基于非线性字典的回归误差抗干扰导航控制系统
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及交通信息处理、辅助驾驶技术等领域,特别设计基于非线性字典的回归误差抗干扰导航控制系统。
背景技术
从20世纪70年代开始,美国、英国、德国等发达国家开始进行无人驾驶汽车的研究,在可行性和实用化方面都取得了突破性的进展。中国从20世纪80年代开始进行无人驾驶汽车的研究,国防科技大学在1992年成功研制出中国第一辆真正意义上的无人驾驶汽车。
由于无人车技术存在许多的不确定性,因此,无人车技术目前还处于测试阶段。但是随着我国交通运输业发展很快,目前全国公路总里程达到450万公里;全国取得机动车驾驶资格人数超3.34亿人。交通运输业的发展也带动了对导航系统的需求,目前智能导航系统技术受到越来越多学者的关注,目前智能车导航系统在十字、丁字等交通路口走错车道时并不能获得导航系统的提前警示,于是最终不得不多走冤枉路或违反交通规则,违反交通规则的后果是轻则罚款、扣分,重则发生交通事故。
发明内容
为了解决上述存在问题。本发明提出一种基于非线性字典的回归误差抗干扰导航控制系统。为达此目的:
基于非线性字典的回归误差抗干扰导航控制系统,具体步骤如下:
所述车辆导航系统在对应的机动车辆内设置车辆导航系统,所述机动车辆在对应的车道路面上行驶,车辆摄像头对路面的特殊符号进行记录,信号设置区内的左转弯车道与直行车道之间的标示线和斑马线等标志,所述车辆导航系统包括车辆导航系统控制器、摄像头和信号处理器,所述车辆导航系统控制器通过连接线与摄像头和信号处理器相连,使用RE-DMDL对采集信息进行识别,利用RE-DMDL的非线性的降维与抗干扰识别能力,对图像关键信息进行分割识别,实现车辆导航系统的辅助控制;
所述RE-DMDL旨在逐层的字典学习中增强表示系数的判别性,通过回归误差最小化使得表示系数增强,多层字典学习表示为:
X=D
其中,D
所述导航控制系统信息识别的方法的多层字典学习第k层的目标函数计算公式为:
其中,D
所述多层字典学习的分类器参数计算公式为:
W
其中,Z
所述RE-DMDL涉及基础字典学习,对于单层字典学习过程涉及到稀疏分解,此过程对采集的信号进行去噪,增加系统的抗干扰能力,系数分解的计算公式为:
其中,D是字典,Z是稀疏系数,t是稀疏系数的非零值个数。
作为本发明进一步改进,所述信号处理器为WIFI信号处理器(3)、Zigbee信号处理器(4)和Bluetooth信号处理器(5),所述车辆导航系统能够接收和处理基于无线技术的无线交通信号。
本发明基于非线性字典的回归误差抗干扰导航控制系统,有益效果在于:
1.本发明利用RE-DMDL算法,增加了系统的鲁棒性和抗干扰能力。
2.本发明使用多层分类字典,增加了系统的识别准确率。
3.本发明算法复杂度低,实时性强。
4.本发明硬件系统实现简单,成本低。
附图说明
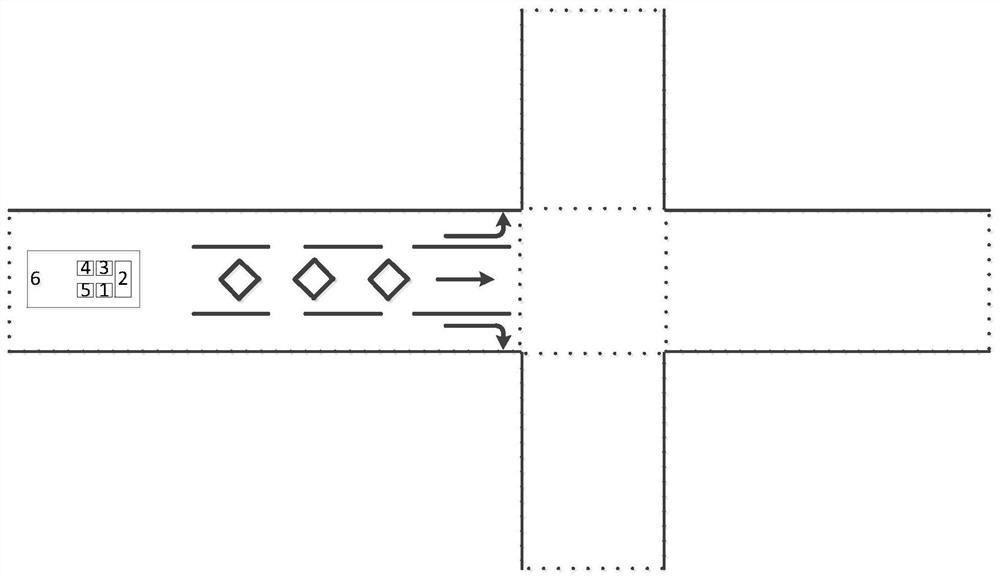
图1某十字路口路面车道示意图;
图2 RE-DMDL训练流程图;
具体实施方式
本发明提出一种基于非线性字典的回归误差抗干扰导航控制系统。
下面结合附图1和2与具体实施方式对本发明进一步描述:
作为本发明进一步改进,所述车辆导航系统在对应的机动车辆6内设置车辆导航系统,所述机动车辆6在对应的车道路面上行驶,车辆摄像头对路面的特殊符号进行记录,信号设置区内的左转弯车道与直行车道之间的标示线和斑马线等标志,所述车辆导航系统包括车辆导航系统控制器1、摄像头2和信号处理器,所述车辆导航系统控制器1通过连接线与摄像头2和信号处理器相连。使用RE-DMDL对采集信息进行识别,利用RE-DMDL的非线性的降维与抗干扰识别能力,对图像关键信息进行分割识别,实现车辆导航系统的辅助控制。
此外,信号处理器为WIFI信号处理器3、Zigbee信号处理器4和Bluetooth信号处理器5,所述车辆导航系统能够接收和处理基于无线技术的交通信号。
RE-DMDL旨在逐层的字典学习中增强表示系数的判别性,通过回归误差最小化使得表示系数增强,多层字典学习表示为:
X=D
其中,D
多层字典学习第k层的目标函数计算公式为:
其中,D
多层字典学习的分类器参数计算公式为:
W
其中,Z
RE-DMDL涉及基础字典学习,对于单层字典学习过程涉及到稀疏分解,此过程对采集的信号进行去噪,增加系统的抗干扰能力,系数分解的计算公式为:
Y≈DZ s.t.||Z||
其中,D是字典,Z是稀疏系数,t是稀疏系数的非零值个数。
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作任何其他形式的限制,而依据本发明的技术实质所作的任何修改或等同变化,仍属于本发明所要求保护的范围。
- 基于非线性字典的回归误差抗干扰导航控制系统
- 基于主成分自回归的非线性抗干扰方法