基于振动的MU检测
文献发布时间:2023-06-19 19:38:38
技术领域
本公开总体涉及的领域包括用于估计道路表面与轮胎表面之间的摩擦系数的系统。
背景技术
摩擦系数——通常称为mu或μ——是指示两个物体之间存在的摩擦力的比率。在车辆的情况下,mu可以表示当车辆在运动中时道路表面与车辆轮之间存在的动态摩擦力。当存在滑移(slip)状况(诸如应用防抱死制动系统)时,可以在道路表面和车辆轮之间估计mu,或者当通过改变车辆的转向角来转动轮时,可以根据横向mu估计系统在道路表面和车辆轮之间估计mu。滑移状况和横向摩擦可能不同时发生,并且有时,在车辆使用期间可能存在几乎到没有的滑移状况或横向摩擦。因此,在某些驾驶情形和操作环境期间,mu可能不容易确定。
发明内容
多个说明性变型可以包括用于通过监视声学信号和振动特性(vibrationsignature)来针对各种道路表面、操作环境和驾驶场景进行准确mu值估计和生成的方法或产品。声学信号和振动特性可以用于执行特征提取信号处理技术,并被进一步处理和变换以生成mu值。
一种mu估计的系统和方法可以包括经由多个传感器收集道路表面上的车辆行驶数据;对车辆行驶数据执行特征提取处理,以将车辆行驶数据变换成经处理的车辆行驶数据;将经处理的车辆行驶数据传送到机器学习模型;以及经由机器学习模型生成道路表面的所估计mu值或道路表面分类中的至少一个。
一种mu估计的系统和方法可以包括以下步骤:经由包括加速度计或麦克风中的至少一个的多个传感器近似持续地收集道路表面上的车辆行驶数据;通过网络近似持续地收集外部源数据;聚集车辆行驶数据和外部源数据以形成聚集数据集;对聚集数据集执行特征提取处理,以变换聚集数据集并且成为经处理的聚集数据集;将经处理的聚集数据集传送到机器学习模型;以及经由机器学习模型生成道路表面的所估计mu值或道路表面分类中的至少一个。
一种用于基于振动的mu估计的系统可以包括:与网络可操作连接的至少一个计算设备;存储计算机可执行组件的存储器;以及执行存储在存储器中的计算机可执行组件的处理器。计算机可执行组件可以包括经由多个传感器近似持续地收集道路表面上的车辆行驶数据;通过网络近似持续地收集外部源数据;对车辆行驶数据和外部源数据执行特征提取处理,以将车辆行驶数据和外部源数据变换成经处理的车辆行驶数据和经处理的外部源数据;将经处理的车辆行驶数据和经处理的外部源数据传送到机器学习模型;以及经由机器学习模型生成道路表面的所估计mu值或道路表面分类中的至少一个。
根据下文提供的详细描述,本发明范围内的其他说明性变型将变得清楚。应该理解的是,详细描述和具体示例虽然公开了本发明的变型,但是仅仅意图用于说明的目的,而不意图限制本发明的范围。
附图说明
根据详细描述和附图,本发明范围内的变型的选择示例将变得更充分地被理解,其中:
图1描绘了用于基于振动的mu检测和估计的系统的框图;
图2描绘了用于基于振动的mu检测和估计的系统的框图;
图3描绘了用于基于振动的mu检测和估计的系统的框图;和
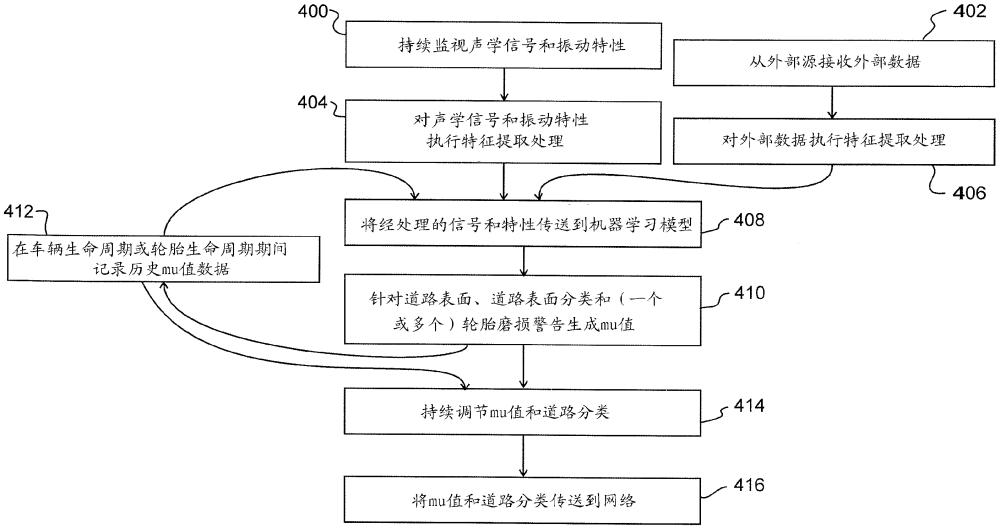
图4描绘了用于基于振动的mu检测和估计的系统的一个变型的说明性流程图。
具体实施方式
以下对变型的描述本质上仅仅是说明性的,并且决不意图限制本发明的范围、其应用或用途。
如本文所使用的,术语“近似”和关于该术语的变型指示测量、位置、定时等允许值的某种不精确,即在值的精确性方面具有某种变化;大约或相当接近一值;或者差不多。如果由于某种原因,“近似”所提供的不精确以其他方式在本领域中不以这种普通含义来理解,那么如本文使用的“近似”至少指示可能由测量或使用这样的参数的普通方法所产生的变化。
如本文所使用的,“多个轮”或“轮”即使当被描述性形容词修饰时——诸如但不限于在“可转向车轮”、“可转向轮”、“车轮”或“从动轮”的叙述中——也可以指代传统的车轮和轮胎布置,但也可以指代对传统的车轮和轮胎布置的任何修改,诸如但不限于无轮辋磁性轮胎、球形轮胎或任何其他已知的汽车移动手段,其中一个轮或多个轮至少部分与道路表面接触。
如本文所使用的,“道路”即使当被描述性形容词修饰时也可以指代传统的驾驶表面道路,诸如但不限于混凝土或沥青道路,但也可以指代货物或乘客的车辆可以沿着其或通过其行驶的任何驾驶表面或介质,诸如但不限于水、冰、雪、泥土、泥浆、空气或其他气体,或一般的空间。
如本文所使用的,“操作环境”可以广义地指代车行道、高速公路、街道、路径、停车场、停车结构、隧道、桥梁、交通路口、住宅车库或商业车库。设想到操作环境可以包括车辆可到达的任何位置或空间。
如本文所使用的,“计算设备”或“计算机”可以广义地指代被构造和布置成执行本公开中描述的过程和步骤的系统。计算机设备可以包括一个或多个处理器,所述处理器通过耦合诸如输入/输出(I/O)设备之类的各种系统组件的系统总线与存储器可操作地通信。适于执行计算机可读程序指令或过程的处理器可以包括通用和专用微处理器两者以及任何数字计算设备的任何一个或多个处理器。计算设备可以包括独立计算机或移动计算设备、智能设备、大型计算机系统、工作站、网络计算机、台式计算机、膝上型计算机等等。计算设备可以是包括处理器、存储器、数据存储装置等组件的组合,所述组件与车辆内的各种系统可操作地通信,所述各种系统诸如但不限于电子转向系统、牵引力控制系统、自主和半自主驾驶系统等。
在多个说明性变型中,当扭矩被传递到轮时,诸如但不限于牵引力控制系统(TCS)或发动机稳定性控制(ESC)之类的滑移控制系统可以用于防止车辆的轮由于低表面摩擦系数而空转。因此,滑移控制系统可以用于通过基于所感测的轮滑移而选择性地向轮传递动力来促进车辆稳定性,从而防止从每个轮传递到车辆的驱动力中的意外不平衡。
在多个说明性变型中,滑移控制系统(诸如但不限于防抱死制动系统(ABS))可以用于防止车辆的轮在制动时由于低表面摩擦系数而抱死。电子制动分配(EBD)也可以用于调整后制动器与前制动器或者左制动器与右制动器之间的偏置。因此,滑移控制系统可以用于通过基于所感测的轮滑移而选择性地制动轮来促进维持的转向控制,从而防止从每个轮传递到车辆的制动力中的意外不平衡。
在多个说明性变型中,一种转向系统可以包括并入TCS、ESC、ABS、EBD等的自主滑移控制系统。在这样的说明性变型中,滑移控制系统可以集成到自主转向系统的车辆控制系统中或者与所述车辆控制系统通信,所述自主转向系统包括但不限于推进系统,包括但不限于发动机控制系统、制动控制系统和车辆转向系统。
在多个说明性变型中,表面摩擦系数——其也可以称为表面摩擦的系数、表面粘附系数或表面摩擦因子——可以用作可以在驾驶表面与车辆的轮之间传输的力的量的度量。除了从外部源接收信息之外,摩擦系数或mu值可以由系统经由被构造和布置成持续监视道路和车辆状况的多个传感器和系统来估计,使得车辆内的系统可以补偿所估计mu值和道路表面分类。
多个说明性变型可以包括用于通过监视声学信号和振动特性来针对各种道路表面、操作环境和驾驶场景进行准确mu值估计和生成的方法或产品。声学信号和振动特性可以用于执行特征提取信号处理技术,诸如但不限于,利用用于声学信号的梅尔滤波器组或用于振动信号的连续小波变换(CWT)。声学信号和振动特性可以经由预先训练的机器学习模型或神经网络进一步处理和变换,以生成所估计mu值。所估计mu值可以被传送到车辆系统(诸如滑移控制系统),以补偿mu值或道路表面分类中的变化。
一种用于mu值估计的系统可以包括通过至少一个麦克风来监视或记录声学信号,所述麦克风近似地设置在车辆的轮舱或适合于测量声压的其他合适位置内。该系统可以并入来自各种其他源的各种其他数据集,诸如轮胎压力监视系统(TPMS)、道路表面数据、GPS位置数据、天气数据等。设想到用于mu估计的其他产品和方法落入本公开的范围内,并且包括至少一个麦克风的本文所描述变型不应被认为相对于如何测量声压是限制性的。该系统可以聚集数据,诸如基于加速度计的振动信号、声学压力信号、TPMS数据等,以处理各种信号和数据,所述信号和数据可以被馈送到预先训练的机器学习模型,以生成特定驾驶场景中道路表面的mu值。
用于mu值估计的系统可以包括至少一个加速度计,所述加速度计近似地定位在转向节附近,或者替代地在轮胎压力传感器附近或者作为轮胎压力传感器的一部分,所述加速度计可以监视或记录轮、转向组装件或车辆的各种其他部件和部分中的振动特性。设想到用于mu估计的其他产品和方法落入本公开的范围内,并且包括加速度计的使用的本文所描述变型不应被认为相对于如何测量、监视或记录振动特性是限制性的。
至少一个麦克风可以与至少一个计算设备可操作地通信,所述计算设备被构造和布置成接收由所述至少一个麦克风观察到的声学信号。所述至少一个加速度计还可以与所述至少一个计算设备可操作地通信,所述至少一个计算设备被构造和布置成接收由所述至少一个加速度计监视或记录的振动特性。
用于基于振动的mu估计和检测的系统可以进一步包括接触传感器系统,其被构造和布置成检测和分类变化的声音信号,诸如低速撞击。
用于基于振动的mu估计和检测的系统可以与诸如车辆到一切(V2X)网络之类的网络可操作地通信,使得该系统可以接收道路数据,其包括道路表面信息、GPS车辆位置数据、天气和气候数据以及各种其他信息。除了生成mu值之外,由系统接收的外部来源的数据可以用于确定道路表面分类。
该系统可以进一步计及各种因素,诸如车辆轮胎内的充气、车辆轮舱内的雪或泥土堆积、变化的轮胎类型(诸如夏季、冬季、所有季节等),使得在其中检测到不同移动性能的给定驾驶情形内,可以基于车辆的特定响应来持续调节生成的mu值。
用于mu值估计的系统可以接收前述数据集,并执行特征提取信号处理技术、诸如利用用于声学信号的梅尔滤波器组或用于振动信号的连续小波变换,使得经处理的数据集可以被馈送到被构造和布置成生成mu值的预先训练的机器学习模块。mu值的特征提取和计算可以在车辆内的计算设备内本地发生,或者可以经由基于云的计算系统上的V2X网络发生。机器学习模块可以使用基于回归的神经网络对道路类型进行分类并生成mu值,并且可以被构造和布置成通过标识独特的特征变化来降低数据集中的噪声。除了诸如轮胎磨损警告之类的各种其他输出之外,预先训练的机器学习模块可以生成道路表面分类和mu估计。道路表面分类和mu估计可以进一步用于基于底盘性能评估来生成限定的mu数字。附加地,该系统可以将基于GPS车辆位置、V2X数据和mu估计的历史数据与当前GPS车辆位置、V2X数据和mu估计进行比较,以持续调节mu估计的值门限。
用于mu值估计的系统可以从测试车辆收集数据,其中具有轮胎和底盘布置的已知组合的测试车辆车队可以在测试车队中操作,并且数据可以经由测试车队的每个车辆中的多个传感器收集。收集的数据可以被上传到中央服务器,其中数据可以与每个个体车辆的轮胎和底盘布置的已知组合的已知mu值相匹配。除了其他特征提取方法之外,匹配的数据可以使用变换(诸如但不限于经由梅尔滤波器组或连续小波变换的特征提取)被馈送到机器学习模型。机器学习模型然后可以被训练以根据训练数据生成输出,并且使用新的可用的先前未见数据进行测试。该数据可以包括基于加速度计的振动信号、声学压力信号、TPMS数据、道路表面信息、GPS车辆位置数据以及天气和气候数据,这些数据将在车辆在现场的正常操作期间可用。
数据集可以进一步被操控以生成与基于加速度计的振动信号、声学压力信号、TPMS数据、道路表面信息、GPS车辆位置数据以及天气和气候数据相关联的置信数字。
参考图1,作为非限制性示例,基于振动的mu检测系统24可以包括与多个传感器46可操作地通信的至少一个计算设备20。所述多个传感器46可以包括加速度计12、被构造和布置用于声学压力感测的麦克风14、接触传感器系统16和轮胎压力监视系统18。所述至少一个计算设备20可以与车辆上的各种其他传感器通信。所述至少一个计算设备20可以与网络22和第二计算设备48可操作地通信。所述至少一个计算设备20可以经由网络22从外部源接收各种数据集,诸如道路表面数据、GPS位置数据、天气数据等。替代地,所述至少一个计算设备20可以从车辆车载的附加传感器和系统接收各种数据集,诸如道路表面数据、GPS位置数据、天气数据等。
第二计算设备48可以经由网络22并且从所述至少一个计算设备20接收传感器数据。除了其他特征提取方法32之外,第二计算设备48可以经由梅尔滤波器组28或连续小波变换30而经由特征提取26处理接收的数据。经处理的数据可以被传送到预先训练的机器学习模型34,其被构造和布置成对道路类型36进行分类,生成mu值38,并生成车辆中的轮胎磨损警告40。可以进一步处理道路类型36和mu值38,以基于底盘性能的评估来限定mu值38。mu值38可以进一步被处理并与由GPS所确定的或经由网络22接收的与车辆当前位置相关的历史数据进行比较,以进一步限定mu值38,从而生成道路表面分类42并生成细化的mu值44。
参考图2,作为非限制性示例,基于振动的mu检测系统24可以包括与多个传感器46可操作地通信的至少一个计算设备20。所述多个传感器46可以包括加速度计12、被构造和布置用于声学压力感测的麦克风14、接触传感器系统16和轮胎压力监视系统18。所述至少一个计算设备20可以与车辆上的各种其他传感器通信。所述至少一个计算设备20可以与网络22可操作地通信。所述至少一个计算设备20可以经由网络22从外部源接收各种数据集,诸如道路表面数据、GPS位置数据、天气数据等。替代地,所述至少一个计算设备20可以从车辆车载的附加传感器和系统接收各种数据集,诸如道路表面数据、GPS位置数据、天气数据等。
所述至少一个计算设备20可以经由网络22并且从所述至少一个计算设备20接收传感器数据。除了其他特征提取方法32之外,所述至少一个计算设备20可以经由梅尔滤波器组28或连续小波变换30而经由特征提取26处理接收的数据。经处理的数据可以被传送到预先训练的机器学习模型34,其被构造和布置成对道路类型36进行分类,生成mu值38,并生成车辆中的轮胎磨损警告。可以进一步处理道路类型36和mu值38,以基于底盘性能的评估来限定mu值42。mu值38可以被进一步处理44,并与由GPS所确定的或经由网络22接收的与车辆当前位置相关的历史数据进行比较,以生成道路表面分类42并生成细化的mu值44。
参考图3,作为非限制性示例,基于振动的mu检测系统24可以包括与多个传感器46可操作地通信的至少一个计算设备20。所述多个传感器46可以包括加速度计12、被构造和布置用于声学压力感测的麦克风14、接触传感器系统16和轮胎压力监视系统18。所述至少一个计算设备20可以与车辆上的各种其他传感器通信。所述至少一个计算设备20可以被构造和布置用于网络连接性22。所述至少一个计算设备20可以从车载源接收各种数据集,诸如道路表面数据、GPS位置数据、天气数据等。
所述至少一个计算设备20可以从所述多个传感器46和车载源接收传感器数据。除了其他特征提取方法32之外,所述至少一个计算设备可以经由梅尔滤波器组28或连续小波变换30而经由特征提取26处理接收的数据。经处理的数据可以被传送到预先训练的机器学习模型34,其被构造和布置成对道路类型36进行分类,生成mu值38,并生成车辆中的轮胎磨损警告。可以进一步处理道路类型36和mu值38,以基于底盘性能的评估来限定mu值38。mu值38可以被进一步处理44,并与由GPS所确定的或经由网络22接收的与车辆当前位置相关的历史数据进行比较,以生成道路表面分类42并生成细化的mu值44。
参考图4,作为非限制性示例,描绘了基于振动的mu检测系统的说明性变型的流程图。该说明性变型中的许多步骤可以根据图4的说明性描绘循环地或不按顺序地执行。根据步骤400,基于振动的mu检测系统可以包括监视致动行为、车辆环境、车辆动力学和其他车辆系统状态的车辆水平信号。可以贯穿所有步骤持续收集车辆行驶数据,诸如但不限于轮速、温度、振动或压力数据、车辆速度、加速度、偏航或俯仰数据、制动数据(诸如温度)、手轮角度、位置或扭矩数据、小齿轮扭矩或角度数据、齿条力、来自光学设备(诸如但不限于光学传感器或相机)的成像数据或者与车辆的行驶方面相关的任何其他数据。在步骤402处,可以贯穿在步骤402处开始的所有步骤持续收集外部数据,诸如但不限于GPS车辆位置、天气数据、道路表面数据、V2X数据等。在步骤404中,该系统可以基于在步骤400中收集的车辆水平信号执行特征提取,并且在步骤408中将经变换和处理的车辆行驶数据传送到机器学习模型。在步骤406中,该系统可以对在步骤402中收集的外部数据执行特征提取处理,并且在步骤408中将经变换和处理的外部数据传送到机器学习模型。在一些实例中,可以在对单个数据集执行特征提取之前组合车辆行驶数据和外部数据。在一些实例中,外部数据在被提供给机器学习模型之前,可以经由系统之外的特征提取进行预处理。在步骤410中,经处理的车辆行驶数据和外部数据可以用于生成道路表面——并且特别是车辆当前可能正行驶在其上或车辆可能正逼近的道路表面——的所估计mu值。该系统可以进一步基于车辆行驶数据和外部数据生成道路表面分类并估计车辆轮胎磨损。在步骤412中,生成的mu值、道路表面分类或轮胎磨损估计可以被记录为用于估计车辆生命周期或轮胎生命周期的历史数据。历史数据也可以被传送到机器学习模型,并且被并入到车辆行驶数据和外部数据中,使得mu值、道路表面分类和轮胎磨损可以被更准确地测量和估计。在步骤414中,mu值估计、道路分类和轮胎磨损可以基于历史数据和持续接收的车辆行驶数据和外部数据来持续调节或调整。在步骤416中,除了历史数据、车辆行驶数据和外部数据之外,mu值估计道路分类可以被传送到与该系统可操作地通信的网络,使得所述数据可以被传送到实现该系统的其他车辆,以进一步促进跨多个车辆进行准确的mu值估计和道路分类。
以下对变体的描述仅是对被认为在本发明范围内的组件、元件、动作、产品和方法的说明,并且不以任何方式意图通过具体公开或未明确阐述的内容来限制这样的范围。如本文所描述的组件、元件、动作、产品和方法除了如本文所明确描述的之外还可以被组合和重新布置,并且仍然被认为在本发明范围内。
根据变型1,一种mu估计方法可以包括经由多个传感器收集道路表面上的车辆行驶数据;对车辆行驶数据执行特征提取处理,以将车辆行驶数据变换成经处理的车辆行驶数据;将经处理的车辆行驶数据传送到机器学习模型;以及经由机器学习模型生成道路表面的所估计mu值或道路表面分类中的至少一个。
变型2可以包括如变型1所述的方法,其中经由多个传感器收集车辆行驶数据是近似持续的。
变型3可以包括如变型1至2中任一个所述的方法,进一步包括在对车辆行驶数据执行特征提取处理之前通过网络收集外部源数据。
变型4可以包括如变型1至3中任一个所述的方法,其中在对车辆行驶数据执行特征提取处理之前通过网络收集外部源数据是近似持续的。
变型5可以包括如变型1至4中任一个所述的方法,其中对车辆行驶数据执行特征提取处理以将车辆行驶数据变换成经处理的车辆行驶数据进一步包括对外部源数据执行特征提取处理以将外部源数据变换成经处理的外部源数据。
变型6可以包括如变型1至5中任一个所述的方法,其中将经处理的车辆行驶数据传送到机器学习模型进一步包括将经处理的外部数据传送到机器学习模型。
变型7可以包括如变型1至6中任一个所述的方法,其中外部源数据包括GPS车辆位置、天气数据、道路表面数据或V2X数据中的至少一个。
变型8可以包括如变型1至7中任一个所述的方法,其中所述多个传感器包括加速度计、被构造和布置用于声学压力感测的麦克风、接触传感器系统或轮胎压力监视系统中的至少一个。
变型9可以包括如变型1至8中任一个所述的方法,进一步包括将所估计mu值记录为随时间的历史数据,并将所述历史数据传送到机器学习模型,以进一步促进道路表面的估计mu值的准确生成。
变型10可以包括如变型1至9中任一个所述的方法,其中车辆行驶数据包括轮速、温度、振动或压力数据、车辆速度、加速度、偏航或俯仰数据、制动数据、手轮角度、位置或扭矩数据、小齿轮扭矩或角度数据、齿条力或成像数据中的至少一个。
根据变型11,一种mu估计方法可以包括以下步骤:经由包括加速度计或麦克风中的至少一个的多个传感器近似持续地收集道路表面上的车辆行驶数据;通过网络近似持续地收集外部源数据;聚集车辆行驶数据和外部源数据以形成聚集数据集;对聚集数据集执行特征提取处理,以变换聚集数据集并且成为经处理的聚集数据集;将经处理的聚集数据集传送到机器学习模型;以及经由机器学习模型生成道路表面的所估计mu值或道路表面分类中的至少一个。
变型12可以包括如变型11中所述的mu估计方法,其中车辆行驶数据包括轮速、温度、振动或压力数据、车辆速度、加速度、偏航或俯仰数据、制动数据、手轮角度、位置或扭矩数据、小齿轮扭矩或角度数据、齿条力或成像数据中的至少一个。
变型13可以包括如变型11至12中任一个所述的mu估计方法,其中外部源数据包括GPS车辆位置、天气数据、道路表面数据或V2X数据中的至少一个。
变型14可以包括如变型11至13中任一个所述的mu估计方法,其中所述多个传感器包括加速度计、被构造和布置用于声学压力感测的麦克风、接触传感器系统或轮胎压力监视系统中的至少一个。
变型15可以包括如变型11至14中任一个所述的mu估计方法,进一步包括将所估计mu值记录为随时间的历史数据,并将所述历史数据传送到机器学习模型,以进一步促进道路表面的估计mu值的准确生成。
根据变型16,一种用于基于振动的mu估计的产品可以包括:与网络可操作连接的至少一个计算设备;存储计算机可执行组件的存储器;执行存储在存储器中的计算机可执行组件的处理器。计算机可执行组件可以包括经由多个传感器近似持续地收集道路表面上的车辆行驶数据;通过网络近似持续地收集外部源数据;对车辆行驶数据和外部源数据执行特征提取处理,以将车辆行驶数据和外部源数据变换成经处理的车辆行驶数据和经处理的外部源数据;将经处理的车辆行驶数据和经处理的外部源数据传送到机器学习模型;以及经由机器学习模型生成道路表面的所估计mu值或道路表面分类中的至少一个。
变型17可以包括如变型16中所述的用于基于振动的mu估计的产品,进一步包括基于车辆底盘性能的评估来限定所估计mu值。
变型18可以包括如变型16至17中任一个所述的用于基于振动的mu估计的产品,进一步包括将所估计mu值记录为随时间的历史数据,并将所述历史数据传送到机器学习模型,以进一步促进道路表面的估计mu值的准确生成。
变型19可以包括如变型16至18中任一个所述的用于基于振动的mu估计的产品,进一步包括通过网络将历史数据传送到至少一个其他计算设备。
变型20可以包括如变型16至19中任一个所述的用于基于振动的mu估计的产品,其中所述至少一个其他计算设备与车辆可操作地通信。
对本发明范围内的选择变型的上述描述本质上仅仅是说明性的,并且因此,其变型或变体不应被视为脱离本发明的精神和范围。