在三维物体表面印刷功能性印刷图案的增材印刷方法、相关计算机程序和计算机可读介质
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及一种用于在三维物体表面(数字)印刷功能性印刷图案的增材印刷方法。本发明还涉及相关联的计算机程序和存储有该计算机程序的计算机可读介质。
背景技术
存在多种不同的印刷方法,尤其包括:平版印刷、柔版印刷、丝网印刷、凹版印刷和数字印刷。数字印刷,例如喷墨印刷和静电复印,将基于数字的图像直接印刷到各种类型的介质上。其他印刷方法可能适用于特定应用。
喷墨印刷方法已广泛用于在纸上印刷,因此重点关注二维表面。然而,喷墨印刷方法也可用于其他目的。例如,它们可用于在三维物体上沉积功能层或功能性印刷图案,例如在“系统级封装”(SIP)上施加导电油墨以保护其免受电磁干扰。
SIP模块在便携式电子设备的小型化中扮演着越来越重要的角色。由于SIP模块内置的高密度电气功能,电磁或电气干扰(EMI)可能会导致模块完全失效。为此,必须屏蔽SIP模块以抑制EMI辐射从SIP模块放射出和被SIP模块接收。
传统上,SIP模块使用金属外壳来屏蔽EMI。然而,金属外壳违背了小型化的目标。代替使用金属外壳,功能层可以例如通过PVD工艺来被施加。或者,例如,可以使用喷墨打印机将含银喷墨油墨沉积在SIP模块的表面上。在将喷墨油墨印刷在SIP模块的表面上之后,使用例如紫外线固化喷墨油墨,以在SIP模块的表面上形成连续的功能层。可以想到其他固化方式,例如红外线辐射或等离子体。在印刷过程之前,SIP模块的表面可能会经历预处理过程以进行清洁。同样,为此可以使用等离子体。
US 2013/0342592 A1公开了一种喷墨打印机,其用于在三维电子设备上印刷EMI屏蔽。从而将电子设备安装在可以倾斜和旋转的固定装置上,使得EMI屏蔽可以沉积在电子设备的非平行表面上。
用于在三维物体(例如电子设备)上印刷功能性印刷图案(层)的增材喷墨印刷方法与用于图形目的的喷墨印刷方法显著不同。虽然图形印刷方法中最重要的因素是沉积在特定基材(例如纸张)上的喷墨油墨的面密度(g/m
WO 2019/002153 A1公开了一种数字喷墨印刷方法,用于在三维物体的曲面上进行印刷。它使用具有被布置在印刷喷嘴平面中的多个印刷喷嘴的印刷头。印刷喷嘴平面垂直定位在曲面上方。只有那些与曲面的距离在预定范围内的印刷喷嘴才在印刷过程中被激活。
US 2012/0219699 A1公开了一种具有表面溅射装置的图形应用系统,该装置带有至少一个喷嘴,该喷嘴将溅射材料排出到目标表面上,例如金属片、汽车或飞机机身、船体等。喷嘴控制机构控制由喷嘴排出的溅射材料的量。空间参考单元用于随时确定喷嘴相对于目标表面的位置和方向。为此,立体基础上的两个2D相机被使用,并且从2D图像数据连同指定的参考点,通过数字图像处理生成3D数据。然后这些3D数据被用于自动调整喷嘴的排出特性。
US 2020/073365 A1、US 2020/108598 A1、JP 2001 010032 A、US 2019/016121A1和US 2005/195229 A1说明了仅代表技术背景的现有技术。
发明内容
本发明的一个目的是提供一种用于在三维物体的表面上印刷功能性印刷图案的增材印刷方法,该方法减轻或克服了现有技术印刷方法的缺点。特别地,本发明的一个目的是提供一种增材(数字)印刷方法,该方法以均匀且同质的厚度并且优选地高吞吐量在三维物体的表面上印刷功能性印刷图案。本发明的另一个目的是提供一种控制喷墨打印机以执行增材印刷方法的计算机程序,以及在其上存储有该计算机程序的计算机可读介质。
这些目的由独立权利要求1、17和18的主题来解决。本发明的可选和优选特征是从属权利要求2至16的主题。
本发明的第一方面涉及一种用于在三维物体的表面上印刷功能性印刷图案的增材印刷方法。根据本发明的方法包括以下步骤:(i)在平坦表面上提供三维物体;(ii)提供具有多个印刷喷嘴的印刷头,该多个印刷喷嘴限定至少一个印刷喷嘴平面,该印刷喷嘴平面与平坦表面不平行;(iii)生成在平坦表面上的物体的暴露表面的三维几何表面数据;(iv)基于三维几何表面数据,生成在平坦表面上的物体的暴露表面的二维几何表面数据;(v)确定在排出时间要从多个印刷喷嘴中的每一个排出的印刷流体量;(vi)在物体和印刷头之间产生相对移动;(vii)在相对移动期间在物体的暴露表面的至少一部分上印刷印刷图案。根据本发明,生成二维几何表面数据的步骤包括如下步骤:将二维几何表面数据投影到印刷喷嘴平面中以校正由于印刷喷嘴平面与平坦表面不平行而在二维几何表面数据中存在的失真,从而获得物体的二维印刷喷嘴平面数据。
优选地,三维几何表面数据和二维几何表面数据是相对于平坦表面生成的。
更优选地,该方法还包括确定平坦表面上的三维物体的位置数据的步骤。
优选地,如果使用光学成像或光学扫描装置确定平坦表面上的三维物体的位置数据。
更优选的是,如果将二维几何表面数据投影到印刷喷嘴平面中的步骤考虑了平面表面上的三维物体的位置数据。
根据本发明的另一个优选实施例,三维几何表面数据是使用3D-CAD数据或由成像扫描设备获得的3D数据生成的。
优选地,要从多个印刷喷嘴中的每一个排出的印刷流体量是基于以下项来确定的:(i)二维印刷喷嘴平面数据,和/或(ii)功能性印刷图案的层厚度,和/或(iii)相对移动的特性,和/或(iv)印刷流体的飞行时间,该飞行时间由印刷流体从相应的印刷喷嘴排出的时间与在物体的暴露表面上的撞击时间之间经过的时间段来定义,和/或(v)要在物体的暴露表面上印刷的印刷图案,和/或(vi)用户要求。
相对移动的特征优选地是物体与印刷头之间的相对速度。
更优选地,印刷流体的排出时间在多个印刷喷嘴之间变化。
有利的是,如果在物体与印刷头之间的相对移动期间,物体相对于印刷头移动。
根据本发明的另一优选实施例,在印刷图案已经被印刷在物体的暴露表面的至少一部分上之后,印刷头或物体绕着水平轴和/或垂直轴被移位以便在物体的暴露表面上印刷另一个印刷图案。
还优选地,如果在印刷图案已经被印刷在物体的暴露表面的至少一部分上之后,印刷图案被固化。
根据本发明的另一个优选特征,印刷喷嘴平面与平坦表面之间的角度在20°到70°之间的范围内,优选地在40°到50°之间的范围内,最优选地等于45°。
更优选地,根据本发明的方法还包括如下步骤:提供具有多个第二印刷喷嘴的第二印刷头,该多个第二印刷喷嘴限定至少一个第二印刷喷嘴平面,该第二印刷喷嘴平面与平坦表面不平行;将第二印刷头与印刷头共线布置;以及在物体与第二印刷头之间产生相对移动。
更优选地,物体与印刷头之间的相对移动以及物体与第二印刷头之间的相对移动沿着直线印刷路径产生,共线印刷头和第二印刷头被布置在该直线印刷路径上。
有利的是,如果该方法是喷墨印刷方法。
优选地,功能性印刷图案的层厚度在0.0001μm至100μm的范围内,优选地在0.001μm至50μm的范围内,更优选地在0.1μm至5μm的范围内,还更优选地在0.2μm至1μm的范围内。
本发明的第二方面涉及一种计算机程序,其包括使得喷墨打印机执行以下步骤的指令:(i)生成在平面表面上的三维物体的暴露表面的三维几何表面数据;(ii)基于三维几何表面数据,生成在平坦表面上的物体的暴露表面的二维几何表面数据;以及(iii)确定在排出时间要从具有多个印刷喷嘴的印刷头排出的印刷流体量,该多个印刷喷嘴限定至少一个印刷喷嘴平面,该印刷喷嘴平面与平坦表面不平行。根据本发明,生成二维几何表面数据的步骤包括如下步骤:将二维几何表面数据投影到印刷喷嘴平面中以校正由于印刷喷嘴平面与平坦表面不平行而在二维几何表面数据中存在的失真,从而获得物体的二维印刷喷嘴平面数据。
本发明的第三方面涉及一种在其上存储有前述计算机程序的计算机可读介质。
附图说明
现在将使用附图通过示例的方式来描述本发明。附图用于说明目的并且仅用于提供本发明的示例性实施例。附图并不限制本发明,而是仅代表其优选实施例。
图1示出了属于根据本发明优选实施例的方法的第一步骤序列;
图2示出了属于根据本发明优选实施例的方法的第二步骤序列;
图3示出了适合于执行根据本发明优选实施例的印刷方法的打印机的简化设置;以及
图4示出了适合于执行根据本发明的优选实施例的印刷方法的打印机的简化替代设置。
具体实施方式
本发明通常适用于在三维物体(设备),例如电子设备上大批量印刷功能性印刷图案。特别适合在所谓的“系统级封装”(SIP)上沉积功能层。功能层可以是在施加时实现特定功能的任何种类的层。该功能优选地是电和/或电子功能。然而,它也可以是保护和/或绝缘功能。
该功能可以是电子设备屏蔽由电磁感应引起的电磁干扰(EMI)或外部源发出的电磁辐射。功能层可以由导电油墨构成,导电油墨是当被印刷并优选固化时产生导电特性的一种油墨。这种类型的油墨的示例是银油墨或含银油墨。导电油墨也可以是包括导电颗粒(例如银颗粒)的类型。
为了使导电油墨起到EMI屏蔽的作用,印刷必须被执行以使得导电油墨在电子设备的暴露表面上形成连续的层,其中,没有间隙大于将要被阻挡的外部电磁辐射频率的四分之一波长。功能层也可以是非导电层,例如保护层,其保护保护层下方的导电层免受损坏和/或其他不利的环境影响,例如过热和腐蚀诱发物质,例如氧气。
使用本发明的方法,功能层可以仅沉积在三维物体(设备)的某些部分或整个暴露表面上,并且可以选择性地操纵层厚度,以使得其在整个三维物体的暴露表面的印刷部分上变化或者是高度均匀且同质的。最终的层厚度(当然取决于绝对厚度值)可在一个或几个后续印刷步骤中实现。因此,可以实现具有可特别适应用户需要和要求的特性的高效功能层。
功能性印刷图案的层厚度优选在0.0001μm至100μm的范围内,优选在0.001μm至50μm的范围内,更优选在0.1μm至5μm的范围内,还更优选在0.2μm至1μm的范围内。
在本发明的方法中使用的三维物体可以优选地是电子设备,其可以具有任何三维几何形状,其表面在不同方向上延伸。本发明原则上可用于任何数字印刷工艺,优选数字喷墨印刷工艺,通过该工艺可以沉积具有选择性可调厚度、高结构均匀性和同质性以及高吞吐量的导电和非导电涂层(层、印刷图案)。
喷墨打印机是众所周知的,并且可以具有专门适应用户需求的不同设置。本发明的方法优选使用具有一个或多个印刷头的喷墨打印机进行。每个印刷头具有布置在印刷喷嘴平面20(图3)中的多个印刷喷嘴。本发明方法中使用的印刷头的印刷宽度可根据三维物体的尺寸来选择,例如30.5厘米(12英寸)和更大。印刷头可优选地包括多个印刷头单元,例如6个,每个印刷头单元具有例如5.1cm(2英寸)的宽度。印刷速度可以高达2.000毫米/秒,而印刷头频率,即印刷头喷射墨滴的频率,可以高达150kHz。
图1示出了在根据本发明优选实施例的方法中采用的第一步骤序列。三维物体,例如电子设备,例如SIP,由附图标记100表示。在步骤S1A中,提供三维物体100。事实上,多个三维物体100可被布置在平坦表面10上,为简单起见,平坦表面10在x和y方向上延伸。平坦表面10可以是喷墨打印机的基板支架的表面,或者可以是适合于在其上定位在喷墨打印机内部进行印刷过程的一个或多个三维物体100的任何其他表面。在多个三维物体100的情况下,它们优选地以类似网格的方式布置并且更优选地彼此等距地布置在平坦表面10上。
在步骤S1A中提供三维物体100优选地包括定义物体100的三维几何形状的步骤。为此,定义或确定几何表面数据。它们可由外部源,例如外部数据库(客户),优选以3D CAD数据的形式提供,或者它们可以通过使用现场激光扫描设备(未显示)获得,该设备激光扫描平坦表面10上的三维物体100的暴露表面(以下称为暴露表面)的形貌。这些几何表面数据可优选地被转换成三维矢量图形数据(多边形数据),其形成数字三维物体文件的基础。
在图1所示的步骤S1B中,优选地使用光学成像系统(例如相机30),或光学扫描装置(例如激光线扫描仪),确定平坦表面10上的多个三维物体100中的每一个的准确位置,从而获得平坦表面10上的一个或多个三维物体100的位置数据。优选地选择相机30的取向和位置以使得相机30的视野以预定角度检测放置在平坦表面10上的所有三维物体100。预定角度是线32与平坦表面10之间的角度。线32优选地垂直于相机30的主光轴。
或者,在第一步中,相机30仅拍摄三维物体100的一部分的图像,并且在第二步或进一步的步骤中,以预定角度检测平坦表面10上的三维物体100的其余部分。将如此获得的初步图像放在一起以获得所有三维物体100的完整图像。鉴于与如果相机30要对所有三维物体100一次成像而获得的图像相比,该完整图像的分辨率更高,这是特别有利的。当使用光学扫描设备代替相机30时,可以获得相同的优点,并与更高的精度相关联。
相机30或光学扫描设备可以不以相对于平坦表面10的角度被设置。而是可以垂直地布置在平坦表面10上方。在这种情况下,三维物体100可以被一次成像或扫描,或按时间顺序仅对其中的部分进行成像或扫描,然后对各个图像进行构图以获得所有三维物体100的完整图像。优选地,在相机30,或者光学扫描设备保持静止的时候,移动三维物体100。
在步骤S1C中,当确定平坦表面10上的每个物体100的位置数据时,可以检测并考虑平坦表面10上的三维物体100可能的错位(取向错误)。错位将优选地以xy平面中的角度α来表示。对于显示没有错位的所有物体100,角度α优选地为零。角度α是在xy平面中相对于位于三维物体100上的特定参考点(例如其重心)测量的。替代地,所有正确取向的物体100的朝向可以由角度α
在步骤S1C的修改中,z方向上的错位,即垂直于平坦表面10(xy平面)的方向上的错位,可被另外考虑并且可用角度β来表示。
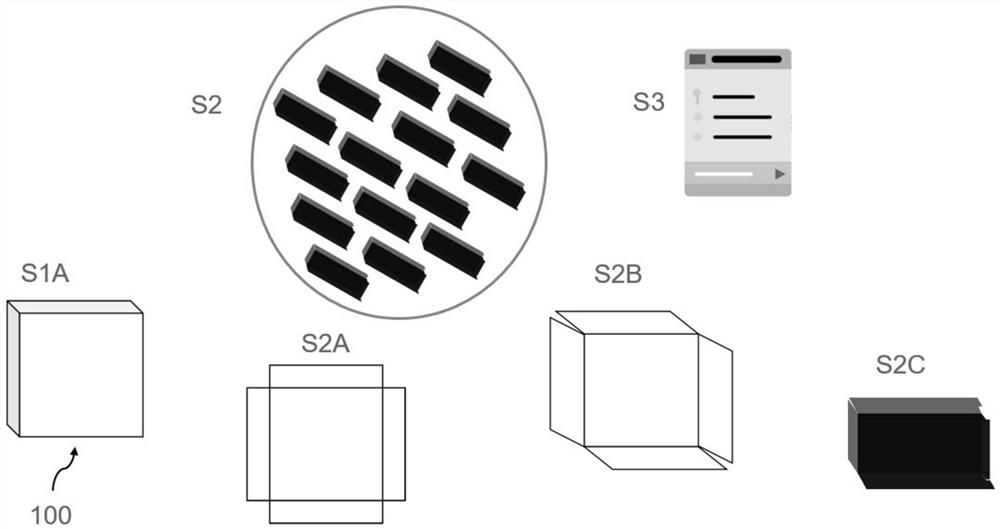
在包括参考图2解释的第二步骤序列的步骤S2中,创建数字印刷文件,包括对在步骤S1A中获得的几何表面数据、优选地在步骤S1B中获得的位置数据和在步骤S1C中获得的平坦表面10上的所有物体100的错位数据的修改。现在将参考图2解释如何修改这些数据。
从步骤S1A中的三维物体100的暴露表面的三维几何表面数据开始,这些三维几何表面数据优选地通过展开(打开)被转换为二维几何表面数据。各种软件工具可用于通过展开来进行3D到2D的转换,例如
假设三维物体100为长方体形状,如图2所示,并且用S1A表示,长方体的底部矩形位于平坦表面上,然后沿某些边缘切开长方体以展开3D长方体并将展开的长方体放置在平坦表面上。2D展开的长方体然后将具有用五个矩形对称交叉的形状,其中,一个中心矩形代表3D长方体的顶部矩形,四个矩形与中心矩形的四个边相邻。请注意,因为展开过程的性质以及由于其上没有印刷功能性印刷图案的事实,3D长方体的底部矩形未在图2中的S2A中示出。
为了在平坦表面10上生成三维物体的暴露表面的二维几何表面数据,可以通过表面网格来定义三维物体的暴露表面。表面网格被放置成使得其延伸通过三维物体表面上的某些点。这些点优选地在一定程度上定义了物体的3D形状。在上面提到的长方体的情况下,那些形状给赋(shape-giving)点将是,例如,长方体的边缘或长方体的八个角点。
如稍后将参考图3和图4解释的,优选用于执行本发明的方法的喷墨打印机的印刷头200A(和200B),具体地印刷喷嘴200A1-200An,相对于平坦表面10以预定角度来取向。该预定角度优选地在20°到70°之间的范围内,优选地在40°到50°之间的范围内,并且最优选地相对于平坦表面10为45°。
由于印刷喷嘴平面20与平坦表面10不平行,在步骤S2A中获得的展开的二维几何表面数据固有地包括由于平坦表面10与印刷喷嘴平面20不平行的事实而导致的失真。由于在二维平面上的透视图中显示的3D长方体的距离越短,它们在现实世界中越远,(展开的)二维几何表面数据不一定反映现实世界的距离。通过将在步骤S2A中获得的二维几何表面数据投影到印刷喷嘴平面20中(平面投影),在步骤S2B中校正这种失真,从而获得物体的二维印刷喷嘴平面数据。为此目的,印刷喷嘴平面20可以例如使用软件虚拟地生成。校正是使用矩阵代数进行的,包括通过压缩进行重新缩放(校正因子约为0.6)和二维几何表面数据的后续剪切。对平面投影有用的矩阵代数是众所周知的,因此这里不再详述。
如上所述,如果相机30或光学扫描装置被垂直设置在平坦表面10上方,则在步骤S1B中获得的平坦表面10上的一个或多个三维物体100的位置数据,以及在步骤S1C中获得的任何错位数据可被处理或转换以考虑平面32不对应于印刷喷嘴平面20的事实。
在物体100相对于印刷头200A移动期间,以特定时间间隔先验地确定物体100的二维印刷喷嘴平面数据,从而以各种时间间隔获得二维印刷喷嘴平面数据集。这是由于在印刷过程中物体100朝向印刷头200A移动的期间变形的量和可能的类型改变的事实。
此外,在步骤S2B中的物体的二维印刷喷嘴平面数据集中可以额外地考虑物体100由在步骤S1C中确定的并且在图1中示出的角度α表示的可能存在的错位。
优选地,三维几何表面数据和二维几何表面数据相对于平坦表面10生成。然而,也可以使用任何其他平面。
在图2中的步骤S2C中,考虑用户/客户规范。此类用户规范可能涉及功能性印刷图案所需的层厚度、功能性印刷图案的类型(导电、不导电)、功能性印刷图案的材料、待印刷物体的暴露表面面积等。
针对位于平坦表面10上的每个三维物体100执行步骤S1A至S2C。这样,在步骤S2中获得印刷文件,该印刷文件用于控制喷墨打印机的一个或多个印刷头200A和200B。
图3显示了用于实施本发明方法的打印机的简化设置。该设置优选地包括两个印刷头200A、200B。每个印刷头200A、200B具有位于印刷喷嘴平面20、22中的多个印刷喷嘴200A1-200An、200B1-200Bn。印刷喷嘴平面20、22与平坦表面10不平行,三维物体100位于该平坦表面10上。
假设三维物体100是长方体,物体100相对于印刷头200A移动,其垂直边缘中的一个在前面。因此,使用印刷头200A印刷立方体的顶表面和两个侧表面,并且当物体100反向运动时,使用印刷头200B印刷另外两个侧表面和顶表面。物体100优选沿着笔直的印刷路径共线地移动,其中,两个印刷头200A、200B优选共线地布置。然而,物体100也可在两个印刷头200A、200B之间往复运动。
数字1、2和3表示物体100沿印刷路径的不同纵向位置的时间顺序。不言而喻,为了在物体100的暴露表面上实现均匀的层厚度,必须考虑印刷喷嘴200A1-200An之间的任何高度差Δh,因此必须考虑油墨的飞行时间差Δt。飞行时间被定义为从印刷喷嘴200A1-200An喷出油墨开始到油墨撞击物体100的暴露表面时结束的时间段。此外,由于物体100的运动朝向印刷头200A,例如,从印刷喷嘴200A1-200An中最低的一个排出的油墨将沉积在物体100的区域上,该区域在时间段Δt之后将再次被从不同喷嘴200A1-200An排出的墨印刷。图3中的Δt表示从不同印刷喷嘴200A1-200An排出的油墨在物体100的顶表面上的撞击时间的差异。
图4示出了用于实施本发明方法的打印机的简化替代设置。在图4中,仅提供了一个印刷头200A。图4中的Δt表示从不同印刷喷嘴200A1-200An喷出的油墨在物体100的垂直侧表面上的撞击时间的差异。
在图4的替代设置中,印刷头200A可围绕水平轴和/或垂直轴移位,以便在使物体反向运动时在物体100的暴露表面上印刷另一个印刷图案。
在另一种替代设置中,印刷头200A可以是静止的,反而是物体100被移位或旋转优选180°,以便在物体100的其余暴露表面上印刷印刷图案。
为了确定将要从每个印刷喷嘴200A1-200An排出的油墨量,考虑了油墨的飞行时间。此外,需要考虑从不同印刷喷嘴200A1-200An排出的油墨的飞行时间Δt的任何差异。此外,考虑了层厚度和可能的其他用户要求。此外,每个印刷喷嘴200A1-200An可被单独控制,因为从每个印刷喷嘴200A1-200An排出的油墨量可变化。此外,油墨的排放时间可以从一个印刷喷嘴200A1-200An到另一个印刷喷嘴200A1-200An不同,并且需要考虑物体100相对于一个或多个印刷头200A、200B的速度。所有这些参数也可被包括在步骤S2中获得的印刷文件中。
作为印刷方法的简化示例,为了使用包括两个共线布置的印刷头200A、200B的喷墨打印机在长方体物体100的表面上获得均匀且同质的层厚度,沉积在立方体顶表面上的油墨量在立方体朝向印刷头200A移动期间必须是沉积在立方体侧表面上的油墨量的一半。原因是顶表面被印刷两次,即在立方体朝向印刷头200A移动期间和在朝向印刷头200B移动期间,而侧表面仅被印刷一次,因为一对侧表面是在一个印刷头200A或200B的印刷阴影中。
在每个或预定数量的印刷步骤之后,可以固化功能性印刷图案。如果使用需要交联的油墨,则被交联的油墨可进一步经历化学还原步骤,结果纳米颗粒形式的金属将沉淀。任何溶剂都会蒸发,印刷的油墨会被烧结。固化步骤被理解为包括在特定类型的油墨中发生的所有这些化学过程。
参考图2,在步骤S3中,被包括在印刷文件中的数据被发送到喷墨打印机的控制器。然后控制器控制整个印刷过程,直到满足所有印刷规范。