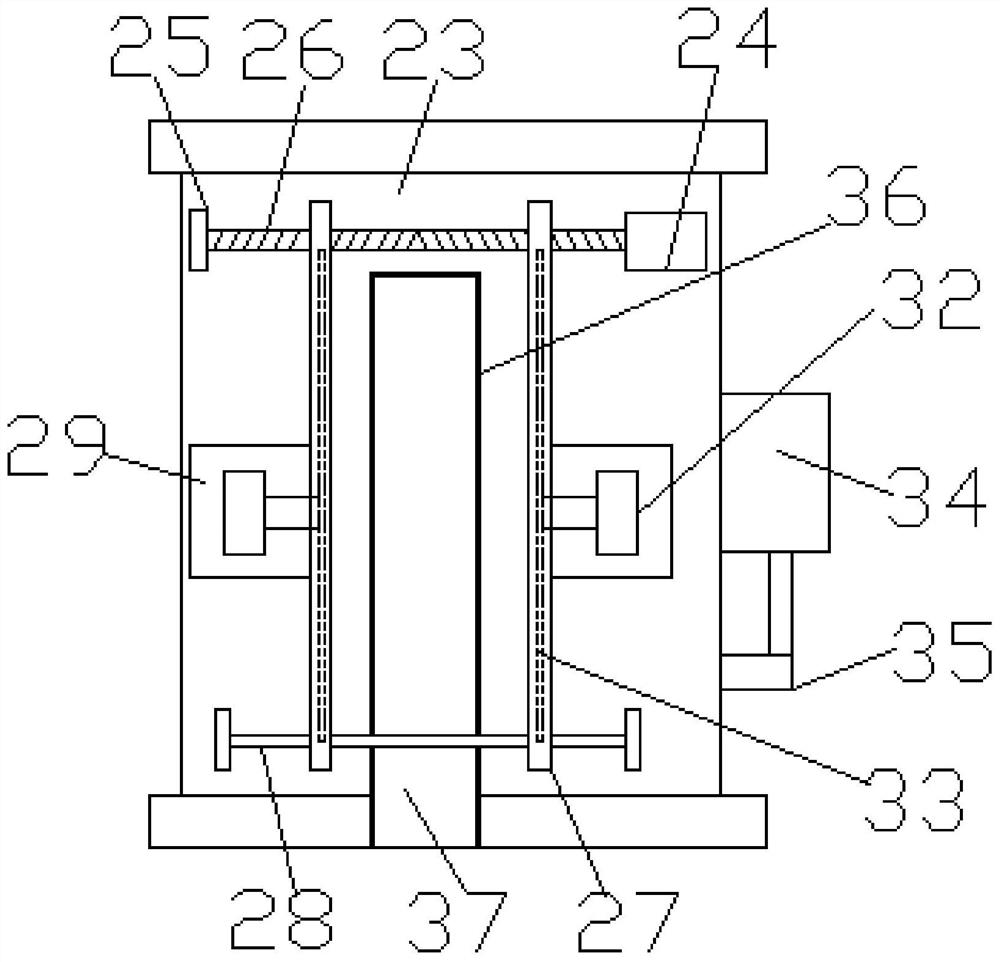
所述包装袋放置框(18)一侧底部设有包装撑开机构,所述包装撑开机构包括工作台(23),所述工作台(23)位于所述包装袋放置框(18)一侧底部设置,所述工作台(23)上分别设有第三转动电机(24)和副轴承(25);所述第三转动电机(24)的输出端连接有副丝杆(26),所述副丝杆(26)另一端连接所述副轴承(25),所述副丝杆(26)上螺旋套设有相反的数量为两个的副移动板(27);所述工作台(23)上固设有工型板(28),所述副移动板(27)底部活套在所述工型板(28)上,所述副移动板(27)相互远离的外侧壁上固设有气泵(29),所述气泵(29)通过管道与所述副移动板(27)连接;所述副移动板(27)内部为空腔状,所述副移动板(27)相对应的一侧面上均匀分布设有吸附孔,所述包装袋放置空腔之间放置有包装袋(30),所述包装袋(30)内侧顶部设有袋口密封相扣条(31);所述气泵(29)顶端均安装有第四伸缩电机(32),所述第四伸缩电机(32)的输出端均固设有袋口挤压板(33),所述袋口挤压板(33)位于所述副移动板(27)内部,所述副移动板(27)上开设有供所述袋口挤压板(33)放置的放置槽;所述工作台(23)底端固设有第五伸缩电机(34),所述第五伸缩电机(34)输出端固设有固定板(35),所述工作台(23)开设有支撑槽(36),所述支撑槽(36)内放置有支撑板(37),所述固定板(35)一端与所述支撑板(37)底端固定连接,所述药柜(1)底部下方设有传送机(47);
所述传送机(47)的落料端下方设有与所述包装机构和所述包装撑开机构相同结构的副包装机构和副包装撑开机构。
在本案中,所述药盒(3)上安装有探测器(6),所述药柜(1)外壁底端固定有与所述探测器(6)相匹配的上料机构;所述上料机构包括第四转动电机(38)和第二副轴承(39),所述第四转动电机(38)的输出端连接有第二副丝杆(40),所述第二副丝杆(40)另一端连接所述第二副轴承(39),所述第四转动电机(38)底端和所述第二副轴承(39)底端均固设有第二副竖板,所述第二副竖板之间固设有副牵引杆(41);所述第二副丝杆(40)上螺旋套设有第二副移动板(42),所述第二副移动板(42)底部活套在所述副牵引杆(41)上,所述第二副移动板(42)外侧壁固设有第六伸缩电机(43);所述第六伸缩电机(43)输出顶端侧壁上固设有第七伸缩电机(44),所述第七伸缩电机(44)的输出端上安装有第五转动电机(45),所述第五转动电机(45)的输出端上设有药框(46)。
在本案中所述第一伸缩电机(4)的输出底端均固定设有防尘盖板(5),所述防尘盖板(5)内部为空腔状,且所述防尘盖板(5)底部开设有若干个出气口,所述烘干机(50)通过管道与所述防尘盖板(5)内部相通连接。
在本案中,所述传送机(47)上设有自带一体的传送带,所述传送机(47)底端安装有传送机支撑腿。
在本案中,所述副支撑腿(49)底端固设有橡胶材质的防滑垫(51)。
在本案中,所述防尘盖板(5)顶部开设有放置所述烘干机(50)的烘干机槽。
本发明的益效果:
本发明使用时药材都是分别区分放置在药盒,平时通过第一伸缩电机带动防尘盖板进行下降,使其防尘盖板底端接触在药盒顶面,防止灰尘进入药盒内,污染药盒内的药材;需要抓药时,根据机器人获取的病人的中药配方开始一付一付地进行抓药,通过第二转动电机带动丝杆进行转动,轴承保证丝杆转动稳定性,最终带动移动板在丝杆上进行移动,牵引杆使其移动板在丝杆上正常进行移动,防止移动板在丝杆上产生自转,移动板带动称重盘进行同步移动,使其称重盘移动至对应的药盒底部下方,然后第一转动电机带动密封板进行转动,使其药盒底部开口漏出,便于药盒内的药材掉在称重盘上;当达到需要的重量之后第一转动电机再次转动使其密封板堵住药盒底部开口,然后再次控制移动板进行移动,移动板和密封板共同移动,直至移动板和密封板穿过导药筒上的穿口,移动板和密封板一起移动进入导药筒内,控制第二伸缩电机带动副密封板移动,使其称重盘漏出开口状,最终药材进入导药筒内;进入导药筒底部为开口状,包装袋放置框内分布设有隔板,在相邻的隔板之间放置包装袋,通过第三伸缩电机带动推动板连接的隔板进行移动,使其隔板慢慢且头部的隔板移动包装袋放置框外,最终头部的两个隔板之间的放置包装袋掉落在工作台上,然后整体的隔板再次移动回包装袋放置框内,第三转动电机带动两个副移动板做相互远离或者相互靠近运动。两个副移动板相互靠近,两个副移动板紧贴放置包装袋两侧,然后气泵进行吸气,副移动板内部为空腔状,最终通过副移动板相对应的一侧面上的吸附孔进行吸附包装袋的两侧,然后两个副移动板相互远离,最终带动包装袋的袋口进行打开,导药筒底部为开口状,落料时药材最终掉进包装袋内;完成后,第四伸缩电机带动两个袋口挤压板进行相互靠近,最终使其袋口挤压板进行压合在一起,使其袋口的密封,包装袋内侧顶部设有袋口密封相扣条,袋口密封相扣条就是传统的密封粘胶条,袋口挤压板挤压袋口密封相扣条,使其袋口的密封,完成后,第五伸缩电机带动固定板上的支撑板进行移动,使其支撑板移出支撑槽内,再松开袋口挤压板和副移动板,气泵可以停止工作,最终包装袋掉落在传送机进行传送走,两个导药筒加快了抓药的工作效率;注意的是,最下方的药盒板底端不需要设置第一伸缩电机。
附图说明
图1是本发明的主视图;
图2是本发明的药柜示意图;
图3是本发明的移动板示意图;
图4是本发明的包装袋放置框示意图;
图5是本发明的包装袋示意图;
图6是本发明的工作台示意图;
图7是本发明药框示意图;
图8是本发明的防尘盖板示意图。
具体实施方式
下面,结合附图以及具体实施方式,对发明做出进一步的描述:
实施例一:
请参阅图1-8,本发明,包括药柜1,所述药柜1上固设有一体成型的药盒板2,所述药盒板2分为若干竖向排设置,所述药盒板2上固设有药盒3,所述药柜1内顶端和所述药盒板2底端均固设有第一伸缩电机4,所述第一伸缩电机4的输出底端均固设有防尘盖板5,所述药盒3上均安装有探测器6,所述药盒3底端为开口状,且所述药盒3底端设有密封板7,所述药盒3上安装有驱动所述密封板7的第一转动电机8,所述药柜1上分别安装有第二转动电机9和轴承10,所述第二转动电机9的输出端连接有丝杆11,所述丝杆11另一端连接轴承10,所述第二转动电机9底端和所述轴承10底端均固设有竖板,所述竖板之间固设有牵引杆12,所述丝杆11上螺旋套设有移动板13,所述移动板13底部活套在所述牵引杆12上,所述移动板13外壁上安装有称重盘14,所述称重盘14下端为开口状,所述称重盘14底端设有副密封板15,所述移动板13上安装有驱动所述副密封板15的第二伸缩电机16,所述药柜1外壁底端固定安装有与所述探测器6相匹配的上料机构,所述药柜1外壁两侧均固设有导药筒17,所述导药筒17上开设有供所述称重盘14和所述副密封板15穿进的穿口,所述导药筒17底端均设有包装机构,所述包装机构包括包装袋放置框18,所述包装袋放置框18内分布设有隔板19,所述隔板19之间通过连接杆20进行连接,相邻的所述隔板19之间形成包装袋放置空腔,所述包装袋放置框18上穿设有第三伸缩电机21的输出端,所述第三伸缩电机21的输出端固设有推动板22,所述推动板22上与所述隔板19连接,所述包装袋放置框18一侧底部设有包装撑开机构,所述包装撑开机构包括工作台23,所述工作台23位于所述包装袋放置框18一侧底部设置,所述工作台23上分别设有第三转动电机24和副轴承25,所述第三转动电机24的输出端连接有副丝杆26,所述副丝杆26另一端连接所述副轴承25,所述副丝杆26上螺旋套设有相反的数量为两个的副移动板27,所述工作台23上固设有工型板28所述副移动板27底部活套在所述工型板28上,所述副移动板27相互远离的外侧壁上固设有气泵29,所述气泵29通过管道与所述副移动板27连接,所述副移动板27内部为空腔状,所述副移动板27相对应的一侧面上均匀分布设有吸附孔,所述包装袋放置空腔之间放置有包装袋30,所述包装袋30内侧顶部设有袋口密封相扣条31,所述气泵29顶端均安装有第四伸缩电机32,所述第四伸缩电机32的输出端均固设有袋口挤压板33,所述袋口挤压板33位于所述副移动板27内部,所述副移动板27上开设有供所述袋口挤压板33放置的放置槽,所述工作台23底端固设有第五伸缩电机34,所述第五伸缩电机34输出端固设有固定板35,所述工作台23开设有支撑槽36,所述支撑槽36内放置有支撑板37,所述固定板35一端与所述支撑板37底端固定连接,所述药柜1底部下方设有传送机47。
实施例二:
请参阅图1和图7,对于上料机构来说,所述上料机构包括第四转动电机38和第二副轴承39,所述第四转动电机38的输出端连接有第二副丝杆40,所述第二副丝杆40另一端连接所述第二副轴承39,所述第四转动电机38底端和所述第二副轴承39底端均固设有第二副竖板,所述第二副竖板之间固设有副牵引杆41,所述第二副丝杆40上螺旋套设有第二副移动板42,所述第二副移动板42底部活套在所述副牵引杆41上,所述第二副移动板42外侧壁固设有第六伸缩电机43,所述第六伸缩电机43输出顶端侧壁上固设有第七伸缩电机44,所述第七伸缩电机44的输出端上安装有第五转动电机45,所述第五转动电机45的输出端上设有药框46。
通过本发明的上述方案,有益效果:工作时,如果当探测器6检测到药盒3内的草药不够时,第四转动电机38带动第二副丝杆40进行转动,第二副移动板42在第二副丝杆40上进行移动,然后第六伸缩电机43带动第七伸缩电机44进行向上移动,然后第七伸缩电机44带动第五转动电机45进行靠近药盒3移动,最终药框46对应药盒3顶部,防尘盖板5打开,最终通过第五转动电机45转动药框46,使其药框46产生倾斜,药框46内的补充药材掉进药盒3内。本实施例的其余结构与实施例1完全相同,在此不做赘述。
实施例三:
请参阅图4,对于包装袋放置框18来说,所述包装袋放置框18和所述工作台23侧壁均固设有支撑腿48。本实施例的其余结构与实施例1完全相同,在此不做赘述。
实施例四:
请参阅图1,对于药柜1来说,所述药柜1底端固设有若干个副支撑腿49,所述传送机47穿过所述副支撑腿49设置。本实施例的其余结构与实施例1完全相同,在此不做赘述。
实施例五:
请参阅图8,对于防尘盖板5来说,所述防尘盖板5顶端均固设有烘干机50。本实施例的其余结构与实施例1完全相同,在此不做赘述。
实施例六:
请参阅图8,对于防尘盖板5来说,所述防尘盖板5内部为空腔状,且所述防尘盖板5底部开设有若干个出气口,所述烘干机50通过管道与所述防尘盖板5内部相通连接。本实施例的其余结构与实施例1完全相同,在此不做赘述。
实施例七:
请参阅图1,对于传送机47来说,所述传送机47的落料端下方设有与所述包装机构和所述包装撑开机构相同结构的副包装机构和副包装撑开机构。本实施例的其余结构与实施例1完全相同,在此不做赘述。
通过本发明的上述方案,有益效果:传送机47的落料端下方设有与包装机构和包装撑开机构相同结构的零件,也是在传送机47的落料端下方设有同样的副包装机构和副包装撑开机构,注意的是,该传送机47的落料端下方的副包装机构,内部的包装袋为大包装袋,最终包装袋30掉落进入大包装袋内,进行收集工作,传送机47的落料端下方的副包装机构和副包装撑开机构不再进行描述,具体结构与主权的包装机构和包装撑开机构设计零件为一致,区别在于传送机47的落料端下方的副包装机构,该机构内的包装袋为大包装袋。
实施例八:
请参阅图1,对于副支撑腿49来说,所述副支撑腿49底端固设有橡胶材质的防滑垫51。本实施例的其余结构与实施例1完全相同,在此不做赘述。
通过本发明的上述方案,有益效果:副支撑腿49底端固设有橡胶材质的防滑垫51,防滑垫51对其整体装置起到一定的支撑防滑效果。
实施例九:
请参阅图1,对于传送机47来说,所述传送机47上设有自带一体的传送带,所述传送机47底端安装有传送机支撑腿。本实施例的其余结构与实施例1完全相同,在此不做赘述。
实施例十:
请参阅图8,对于防尘盖板5来说,所述防尘盖板5顶部开设有放置所述烘干机50的烘干机槽。本实施例的其余结构与实施例1完全相同,在此不做赘述。
通过本发明的上述方案,有益效果:防尘盖板5顶部开设有放置所述烘干机50的烘干机槽,因此减小设计的体积。
在实际应用时,药材都是分别区分放置在药盒3,平时,通过设置的第一伸缩电机4带动防尘盖板5进行下降,使其防尘盖板5底端接触在药盒3顶面,实现防尘的效果,防止灰尘进入药盒3内,污染药盒3内的药材,需要抓药的时候,根据机器人获取的病人的中药配方开始一付一付地进行抓药,通过第二转动电机9带动丝杆11进行转动,轴承10的设置保证丝杆11转动的稳定性,最终带动移动板13在丝杆11上进行移动,牵引杆12的设置,使其移动板13在丝杆11上正常进行移动,防止移动板13在丝杆11上产生自转,移动板13带动称重盘14进行同步移动,使其称重盘14移动至对应的药盒3底部下方,然后第一转动电机8带动密封板7进行转动,使其药盒3底部开口漏出,便于药盒3内的药材掉在称重盘14上,当达到需要的重量之后第一转动电机8再次转动使其密封板7堵住药盒3底部开口,然后再次控制移动板13进行移动,移动板13和密封板15共同移动,直至移动板13和密封板15穿过导药筒17上的穿口,移动板13和密封板15一起移动进入导药筒17内,控制第二伸缩电机16带动副密封板15移动,使其称重盘14漏出开口状,最终药材进入导药筒17内,注意的是,进入导药筒17底部为开口状,包装袋放置框18内分布设有隔板19,在相邻的隔板19之间放置包装袋30,通过第三伸缩电机21带动推动板22连接的隔板19进行移动,使其隔板19慢慢且头部的隔板19移动包装袋放置框18外,最终头部的两个隔板19之间的放置包装袋30掉落在工作台23上,且位于两个副移动板27之间,然后整体的隔板19再次移动回包装袋放置框18内,第三转动电机24带动两个副移动板27做相互远离或者相互靠近运动,该设计,两个副移动板27相互靠近,两个副移动板27紧贴放置包装袋30两侧,然后气泵29进行吸气,副移动板27内部为空腔状,最终通过副移动板27相对应的一侧面上的吸附孔进行吸附包装袋30的两侧,然后两个副移动板27相互远离,最终带动包装袋30的袋口进行打开,导药筒17底部为开口状,进行落料,药材最终掉进包装袋30内,完成后,第四伸缩电机32带动两个袋口挤压板33进行相互靠近,最终使其袋口挤压板33进行压合在一起,使其袋口的密封,包装袋30内侧顶部设有袋口密封相扣条31,袋口密封相扣条31就是传统的密封粘胶条,袋口挤压板33挤压袋口密封相扣条31,使其袋口的密封,完成后,第五伸缩电机34带动固定板35上的支撑板37进行移动,使其支撑板37移出支撑槽36内,再松开袋口挤压板33和副移动板27,气泵29可以停止工作,最终包装袋30掉落在传送机47进行传送走,两个导药筒17,从而加快了抓药的工作效率,注意的是,最下方的药盒板2底端不需要设置第一伸缩电机4。
- 一种中药自动加工机器人
- 一种中药自动加工机器人