具有柔性导向件的钟表铰接机构
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及一种用于钟表机构的铰接机构/连杆机构,其布置成用于在致动器与接收器之间进行运动传递。
本发明还涉及一种钟表机构,其包括致动器和接收器,以及至少一个这样的铰接机构,其布置成用于在致动器与接收器之间进行运动传递。
本发明还涉及一种钟表机芯,其包括至少一个这样的钟表机构,和/或至少一个这样的铰接机构。
本发明还涉及一种手表,其包括至少一个这样的钟表机芯,和/或至少一个这样的钟表机构,和/或至少一个这样的铰接机构。
本发明涉及钟表机构领域,特别是显示机构和复杂功能机构领域。
背景技术
钟表机构内部的运动转换需要很大的容积,这无法分配给复杂机构的壳腔,并导致能量效率的损失,从而影响钟表、特别是手表的动力储备。
发明内容
本发明提出使运动转换机构尽可能扁平,即使它们在某些情况下不得不包括两个或三个平行的层级,并找到通过以下方式来减少摩擦的解决方案:将驱动接触限制在严格必要的范围内,同时包括最少的总是对整体效率有害的摩擦部件。
为此,本发明将重型机械或一般机械中公知的铰接机构的一些原理应用于钟表机构。无论如何,其目的都是不在枢轴、铰接部、导向件和其它滑动件上产生比经抑制的摩擦更多的摩擦。
因此,本发明将柔性导向件引入控制机构例如显示或上条控制装置中,所述柔性导向件的钟表学应用迄今主要涉及振荡器。
因此,本发明旨在使用能够根据将在下文中阐述的Hoeckens、Chebyshev、Roberts、Klann铰接机构或类似机构的原理进行运动变换的柔性导向件。
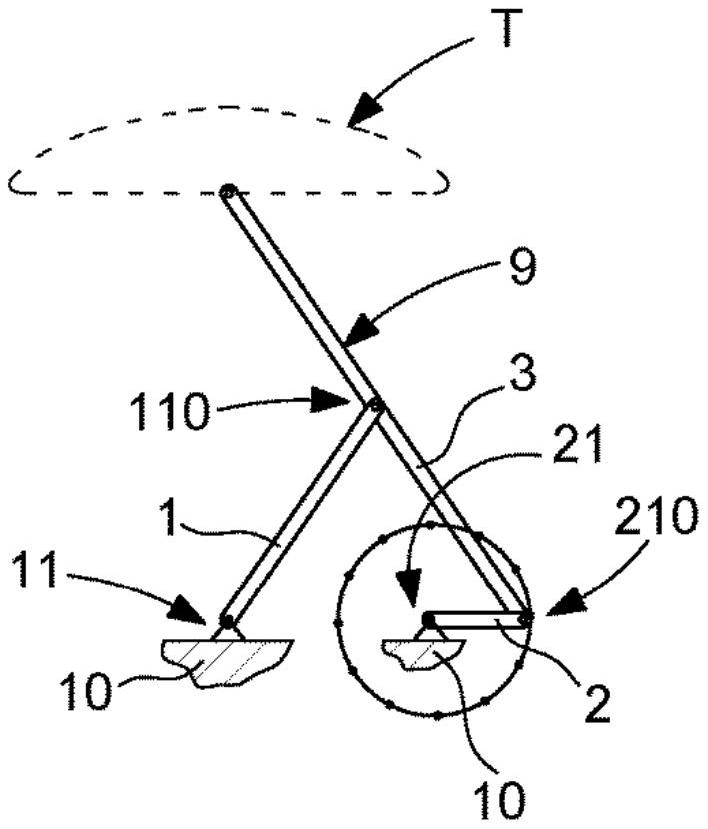
重要的是应理解,尽管这些机构的运动通常在平面中进行,但在两个方向(x和y)上,这些铰接部只有一个自由度。该机构的一个特定点,比如图9中的点M,必然会执行所绘制的路径:它的路径是受限的,并且所述点沿着该路径只有一个真实自由度。类似地,图12中的点P遵循一条线性路径。
铰接杆形式的已知机构的转换可以利用柔性导向件形式的导向件和铰接部来实现,这消除了损失。
因此,本发明涉及根据权利要求1所述的用于钟表机构的铰接机构,其布置成用于在致动器与接收器之间进行运动传递。
本发明还涉及一种钟表机构,其包括致动器和接收器以及至少一个这样的铰接机构,该铰接机构布置成用于在致动器与接收器之间进行运动传递。
本发明还涉及一种钟表机芯,其包括至少一个这样的钟表机构,和/或至少一个这样的铰接机构。
本发明还涉及一种手表,其包括至少一个这样的钟表机芯,和/或至少一个这样的钟表机构,和/或至少一个这样的铰接机构。
附图说明
本发明的其它特征和优点将在参考附图阅读以下详细描述时显现,在附图中:
-图1以平面图示意性示出了形式为基本上平面的铰接四边形的控制机构,其中四边形的一条边是固定结构;在铰接至该固定结构的两个臂具有相同长度的特定情况下,铰接至这两个臂的第四条边的中点遵循大致8字形的路径;
-图2以类似于图1的方式示出了一个变型,其中各个臂与固定结构的铰接点位于第四条边的行进区域的两侧,该第四条边始终遵循大致8字形的路径;
-图3以类似于图1的方式示出了称为Watt平行四边形的另一种铰接机构,其布置成将旋转运动转换成基本直线运动;
-图4以类似于图3的方式示出了类似的机构,其中第四条边的中点的路径在其一部分行程上大致是线性的;
-图5以类似于图1的方式示出了称为Chebyshev铰接机构的另一种铰接机构,该铰接机构仅包括三个杆(包括固定结构),其两个臂铰接至固定结构,通过滑动连接部彼此协作,使得承载滑动件的臂的一个特定点在其一部分行程上遵循大致线性路径,并且在返回其线性路径的起点时在其剩余行程上遵循畅通的弯曲路径;
-图6是这种Chebyshev铰接机构的滑道-滑动件连接部的细节;
-图7示出了这种Chebyshev铰接机构的两个极限位置;
-图8以类似于图5的方式示出了另一种铰接机构,该铰接机构是Chebyshev铰接机构的发展,称为Chebyshevλ机构,其包括四个铰接杆,一个杆铰接至固定结构并铰接在承载滑动件的臂的一端,所述杆用作曲柄,承载滑动件的所述臂的另一端限定了具有大致线性部分的类似路径;
-图9示出了处于另一位置的图8的机构;
-图10以类似于图1的方式示出了另一种三杆铰接机构(包括固定结构),即所谓的Hoeckens机构,其中,铰接至固定结构的第一铰接部承载连接杆,该连接杆被驱动进行圆周运动,并且与长杆铰接,该长杆在滑动件中滑动,该滑动件本身铰接在固定结构的第二点处;
-图11以类似于图1的方式示出了另一种铰接机构,称为Roberts机构,其具有五个杆,其中三个杆形成不可变形的等腰三角形;三级杆是该等腰三角形的底边,该等腰三角形的两个侧边的长度与铰接至固定结构的臂的长度相同,当其中一个二级臂或底边由于交替的旋转运动被动画化时,该等腰三角形的与底边相对的顶点遵循在主铰接部的线上的直线运动;
-图12以类似于图11的方式示出了处于两个不同位置的这种Roberts机构;
-图13以类似于图1的方式示出了另一种铰接机构,称为Peaucellier-Lipkin机构,其以实现非常接近直线的路径而知名,包括八个杆:固定结构在第一多重铰接部处承载两个长度相同的第一臂,这些第一臂的相对端铰接至规则的可变形菱形的两个相对顶点,该菱形的另一顶点铰接至第二臂,该第二臂在第二铰接部处铰接至固定结构;
-图14和图15部分地图示了处于特定位置的图13的机构;
-图16以透视图示意性示出了另一种铰接机构,称为Klann机构,其优点是能够复制复杂的路径,例如人类的步行运动;这里该机构包括六个杆,它们在三个平行的层级上延伸,并通过七个铰接部相互铰接;这种机构因而可以避免路径上的障碍物;
-图17和图18以平面图部分地图示了处于特定位置的图16的机构;
-图19以类似于图1的方式示出了具有柔性轴颈连接装置的用于平移引导的机构,两个臂中的每一个都通过颈部一方面连接到固定结构,另一方面连接到L形的三级杆;
-图20以类似于图1的方式示出了用于平移引导的机构,该机构具有通过柔性条带实现的柔性连接装置,其中U形固定结构借助于四个柔性条带承载质量块,这里所述四个柔性条带是直的且彼此平行的;
-图21以类似于图1的方式示出了具有两个柔性条带的所谓RCC(代表远程中心顺应性)导向机构,其中两个条带的方向交点限定了L形质量块的虚拟枢转轴线,也称为偏移轴线,该L形质量块由这两个条带悬挂在此处也呈L形的固定结构上;
-图22以类似于图11的方式示出了具有四个颈部的所谓RCC导向机构,其包括此处呈L形的固定结构,该固定结构根据两个相交方向经由颈部承载各个臂,这些臂通过其它颈部连接到此处也呈L形的悬挂质量块,并且其中,成对对齐的两组颈部的方向交点限定了悬挂质量块的虚拟枢转轴线,也称为偏移轴线;
-图23至28以示意性的局部平面图示出了Chebyshevλ机构——其原理在图8和9中示出——应用于月相的逆行显示,第三臂是传动件,该传动件在其远端处承载暗色圆盘,在此处位于手表十点位置处的旋转控制件的作用下,该圆盘能够以渐进和线性的方式隐藏月球的清晰图示;该传动件通过第一旋转臂上的第一柔性条带和第二臂上的第二柔性条带悬挂到手表的结构上,第二臂本身由与第二柔性条带大致对齐的第三柔性条带悬挂;
-图29至41以类似于图23至28的方式示出了Roberts机构的另一种应用,即用于北半球的另一种类似的逆行月相显示机构,其中传动件此次被悬挂在与两个臂大致对齐的两个柔性条带之间;图29是带有该机构的手表的平面图;图30和31图示了在休止位置的满月显示,图32和33显示了下弦月,图34和35显示了新月,图36和37显示了上弦月,图38和图39显示了满月,图40和图41显示了所有先前图示位置的叠加;
-图43至54以示意性的局部平面图示出了Chebyshevλ机构在日期显示中的另一种应用,传动件在其远端包括指状部,该指状部布置成用于驱动具有常规内齿圈的日期环,该日期环由未图示的运动链保持在适当位置;图42图示了允许获得直路径T1的比例:固定结构的两个铰接部之间的距离是曲柄在其铰接部之间的长度的两倍,并且传动件的中间铰接部距其与曲柄的铰接部的距离是曲柄在其铰接部之间的长度的2.5倍,并且传动件的限定该线性路径的远端距传动件的中间铰接部的距离是曲柄在其铰接部之间的长度的2.5倍,该远端与传动件的两个铰接部对齐;
-图43和44部分地图示了该机构,曲柄未显示,虚线圆圈图示了曲柄与传动件的铰接部的路径;将传动件的中间部分连接到手表的固定结构的铰接臂在这里包括中间质量块,该中间质量块由两个柔性导向件一方面悬挂到固定结构上,另一方面悬挂到传动件上;在本示例中,每个柔性导向件都包括两个条带,它们至少在与传动件平面平行的平面上的投影中相交;由这些交点限定的虚拟枢转轴线与这些柔性导向件一方面在固定结构上、另一方面在传动件上的附接点大致对齐;
-图45示出了在整体式实施例的情况下,优选使铰接机构所处的休止位置;从该休止位置开始,系统从图45到图51逐渐加载,并且柔性导向件自行从图51返回到图45;
-图46至48描绘了指状部在曲柄旋转期间的线性路径;
-图49附有一个细节图,示出了这里大致呈圆柱形的传动件的指状部开始与日期环的齿尖协作时的细节;
-图50附有一个细节图,示出了在有利于驱动日期环的位置,传动件的指状部与日期环的齿在齿侧壁处继续协作的细节,所述指状部离开线性路径并接近返回的曲线路径;
-图51至52描绘了在曲柄继续旋转期间指状部的曲线路径,其驱动日期环;自然地,环上的日期显示是特定的:日期不是按数字顺序显示的,而是根据与指状部在返回路径期间的曲线行程对应的角向步级分布的;
-图53附有一个细节图,示出了沿着日期环的齿的侧壁滑动的传动件指状部的协作结束时的细节;
-图54附有一个细节图,示出了传动件的指状部的退出,其离开曲线路径并接近线性路径,然后会恢复图46和之后的图所示的循环;
-图55以示意性的局部平面图示出了如图16所示的Klann机构应用于驱动例如显示轮或自动上条轮的外齿圈,其中传动件的远端布置成大致径向地穿入两个齿之间,然后在线性路径期间驱动齿侧壁,然后根据大部分绕过齿圈的曲线路径脱离齿圈,之后返回到驱动位置。
具体实施方式
对于特定的驱动机构,已知一种具有四个杆的铰接机构,其主杆是固定的,并且包括两个彼此不同(即,彼此区分开)的主铰接部;这些主铰接部中的每一个都在第一端处承载二级杆,并且每个二级杆都在其第二端通过二级铰接部铰接至三级杆。因此,这些二级铰接部中的每一个都描绘了一个被赋予的闭合路径,相当于单一自由度,即使该自由度既不是线性的也不是圆形的。
按照惯例,主杆在下文中将被称为“固定结构”,它尤其可以是钟表机芯或表壳的机板、桥夹板或其它结构元件,通过主铰接部铰接至该固定结构的二级杆将被称为“臂”,于是其它杆将根据它们与固定结构的运动学距离被称为例如三级杆、四级杆,这些三级杆和四级杆中的每个杆都通过铰接部铰接至该运动链中最上游的杆(或臂),所述铰接部带有最上游的所述杆(或所述臂)的名称:例如,三级杆通过二级铰接部铰接至二级杆或臂;四级杆通过三级铰接部铰接至三级杆。因此,当提到N杆机构时,这N个杆中的一个由固定结构组成。
因此,四杆机构通常包括主杆或固定结构,并且包括两个主铰接部;这些主铰接部中的每一个都在第一端处承载二级杆,并且每个二级杆都在其第二端通过二级铰接部铰接至三级杆,或者铰接至另一个杆。因此,这些二级铰接部中的每一个都描绘了被赋予的封闭路径,相当于单一自由度,即使这个自由度既不是线性的也不是圆形的。
这种四杆机构例如用于驱动电影放映机中的穿孔胶片。类似地,公交车挡风玻璃雨刷均安装在可变形平行四边形的三级杆上。
更一般地,四杆机构包括四个刚性主体,它们通常通过旋转连接装置(诸如球接头连接装置或枢轴)铰接在一起。在制表业所使用的整体式结构中,这些旋转连接装置可以由在同一平面内提供一个杆相对于另一个杆的足够角向自由度的颈部代替,或者由柔性条带或柔性条带组件代替。
这些铰接式引导系统允许执行有时很复杂的运动。
最著名的例子是特别用于公共汽车挡风玻璃雨刷的可变形平行四边形,以及缩放仪/受电弓(pantograph)。
使用不同长度的主杆可以执行不同的运动,比如在乘用车上,其中驾驶者和乘客的挡风玻璃雨刷的运动和行程不同。
四边形平面机构由可变形的四边形组成,形成四边形的各个边的杆通过真实或虚拟的枢轴连接装置连接在一起,例如在投影中具有交叉柔性条带的柔性枢轴等。
木马或旋转木马的升降机构由可变形的平行四边形引导。可变形的平行四边形允许进行圆形平移运动;这允许保留被操纵对象在空间中的取向,特别是相对于水平面的取向。
曲柄-连杆-振荡器机构允许将交替运动转换成连续旋转运动,或者反之。众所周知,为了驱动脚踏式缝纫机:使用者在踏板上的动作产生踏板的振荡运动,其驱动旋转式曲柄,以便驱动缝纫机。
缩放仪机构允许执行相似运动,并放大或缩小运动幅度。
Watt平行四边形是一种交叉平行四边形,它允许沿着被赋予的曲线获得特定的引导,这被称为伪线性引导。因此,在货车悬架上,轴支承件通过两个铰接杆悬挂在货车结构上,这些铰接杆彼此平行并且相对于轨道的距离不同,每个铰接杆都通过主铰接部连接至货车,并通过二级铰接部连接至轴箱,因此,车轮中心相对于货车的路径遵循S形曲线,该曲线在其中心部分几乎是直线。
另一种旨在执行伪线性运动的机构是一种三杆机构,称为Chebyshev铰接机构,其形成曲柄-连杆-活塞系统。二级铰接部中的一个被滑动机构代替:一个二级杆的端部在另一个二级杆上滑动,该另一个二级杆是承受负载的杆,其形式例如为在长形槽中行进的耳轴,或在滑动件中的滑道,或类似装置,因而不再需要三级杆。承受负载的二级杆的一个点描绘了一条重复性的闭合曲线。通过对长度的特定调节,该闭合曲线的一部分可以是直线。Chebyshev所谓的λ机构(由于其形状)是一种四杆机构,其将旋转运动转换成近似直线运动,在从退出点开始的一部分路径上具有近似恒定的速度。三级杆在两个二级铰接部之外延伸,远离这两个二级铰接部的一个点在其一部分行程上遵循直线路径,并经由曲线路径返回其起点。因此,它对于任何逆行式钟表显示都是有利的。这种机构要求在主铰接部之一上的曲柄类型的连续旋转,这将其应用限制在特定场合,因为它不是完全平面的。
具有三个杆的Hoeckens机构接近于Chebyshev铰接机构,并且也能够在其大部分行程上将旋转运动转换成大致直线运动。铰接至固定结构的第一铰接部承载连接杆,该连接杆被驱动进行圆周运动,并与长杆铰接,该长杆在滑动件中滑动,该滑动件本身铰接在固定结构的第二点处。
像前一种机构一样,这种机构用于医疗机器人,其应用示例可以在2012年2月9日斯特拉斯堡大学Mathieu Joinie-Maurin的博士论文(第69页及后面的页码)中阅读。
存在更精确但更复杂的装置,例如Peaucellier-Lipkin装置,它是一种铰接系统,允许将直线运动转换成圆周运动,或者反之,并且是基于圆的反演(inversion of acircle)的几何原理,它包括七个刚性杆。实际上可以用较少的杆来解决直线运动的问题,与Hart逆变器类似,最少为五个杆,但仅需要五个杆就可实现大致等效的结果。
Roberts机构也将旋转运动转换成近似线性运动。三级杆是等腰三角形的底边,该等腰三角形的长度相同的两条侧边具有与二级杆相同的长度,并且当其中一个二级杆或底边由于交替旋转运动被动画化时,该等腰三角形的与底边相对的顶点遵循在主铰接部的线上或平行于这条线的直线运动。
Klann机构是一种平面机构,其设计为避开路径上的障碍物,例如模拟有腿动物的步伐并替代轮子。该机构由与地面接触的腿部、曲柄、两个杠杆臂和两个连接杆组成,所有这些都通过枢轴连接部连接。该机构中每个连接部的比例被限定为在曲柄的一半旋转期间优化腿部的线性运动。曲柄的剩余旋转使得腿部能够在返回到起始位置并重复循环之前升高至预定高度。两个机构一起联接到曲柄并异相半个周期,使得车辆的底盘能够平行于地面移动。Klann机构的运动学是基于将相对运动赋予每个杆的机械连接装置。它将旋转运动转换成线性运动。文献US6260862描述了这种机构。尽管其运动学比具有三个或四个杆的机构更复杂,以及尽管需要三个层级,但是Klann机构具有以下优势:其能够生成复杂路径,从而确保不会与障碍物发生碰撞,并且这以一种完全可重复的方式实现。
应当理解的是,所有这些机构都有一个共同特征:至少一个特定的点始终遵循同一闭合路径,因此沿着该路径具有单一自由度。更具体地,对于这些机构中的一些,该路径的至少一部分是大致线性的或线性的。通常,该路径的其余部分接近于圆弧或抛物线或类似形状。
本发明提出将这些机构中的一些结构的特性应用于控制某些钟表功能,特别是显示功能。事实上,现代微加工技术和“LIGA”、“MEMS”或类似类型工艺的实现允许获得将复杂功能组合在一起的整体式部件,特别是在振荡器内。在制表业所使用的这些整体式结构中,传统机械机构的旋转连接装置,例如球接头连接装置或枢轴,可以由颈部代替,所述颈部在同一平面中提供从一个杆相对于另一个杆的足够的角向自由度。
许多上述机构非常适合于平面上实现,这在制表技术中是有利的。其它机构,无论是否被连续驱动旋转,都需要在二级平面中的曲柄,该二级平面平行于主平面,除了曲柄的铰接部之外的所有铰接部都位于该主平面中。其它机构需要更多层级,比如图16中所示的Klann机构;尽管如此,整体体积仍然有限,并且仍然与制造钟表复杂机构兼容。
因此,本发明涉及一种用于钟表机构的铰接机构100,其布置成用于在致动器与接收器之间进行运动传递。
根据本发明,该铰接机构100包括固定结构10,传动件9在这种致动器的作用下可相对于该固定结构根据单一自由度移动,该传动件9通过至少一个柔性导向件50连接至固定结构10,所述传动件9和所述固定结构10中的每一者都比每个柔性导向件50刚度更大。
更具体地,该传动件9可根据除了枢转自由度之外的单一自由度移动,因此该传动件9的每个点都遵循除了圆形之外的路径。
传动件9在致动器的作用下移动,仅由柔性导向件50根据所述自由度引导。特别地,当传动件不向接收器传递任何运动时,仅柔性导向件50使传动件9能够遵循所述自由度。换言之,铰接机构100或钟表机构的任何其它部分都没有作用在传动件9上以使其遵循所述自由度。致动器仅向传动件9提供致动力,并且柔性导向件50使传动件9沿着所述自由度定向。
当传动件9与接收器接触以向其传递运动时,接收器不影响由柔性导向件50限定的自由度。因此,接收器在该唯一的自由度上不起作用。
通过其柔性,柔性导向件50限定了传动件9遵循的路径,并且该路径对应于所述唯一的自由度。例如,所述唯一的自由度是围绕一表面或容积的闭合路径,其优选地是部分曲线的。更具体地,传动件9通过多个柔性导向件50连接到固定结构10。
更具体地,传动件9与固定结构10之间的仅有连接装置属于柔性导向件类型:传动件9仅通过一个柔性导向件50或若干柔性导向件50连接到固定结构10。
更具体地,至少一个柔性导向件50是平面的,并且包括柔性颈部51,该柔性颈部51的截面小于其相邻的元件,并且形成铰接部,和/或至少一个柔性导向件50包括柔性条带5、6、52,其截面小于相邻的元件,并且形成铰接部。附图非限制性地示出了直的柔性条带,显然这些柔性条带可以是曲线的、弯曲的,或者采用复杂的形状,例如之字形或其它形状。
甚至更具体地,每个柔性导向件50都是平面的,并且包括柔性颈部51,其截面小于相邻的元件,并且形成铰接部,和/或每个柔性导向件50包括柔性条带5、6、52,其截面小于相邻的元件,并且形成铰接部。
特别地,该铰接机构100包括至少两个臂1和2,它们在两个不同的点处铰接至结构10,这些臂1和2布置成彼此运动学地协作,或者与三级杆12或三级结构120——例如不可变形的三角形121或可变形的四边形122等——运动学地协作。有利地,该三级杆12或该三级结构120形成所述传动件9。
铰接机构100包括在结构10与第一臂1之间的第一主铰接部11,以及在结构10与第二臂2之间的第二主铰接部21,并且:
-要么第一臂1在距第一主铰接部11一定距离处包括具有柔性连接部的平移导向件或包括滑动元件18,该滑动元件18布置成与互补的滑动元件28以铰接方式可滑动地协作,该滑动元件28在距第二主铰接部21一定距离处包括形成传动件9的第二臂2,如图5至7所示;
-要么铰接机构100在距第一主铰接部11一定距离处包括在第一臂1与传动件9之间的第一二级铰接部110,并且在距第二主铰接部21和距第一二级铰接部110一定距离处包括第二二级铰接部210,该第二二级铰接部210在第二臂2与传动件9之间,或在第二臂2和与传动件9铰接的操作杆4之间。
图6示出了第一种情况,在两个臂之间具有滑动件,其中第一臂1在距第一主铰接部11一定距离处包括滑动元件18,该滑动元件18布置成与互补的滑动元件28以铰接方式可滑动地协作,该滑动元件28在距第二主铰接部21一定距离处包括形成传动件9的第二臂2。
图8示出了第二种情况,其中铰接机构100在距第一主铰接部11一定距离处包括在第一臂1与传动件9之间的第一二级铰接部110,并且在距第二主铰接部21和距第一二级铰接部110一定距离处包括第二二级铰接部210,该第二二级铰接部210在第二臂2与传动件9之间或在第二臂2和与传动件9铰接的操作杆4之间。这些铰接部中的至少一个,例如在该图的情况下的第一主铰接部11和第二主铰接部21,可以是枢轴连接部,其能够实现360°旋转,因而需要由传统导向件来实现,其在柔性导向装置中不可行。
在一个变型中,根据Chebyshevλ机构的运动学通过传统铰接部的替代物来确保:图43因此示出了铰接机构100,其包括顺次设置在传动件9与结构10之间的两个柔性导向件50,它们由中间惯性质量块51分隔开,这两个柔性导向件50都紧固在中间惯性质量块51上或与之形成整体式组件。每个柔性导向件50都包括设置在两个平行平面中的两个柔性条带5和6,并且这两个柔性条带在这些平面之一上的投影相交;在平面投影中,第一方向D1通过这些交叉点的对齐来限定,第二方向D2通过一方面在形成图8的第二臂2的未示出的曲柄的端部处具有轴线D9的枢轴与另一方面传动件9的远端90之间的对齐来限定:距结构10最远且距传动件9最近的柔性条带5和6的交叉点相当于第一臂1与传动件9之间的第一二级铰接部110;它对应于方向D1和D2的交点。
在一个变型中,如图13至15所示,铰接机构100形成Peucelier-Lipkin机构,并且同一铰接部承载多个臂,此处第一铰接部11承载两个第一臂1和118。
在一个变型中,如图5至7所示,铰接机构100形成Chebyshev铰接机构,第一臂1包括滑动元件18,该滑动元件18布置成与第二臂2承载的互补滑动元件28可滑动地协作。
在不同的变型中,特别是在图1、2、4、8、9、11至15所示的变型中,铰接机构100在距第一主铰接部11一定距离处包括在第一臂1与传动件9之间的第一二级铰接部110,并且在距第二主铰接部21和距第一二级铰接部110一定距离处包括第二二级铰接部210。该第二二级铰接部210布置在第二臂2与传动件9之间,或布置在第二臂2与直接或间接地与传动件9铰接的操作杆4之间,比如在形成Klann机构的图16的变型中。
在图16的该变型中,操作杆4在第一操作铰接部24处与第二臂2铰接,以及在第二操作铰接部49处与传动件9铰接。并且结构10包括布置成引导第三杆3旋转的枢轴30,该第三杆3在远离枢轴30的第三二级铰接部31处与操作杆4铰接。
在一个变型中,至少一个柔性导向件50包括至少两个平行的平面层级,并且在每个层级中包括柔性条带5、6、52,这些柔性条带的截面小于与其相邻的元件,这些柔性条带的方向相交叉并且这些方向的交叉点在平行于所述层级的平面上的投影限定了虚拟枢转轴线和铰接部,如图43至54所示。
更具体地,传动件9、结构10和至少一个柔性导向件50是共面的。甚至更具体地,传动件9、结构10和每个柔性导向件50是共面的。
在一个变型中,传动件9是第三杆。
在一个变型中,传动件9是多边形刚性结构,比如在图11和12的实施例中,其中铰接机构100形成Roberts机构,具有由等腰三角形121形成的不可变形结构120。
在一个有利的变型中,传动件9在远端90处包括用于驱动接收器的钩状部或指状部或齿。
在许多变型中,第一臂1或第二臂2布置成由致动器驱动。但是致动器的驱动也可以在铰接机构100的中间杆处完成。
在Klann机构的一个特定变型中,第三杆3布置成由致动器驱动。
更具体地,如图43所示,铰接机构100包括顺次设置在传动件9与结构10之间的至少一个或多个柔性导向件50,其中至少两个相继的柔性导向件50由它们都紧固在其上或与之形成整体式组件的中间惯性质量块51分隔开。
更具体地,至少一个柔性导向件50包括具有两个单独的交叉条带的枢轴,或具有两个一体式交叉条带的枢轴,或具有两个正交条带的RCC枢轴,或具有4个颈部的RCC枢轴,或至少局部平行的至少两个条带,或具有柔性轴颈连接部的平移导向件。图19类型的线性柔性导向件允许实现无摩擦滑动。
更具体地,铰接机构100是一种包括至少一个柔性导向件50的复合机构,柔性导向件50由硅和/或氧化硅制成,或由通过“LIGA”或“MEMS”等工艺成形的可微加工材料制成,该柔性导向件通过销钉和/或螺纹和/或胶粘和/或夹持连接方式或制表师公知的其它机械连接方式机械地紧固到传动件9和结构10上。
更具体地,铰接机构100是整体式机构。
有利地,远端90的路径T包括至少一个线性或大致线性区段T1。更具体地,远端90的整个路径T是线性的或大致线性的。更具体地,远端90的路径T形成8字形,其可以非常扁平,这取决于被施加在铰接机构上的杠杆臂,并且8字形的环的交叉部分非常接近线性行程。
更具体地,远端90的路径T包括对应于远端90在第一方向上的第一行程T1的线性或大致线性区段,以及连接该区段的端部的凹形曲线,该凹形曲线对应于远端90在与第一方向相反的第二方向上的第二行程T2。
本发明还涉及一种钟表机构500,其包括致动器和接收器,以及至少一个这样的铰接机构100,该铰接机构100布置成用于在致动器与接收器之间进行运动传递。
在一个变型中,传动件9布置成通过直接接触、或通过按压件或杠杆、特别是通过其远端90来驱动接收器。
在一个变型中,致动器布置成在整个控制行程上对铰接机构100施加连续的力,以用于接收器的足够行程。
在一个变型中,致动器布置成在铰接机构100上施加冲击,以将足够的冲击传递给接收器。
在一个变型中,致动器固定到柔性导向件50的元件之一,或与柔性导向件50的元件之一铰接。
致动器可以采取不同的形式:
-旋转驱动机构,特别是齿轮系的元件(例如在图23和30中),特别是用于曲柄型驱动,例如在图43至54中;
-耙式驱动(rake drive)机构,如图56所示,具有与第二臂2包括的带齿部段206协作的轮602;
-凸轮驱动机构,如图57所示,具有与第二臂2包括的触探指状部207协作的凸轮702。
在一个特定实施例中,铰接机构100是Hoeckens机构,其布置成将致动器施加的旋转转换成接收器的线性逆行运动。
在一个特定实施例中,铰接机构100是Roberts机构,其布置成将致动器施加的旋转转换成接收器的线性逆行运动,传动件9的远端90是三角形121的顶点,三角形121的其它顶点铰接至铰接机构100所包括的铰接臂1、2。
在一个特定实施例中,铰接机构100是Klann机构,其布置成将致动器施加的连续旋转转换成在接收器所包括的齿圈或承载表面上的周期性驱动式推动。图55示出了这样的示例,三角形固定结构10包括三个铰接部101、102、103;第三杆3在第一端31处铰接至铰接部103,且其第二端32被驱动进行圆周运动。特定的运动学赋予大致成直角的路径T,这使得远端90能够绕过轮齿而不接触它,以便在循环结束时推动该轮齿。
在一个特定实施例中,铰接机构100是Chebyshevλ机构,其布置成将致动器施加的连续旋转转换为在接收器所包括的齿圈或承载表面上的周期性驱动式推动。
在一个特定实施例中,铰接机构100是Chebyshev铰接机构,其布置成将致动器施加的旋转转换成接收器的线性逆行运动。
本发明还涉及一种钟表机芯1000,其包括至少一个这样的钟表机构500,和/或至少一个这样的铰接机构100。
这些机构的优选实施例包括柔性导向件50,钟表机构500或铰接机构100当然也可以包括至少一个传统的旋转或平移导向件。
本发明还涉及一种手表2000,其包括至少一个这样的钟表机芯1000,和/或至少一个这样的钟表机构500,和/或至少一个这样的铰接机构100。
图23至28示出了本发明的第一种应用,其将包括柔性导向件的铰接机构用于逆行显示,其中旋转被转换成月相遮挡件79的线性运动,逐渐覆盖或露出月球的清晰图示78。
图29至41示出了用于相同应用的不同布置的机构。这两个非限制性示例证明本发明能够克服钟表机芯内部的几何障碍,因为这些机构(其在这里为整体式的,但不限于此)允许避开手表的其它组成部分,并利用最小的可用空间。
以同样的方式,很容易植入根据图12的Roberts机构。
图42至54示出了Chebyshevλ机构类型或类似类型的曲柄机构的应用,以确保覆盖在第一方向上是直的且在第二方向上弯曲的路径,以便致动日期盘。
图55使用Klann致动机构,其致动齿圈,以便例如驱动显示器或自动上条轮。传动件的路径更复杂,它允许较大的间隙,以及在轮的两个齿之间的大致径向回退。
总之,根据本发明的机构充分利用了手表中的可用空间,并通过使摩擦最小化来提高整体效率。
将本发明应用于显示机构的优点是,将旋转运动转换成平移运动以用于具有单一自由度的线性显示器。
将本发明应用于致动机构的优点是,能够利用运动学致动齿圈,从而允许最小的摩擦。实际上,在现有技术的情况下,致动器与齿相接触并绕过它。需要接触才能绕过齿。一般而言,当传动件是钩或类似物时,钩的背面,即与包括旨在改变齿圈位置的承载表面的部分相对的部分,在该承载表面驱动齿之前抵靠所述齿摩擦,因而存在大面积的摩擦和磨损,这对机构的效率及其随时间的耐用性是有害的。另一方面,在本发明的情况下,柔性导向件引导致动器以非接触方式绕过齿,铰接机构的运动学实际上实现了大致径向的接近,则致动器仅为了致动齿才与齿接触。因此,减小了摩擦面积,以及由于摩擦而损失的能量。图49和50的细节图示出了在直线路径T1与曲线路径T2之间使用具有小曲率半径的区域,以确保这种最佳运动学。
在这些应用中使用的柔性导向件在手表制造中具有巨大潜力,因为它们具有以下特性和优势:
-没有磨损;
-没有润滑;
-没有抱死;
-没有粉尘排放;
-没有滞后现象;
-精确性和可重复性;
-重复性路径的控制和精确性;
-系统中没有反冲。