基于机器人的海上光伏支架腐蚀情况诊断系统及方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明属于海上光伏电站组件支架检测技术领域,具体涉及一种基于机器人的海上光伏支架腐蚀情况诊断系统及方法
背景技术
随着国家大力发展新能源发电,光伏电站的建设不断壮大,海上光伏电站作为光伏发电的典型代表,光伏组件支架作为海上光伏电站的重要组成部分,它的腐蚀情况直接关系到电站的安全运行,光伏组件支架由于长期遭受海水的侵蚀,腐蚀是不可避免的,这是导致其腐蚀的直接原因。传统的人工乘船检测耗时且效果不明显,检测人员人身的安全也得不到保障。所以目前比较迫切需要找到一种新型高效的检测方法。
机器人作为新兴的灵活的机器,尤其是对于海上光伏电站这种特殊的环境,机器人可以利用吸附技术吸附于光伏组件支架上、其微型灵活容易活动、同时利用智能化能够快速准确的对组件支架进行检测。在海上光伏电站组件支架方向利用机器人搭载智能技术来顶替传统的人工是非常必要的,以实现最终海上光伏电站组件支架检测技术领域的机械化、智能化、自动化。
发明内容
为了解决现有技术中存在的问题,本发明的目的在于提供一种基于机器人的海上光伏支架腐蚀情况诊断系统及方法,利用机器人体积小的特点可在海上光伏支架上灵活移动,结合安装在机器人上面的高清摄像头,可获得光伏组件支架的照片,利用智能处理手段将照片实时的传输到存储处理终端。
为了达到上述目的,本发明采用的技术方案是:
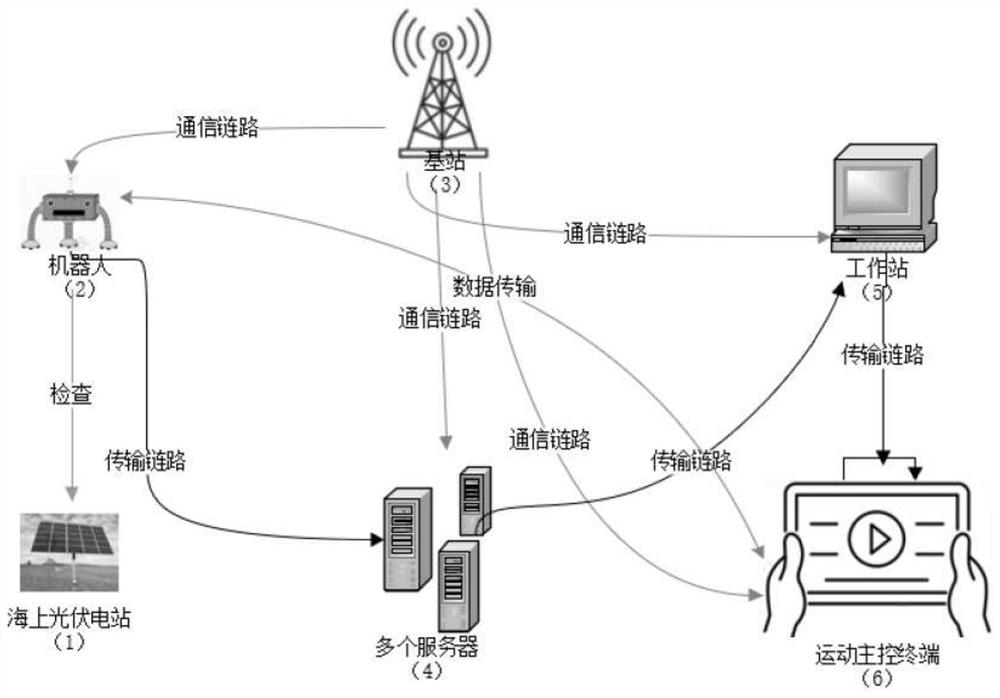
一种基于机器人的海上光伏支架腐蚀情况诊断系统,其特征在于:该系统包括海上光伏电站1、机器人2、基站3、多个服务器4、工作站5、运动主控终端6;
所述基站3通过通信链路与机器人2、多个服务器4、工作站5和运动主控终端5相连接,保障机器人2、基站3、多个服务器4、工作站5、运动主控终端5之间的数据信息传输流畅;
所述海上光伏电站1,为整个诊断系统提供光伏组件支架;
所述机器人2,吸附于光伏组件支架上,作为光伏组件支架的移动监测平台,机器人2的两侧和后面安装有摄像头,在机器人2移动过程中用于对光伏组件支架拍照,同时在机器人2的主体上还安装有超声波避障传感器,在机器人2移动过程中,感应是否存在障碍物;
所述多个服务器4,通过基站3的通信链路保证通信流畅,接收机器人2采集的光伏组件支架照片,对照片进行分割缓存判断是否存在腐蚀,对存在腐蚀的照片进行缓存压缩处理,以方便把检测到有腐蚀的数据无线传输给工作站5进行处理;
所述工作站5为计算机,接收多个服务器4传输过来的光伏组件支架腐蚀照片并对腐蚀照片进行分类存储,同时将数据传输给运动主控终端6;
所述运动主控终端6,为移动电脑平板,工作人员通过移动电脑平板上安装的应用程序,对机器人的运动进行操控,同时作为移动终端还接收工作站5传输过来的监测信息。
所述运动主控终端6,采用无线远程遥控的工作方式,通过移动手机安装相应的客户端、远程手柄以及电脑客户端进行控制,实现机器人2的360度全方位移动。
所述运动主控终端6无线遥控器下达控制命令通过无线传输模块将命令下发到运动主芯片,同时机器人2上安装的超声波避障传感器通过超声波采集设定安全距离内是否存在障碍物,超声波避障传感器会将采集到的障碍信号传送给运动主芯片,运动主芯片接收障碍信号,若接收到的信号为不存在障碍物,运动主芯片根据无线远程控制器和超声波避障传感器传输的无障碍物信号来对机器人运动模块下发运动信号,运动模块控制机器人上的微型电机和涡轮风机使其运动。
所述机器人2两侧和后面安装的摄像头安装方向是朝下的,能够保证在机器人移动的过程中摄像头始终朝下拍摄采集光伏组件支架的照片。
所述机器人2安装有锂电池用于整个机器人检测过程的供电,运动主控终端6上会实时显示机器人的电量信息,当电量低于20%时,显示电量过低,提醒工作人员进行处理。
所述的基于机器人的海上光伏支架腐蚀情况诊断系统的诊断方法,其特征在于:包括如下步骤:
步骤一:光伏组件支架作为移动检测平台,通过运动主控终端地面工作人员对机器人2进行远程运动控制,控制机器人2运动的同时机器人2本身还能够通过安装在机器人上的超声波避障传感器实现躲避障碍物。
步骤二:利用机器人的移动采集图像,当机器人在光伏组件支架上爬行时,通过安装于机器人上的摄像头对光伏组件支架表面进行连续拍照获取光伏组件支架表面照片,机器人2在获取组件支架的照片后会对照片进行无线传输,将照片传输给多个服务器4。
步骤三:多个服务器4负责分析检测拍摄的照片以确定光伏组件支架是否存在腐蚀以及腐蚀情况,并把照片分析检测的数据信息传输给地面的工作站5,工作站5对接收到的图片进行提取、连接和分类,最后存储光伏组件支架腐蚀的图像信息,以供日后对光伏组件支架腐蚀情况进行参考和分析,同时将数据传输给运动主控终端6。
与现有技术相比,本发明的有益效果是:
检测机器人用于海上光伏电站组件支架腐蚀情况检测与传统的人工检测相比具有检测效率高、灵活操作、劳动强度低、作业范围光、检测质量高的特点。用机器人代替人工,对组件支架实时采集传输图像,检测海上光伏电站组件支架腐蚀情况,提高了海上光伏电站的运行质量,为海上光伏组件支架检测领域开辟了一条全新的道路。
附图说明
图1诊断系统组成图。
图2机器人运动主控逻辑图。
图3照片采集传输逻辑图。
具体实施方式
下面结合附图和具体实施方式对本发明做进一步详细说明:
如图1-3所示,基于机器人的海上光伏支架腐蚀情况诊断系统及方法
如图1所示,为整个系统的系统结构图,包括:该系统包括海上光伏电站1、机器人2、基站3、多个服务器4、工作站5、运动主控终端6。
所述基站3通过通信链路与机器人2、多个服务器4、工作站5和运动主控终端5相连接,保障机器人2、基站3、多个服务器4、工作站5、运动主控终端5之间的数据信息传输流畅。
所述海上光伏电站1,为整个诊断系统提供光伏组件支架。
所述机器人2,通过吸附技术吸附于光伏组件支架上,作为光伏组件支架的移动监测平台,机器人2的两侧和后面安装有摄像头,在机器人2移动过程中用于对光伏组件支架拍照,同时在机器人2的主体上还安装有超声波避障传感器,在机器人2移动过程中,感应是否存在障碍物。
所述多个服务器4,通过基站3的通信链路保证通信流畅,接收机器人2采集的光伏组件支架照片,对照片进行分割缓存判断是否存在腐蚀,对存在腐蚀的照片进行缓存压缩处理,以方便把检测到有腐蚀的数据进行无线传输给工作站5进行处理。
所述工作站5为计算机,在系统里接收多个服务器4传输过来的光伏组件支架腐蚀照片并对腐蚀照片进行分类存储,同时将数据传输给运动主控终端6。
所述运动主控终端6,为移动电脑平板,工作人员可以通过移动电脑平板上安装的应用程序,对机器人的运动进行操控,同时作为移动终端还接收工作站5传输过来的监测信息。
本发明基于机器人的海上光伏支架腐蚀情况诊断系统的诊断方法,具体步骤如下:
步骤一:光伏组件支架作为移动检测平台,通过运动主控终端地面工作人员对机器人2进行远程运动控制,控制机器人2运动的同时机器人2本身还能够通过安装在机器人上的超声波避障传感器实现躲避障碍物。
步骤二:利用机器人的移动采集图像,当机器人在光伏组件支架上爬行时,通过安装于机器人上的摄像头对光伏组件支架表面进行连续拍照获取光伏组件支架表面照片,机器人2在获取组件支架的照片后会对照片进行无线传输,将照片传输给多个服务器4。
步骤三:多个服务器4负责分析检测拍摄的照片以确定光伏组件支架是否存在腐蚀以及腐蚀情况,并把照片分析检测的数据信息传输给地面的工作站5,工作站5对接收到的图片进行提取、连接和分类,最后存储光伏组件支架腐蚀的图像信息,以供日后对光伏组件支架腐蚀情况进行参考和分析,同时将数据传输给运动主控终端6。
如图2为机器人运动主控逻辑图,所述运动主控终端6,采用无线远程遥控的工作方式,可以通过移动手机安装相应的客户端、远程手柄、以及电脑客户端进行控制,实现机器人的360度全方位移动。如图2所示,运动主控终端6,无线遥控器下达控制命令通过无线传输模块将命令下发到运动主芯片,同时机器人2上安装的超声波避障传感器通过超声波采集设定安全距离内是否存在障碍物,超声波避障传感器会将采集到的障碍信号传送给运动主芯片,运动主芯片接收障碍信号,若接收到的信号为不存在障碍物,运动主芯片根据无线远程控制器和超声波避障传感器传输的无障碍物信号来对机器人运动模块下发运动信号,运动模块控制机器人上的微型电机和涡轮风机使其运动。
如图3图像采集传输逻辑图,通过在机器人2的两侧和后面安装摄像头,摄像头的安装方向是朝下的,能够保证在机器人移动的过程中摄像头始终朝下拍摄采集光伏组件支架的照片,机器人2将采集到的照片传输给多个服务器4,多个服务器4进行简单的分割缓存检测判断采集到的照片是否存在腐蚀,若不存在腐蚀,将照片进行丢弃以释放内存,若存在腐蚀,对照片信息进行缓存压缩处理,以方便把检测到有腐蚀的数据进行无线传输给工作站5的计算机进行处理。工作站的计算机提取接收到的照片信息,并将照片信息与机器人的位置进行连接,确定腐蚀光伏组件支架的位置,并对照片的所有信息进行存储,以方便日后对光伏组件支架信息进行参考分析。
运动主控终端6上安装的应用程序不但控制机器人的运动,而且对机器人的运动状态以及运动情况进行检测。人通过应用程序对运动主控终端6下发的命令执行情况进行检测判断机器人2是否正常执行所下发的命令,若正常执行运动命令,地面控制检测处理中心显示正常运行,若未正常执行运动命令,应用程序显示未正常运行,并进行报警,同时显示机器人2的位置信息,工作人员进行处理。机器人2安装有锂电池用于整个机器人检测过程的供电,应用程序会实时显示机器人的电量信息,当电量低于20%时,显示电量过低,提醒工作人员进行处理。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围。