一种用于方位识别的皮肤听声手表及方位识别方法
文献发布时间:2023-06-19 12:04:09
技术领域
本发明属于皮肤听声装置技术领域,涉及一种用于方位识别的皮肤听声手表,还涉及上述皮肤听声手表的方位识别方法。
背景技术
世界卫生组织披露全球大约有4.66亿人患有残疾性听力损失,据估计,到2050年将有9亿多人出现残疾性听力损失。而我国是世界上听力残疾人数最多的国家,听力残疾人约2780万人,占全国残疾人的30%以上。生活中,大多数听力障碍者采用药物治疗、手术植入人工耳蜗、佩戴助听器等方法来获得一定的康复效果,但是这些方法对于重度或者资金不充裕的人们来说有一定的限制。现在,皮肤听声是一种解决耳聋患者听觉问题的新技术,通过刺激人的皮肤,将声音信号传入大脑皮层,让听障者感知声音。现有的皮肤听声装置无法辨别声源方位。
发明内容
本发明的目的是提供一种基于方位识别的皮肤听声手表,解决了现有技术中存在的皮肤听声装置无法辨别声源方位的问题。
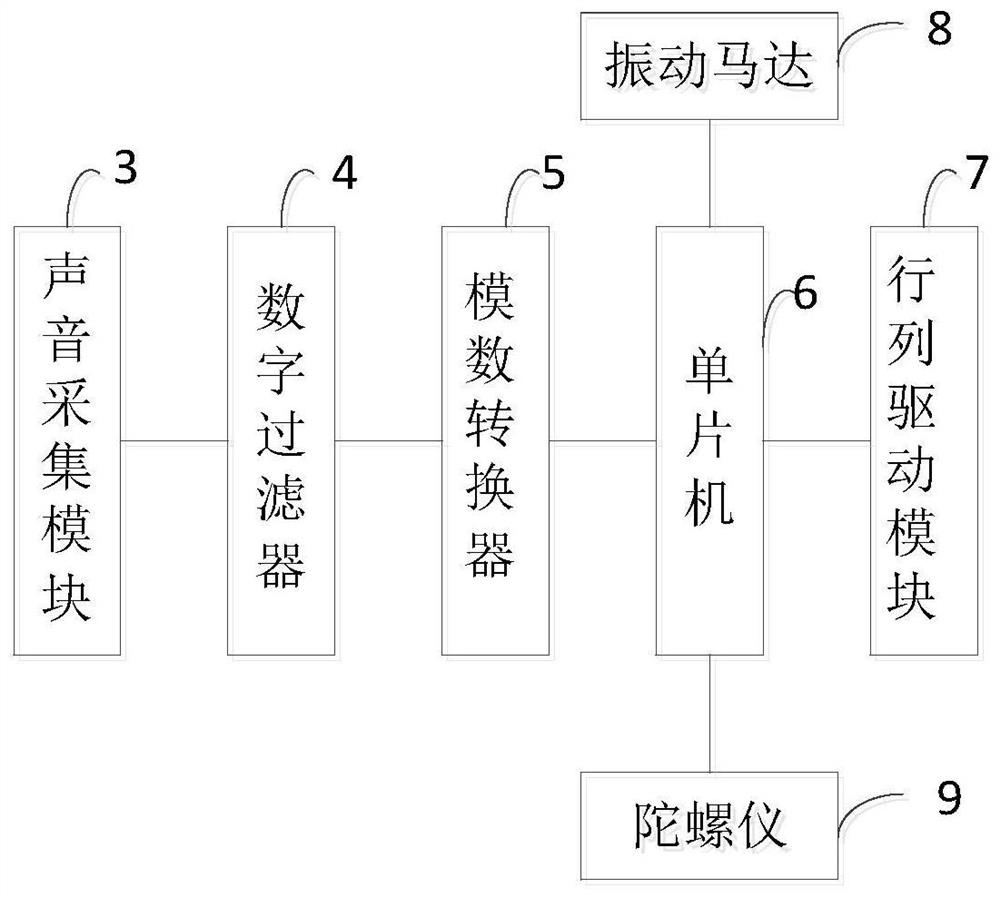
本发明所采用的技术方案是,一种用于方位识别的皮肤听声手表,包括表盘和表带,沿表盘周向设置有多个声音采集模块,声音采集模块依次连接有数字过滤器、模数转换器、单片机、行列驱动模块,单片机还分别连接有振动马达、陀螺仪,振动马达的数量与方位相对应;数字过滤器、模数转换器、单片机、行列驱动模块、振动马达、陀螺仪位于表盘内部;行列驱动模块连接有电流触针,电流触针自由端伸出振动马达表面。
本发明的特点还在于:
还包括有固定轴,固定轴分别通过弹性连接件与振动马达连接。
行列驱动模块包括行驱动模块和列驱动模块,行驱动模块包括芯片,芯片连接有PNP三极管,PNP三极管的地址接入线A、B、C、D连接单片机的P1.0、P1.1、P1.2、P1.3接口;列驱动模块包括第一列驱动模块、第二列驱动模块,第一列驱动模块的11号引脚与单片机的P3.1接口连接,第一列驱动模块的14号引脚与单片机的P3.0接口连接,第一列驱动模块的9号引脚与第二列驱动模块的14号引脚连接,第二列驱动模块9号脚悬空,第一列驱动模块、第二列驱动模块的13号引脚均接地,第一列驱动模块、第二列驱动模块的10号引脚与单片机的P1.5接口连接。
声音采集模块包括四个,四个声音采集模块分别位于表盘的四个方向。
本发明的另一目的是提供一种基于方位识别的皮肤听声手表的方位识别方法。
本发明所采用的另一技术方案是,一种基于方位识别的皮肤听声手表的方位识别方法,采用上述的用于方位识别的皮肤听声手表,包括以下步骤:
步骤1、声音采集模块采集不同方向的声音信号,声音信号以电流信号的形式经过数字过滤器滤除高频声波,然后模数转换器将电流信号转化为数字信号进入单片机中储存;
步骤2、单片机将信号传递至行列驱动模块,行列驱动模块对应驱动电流触针,使其产生电流刺激皮肤;
步骤3、单片机将信号传递至陀螺仪,陀螺仪确定手表姿态,并根据每个方位传输的电信号的强弱不同,指向声源的初步方位,并将方位信号反馈至单片机,控制对应方位的振动马达振动。
还包括,步骤4、单片机根据手表姿态及声音采集模块采集的声音信号进行主声源进行重构,获得每个方位主声源的电流斜率;然后增加电流斜率较大方位的振动马达振动频率。
本发明的有益效果是:
本发明一种用于方位识别的皮肤听声手表,通过触针进行预先提醒,再通过马达进行方位提醒,能使患者准确接收声源方位;不会引起任何副作用,适用于聋哑人长期使用,并且体积小,方便携带;本发明一种用于方位识别的皮肤听声手表的方位识别方法,通过声音和电信号之间的转化,引起人体皮肤对于振动信号的感知,帮助听障者辨别声源产生的方位。
附图说明
图1是本发明一种用于方位识别的皮肤听声手表的结构示意图;
图2是本发明一种用于方位识别的皮肤听声手表中振动马达的结构示意图;
图3是本发明一种用于方位识别的皮肤听声手表的原理图;
图4是本发明一种用于方位识别的皮肤听声手表中行列驱动模块的结构示意;
图5是本发明一种用于方位识别的皮肤听声手表中行列驱动模块的原理图;
图6是本发明一种用于方位识别的皮肤听声手表中PNP与行驱动模块连接示意图;
图7是本发明一种用于方位识别的皮肤听声手表中模数转换器的结构示意图;
图8是本发明一种用于方位识别的皮肤听声手表中刺激信号产生示意图。
图中:1.表盘,2.表带,3.声音采集模块,4.数字过滤器,5.模数转换器,6.单片机,7.行列驱动模块,701.行驱动模块,7011.芯片,7012.PNP三极管,702.列驱动模块,7021.第一列驱动模块,7022.第二列驱动模块,8.振动马达,9.陀螺仪,10.固定轴,11.散热孔,12.电流触针,13.分轴,14.信号线,15.弹性连接件。
具体实施方式
下面结合附图和具体实施方式对本发明进行详细说明。
一种用于方位识别的皮肤听声手表,如图1-3所示,包括表盘1和表带2,沿表盘1周向设置有多个声音采集模块3,声音采集模块3依次连接有数字过滤器4、模数转换器5、单片机6、行列驱动模块7,单片机6还分别连接有振动马达8、陀螺仪9,振动马达8包括四个,分别位于表盘1背面不同的方位(前、后、左、右四个方位);数字过滤器4、模数转换器5、单片机6、行列驱动模块7、振动马达8、陀螺仪9位于表盘1内部;行列驱动模块7连接有电流触针12,电流触针12一端为表盘1内部,与行列驱动模块7电性连接,另一端伸出振动马达8表面,振动马达8通过信号线14与单片机6连接。
本实施例中,单片机型号为AT89C52,模数转换器5的结构如图4所示。声音采集模块3为硅麦克风SMA120,声音采集模块3包括四个,四个声音采集模块3分别位于表盘1的四个方向,根据奈奎斯特采样定理(Fs>2*Fn,其中Fs为采样率,Fn为信号频率)对音频进行采样。
还包括有固定轴10,每个振动马达8中心位置设置有分轴13,固定轴10分别通过弹性连接件15与分轴13连接。弹性连接件可以为弹簧。表盘1背面还设置有散热孔11。
如图5-7所示,行列驱动模块7包括行驱动模块701和列驱动模块702,行驱动模块701包括74HC154芯片7011,芯片7011连接有PNP三极管7012,PNP三极管7012的地址接入线A、B、C、D连接单片机6的P1.0、P1.1、P1.2、P1.3接口;列驱动模块702包括第一列驱动模块7021、第二列驱动模块7022,第一列驱动模块7021、第二列驱动模块7022均为74HC595芯片,第一列驱动模块7021的11号引脚与单片机6的P3.1接口连接,第一列驱动模块7021的14号引脚与单片机6的P3.0接口连接,第一列驱动模块7021的9号引脚与第二列驱动模块7022的14号引脚连接,第二列驱动模块7022 9号脚悬空,第一列驱动模块7021、第二列驱动模块7022的13号引脚均接地,第一列驱动模块7021、第二列驱动模块7022的10号引脚与单片机6的P1.5接口连接。
一种基于方位识别的皮肤听声手表的方位识别方法,采用上述用于方位识别的皮肤听声手表,包括以下步骤:
步骤1、声音采集模块3采集不同方向的声音信号,声音信号以电流信号的形式经过数字过滤器4滤除高频声波,将声音信号调整到适合人体皮肤感知的频率,然后模数转换器5将电流信号转化为计算机易识别的二进制数字信号,进入单片机6中储存;同时单片机6通过快速傅里叶变换
步骤2、单片机6将信号传递至行列驱动模块7,行列驱动模块7对应驱动16行16列电流触针12,使其产生电流刺激皮肤,刺激频率为按照预先写入的算法实现每隔0.1秒产生电流,每次电流激发1s后消失,间隔0.1s后再次激发,如图8所示。
步骤3、单片机6将信号传递至陀螺仪9,陀螺仪9确定手表姿态,并根据每个方位传输的电信号的强弱不同(陀螺仪9的型号为WTGAHRS2),指向声源的初步大致方位,并将方位信号反馈至单片机6,控制对应方位的振动马达8振动。比如,陀螺仪9指向声源的方位为左前方,将该方位信号反馈至单片机6,单片机6会根据声音类别使振动马达8产生不同频率和振幅的振动,控制左方和前方的振动马达8振动,能使用者感知不同的声音。
进一步的,步骤4、单片机6根据手表姿态及声音采集模块3采集的声音信号进行主声源进行重构,获得每个方位主声源的电流斜率,通过对比左方和前方的电流斜率,然后增加电流斜率较大方位的振动马达8振动频率。
通过以上方式,本发明一种用于方位识别的皮肤听声手表,通过触针进行预先提醒,再通过马达进行方位提醒,能使患者准确接收声源方位;不会引起任何副作用,适用于聋哑人长期使用,并且体积小,方便携带;本发明一种用于方位识别的皮肤听声手表的方位识别方法,通过声音和电信号之间的转化,引起人体皮肤对于振动信号的感知,帮助听障者辨别声源产生的方位。