便携式数控轨道钻及其控制方法
文献发布时间:2024-01-17 01:13:28
技术领域
本发明属于钻孔工具技术领域,涉及一种轨道钻孔工具,尤其涉及一种便携式数控轨道钻及其控制方法。
背景技术
轨道钻是一种在铁轨上钻孔的工具。现有轨道钻存在如下缺陷:
(1)一次只能打一个孔;轨道钻每固定一次只打一个孔,换位置重需重新固定打下一个孔。
(2)单边卡放,中心不稳,易打偏;动力装置和钻孔装置偏置一边,重心不在钢轨上,不易保持平衡。
(3)不同规格铁路需更换不同固定块,操作繁琐配件多;钢轨通常使用50轨和60轨,不同规格钢轨需配不同固定块保证固定效果。
(4)不可轨道推行,需搬运;钢轨是一定间距打一个或多个孔,轨道钻无行动装置,需要工具搬运。
有鉴于此,如今迫切需要设计一种新的轨道钻工工具,以便克服现有轨道钻工工具存在的上述至少部分缺陷。
发明内容
本发明提供一种便携式数控轨道钻及其控制方法,可降低工作强度,节省人力物力,提高钻孔的精确度及工作效率。
为解决上述技术问题,根据本发明的一个方面,采用如下技术方案:
一种便携式数控轨道钻,所述便携式数控轨道钻包括机身、钻孔装置及定位辅助机构,所述钻孔装置及定位辅助机构设置于所述机身;
所述机身设有推杆、夹紧机构、滑动机构;所述推杆的一端设置于所述机身,夹紧机构设置于所述机身底部,能夹紧轨道;所述钻孔装置设置于所述滑动机构,能沿设定轨迹滑动;
所述钻孔装置包括钻头组件、驱动机构、传动机构,所述驱动机构的输出轴连接所述传动机构,所述传动机构连接所述钻头组件,所述钻头组件能在所述驱动机构的驱动下旋转;
所述定位辅助机构设置于所述钻孔装置的一侧,用以辅助所述钻孔装置定位钻孔位置。
作为本发明的一种实施方式,所述定位辅助机构设置于所述钻孔装置的一侧,用以发出光线,发出的光线中心与所述钻头组件的钻孔中心对应。
作为本发明的一种实施方式,所述定位辅助机构包括红外光发射器。
作为本发明的一种实施方式,所述定位辅助机构包括摄像机构、图像处理模块、比对数据库、图像比对模块、移动参数确定模块;
所述摄像机构用以获取设定位置的图像;
所述图像处理模块用以对所述摄像机构获取的图像进行处理;
所述比对数据库用以存储待比对图像及各图像对应的移动参数;
所述图像比对模块用以将经过所述图像处理模块处理的图像与所述比对数据库中的图像进行比对,获取达到设定标准的图像;
所述孔位确定模块用以根据所述图像比对模块的比对结果确定移动参数,所述移动参数包括需要移动的距离及移动的方向。
作为本发明的一种实施方式,所述图像处理模块用以获取所述摄像机构拍摄的图像中心位置距离图像中第一孔位的像素数;所述比对数据库存储的数据中包含图像中心位置距离图像中第一孔位的像素数及相应的移动距离数据。
作为本发明的一种实施方式,所述定位辅助机构包括:摄像机构、数学模型建立模块、移动距离生成模块;
所述摄像机构用以获取设定位置的图像;
所述数学模型建立模块用以根据摄像机构拍摄的历史数据及对应的移动距离做自主学习,从而建立相应的数学模型;
所述移动距离生成模块将所述摄像机构拍摄的图像输入至所述数学模型建立模块建立的数学模型,得到需要移动的距离数据。
作为本发明的一种实施方式,所述机身设有刹车机构。
作为本发明的一种实施方式,所述机身连接有推杆,所述机身设有推杆固定座,所述推杆通过所述推杆固定座设置。
作为本发明的一种实施方式,所述驱动机构包括内燃机动力系统。
作为本发明的一种实施方式,所述便携式数控轨道钻进一步包括钻头精准移动驱动机构,所述钻头精准移动驱动机构连接所述钻头组件,能驱动所述钻头组件移动设定距离。
作为本发明的一种实施方式,所述钻头组件包括钻头,所述钻头内设有冷却介质流道,所述冷却介质流道的一端设置于所述钻头的头部;所述便携式数控轨道钻包括钻头冷却系统;
所述钻头冷却系统包括冷却管路、冷却介质容器、冷却介质驱动机构、冷却介质驱动控制电路;
所述冷却介质容器通过冷却管路连接冷却介质流道,冷却介质驱动控制电路连接冷却介质驱动机构,控制冷却介质驱动机构将冷却介质容器中的冷却介质通过冷却管路输送至钻头的冷却介质流道。
根据本发明的另一个方面,采用如下技术方案:一种上述便携式数控轨道钻的控制方法,所述控制方法包括如下步骤:
控制系统控制钻孔装置在第一铁轨的第一位置打孔,形成第一孔位;
通过钻头精准移动驱动机构驱动钻孔装置移动设定距离,在第一铁轨上距离第一位置设定距离处进行打孔;按照这种方式打孔,使得第一铁轨的设定区域完成的打孔数达到预设数量;
将便携式数控轨道钻移动至与所述第一铁轨相对的第二铁轨,靠近第二铁轨上、与所述第一铁轨的第一孔位相对的位置附近;
通过摄像机构获取第一铁轨各孔位的图像;
对所述摄像机构获取的图像进行设定处理;
将经过处理的图像与比对数据库中的图像进行比对,获取达到设定标准的图像;所述比对数据库存储待比对图像及各图像对应的移动参数;
根据比对结果确定移动参数,所述移动参数包括需要移动的距离及移动的方向;
通过移动驱动机构驱动所述钻孔装置移动所述移动参数对应的移动距离;再次通过摄像机构获取第一铁轨各孔位的图像,并进行处理、比对,获取对应的移动参数,直至移动参数对应的移动距离为0,表示钻孔装置处于正确的位置;
控制系统控制钻孔装置打孔,形成第二孔位;
通过钻头精准移动驱动机构驱动钻孔装置移动设定距离,在第二铁轨上距离第二孔位设定距离处进行打孔;按照这种方式打孔,使得第二铁轨的设定区域完成的打孔数达到预设数量,完成对该处的打孔工作。
本发明的有益效果在于:本发明提出的便携式数控轨道钻及其控制方法,可降低工作强度,节省人力物力,提高钻孔的精确度及工作效率。
附图说明
图1为本发明一实施例中便携式数控轨道钻的组成示意图。
图2为本发明一实施例中便携式数控轨道钻的结构示意图。
图3为本发明一实施例中便携式数控轨道钻的结构示意图。
图4为本发明一实施例中定位辅助机构的组成示意图。
图5为本发明一实施例中定位辅助机构的组成示意图。
具体实施方式
下面结合附图详细说明本发明的优选实施例。
为了进一步理解本发明,下面结合实施例对本发明优选实施方案进行描述,但是应当理解,这些描述只是为进一步说明本发明的特征和优点,而不是对本发明权利要求的限制。
该部分的描述只针对几个典型的实施例,本发明并不仅局限于实施例描述的范围。相同或相近的现有技术手段与实施例中的一些技术特征进行相互替换也在本发明描述和保护的范围内。
说明书中的“连接”既包含直接连接,也包含间接连接。
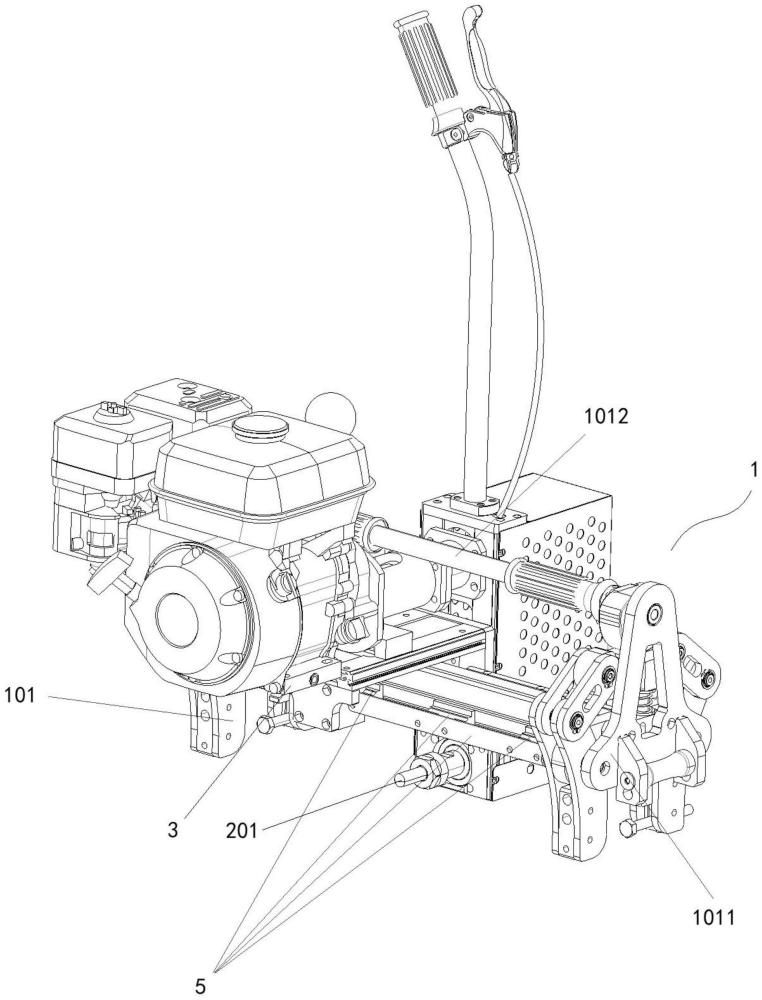
本发明揭示了一种便携式数控轨道钻,图1为本发明一实施例中便携式数控轨道钻的组成示意图,图2、图3为本发明一实施例中便携式数控轨道钻的结构示意图;请参阅图1至图3,所述便携式数控轨道钻包括机身1、钻孔装置2及定位辅助机构3,所述钻孔装置2及定位辅助机构3设置于所述机身1。在一实施例中,所述便携式数控轨道钻还包括控制系统4,所述控制系统4分别连接机身1、钻孔装置2及定位辅助机构3。
此外,所述便携式数控轨道钻还可以包括钻头精准移动驱动机构5,所述钻头精准移动驱动机构5连接所述钻头组件201,能驱动所述钻头组件201移动设定距离。
所述机身1设有夹紧机构101、滑动机构102;夹紧机构101设置于所述机身底部,能夹紧轨道;所述钻孔装置2设置于所述滑动机构102,能沿设定轨迹滑动。在一实施例中,夹紧机构101包括两组夹轨机构1011及夹紧轴1012,夹紧轴1012的两端分别连接一组夹轨机构1011;每组夹轨机构1011包括两个夹紧爪,两个夹紧爪通过所述夹紧轴1012实现夹紧及松开的控制。
所述钻孔装置2包括钻头组件201、驱动机构202、传动机构,所述驱动机构202的输出轴连接所述传动机构,所述传动机构连接所述钻头组件201,所述钻头组件能在所述驱动机构202的驱动下旋转。
所述驱动机构202可以包括内燃机动力系统;当然,也可以采用电机,电机连接一电池。所述内燃机动力系统可以提供整个便携式数控轨道钻的电力供应,也可以通过锂电池等供电模块为便携式数控轨道钻提供所需的供电。
所述钻头组件201可包括钻头,所述钻头内设有冷却介质流道,所述冷却介质流道的一端设置于所述钻头的头部;所述便携式数控轨道钻包括钻头冷却系统。所述钻头冷却系统包括冷却管路、冷却介质容器、冷却介质驱动机构、冷却介质驱动控制电路。所述冷却介质容器通过冷却管路连接冷却介质流道,冷却介质驱动控制电路连接冷却介质驱动机构,控制冷却介质驱动机构将冷却介质容器中的冷却介质通过冷却管路输送至钻头的冷却介质流道。所述冷却介质容器可设置于一平台上;该平台设置滑轮,可与所述便携式数控轨道钻的主体部分连接,能跟随便携式数控轨道钻的主体部分前进。
所述定位辅助机构3设置于所述钻孔装置2的一侧,用以辅助所述钻孔装置2定位钻孔位置。在本发明的一实施例中,所述定位辅助机构3用以发出光线,发出的光线中心与所述钻头组件2的钻孔中心对应。在一实施例中,所述定位辅助机构3包括红外光发射器。
所述机身1还可以设有刹车机构103;刹车机构103可以采用手动刹车装置,也可以采用电子控制的刹车装置。此外,所述机身1还可以连接有推杆,所述机身设有推杆固定座,所述推杆通过所述推杆固定座设置。设置推杆,工作人员可以通过推杆推动便携式数控轨道钻。
图4为本发明一实施例中定位辅助机构的组成示意图;请参阅图4,在本发明的一实施例中,所述定位辅助机构3(或者可以称其为定位辅助模块)包括摄像机构301、图像处理模块302、比对数据库303、图像比对模块304、移动参数确定模块305。
所述摄像机构301用以获取设定位置的图像;所述图像处理模块302用以对所述摄像机构获取的图像进行处理;所述比对数据库303用以存储待比对图像及各图像对应的移动参数。
所述图像比对模块304用以将经过所述图像处理模块处理的图像与所述比对数据库中的图像进行比对,获取达到设定标准的图像。
所述孔位确定模块305用以根据所述图像比对模块的比对结果确定移动参数,所述移动参数包括需要移动的距离及移动的方向。
在一实施例中,所述图像处理模块304用以获取所述摄像机构拍摄的图像中心位置距离图像中第一孔位的像素数(也可以是对应距离占整个图像对应方向线条长度的比例);所述比对数据库303存储的数据中包含图像中心位置距离图像中第一孔位的像素数及相应的移动距离数据。
图5为本发明一实施例中定位辅助机构的组成示意图;请参阅图5,在本发明的一实施例中,所述定位辅助机构3包括:摄像机构301、数学模型建立模块306、移动距离生成模块307。所述摄像机构301用以获取设定位置的图像;所述数学模型建立模块306用以根据摄像机构301拍摄的历史数据及对应的移动距离做自主学习,从而建立相应的数学模型。所述移动距离生成模块307将所述摄像机构301拍摄的图像输入至所述数学模型建立模块建立的数学模型,得到需要移动的距离数据。
本发明进一步揭示一种上述便携式数控轨道钻的控制方法,所述控制方法包括如下步骤:
【步骤S1】控制系统控制钻孔装置在第一铁轨的第一位置打孔,形成第一孔位;
【步骤S2】通过钻头精准移动驱动机构驱动钻孔装置移动设定距离,在第一铁轨上距离第一位置设定距离处进行打孔;按照这种方式打孔,使得第一铁轨的设定区域完成的打孔数达到预设数量;
【步骤S3】将便携式数控轨道钻移动至与所述第一铁轨相对的第二铁轨,靠近第二铁轨上、与所述第一铁轨的第一孔位相对的位置附近;
【步骤S4】通过摄像机构获取第一铁轨各孔位的图像;
【步骤S5】对所述摄像机构获取的图像进行设定处理;
【步骤S6】将经过处理的图像与比对数据库中的图像进行比对,获取达到设定标准的图像;所述比对数据库存储待比对图像及各图像对应的移动参数;
【步骤S7】根据比对结果确定移动参数,所述移动参数包括需要移动的距离及移动的方向;
【步骤S8】通过移动驱动机构驱动所述钻孔装置移动所述移动参数对应的移动距离;再次通过摄像机构获取第一铁轨各孔位的图像,并进行处理、比对,获取对应的移动参数,直至移动参数对应的移动距离为0,表示钻孔装置处于正确的位置;
【步骤S9】控制系统控制钻孔装置打孔,形成第二孔位;
【步骤S10】通过钻头精准移动驱动机构驱动钻孔装置移动设定距离,在第二铁轨上距离第二孔位设定距离处进行打孔;按照这种方式打孔,使得第二铁轨的设定区域完成的打孔数达到预设数量,完成对该处的打孔工作。
综上所述,本发明提出的便携式数控轨道钻及其控制方法,可降低工作强度,节省人力物力,提高钻孔的精确度及工作效率。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
这里本发明的描述和应用是说明性的,并非想将本发明的范围限制在上述实施例中。实施例中所涉及的效果或优点可因多种因素干扰而可能不能在实施例中体现,对于效果或优点的描述不用于对实施例进行限制。这里所披露的实施例的变形和改变是可能的,对于那些本领域的普通技术人员来说实施例的替换和等效的各种部件是公知的。本领域技术人员应该清楚的是,在不脱离本发明的精神或本质特征的情况下,本发明可以以其它形式、结构、布置、比例,以及用其它组件、材料和部件来实现。在不脱离本发明范围和精神的情况下,可以对这里所披露的实施例进行其它变形和改变。