基于双反馈控制器的车辆全速域横向控制方法
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及车辆控制技术领域,尤其涉及一种基于双反馈控制器的车辆全速域横向控制方法。
背景技术
现有的横向控制算法一般都是基于车辆运动学和动力学模型建立汽车横向控制模型,运用自动控制原理设计控制的方法和基于驾驶员模拟方法实现车辆的横向控制。动力学模型考虑了轮胎的侧偏刚度、载荷前后悬长度等信息;车辆在高速运行时这些车辆参数波动很大,并且路况也是千变万化的,所以很难用模型精确的控制,因此传统方案往往存在控制精度低的问题。
发明内容
针对以上问题,本发明提出一种基于双反馈控制器的车辆全速域横向控制方法。
为实现本发明的目的,提供一种基于双反馈控制器的车辆全速域横向控制方法,包括如下步骤:
S10,基于车辆的横向误差确定PD反馈控制器对应的第一转角分量;
S20,基于车辆的横向位置偏差确定PID反馈控制器对应的第二转角分量;
S30,根据车辆纵向车速和道路曲率半径标定前馈补偿弯道的车轮转角分量;
S40,对第一转角分量、第二转角分量和车轮转角分量进行求和,根据求和结果进行车辆全速域横向控制。
在一个实施例中,根据求和结果进行车辆全速域横向控制包括:
对求和结果进行平滑滤波处理,将平滑滤波处理的结果发送给车辆转向系统,使车辆转向系统依据平滑滤波处理进行车辆全速域横向控制。
在一个实施例中,基于车辆的横向误差确定PD反馈控制器对应的第一转角分量包括:
计算PD反馈控制器对应的第一预瞄距离、横向角误差、第一KP自适应系数和第一KD自适应系数,根据第一预瞄距离、横向角误差、第一KP自适应系数和第一KD自适应系数计算第一转角分量。
具体地,第一预瞄距离的计算过程包括:
d1
其中,d1
横向角误差的计算过程包括:
其中,φ1
第一KP自适应系数和第一KD自适应系数的计算过程包括:
Kp1=Kp1
FactorP1=FactorSpeedP1*FactorRadiusP1*FactorTrqP1*FactorLateralOffsetP1,
Kd1=Kd1
FactorD1=FactorSpeedD1*FactorRadiusD1*FactorTrqD1*FactorLateralOffsetD1,
式中,Kp1表示第一KP自适应系数,Kd1表示第一KP自适应系数,Kp1
第一转角分量的计算过程包括:
其中,δ
在一个实施例中,基于车辆的横向位置偏差确定PID反馈控制器对应的第二转角分量包括:
计算PID反馈控制器对应的第二预瞄距离、横向位置偏差、第二KP自适应系数和第二KD自适应系数,根据第二预瞄距离、横向位置偏差、第二KP自适应系数和第二KD自适应系数计算第二转角分量。
具体地,第二预瞄距离的计算过程包括:
d2
其中,d2
横向位置偏差的计算过程包括:
Y2
第二KP自适应系数和第二KD自适应系数的计算过程包括:
Kp2=Kp2
FactorP2=FactorSpeedP2*FactorRadiusP2*FactorTrqP2*FactorLateralOffsetP2,
Kd2=Kd2
FactorD2=FactorSpeedD2*FactorRadiusD2*FactorTrqD2*FactorLateralOffsetD2,
式中,Kp2表示第二KP自适应系数,Kd2表示第二KP自适应系数,Kp2
第二转角分量的计算过程包括:
其中,δ
在一个实施例中,车轮转角分量的计算过程包括:
其中,δ
上述基于双反馈控制器的车辆全速域横向控制方法,可以基于车辆的横向误差确定PD反馈控制器对应的第一转角分量,基于车辆的横向位置偏差确定PID反馈控制器对应的第二转角分量,根据车辆纵向车速和道路曲率半径标定前馈补偿弯道的车轮转角分量,对第一转角分量、第二转角分量和车轮转角分量进行求和,根据求和结果进行车辆全速域横向控制,能克服轮胎的侧偏刚度、纵向速度、载荷等参数的变化对车辆横向运动的影响,还能适应车辆全速域下,以及在千变万化的道路下的自动轨迹跟踪,并具有很好的舒适性和平稳性。
附图说明
图1是一个实施例的控制结构图;
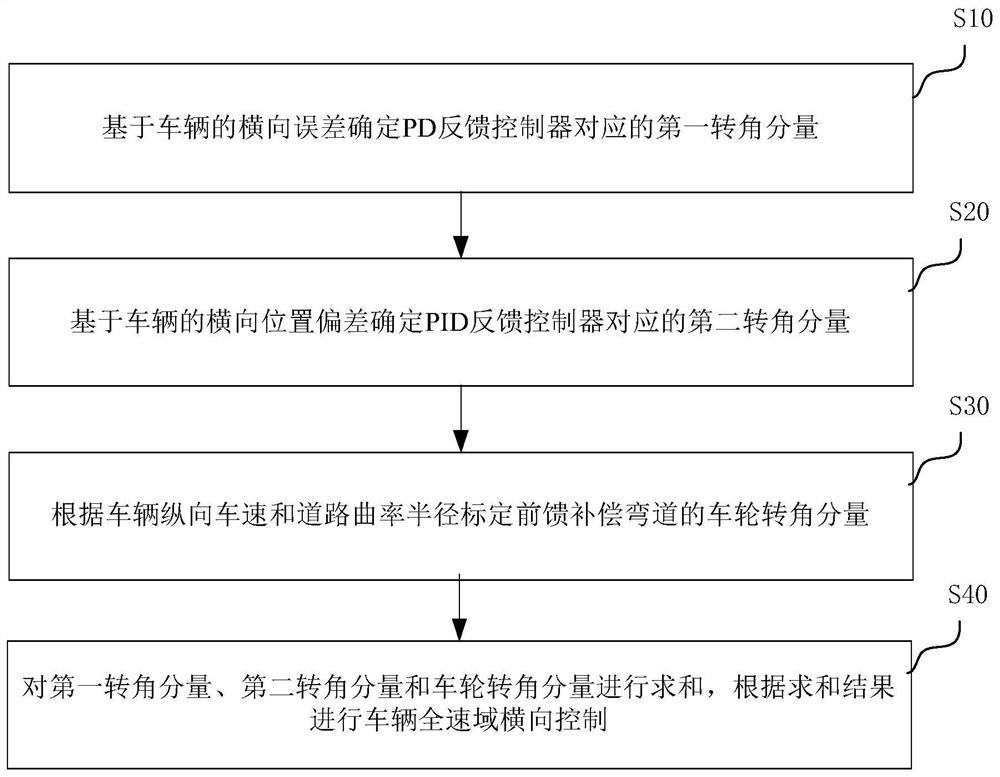
图2是一个实施例的基于双反馈控制器的车辆全速域横向控制方法流程图。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本申请的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
本申请提供的基于双反馈控制器的车辆全速域横向控制方法为一种横向控制算法,由基于预瞄点处的Heading Angle(横向角)的PD(比例微分)反馈控制器、基于车辆前轮处的offset PID(比例积分微分,即后文所述PID反馈控制器)反馈控制器、前馈控制器三部分组成;基于Heading Angle设计的PD控制器主要是让车头方向摆正,当车头方向摆正的时候,由于车辆不足转向或过度转向导致车辆偏右或偏左,这时候引入Offset PID反馈控制器;Offset PID可以通过积分环节消除系统稳态误差。在一个示例中,上述基于双反馈控制器的车辆全速域横向控制方法的控制结构图可以参考图1所示。
参考图2所示,图2为一个实施例的基于双反馈控制器的车辆全速域横向控制方法流程图,包括如下步骤:
S10,基于车辆的横向误差确定PD反馈控制器对应的第一转角分量;
上述步骤可以实现基于Heading Angle误差设计PD反馈控制器。
S20,基于车辆的横向位置偏差确定PID反馈控制器对应的第二转角分量;
上述步骤可以实现基于Offset误差设计PID反馈控制。
S30,根据车辆纵向车速和道路曲率半径标定前馈补偿弯道的车轮转角分量;
上述步骤可以实现根据车辆纵向车速和道路曲率半径标定前馈补偿弯道的车轮转角。
S40,对第一转角分量、第二转角分量和车轮转角分量进行求和,根据求和结果进行车辆全速域横向控制。
在一个实施例中,根据求和结果进行车辆全速域横向控制包括:
对求和结果进行平滑滤波处理,将平滑滤波处理的结果发送给车辆转向系统,使车辆转向系统依据平滑滤波处理进行车辆全速域横向控制。
具体地,对第一转角分量、第二转角分量和车轮转角分量进行求和的过程包括:
δ
δ
上述基于双反馈控制器的车辆全速域横向控制方法,可以基于车辆的横向误差确定PD反馈控制器对应的第一转角分量,基于车辆的横向位置偏差确定PID反馈控制器对应的第二转角分量,根据车辆纵向车速和道路曲率半径标定前馈补偿弯道的车轮转角分量,对第一转角分量、第二转角分量和车轮转角分量进行求和,根据求和结果进行车辆全速域横向控制,能克服轮胎的侧偏刚度、纵向速度、载荷等参数的变化对车辆横向运动的影响,还能适应车辆全速域下,以及在千变万化的道路下的自动轨迹跟踪,并具有很好的舒适性和平稳性。
在一个实施例中,基于车辆的横向误差确定PD反馈控制器对应的第一转角分量包括:
计算PD反馈控制器对应的第一预瞄距离、横向角误差、第一KP自适应系数和第一KD自适应系数,根据第一预瞄距离、横向角误差、第一KP自适应系数和第一KD自适应系数计算第一转角分量。
具体地,第一预瞄距离的计算过程包括:
d1
其中,d1
横向角误差的计算过程包括:
其中,φ1
第一KP自适应系数和第一KD自适应系数的计算过程包括:
Kp1=Kp1
FactorP1=FactorSpeedP1*FactorRadiusP1*FactorTrqP1*FactorLateralOffsetP1,
Kd1=Kd1
FactorD1=FactorSpeedD1*FactorRadiusD1*FactorTrqD1*FactorLateralOffsetD1,
式中,Kp1表示第一KP自适应系数,Kd1表示第一KP自适应系数,Kp1
第一转角分量的计算过程包括:
其中,δ
本实施例采用预瞄理论设计原理,以模拟人驾驶车辆的过程,该过程在模拟人驾驶汽车过程中观测车辆前方过程。
在一个实施例中,基于车辆的横向位置偏差确定PID反馈控制器对应的第二转角分量包括:
计算PID反馈控制器对应的第二预瞄距离、横向位置偏差、第二KP自适应系数和第二KD自适应系数,根据第二预瞄距离、横向位置偏差、第二KP自适应系数和第二KD自适应系数计算第二转角分量。
具体地,第二预瞄距离的计算过程包括:
d2
其中,d2
横向位置偏差的计算过程包括:
Y2
第二KP自适应系数和第二KD自适应系数的计算过程包括:
Kp2=Kp2
FactorP2=FactorSpeedP2*FactorRadiusP2*FactorTrqP2*FactorLateralOffsetP2,
Kd2=Kd2
FactorD2=FactorSpeedD2*FactorRadiusD2*FactorTrqD2*FactorLateralOffsetD2,
式中,Kp2表示第二KP自适应系数,Kd2表示第二KP自适应系数,Kp2
第二转角分量的计算过程包括:
其中,δ
本实施例采用预瞄理论设计原理,以模拟人驾驶车辆的过程,该过程主要模拟人驾驶车辆执行转向动作过程。
具体地,本实施例还采用积分分离与积分饱和设计。其中积分分离包括:当横向偏差大于一定值时不应该加入积分,如果引入积分环节车辆在入弯时由于车辆偏差大,带来积分项比较大,当车辆出弯时积分项短时间内不能消除,严重影响车辆平顺性,一般当横向偏差大于0.1m时不引入积分项;横向偏差大于0.05m时,按照0.05偏差计算积分;当偏差在0.05以内时,积分项正常计算。积分饱和包括:首先引入积分的目的是消除系统的稳态误差和消除前馈补偿带来误差。但是车辆不同车速不同曲率时EPS的静态误差不一样,所以由积分饱和设计推导得到的第二转角分量的计算过程根据车速和曲率自适应一个积分饱和限制。
在一个实施例中,车轮转角分量(前馈转角)的计算过程包括:
其中,δ
本实施例采用预瞄理论设计原理模拟人驾驶车辆的过程,该过程主要模拟人驾驶车辆在入弯时提前执行转向动作的过程。其中涉及的前馈控制器中预瞄点的计算过程包括:
D
D
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
需要说明的是,本申请实施例所涉及的术语“第一\第二\第三”仅仅是区别类似的对象,不代表针对对象的特定排序,可以理解地,“第一\第二\第三”在允许的情况下可以互换特定的顺序或先后次序。应该理解“第一\第二\第三”区分的对象在适当情况下可以互换,以使这里描述的本申请的实施例能够以除了在这里图示或描述的那些以外的顺序实施。
本申请实施例的术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或模块的过程、方法、装置、产品或设备没有限定于已列出的步骤或模块,而是可选地还包括没有列出的步骤或模块,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或模块。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。