无人驾驶汽车的智能避障方法、计算机可读取的存储介质
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及无人驾驶技术领域,特别地,涉及一种无人驾驶车辆的智能避障方法、计算机可读取的存储介质。
背景技术
无人驾驶汽车是通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能汽车,目前,很多汽车厂商都已经推出了无人驾驶车辆。无人驾驶汽车在行驶过程中会遇到很多突发情况,经常会遇到行驶前方路面出现障碍物的情况,如何有效地规避前方障碍物成为无人驾驶汽车亟待解决的关键问题。
发明内容
本发明提供了一种无人驾驶车辆的智能避障方法、计算机可读取的存储介质,可以实现智能化地躲避前方障碍物,提高了无人驾驶的安全性。
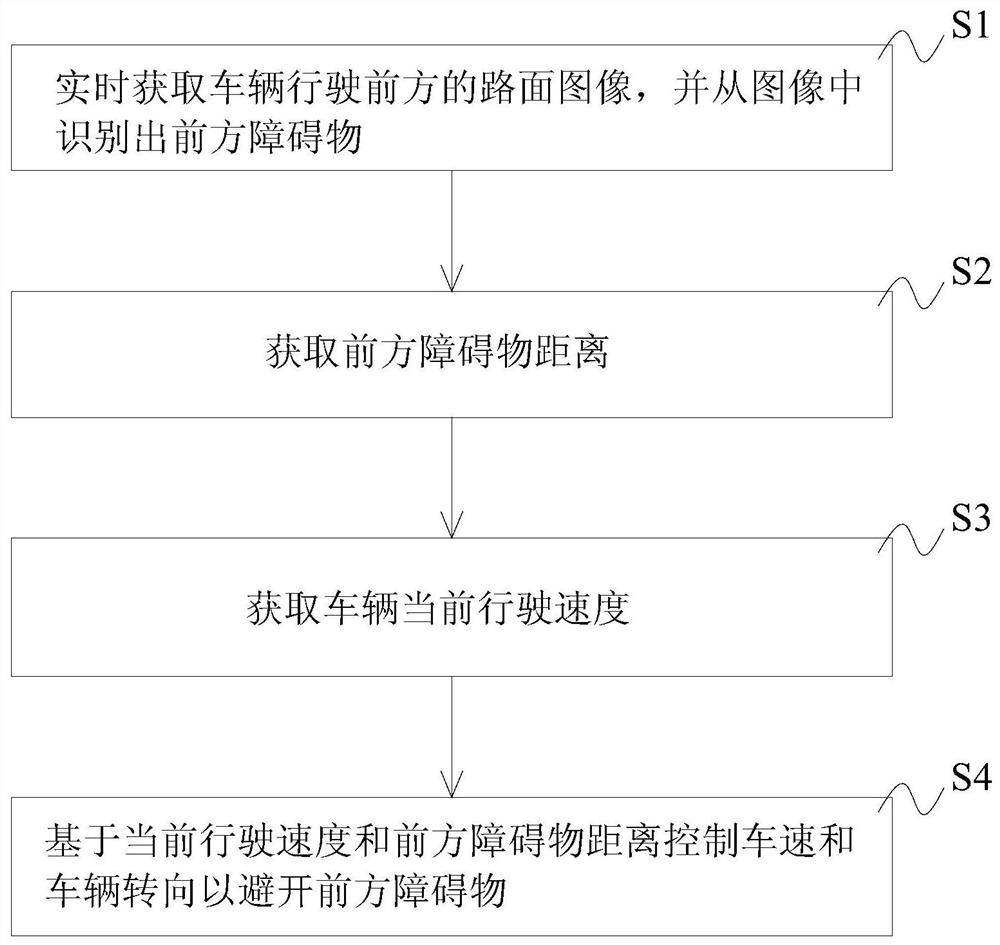
根据本发明的一个方面,提供一种无人驾驶汽车的智能避障方法,包括以下步骤:
步骤S1:实时获取车辆行驶前方的路面图像,并从图像中识别出前方障碍物;
步骤S2:获取前方障碍物距离;
步骤S3:获取车辆当前行驶速度;
步骤S4:基于当前行驶速度和前方障碍物距离控制车速和车辆转向以避开前方障碍物。
进一步地,所述步骤S4中将当前行驶速度和前方障碍物距离作为输入因子输入到训练好的卷积神经网络中,利用卷积神经网络自动输出目标车速和目标转向角度,并控制车辆减速至目标车速和调整方向盘角度至目标转向角度。
进一步地,所述步骤S4还包括以下步骤:
对目标转向角度进行安全性评估,若目标转向角度超过车辆当前行驶速度所允许的最大转向角度,则控制车辆紧急制动,或目标转向角度未超过车辆当前速度所允许的最大转向角度,则控制方向盘按照该目标转向角度进行转向。
进一步地,所述步骤S1中还从图像中识别出前方障碍物的尺寸大小,并将障碍物的尺寸大小与预设的安全阈值进行比对,若障碍物的尺寸小于安全阈值,则不采取任何措施,否则执行步骤S2~S4。
进一步地,所述步骤S1中还从图像中识别出前方障碍物的尺寸大小,并将其作为输入因子输入到训练好的卷积神经网络中。
进一步地,若所述步骤S4中判定无法避开前方障碍物,则还包括以下步骤:
步骤S5:向车内人员发送碰撞警告提示。
进一步地,还包括以下步骤:
步骤S6:获取车辆的当前位置信息,并向救援平台发送救援消息。
本发明还提供一种计算机可读取的存储介质,用于存储进行无人驾驶汽车的智能避障的计算机程序,该计算机程序在计算机上运行时执行如上所述的方法的步骤。
本发明具有以下效果:
本发明的无人驾驶汽车的智能避障方法,通过实时获取车辆前方的路面图像,并基于图像识别技术从图像中识别出前方障碍物,然后获取前方障碍物的距离和车辆当前行驶速度,并同时基于车辆当前行驶速度和障碍物距离来控制车速和转向角度,以躲避前方障碍物,实现了智能化避障作业,提高了无人驾驶的安全性。
除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
构成本申请的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
图1是本发明优选实施例的医疗监测方法的流程示意图。
图2是本发明优选实施例的医疗监测方法的另一实施例的流程示意图。
图3是本发明另一实施例的医疗监测系统的模块结构示意图。
图4是图3中的处理器的子模块结构示意图。
具体实施方式
以下结合附图对本发明的实施例进行详细说明,但是本发明可以由下述所限定和覆盖的多种不同方式实施。
如图1所示,本发明的优选实施例提供一种无人驾驶汽车的智能避障方法,包括以下步骤:
步骤S1:实时获取车辆行驶前方的路面图像,并从图像中识别出前方障碍物;
步骤S2:获取前方障碍物距离;
步骤S3:获取车辆当前行驶速度;
步骤S4:基于当前行驶速度和前方障碍物距离控制车速和车辆转向以避开前方障碍物。
可以理解,本实施例的无人驾驶汽车的智能避障方法,通过实时获取车辆前方的路面图像,并基于图像识别技术从图像中识别出前方障碍物,然后获取前方障碍物的距离和车辆当前行驶速度,并同时基于车辆当前行驶速度和障碍物距离来控制车速和转向角度,以躲避前方障碍物,实现了智能化避障作业,提高了无人驾驶的安全性。
可以理解,所述步骤S1中具体通过车辆上的摄像头来拍摄前方路面图像。
可以理解,所述步骤S2中的障碍物距离可以通过车辆上的激光雷达获得,也可以基于步骤S1中拍摄的图像通过图像识别技术获得。
可以理解,所述步骤S4具体为:将当前行驶速度和前方障碍物距离作为输入因子输入到训练好的卷积神经网络中,利用卷积神经网络自动输出目标车速和目标转向角度,并控制车辆减速至目标车速和调整方向盘角度至目标转向角度。其中,将车辆行驶速度和障碍物距离作为输入因子,将目标车速和目标转向角度作为输出因子,采用大量的正样本和负样本对卷积神经网络进行深度学习训练,将训练好的卷积神经网络作为判定工具来自动输出目标车速和目标转向角度,基于深度学习的基础实现了智能化控制输出,提高了智能避障的精准度和安全性。
可以理解,作为优选的,所述步骤S4还包括以下步骤:
对目标转向角度进行安全性评估,若目标转向角度超过车辆当前行驶速度所允许的最大转向角度,则控制车辆紧急制动,或目标转向角度未超过车辆当前速度所允许的最大转向角度,则控制方向盘按照该目标转向角度进行转向。在卷积神经网络输出目标转向角度后,对目标转向角度进行安全性评估,车辆的每个行驶速度都对应有一个最大转向角度,若超过最大转向角度则存在侧翻的风险,可能会导致更加严重的事故,因此,将目标转向角度与车辆当前行驶速度所允许的最大转向角度进行对比,若超过最大转向角度则控制车辆紧急制动,一方面防止撞上前方障碍物,另一方面规避了车辆侧翻的风险。如果目标转向角度没有超过车辆当前行驶速度所允许的最大转向角度,则控制方向盘按照该目标转向角度进行转向操作。
可以理解,作为优选的,所述步骤S1中还从图像中识别出前方障碍物的尺寸大小,并将障碍物的尺寸大小与预设的安全阈值进行比对,若障碍物的尺寸小于安全阈值,则不采取任何措施,否则执行步骤S2~S4。其中,所述安全阈值根据车辆的底盘尺寸来设定,比如根据车辆底盘的长宽高尺寸设定,如果障碍物的尺寸大小均未超过车辆底盘的长宽高尺寸,则意味着车辆可以直接从障碍物上方行驶过去而不会与其发生剐蹭。而一旦前方障碍物的尺寸大小超过车辆底盘的长宽高尺寸,则需要进行躲避操作。通过预先对障碍物的尺寸大小进行评判,避免出现不必要的减速和转向操作,进一步提高了无人驾驶的安全性。其中,具体通过图像识别技术计算前方障碍物的尺寸大小,例如采用边缘检测算法识别障碍物的长宽高尺寸。
可以理解,作为另一种选择,所述步骤S1中从图像中识别出前方障碍物的尺寸大小后,在所述步骤S4将其作为输入因子输入到训练好的卷积神经网络中。通过进一步将障碍物的尺寸大小引入到卷积神经网络的深度学习中,将障碍物的尺寸作为智能避障输出的影响因子,进一步提高了智能化避障的精准度和无人驾驶的安全性。
可以理解,如图2所示,作为优选的,若所述步骤S4中判定无法避开前方障碍物,则所述无人驾驶汽车的智能避障方法还包括以下步骤:
步骤S5:向车内人员发送碰撞警告提示。
当无法规避前方障碍物时,及时向车辆的乘客发出碰撞警告提示,提醒乘客做好碰撞准备,有利于减轻受伤程度。
可以理解,作为进一步优选的,所述无人驾驶汽车的智能避障方法还包括以下步骤:
步骤S6:获取车辆的当前位置信息,并向救援平台发送救援消息。
当发生碰撞后,可以向医院、交通救援单位或保险公司等救援平台发送车辆的当前位置和求救消息,以便于快速救援。
可以理解,如图3所示,本发明的另一实施例还提供一种无人驾驶车辆的智能避障系统,其优选采用如上所述的智能避障方法,所述系统包括:
摄像头,用于实时拍摄车辆行驶前方的路面图像;
测距装置,用于测量前方障碍物距离;
速度传感器,用于测量车辆当前行驶速度;
处理器,用于从摄像头拍摄的图像中识别出前方障碍物,还用于基于当前行驶速度和前方障碍物距离控制车速和车辆转向以避开前方障碍物。
可以理解,本实施例的无人驾驶汽车的智能避障系统,通过摄像头实时获取车辆前方的路面图像,并基于图像识别技术从图像中识别出前方障碍物,然后通过测距装置获取前方障碍物的距离、通过速度传感器测量车辆当前行驶速度,并同时基于车辆当前行驶速度和障碍物距离来控制车速和转向角度,以躲避前方障碍物,实现了智能化避障作业,提高了无人驾驶的安全性。
可以理解,如图4所示,所述处理器包括预测模块和控制模块,所述预测模块用于基于训练好的卷积神经网络根据输入的当前行驶速度和前方障碍物距离自动输出目标车速和目标转向角度,所述控制模块用于控制车辆减速至目标车速、控制方向盘转动目标转向角度。其中,将车辆行驶速度和障碍物距离作为预测模块的输入因子,将目标车速和目标转向角度作为输出因子,采用大量的正样本和负样本对预测模块中的卷积神经网络进行深度学习训练,将训练好的卷积神经网络作为判定工具来自动输出目标车速和目标转向角度,基于深度学习的基础实现了智能化控制输出,提高了智能避障的精准度和安全性。
可以理解,作为优选的,所述处理器还包括安全性评估模块,用于对目标转向角度进行安全性评估,若目标转向角度超过车辆当前行驶速度所允许的最大转向角度,则所述控制模块控制车辆紧急制动,或目标转向角度未超过车辆当前速度所允许的最大转向角度,则所述控制模块控制方向盘按照该目标转向角度进行转向。在所述预测模块输出目标转向角度后,对目标转向角度进行安全性评估,车辆的每个行驶速度都对应有一个最大转向角度,若超过最大转向角度则存在侧翻的风险,可能会导致更加严重的事故,因此,将目标转向角度与车辆当前行驶速度所允许的最大转向角度进行对比,若超过最大转向角度则控制车辆紧急制动,一方面防止撞上前方障碍物,另一方面规避了车辆侧翻的风险。如果目标转向角度没有超过车辆当前行驶速度所允许的最大转向角度,则控制方向盘按照该目标转向角度进行转向操作。
可以理解,作为优选的,所述处理器还包括尺寸识别模块,用于图像中识别出前方障碍物的尺寸大小,并将障碍物的尺寸大小与预设的安全阈值进行比对,若障碍物的尺寸小于安全阈值,则不采取任何措施,否则将其作为输入因子输入到预测模块中。其中,所述安全阈值根据车辆的底盘尺寸来设定,比如根据车辆底盘的长宽高尺寸设定,如果障碍物的尺寸大小均未超过车辆底盘的长宽高尺寸,则意味着车辆可以直接从障碍物上方行驶过去而不会与其发生剐蹭。而一旦前方障碍物的尺寸大小超过车辆底盘的长宽高尺寸,则需要进行躲避操作。通过预先对障碍物的尺寸大小进行评判,避免出现不必要的减速和转向操作,进一步提高了无人驾驶的安全性。其中,所述尺寸识别模块具体通过图像识别技术计算前方障碍物的尺寸大小,例如采用边缘检测算法识别障碍物的长宽高尺寸。另外,将障碍物的尺寸大小作为输入因子输入到预测模块中,将障碍物的尺寸大小引入到卷积神经网络的深度学习中,障碍物的尺寸作为智能避障输出的影响因子,进一步提高了智能化避障的精准度和无人驾驶的安全性
可以理解,作为优选的,所述处理器还包括碰撞提示模块,用于在所述预测模块判定无法躲避前方障碍物时向车内人员发送碰撞警告提示,比如在车内显示屏上输出提示信息。当无法规避前方障碍物时,及时向车辆的乘客发出碰撞警告提示,提醒乘客做好碰撞准备,有利于减轻受伤程度。
可以理解,作为优选的,所述处理器还包括紧急救援模块,用于获取车辆的当前位置信息,并向救援平台发送救援消息。当发生碰撞后,可以通过紧急救援模块向医院、交通救援单位或保险公司等救援平台发送车辆的当前位置和求救消息,以便于快速救援。
本发明还提供一种计算机可读取的存储介质,用于进行无人驾驶汽车的智能避障的的计算机程序,该计算机程序在计算机上运行时执行如上所述的方法的步骤。
一般计算机可读取介质的形式包括:软盘(floppy disk)、可挠性盘片(flexibledisk)、硬盘、磁带、任何其与的磁性介质、CD-ROM、任何其余的光学介质、打孔卡片(punchcards)、纸带(paper tape)、任何其余的带有洞的图案的物理介质、随机存取存储器(RAM)、可编程只读存储器(PROM)、可抹除可编程只读存储器(EPROM)、快闪可抹除可编程只读存储器(FLASH-EPROM)、其余任何存储器芯片或卡匣、或任何其余可让计算机读取的介质。指令可进一步被一传输介质所传送或接收。传输介质这一术语可包含任何有形或无形的介质,其可用来存储、编码或承载用来给机器执行的指令,并且包含数字或模拟通信信号或其与促进上述指令的通信的无形介质。传输介质包含同轴电缆、铜线以及光纤,其包含了用来传输一计算机数据信号的总线的导线。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。