一种实验小鼠连续变化称重装置及其使用方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及动物实验用具技术领域,特别是涉及一种实验小鼠连续变化称重装置。
背景技术
实验小鼠在饲养过程中需要对其进食量进行控制评估,以满足均衡的营养摄入需求;目前,小鼠的进食量测量均是通过测量食物投喂量和剩余量的差值对小鼠进食量进行计算,但此方法无法计算群体进食时单只小鼠的进食量情况,同时进食过程中饲料抛洒等因素也难以控制,从而对计算精确度造成影响;
同时,现有对单只小鼠进食前后的体重变化进行称重并计算出重量差,虽然可以有效避免其他外界因素的影响,但是,由于小鼠在称重过程中处于活动状态,导致获得的体重值的精度较低,造成小鼠进食量的精度也低。
发明内容
本发明的目的在于克服以上所述的缺点,提供一种实验小鼠连续变化称重装置。
为实现上述目的,本发明的具体方案如下:
一种实验小鼠连续变化称重装置,包括称重支架,两端具有开口结构的离心滚筒,两个离心力检测机构,两个推板,两个推杆结构,旋转动力组件,以及两个初步称重单元;
所述称重支架呈U形设置,所述称重支架两端的底部均开设有通道;所述离心滚筒转动连接在称重支架内;所述两个离心力检测机构对称设于称重支架两端的外侧且均与离心滚筒同轴设置,并用于检测离心滚筒在上下左右方向上对离心力检测机构的压力大小以及检测是否有小鼠进入离心滚筒内;所述两个推板对称设于离心滚筒内并与离心滚筒同轴设置,且两个推板均不跟随离心滚筒转动,所述两个推板的边缘位置均设有用于与通道连通的缺口;所述两个推杆结构分别对应用于使推板在离心滚筒内同步做轴向移动和旋转运动;所述旋转动力组件用于驱动离心滚筒转动;所述两个初步称重单元对称设于称重支架两端的外侧并对应通道的位置设置。
本发明进一步地,所述离心滚筒内壁敷设有用于缓冲减震的海绵层。
本发明进一步地,所述离心力检测机构包括检测座体,所述检测座体固定在称重支架上,所述检测座体的两侧均滑动连接有滑块,两个所述滑块之间的滑动方向相互垂直,所述检测座体具有一安装孔,所述安装孔内在上下左右四个方向分别安装有压电传感器,其中两个相对的压电传感器与其中一个滑块的两端对应,另外两个相对的压电传感器与另外一个滑块的两端对应,所述安装孔内设有一轴套,所述轴套穿设于两个滑块上,所述离心滚筒的轴颈活动贯穿于轴套。
本发明进一步地,所述推板具有一导向轴,所述导向轴沿离心滚筒的轴线向外伸出,并通过一导向架与称重支架连接,所述导向架具有一中心孔,该中心孔内设有卡销,所述导向轴上设有螺旋槽,所述导向轴贯穿于中心孔,所述卡销嵌设于螺旋槽内,所述导向轴的自由端通过一连接臂与推杆结构的输出端连接。
本发明进一步地,所述旋转动力组件包括电机、小圆柱齿轮和大圆柱齿轮,所述电机固定在称重支架上,所述小圆柱齿轮连接在电机输出端上,所述大圆柱齿轮固定套接在离心滚筒一端的轴颈上,并与小圆柱齿轮啮合。
本发明进一步地,所述两个初步称重单元远离称重支架的一端均设有便于小鼠进入初步称重单元上的导向斜槽。
本发明的有益效果为:本发明通过使小鼠进食前后均在离心作用下保持相对静止状态,并通过离心力计算得到小鼠的体重值,进而获得小鼠的进食量,计算精度更高。
附图说明
图1是本发明的立体图;
图2是本发明另一视角的立体图;
图3是本发明的剖面示意图;
图4是图3中I处的局部放大示意图;
图5是图3中II处的局部放大示意图;
图6是本发明的离心力检测机构的分解示意图;
附图标记说明:1、称重支架;2、离心滚筒;3、离心力检测机构;31、检测座体;32、滑块;33、压电传感器;34、轴套;4、推板;41、导向轴;5、推杆结构;6、旋转动力组件;61、电机;62、小圆柱齿轮;63、大圆柱齿轮;7、初步称重单元;8、海绵层;9、导向架;10、连接臂;20、导向斜槽;30、控制单元。
具体实施方式
下面结合附图和具体实施例对本发明作进一步详细的说明,并不是把本发明的实施范围局限于此。
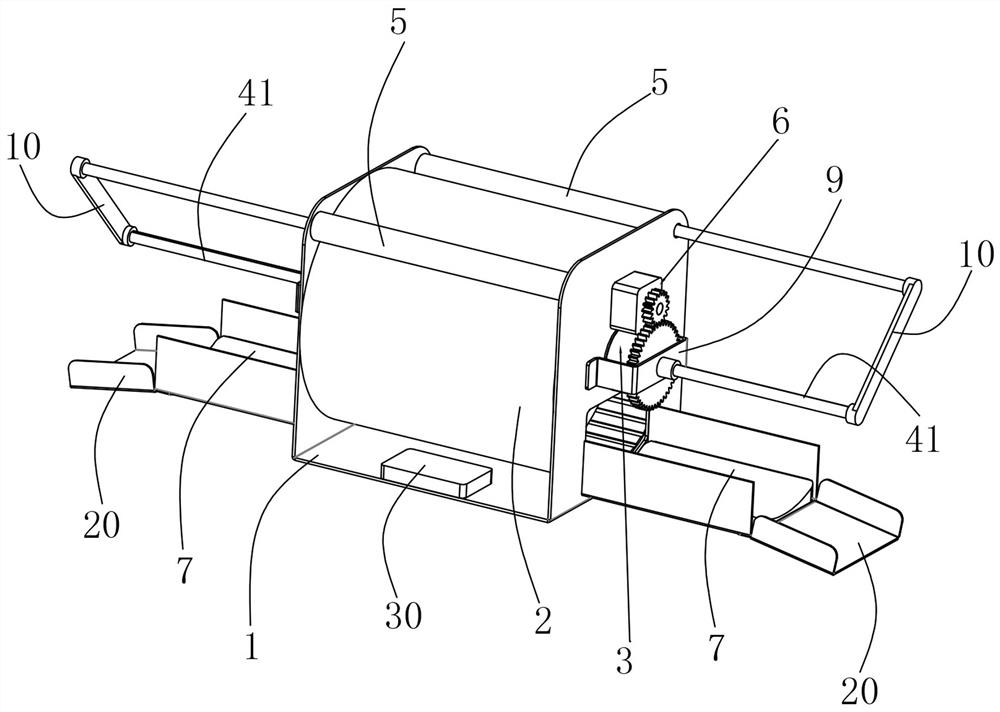
如图1至图6所示,本实施例所述的一种实验小鼠连续变化称重装置,包括称重支架1,两端具有开口结构的离心滚筒2,两个离心力检测机构3,两个推板4,两个推杆结构5,旋转动力组件6,以及两个初步称重单元7;
所述称重支架1呈U形设置,所述称重支架1两端的底部均开设有通道;所述离心滚筒2转动连接在称重支架1内;所述两个离心力检测机构3对称设于称重支架1两端的外侧且均与离心滚筒2同轴设置,并用于检测离心滚筒2在上下左右方向上对离心力检测机构3的压力大小以及检测是否有小鼠进入离心滚筒2内;所述两个推板4对称设于离心滚筒2内并与离心滚筒2同轴设置,且两个推板4均不跟随离心滚筒2转动,所述两个推板4的边缘位置均设有用于与通道连通的缺口;所述两个推杆结构5分别对应用于使推板4在离心滚筒2内同步做轴向移动和旋转运动;所述旋转动力组件6用于驱动离心滚筒2转动;所述两个初步称重单元7对称设于称重支架1两端的外侧并对应通道的位置设置。
本实施例的工作方式是:工作时,将整个称重装置置于鼠笼和小鼠投食点之间,两个推杆结构5分别对应带动两个推板4相互轴向移动,直至推板4与离心滚筒2的端部位置对应,同时两个推板4做旋转运动,使得缺口与称重支架1上的通道对应连通,实验小鼠在投食点位置的食物吸引下从鼠笼进入位于鼠笼测的初步称重单元7上,此时位于鼠笼测的初步称重单元7对小鼠的体重进行初步测量,得到测量值M,根据测量值M,利用公式:
在小鼠进食后,小鼠沿着反方向进入投食测的初步称重单元7上,然后重复上述称重过程,得到小鼠进食后的精确体重值M
本实施例通过使小鼠进食前后均在离心作用下保持相对静止状态,并通过离心力计算得到小鼠的体重值,进而获得小鼠的进食量,计算精度更高。
基于上述实施例的基础上,进一步地,所述离心滚筒2内壁敷设有用于缓冲减震的海绵层8;如此设置,利用海绵层8为小鼠在转动过程中提供缓冲减震作用,同时也更利于保证在转动过程中小鼠与离心滚筒2保持相对静止状态。
基于上述实施例的基础上,进一步地,所述离心力检测机构3包括检测座体31,所述检测座体31固定在称重支架1上,所述检测座体31的两侧均滑动连接有滑块32,两个所述滑块32之间的滑动方向相互垂直,所述检测座体31具有一安装孔,所述安装孔内在上下左右四个方向分别安装有压电传感器33,其中两个相对的压电传感器33与其中一个滑块32的两端对应,另外两个相对的压电传感器33与另外一个滑块32的两端对应,所述安装孔内设有一轴套34,所述轴套34穿设于两个滑块32上,所述离心滚筒2的轴颈活动贯穿于轴套34。
实际使用时,在小鼠进入离心滚筒2内时,使得离心滚筒2通过轴套34带动滑块32产生在上下方向的滑动趋势,从而对位于上下方向的压电传感器33产生压力,压电传感器33感应信号,从而实现检测是否有小鼠进入离心滚筒2内的目的,以触发推杆结构5带动推板4运动以及旋转动力组件6带动离心滚筒2转动,而在离心滚筒2转动时,离心滚筒2通过轴套34带动滑块32产生在左右方向的滑动趋势,对位于左右方向的压电传感器33产生压力,压电传感器33感应信号,并测的离心滚筒2在左右方向上对压电传感器33的压力大小,进而利用上述公式计算得到小鼠处于相对静止状态下的体重值M
基于上述实施例的基础上,进一步地,所述推板4具有一导向轴41,所述导向轴41沿离心滚筒2的轴线向外伸出,并通过一导向架9与称重支架1连接,所述导向架9具有一中心孔,该中心孔内设有卡销,所述导向轴41上设有螺旋槽,所述导向轴41贯穿于中心孔,所述卡销嵌设于螺旋槽内,所述导向轴41的自由端通过一连接臂10与推杆结构5的输出端连接。本实施例中,推杆结构5为电动推杆。
实际使用时,利用导向架9为推板4提供支撑,避免导向轴41施加压力作用在离心滚筒2上而影响压力传感器的测量精度,同时通过卡销和螺旋槽配合,使得推板4在轴向移动的过程中,同步进行旋转运动,从而实现推板4上的缺口的位置调整。
基于上述实施例的基础上,进一步地,所述旋转动力组件6包括电机61、小圆柱齿轮62和大圆柱齿轮63,所述电机61固定在称重支架1上,所述小圆柱齿轮62连接在电机61输出端上,所述大圆柱齿轮63固定套接在离心滚筒2一端的轴颈上,并与小圆柱齿轮62啮合。
实际使用时,小圆柱齿轮62和大圆柱齿轮63形成减速结构,并将电机61的旋转动力传递至离心滚筒2上,从而驱动离心滚筒2转动。
基于上述实施例的基础上,进一步地,所述两个初步称重单元7远离称重支架1的一端均设有便于小鼠进入初步称重单元7上的导向斜槽20;如此设置,便于引导小鼠进入初步称重单元7上。
本实施例中,还包括一控制单元30,该控制单元30设置在称重支架1的底端,以接收压电传感器33的信号,从而控制推杆结构5、电机61的动作,计算小鼠的体重值和进食量,如此更适应于动物实验环境下使用,保证小鼠不会被外界污染。
以上所述仅是本发明的一个较佳实施例,故凡依本发明专利申请范围所述的构造、特征及原理所做的等效变化或修饰,包含在本发明专利申请的保护范围内。