一种基于子母系统的喷药系统及控制方法
文献发布时间:2024-01-17 01:15:20
技术领域
本发明涉及现代农业机械领域,具体涉及一种基于子母系统的喷药系统及控制方法。
背景技术
当前,现代农业玻璃温室常见的喷药方式是由工作人员拉一根很长的喷药管对每行农作物进行喷洒。人工喷药的方式,一方面要付出大量的人力,另一方面由于喷洒不均造成了农药的浪费问题。随着科技的发展,利用自动喷雾车进行作物喷雾出现。目前自动喷雾车仍然存在明显的弊端:(1)没有解决喷洒完当前行植保区域后,需要人工介入,才能进行下一行区域的作业,仍须耗费一定的人力;(2)自动喷雾车只能在轨道上行驶,无法在正常的地面上行驶,人工推起来非常吃力。
发明内容
针对现有技术的不足,本发明提供了一种基于子母系统的喷药系统及控制方法,以解决上述背景技术中提出的问题。
为实现上述目的,本发明采用以下技术方案:
一种基于子母系统的喷药系统,包括由进行每行作物喷洒的子机和用于横向移动子机换行的母机组成的子母系统,所述子机和母机无线通讯连接;
所述母机中设置有RFID地标采集模块、机器人寻找路径模块、机器人控制模块、机器人驱动转向模块、机器人驱动行走模块、机器人子机上车检测模块、机器人障碍检测模块,所有RFID地标采集模块、机器人寻找路径模块、机器人驱动转向模块、机器人驱动行走模块、机器人子机上车检测模块、机器人障碍检测模块均与机器人控制模块相连接;
所述子机中设置有喷药模块、防撞检测模块、距离测量模块、控制模块、双电机电子差速行走轮驱动模块,所述喷药模块、防撞检测模块、距离测量模块、双电机电子差速行走轮驱动模块均与控制模块相连接;
优选的,所述距离测量模块的悬浮计步器的编码器计算当前自动喷雾车的纵向绝对位置S的公式如下:
S=ENCO/L*PA*2R
其中ENCO为编码器传感器的测量值,L为增量编码器线数,PA为常数3.1415926,R为计步器的半径;
所述子机的距离测量模块采集每行的实时距离,与设定的农作无喷洒位置进行比较,自动实现每行农作物的喷洒;喷洒完成后自动返回,距离测量模块实时测量绝对距离,并返回绝对位置信息至母机,控制子机正确返航,并与返回至母机进行横向运输。
优选的,所述防撞模块内设置有接近传感器,用于检测自动喷药车前进方向和后退的障碍物。
优选的,所述喷药模块内包括有比例调节阀、喷药桶、压力检测传感器、自动喷头、泵站、流量传感器,所述水泵站与比例调节阀连接,所述比例调节阀与自动喷头连接,药液从喷药桶经管道流入比例调节阀的阀门,然后从自动喷头喷洒出;其中压力传感器将喷头的压力数据传至控制模块,子机经过控制模块的数据处理,控制比例调节阀达到所需要的最佳喷药压力,其中流量传感器将流量数据传至喷药车控制模块,控制模块对数据进行处理分析得出最优流量数据,输出至泵站进行泵站转速控制。
优选的,所述双电机电子差速行走驱动轮模块设置有速度检测编码器,电流检测传感器,驱动轮模块安装有轨道行驶驱动轮,地面行驶驱动轮,当自动喷药车行驶于普通地面时候,速度检测编码器将速度信号传至自动喷药车的控制模块,电流传感器将双电机的电流信号传至自动喷雾车的控制模块,自动喷雾车的控制模块将采集到的数据进行差速运算,将运算结果输出至行驶电机驱动轮模块;当自动喷雾车运行在轨道上,自动喷雾车在轨道检测系统启动,反馈信号至自动喷雾车控制模块,自动喷雾车控制驱动轮模块双电机同步速度行驶。
优选的,所述RFID地标采集模块包括RFID地标读卡器,RFID地标读卡器通过串行总线的方式连接到母机机器人控制模块连接。
优选的,所述机器人寻找路径模块包括磁导传感器,地面磁轨道系统,磁导航传感器将实时位置数据通过模拟数据的方式传送到母机控制模块,母机通过实时位置计算出车头转向角度,实现母机自动导航,再配合RFID地标模块采集地标数据,就可以准确无误的将自动喷雾车运输到下一行喷药的起始位置。
优选的,所述机器人子机上车检测模块包括母机发射传感器和子机上安装的传感器反射模块,子机返回母机后,母机发射传感器发射红外信号经子机反射模块反射回母机发射传感器,机器人子机上车检测模块将子机返回到位信号发送至母机机器人控制模块。
优选的,所述机器人障碍检测模块包括激光障碍检测传感器,防撞杆,其中激光检测传感器实时检测障碍无距离,当障碍物距离小于0.5米时候,母机停机并报警。
一种基于子母系统的喷药系统的控制方法,通过以下步骤来实现:
一、母机通过RFID地标采集模块,机器人寻找路径模块自动寻找喷洒起点,并在找到喷洒点起点坐标后发送信号给子机,子机开始进行农药喷洒工作。
二、子机开启双电机电子差速行走轮驱动模块,子机向轨道方向行驶,距离测量模块检测到子机上了轨道后开始测量子机的实时位置,子机运行至设定位置减速,并在设定时间内停止,开启喷药模块,打开自动喷头,打开比例调节阀,开启泵站电机,药液经喷药桶流向比例调节阀门,经比例调节阀门流向自动喷头,从自动喷头精准喷洒农作物;喷药模块中的压力传感器和流量传感器实时检测压力和流量的变化,通过压力传感器和流量传感器数据的变化,子机控制模块实时控制泵站的电机转速和比例调节阀的开合,使自动喷头喷出非常稳定的压力和固定的流量到植物的表面。为确保喷药的过程中尽量减少农药喷洒到子机上面,喷药都是在返回母机的过程中进行。
三、子机喷洒完药液返回母机,母机中的子机机器人检测模块检测子机是否已经运行到子机在母机上的停机位置,将检测信号传送至母机,母机收到检测到子机已到达停机位置后开始下一步操作。
四、母机启动RFID地标采集模块,机器人寻找路径模块,将实时位置和地标信息传送到母机机器人控制模块,母机机器人控制模块启动机器人驱动转向模块和机器人驱动行走模块,自动将子机运送至下一行喷洒点位置,这样循环往复直至将设定行喷洒完成。
本发明相对于现有技术,具有以下有益效果:
本发明通过子机自动测量喷洒区轨道的距离,最大程度实现精准喷洒,在确保每一颗植株都能喷洒到的情况下减少药剂电量的损耗,通过和母机通讯,实时更新当前喷洒位置,母机等待自动喷药车喷洒完当前作业区后,母机将子机自动横向移动至下一行,实现自动换行,大大提高了喷洒效率。
附图说明
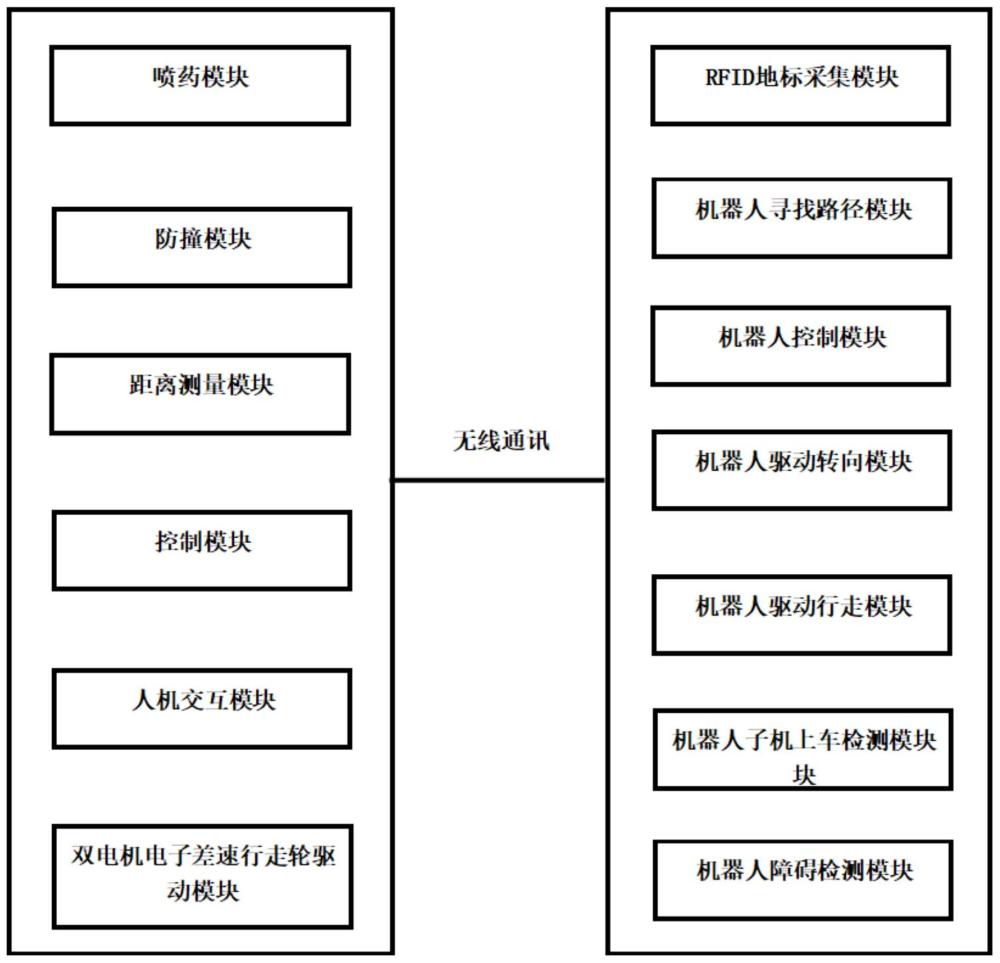
图1为本发明字母系统结构图;
图2为本发明子母系统喷药流程图;
具体实施方式
为更进一步阐述本发明为实现预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明的具体实施方式、结构、特征及其功效,详细说明如后。
如图1-2所示的一种基于子母系统的喷药系统,包括由进行每行作物喷洒的子机和用于横向移动子机换行的承载式运输车组成的子母系统,其中子机为自动喷雾车,母机为横向移动运输车,子机和母机无线通讯连接;
所述母机中设置有RFID地标采集模块、机器人寻找路径模块、机器人控制模块、机器人驱动转向模块、机器人驱动行走模块、机器人子机上车检测模块、机器人障碍检测模块,所述RFID地标采集模块、机器人寻找路径模块、机器人驱动转向模块、机器人驱动行走模块、机器人子机上车检测模块、机器人障碍检测模块均与机器人控制模块相连接;
所述子机中设置有喷药模块、防撞模块、控制模块、距离测量模块、人机交互模块、双电机电子差速行走轮驱动模块,所述喷药模块、防撞模块、距离测量模块、人机交互模块、双电机电子差速行走轮驱动模块均与喷雾车控制模块相连接;
其中通过子机上的距离测量模块的悬浮计步器的编码器计算当前子机的纵向绝对位置S的公式如下:
S=ENCO/L*PA*2R
其中ENCO为编码器传感器的测量值,L为增量编码器线数,PA为常数3.1415926,R为计步器的半径。
所述子机距离测量模块采集每行的实时距离,与设定的农作无喷洒位置进行比较,自动实现每行农作物的喷洒;喷洒完成后自动返回,距离测量模块实时测量绝对距离,并返回绝对位置信息至母机,控制子机正确返航,并与返回至母机进行横向运输。
子机的防撞模块内设置有接近传感器,用于检测自动喷药车前进方向和后退的障碍物。
子机的喷药模块内包括有比例调节阀、喷药桶、压力检测传感器、自动喷头、泵站、流量传感器,泵站与比例调节阀相连接,比例调节阀与自动喷头连接,药液从喷药桶经管道流入比例调节阀,然后从自动喷头喷洒出;其中压力传感器将喷头的压力数据传至子机控制模块,子机经过控制模块的数据处理,控制比例调节阀达到所需要的最佳喷药压力,其中流量传感器将流量数据传至子机控制模块,子机控制模块对数据进行处理分析得出最优流量数据,输出至泵站进行泵站转速控制。
子机的双电机电子差速行走驱动轮模块设置有速度检测编码器,电流检测传感器,驱动轮模块安装有轨道行驶驱动轮,地面行驶驱动轮,当自动喷药车行驶于普通地面时候,速度检测编码器将速度信号传至子机的控制模块,电流传感器将双电机的电流信号传至子机的控制模块,子机的控制模块将采集到的数据进行差速运算,将运算结果输出至行驶电机驱动轮模块;当子机运行在轨道上,子机在轨道检测系统启动,反馈信号至子机控制模块,子机控制驱动轮模块双电机同步速度行驶。
母机的RFID地标采集模块包括RFID地标读卡器,地标读卡器通过串行总线的方式连接到母机机器人控制模块连接。
母机的机器人寻找路径模块包括磁导传感器,地面磁轨道系统,磁导航传感器将实时位置数据通过模拟数据的方式传送到母机控制模块,母机通过实时位置计算出车头转向角度,实现母机自动导航,再配合RFID地标模块采集地标数据,就可以准确无误的将子机运输到下一行喷药的起始位置。
母机的机器人驱动转向模块和机器人驱动行走模块,包括双电机驱动器、转向电机、行走电机,转向电机用于驱动母机的方向盘,行走电机用于驱动母机前进行驶和后退行驶。
母机的机器人子机上车检测模块包括母机发射传感器和子机上安装的传感器反射模块,子机返回母机后,母机发射传感器发射红外信号经子机反射模块反射回母机发射传感器,子机检测模块将子机返回到位信号发送至母机机器人控制模块。
母机的机器人障碍检测模块包括激光障碍检测传感器,防撞杆,其中激光检测传感器实时检测障碍无距离,当障碍物距离小于0.5米时候,母机停机并报警。
一种基于子母系统的喷药系统的控制方法,通过以下步骤来实现:
一、母机通过RFID地标采集模块,机器人寻找路径模块自动寻找喷洒起点,并在找到喷洒点起点坐标后发送信号给子机,子机开始进行农药喷洒工作。
二、子机开启双电机电子差速行走轮驱动模块,子机向轨道方向行驶,距离测量模块检测到子机上了轨道后开始测量子机的实时位置,子机运行至设定位置减速,并在设定时间内停止,开启喷药模块,打开自动喷头,打开比例调节阀,开启泵站电机,药液经喷药桶流向比例调节阀门,经比例调节阀门流向自动喷头,从自动喷头精准喷洒农作物;喷药模块中的压力传感器和流量传感器实时检测压力和流量的变化,通过压力传感器和流量传感器数据的变化,子机控制模块实时控制泵站的电机转速和比例调节阀的开合,使自动喷头喷出非常稳定的压力和固定的流量到植物的表面。为确保喷药的过程中尽量减少农药喷洒到子机上面,喷药都是在返回母机的过程中进行。
三、子机喷洒完药液返回母机,母机中的子机机器人检测模块检测子机是否已经运行到子机在母机上的停机位置,将检测信号传送至母机,母机收到检测到子机已到达停机位置后开始下一步操作。
四、母机启动RFID地标采集模块,机器人寻找路径模块,将实时位置和地标信息传送到母机机器人控制模块,母机机器人控制模块启动机器人驱动转向模块和机器人驱动行走模块,自动将子机运送至下一行喷洒点位置,这样循环往复直至将设定行喷洒完成。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭示如上,然而并非用以限定本发明,任何本领域技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简介修改、等同变化与修饰,均仍属于本发明技术方案的范围内。