针对自主车辆的安全轨迹选择
文献发布时间:2023-06-19 09:26:02
技术领域
本发明涉及用以从一组轨迹中选择出要由自主或半自主地面车辆使用的一个轨迹、即所谓的选定轨迹的方法。
另外,本发明涉及一种用于选择一个轨迹的选定轨迹选择设备、以及一种选定轨迹生成设备。
最后,本发明涉及一种自主或半自主地面车辆,其包括用于选择一个轨迹的选定轨迹选择设备和/或选定轨迹生成设备。
本发明涉及自主或半自主地面车辆(按术语“车辆”缩写),诸如自主或半自主汽车。所述车辆与诸如公路、城市或郊区设置之类的公共基础设施中的其他自主或非自主车辆紧密靠近地进行操作。所述车辆实现轨迹生成器,该轨迹生成器生成轨迹,车辆会沿着该轨迹移动。然而,轨迹生成器可能变得有错误并且产生不安全轨迹。
不安全轨迹是在如下意义上不安全的轨迹:地面车辆如果要沿着所述有错误的轨迹移动,将会对所述车辆内的乘客或所述车辆外面的人造成伤害。例如,如果假设车辆内部的乘客或所述车辆的环境中的人将会由于撞击而变得受伤是合理的,则导致所述车辆与静止或移动对象撞击的轨迹就被认为是不安全轨迹。
不是不安全的轨迹被认为是安全轨迹。
本发明的目的是公开一种用于安全轨迹选择的方法和设备,该方法和设备从由两个或更多个轨迹生成器生成的一组轨迹中选择出可以由车辆使用的轨迹,即所谓的“选定轨迹”。
该目的通过如上所提及的方法来实现,其中,根据本发明,所述方法的特征在于以下步骤:
●利用一个、两个或多个验证模块来评估所述一组轨迹,并且针对轨迹中的每一个返回质量评估,以及
●利用排名(Ranking)方案对所述轨迹进行排名,其中,在对轨迹进行排名时考虑质量评估,以及
●基于轨迹的排名来精确选择一个轨迹,即“选定轨迹”。
根据该方法,最佳排名的轨迹可以是选定轨迹或被选择为选定轨迹。
在至少一个轨迹生成器产生安全轨迹的假设下,所述选定轨迹是安全轨迹,即使在轨迹生成器中的一个、两个或更多个产生了不安全轨迹的情形下亦是如此。
在两个或更多个轨迹生成器产生了安全轨迹的情况下,根据本发明,将最佳安全轨迹选为选定轨迹。
安全轨迹选择被配置成:应用轨迹排名方案来将最佳安全轨迹确定为选定轨迹。如本申请中所公开的,所述安全轨迹选择的特殊性显著改进了自主或半自主车辆沿着安全轨迹操纵的可能性,该安全轨迹是超过当前现有技术的最佳轨迹。
优选地,提供了两个或更多个轨迹生成器,这些轨迹生成器通常在车辆中实现。所有轨迹生成器被配置成产生安全轨迹。然而,由于故障(例如,设计故障、软件故障、随机硬件故障等),一个、两个或许多个轨迹生成器可能发生故障,并且由于这种故障而产生不安全轨迹。根据本发明的安全轨迹选择实现了验证模块以及决策机(Decision Maker),以便从由轨迹生成器生成的轨迹中选择选定轨迹,其中,选定轨迹是相对于所配置的排名方案的最佳轨迹,并且优选地是安全的。
如上所提及的,可以提供的是,该组轨迹是由两个或更多个轨迹生成器生成的,其中优选地,两个或更多个轨迹生成器中的每个轨迹生成器与其他轨迹生成器独立地生成该组轨迹中的一个或多个轨迹。
轨迹生成器中的一个、两个或更多个可能发生故障并且产生不安全轨迹。然而,使用两个或更优选地更多个轨迹生成器提高了至少一个轨迹生成器产生安全轨迹的可能性,使得相对于排名方案的最佳轨迹是安全轨迹。
可以提供的是,所有轨迹生成器是互异的,特别是在于:轨迹生成器中的每一个使用与其他轨迹生成器不同的算法以用于生成轨迹,和/或每个轨迹生成器在不同的硬件上实现。
在这种情况下,标识出特别地在具体情形下产生了“更好”轨迹的轨迹生成器和/或算法、以及产生了“不太好”或甚至不安全轨迹的轨迹生成器,并且使用关于这些轨迹生成器和/或算法的信息作为附加输入(还参见下文)以用于根据排名方案来对轨迹进行排名可以是可能的。
验证模块关于各种属性来分析由轨迹生成器生成的轨迹。验证模块的示例(所述模块可以执行的检查)是:分析与障碍物碰撞的可能性是否足够低;根据车辆动力学来分析轨迹是否可由车辆行驶;或者分析轨迹是否符合法律规范。
决策机将验证模块的结果当作是输入,并且优选地也将附加输入IN当作是输入。附加输入IN例如是以下各项中的任何一个或任意组合:车辆状态信息(速度和/或加速度和/或方向和/或轮胎摩擦和/或转向角)、地图数据、轨迹生成器诊断、关于轨迹生成器的汽车安全完整性等级(ASIL)的知识、关于车辆环境的知识。基于所述输入,决策机基于其输入并且使用排名方案来选择选定轨迹。
车辆使用如由安全轨迹选择所选择的选定轨迹来确定其未来移动。
优选地,该方法和车辆被配置成周期性地执行如上概述的过程(轨迹生成、轨迹选择、轨迹执行)。该过程执行的典型周期为从1 ms至100 ms,但是也可能远低于1 ms或远高于100 ms。
下面描述本发明的进一步优点,这些优点可以单独地实现,或者可以以任意组合的方式来实现:
●碰撞概率测试,CPT
●车辆动力学测试,VDT
●车辆稳定性测试,VST
●合法性和规范测试,LRT
●舒适性和便利性测试,CCT
●能量效率测试,EET
●用户定义的偏好测试,UPT。
优选地,不同的验证模块对轨迹执行不同的测试。
●相应轨迹的轨迹生成器的标识符,或
●从本地存储的信息导出的,或
●从其他输入导出的。
根据本发明的用于从一组轨迹中选择出一个轨迹、即所谓的“选定轨迹”(该选定轨迹要由自主或半自主地面车辆使用)的选定轨迹选择设备包括一个、两个或多个验证模块以及决策机,其中,安全轨迹选择设备被适配成执行如上所述的方法。
根据本发明的选定轨迹生成设备包括:
●两个或更多个轨迹生成器,其被适配成生成一组轨迹,以及
●上面提及的选定轨迹选择设备,以用于从轨迹生成器生成的一组轨迹中选择出一个轨迹,即选定轨迹。
优选地,轨迹生成器中的每一个被适配成独立于其他轨迹生成器而生成一组轨迹中的一个或多个轨迹。可以提供的是,所有轨迹生成器是互异的,特别是在于:轨迹生成器中的每一个使用与其他轨迹生成器不同的算法以用于生成轨迹,和/或每个轨迹生成器在与其他轨迹生成器不同的硬件上实现。
附图说明
在下文中,为了进一步论证本发明,如附图中所示,讨论了说明性和非限制性实施例,附图示出了:
图1是实现选定轨迹选择设备的车辆的示例,以及
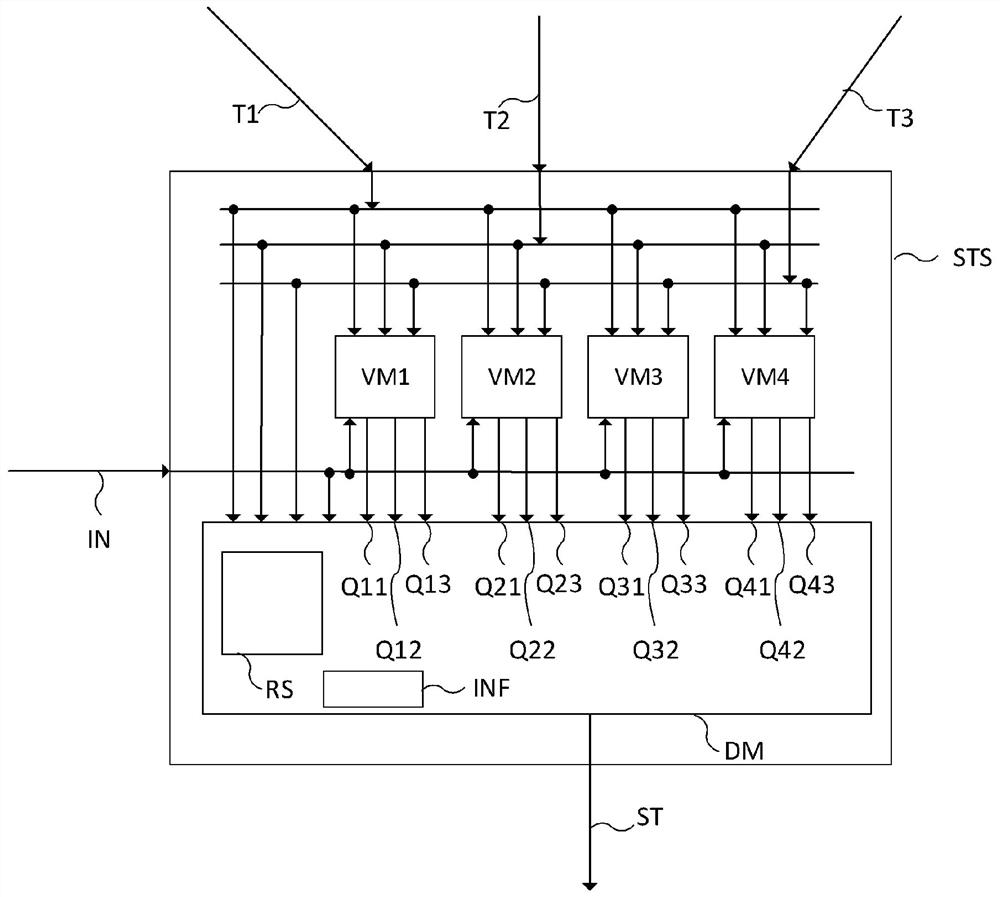
图2是选定轨迹选择设备的内部结构的示例。
接下来,我们讨论本发明的许多实现方式中的一些。如果没有另行陈述,结合具体示例描述的所有细节不仅结合该示例是有效的,而且适用于本发明的一般保护范围。
图1描绘了实现三个轨迹生成器TG和安全轨迹选择STS的自主或半自主地面车辆GV的示例,该三个轨迹生成器TG和安全轨迹选择STS可以是选定轨迹生成设备STG的一部分。轨迹生成器TG生成轨迹T1-T3。安全轨迹选择STS选择轨迹作为选定轨迹ST。该选定轨迹ST是安全的,并且是相对于排名方案RS的最佳轨迹。车辆GV使用选定轨迹ST来进行操纵,例如在公路上、在城市或郊区环境中进行操纵。
图2描绘了安全轨迹选择STS的内部结构的示例。安全轨迹选择STS从根据图1的轨迹生成器TG1-TG3接收例如轨迹T1-T3作为输入轨迹,并且优选地接收其他输入IN作为例如:
●车辆状态信息(速度和/或加速度和/或方向和/或轮胎摩擦和/或转向角等),和/或
●地图数据,和/或
●轨迹生成器诊断。
另外,安全轨迹选择STS也可以具有本地存储的信息INF,作为例如关于相应轨迹生成器TG1-TG3的汽车安全完整性等级(ASIL)的信息,和/或关于轨迹生成器TG1-TG3的操作历史的诊断数据、和/或可以被用于选择选定轨迹ST的其他信息。
安全轨迹选择STS进一步实现一个或多个验证模块,在该示例中为四个验证模块VM1-VM4。验证模块VM1-VM4被配置成实现对轨迹T1-T3的测试。对所述轨迹T1-T3的所述测试返回质量评估Q11-Q43,其中,所述质量评估Q11-Q43指示就所述测试而言的轨迹T1-T3中的每一个的质量。
优选地,每个验证模块实现对一个、两个或优选地所有轨迹的不同的测试。
例如,
●验证模块VM1实现对每个轨迹T1-T3执行的测试,并且在VM1中执行的所述测试针对每个轨迹返回质量评估:针对轨迹T1的质量评估Q11、针对轨迹T2的质量评估Q12和针对轨迹T3的质量评估Q13;
●验证模块VM2实现对每个轨迹T1-T3执行的测试,并且在VM2中执行的所述测试针对每个轨迹返回质量评估:针对轨迹T1的质量评估Q21、针对轨迹T2的质量评估Q22和针对轨迹T3的质量评估Q23;
●验证模块VM3实现对每个轨迹T1-T3执行的测试,并且在VM3中执行的所述测试针对每个轨迹返回质量评估:针对轨迹T1的质量评估Q31、针对轨迹T2的质量评估Q32和针对轨迹T3的质量评估Q33;
●验证模块VM4实现对每个轨迹T1-T3执行的测试,并且在VM4中执行的所述测试针对每个轨迹返回质量评估:针对轨迹T1的质量评估Q41、针对轨迹T2的质量评估Q42和针对轨迹T3的质量评估Q43。
安全轨迹选择STS从由轨迹生成器TG1-TG3生成的轨迹T1-T3中选择轨迹作为选定轨迹ST。一般而言,每个轨迹生成器独立于其他轨迹生成器而生成一个或多个轨迹。在特定示例中,轨迹生成器TG1生成轨迹T1,轨迹生成器TG2生成轨迹T2,并且轨迹生成器TG3生成轨迹T3。
该选择在决策机DM中执行。决策机DM使用如由验证模块VM1-VM4中的测试返回的质量评估、以及可选的其他输入IN(如上所述)、以及可选的本地存储的信息INF,以用于选择一个选定轨迹ST的目的。对于该选择过程,决策机DM对排名方案RS进行编码,根据该排名方案RS,决策机DM对轨迹T1-T3进行排名。因此,该排名方案RS从该组轨迹T1-T3中唯一地标识出最佳安全轨迹。
安全轨迹选择STS将所述最佳轨迹(如选定轨迹ST)作为输出而返回。在开始时提及的假设下,所述选定轨迹ST通常是安全轨迹或最佳安全轨迹。
验证模块VM1-VM4的示例测试如下:
●碰撞概率测试CPT:该测试评估车辆GV在沿着被测轨迹T1-T3进行操纵时会与障碍物碰撞的可能性。
●车辆动力学测试VDT:该测试评估车辆GV可以多么准确地沿被测轨迹T1-T3而行。
●车辆稳定性测试VST:该测试从控制理论的角度评估车辆GV在沿被测轨迹T1-T3而行时变得不稳定的可能性。
●合法性和规范测试LRT:该测试评估车辆GV在沿被测轨迹T1-T3而行时遵守所配置的法律规则(例如,最大速度、与其他车辆的最小距离、符合路标的表现)的可能性。
●舒适性和便利性测试CCT:该测试评估当车辆GV沿被测轨迹T1-T3而行时,所述车辆GV的移动对乘客似乎是多么舒适。
●能量效率测试EET:该测试评估沿着被测轨迹T1-T3移动的车辆GV的能量效率。
●用户定义的偏好测试UPT:该测试评估车辆GV是否遵守用户定义的约束(例如,用户设置的最大速度限制偏好、用户设置的最大加速度偏好、其他偏好)。
在下文中,我们给出了排名方案RS的一些示例实施例。验证模块VM1-VM4优选地具有不同的关键度。例如,实现碰撞概率测试CPT的验证模块比被配置成实现舒适性和便利性测试CCT的验证模块更加关键,这是因为由碰撞概率测试CPT对轨迹做出的低质量评估Q11-Q43意味着车辆GV与障碍物碰撞的高可能性,而由舒适性和便利性测试CCT对轨迹做出的低质量评估不会损害车辆乘客的安全。因此,在一个实施例中,排名方案RS在安全相关验证模块S-VM与非安全相关验证模块N-VM之间进行辨别。
在一个实施例中,针对车辆GV的完整任务的持续时间,验证模块VM1-VM4被静态地定义为安全相关验证模块S-VM和非安全相关验证模块N-VM。
在一个实施例中,验证模块VM1-VM4到安全相关验证模块S-VM和非安全相关验证模块N-VM中的分配可以在车辆GV的任务期间改变。可以提供的是,所述分配在车辆GV的任务期间改变,这取决于安全轨迹选择STS接收到的输入IN。基于所述输入IN,安全轨迹选择STS可以在行驶场景之间进行区分,例如,公路行驶对比停车对比城市或郊区行驶。因此,安全轨迹选择STS可以响应于改变的行驶场景而将验证模块VM1-VM4的分类改变成安全相关验证模块S-VM和非安全相关验证模块N-V。
可以提供的是,安全轨迹选择STS将质量评估Q11-Q43标准化为范围,例如,标准化为在最小值R
可以提供的是,安全轨迹选择STS将两个或更多个、优选地所有质量评估Q11-Q43标准化到相同的范围。
可以提供的是,安全轨迹选择STS被配置成:针对质量评估Q11-Q43,在最小权重W
可以提供的是,针对车辆GV的完整任务的持续时间,所配置的权重W
可以提供的是,所配置的权重W
排名方案RS定义了关于如何针对相应生成的轨迹T1-T3来计算轨迹排名TR1-TR3的排名过程。安全轨迹选择STS选择具有最佳轨迹排名TR1-TR3的轨迹T1-T3作为选定轨迹ST。在下文中,我们讨论了排名过程的一些示例。
在一个实施例中,排名过程RP如下面那样来实现:
●针对每个轨迹T1-T3,排名方案计算安全排名SR1-SR3。可以如下面那样计算安全排名SR1-SR3(其中
●针对每个轨迹T1-T3,排名方案计算非安全排名NR1-NR3。可以如下面那样计算非安全排名NR1-NR3(其中
●安全轨迹选择STS被配置成选择具有安全排名SR1-SR3的最高值的轨迹T1-T3作为选定轨迹ST。在当存在具有相等安全排名SR1-SR3的多于一个轨迹T1-T3的情况下,安全轨迹选择STS被配置成:从具有最高安全排名SR1-SR3的多于一个轨迹T1-T3中选择出具有最高非安全排名NR1-NR3的一个或多个轨迹T1-T3作为选定轨迹ST。多于一个轨迹T1-T3具有相等的最高安全排名SR1-SR3和相等的最高非安全排名NR1-NR3,则安全轨迹选择STS被配置成:根据决胜器TB从具有相等的最高安全排名SR1-SR3和相等的最高非安全排名NR1-NR3的所述轨迹T1-T3中选择出轨迹T1-T3。
该决胜器TB可以是例如:
●相应轨迹T1-T3的轨迹生成器TG1-TG3的标识符;
●从本地存储的信息INF导出的;
●从对安全轨迹选择的其他输入IN导出的。