一种全景头部定位方法、定位系统及其操作方法
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及全景头部定位领域,具体涉及一种全景头部定位方法、定位系统及其操作方法。
背景技术
在牙科CBCT中,全景扫描前需要对头部进行定位,以获取准确的图像;传统方法通常使用颌托、咬嘴来确定下巴和牙齿位置,借助激光灯辅助,来确定患者头颅的角度,该种方法需要人工判断来进行患者定位,对操作者有一定的要求,如果判断错误容易导致成像拍摄失败;颌托咬嘴等支撑结构还会遮挡面部,造成面部扫描时部分区域缺失;每位患者定位前需要更换相关一次性保护套,造成浪费。
发明内容
本发明要解决的技术问题是现有的方案需要人工判断来进行患者定位,对操作者有一定的要求,如果判断错误容易导致成像拍摄失败;颌托咬嘴等支撑结构还会遮挡面部,造成面部扫描时部分区域缺失,本发明提供一种全景头部定位方法,通过结构光三维表面重建技术获得头部的三维表面结构,识别头部面部的下巴、嘴等重要解剖结构,利用这些解剖结构的位置,计算头部的位置和姿态,实现头部定位,作为全景成像的位置基准;采用本方法无需颌托、咬嘴、激光灯等辅助,不但能免去了人工判断的过程,降低操作复杂度,减少用户学习成本,还能免去相关一次性保护套的使用,减少额外的浪费,用以解决现有技术导致的缺陷。
本发明还提供一种全景头部定位系统;
本发明还提供一种全景头部定位系统的操作方法;
为解决上述技术问题本发明提供以下的技术方案:
第一方面,一种全景头部定位方法,其中,包含以下步骤:
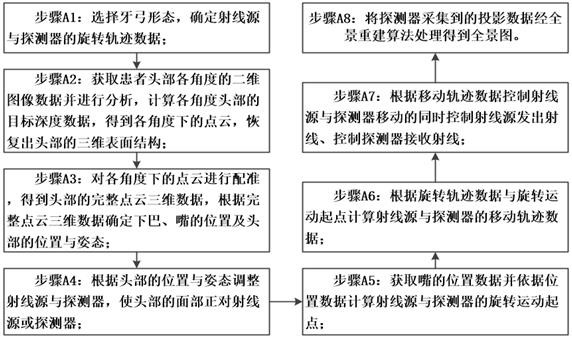
步骤A1:选择牙弓形态,确定射线源与探测器的旋转轨迹数据,旋转轨迹数据需要进行预设,预设出的旋转轨迹要满足:1.每拍摄一帧,滑环组件驱动连接支架旋转一个固定角度;2.探测器、射线源与牙齿的相对距离要保持一定,以保证放大率;3.探测器、射线源连线尽量和牙弓曲面保持垂直;4.旋转中心的X、Y坐标不要超过一定范围,在这些条件的限制下,采用粒子群优化算法,计算最大程度满足上述条件的坐标系,图2为椭圆形牙弓形态下射线源和探测器预设旋转轨迹;
步骤A2:获取患者头部各角度的二维图像数据并进行分析,计算各角度头部的目标深度数据,得到各角度下的点云,恢复出头部的三维表面结构;
步骤A3:对各角度下的点云进行配准,得到头部的完整点云三维数据,根据完整点云三维数据确定下巴、嘴的位置及头部的位置与姿态;
步骤A4:根据头部的位置与姿态调整射线源与探测器,使头部的面部正对射线源或探测器;
步骤A5:获取嘴的位置数据并依据位置数据计算射线源与探测器的旋转运动起点;
步骤A6:根据旋转轨迹数据与旋转运动起点计算射线源与探测器的移动轨迹数据;
步骤A7:根据移动轨迹数据控制射线源与探测器移动的同时控制射线源发出射线、控制探测器接收射线;
步骤A8:将探测器采集到的投影数据经全景重建算法处理得到全景图。
上述的一种全景头部定位方法,其中,步骤A2中采用3D相机模组获取患者头部各角度的二维图像数据,并根据三角测量法视差原理重建得到目标深度数据,计算公式如下:
其中
f为摄像头焦距;
为目标点的视差值。
上述的一种全景头部定位方法,其中,步骤A3中对各角度的点云通过迭代最近点算法 (Iterative Closest Point,简称ICP)进行配准,得到头部的完整点云三维数据,通过完整点云三维数据并依据五官的特征来计算、确定下巴、嘴的位置及头部的位置与姿态等三维数据信息,其中头部姿态可分为沿三维各轴的旋转角度;
具体配准过程如下:
将各个角度的点云进行刚体变换,并统一到摄像头初始位置坐标系,处理得到完整点云,根据完整点云计算得到三维数据;
计算完整点云三维数据的公式如下:
其中,
上述的一种全景头部定位方法,其中,步骤A8采用的全景重建算法为数字化体层融合算法(digital tomosynthesis),通过覆盖叠加扫描得到的一系列2D图像来重建牙齿层的全景图,全景图重建过程包含以下步骤:
步骤B1:计算覆盖量,计算公式如下:
其中,
步骤B2:计算归一化放大倍数,放大倍数比例因子的计算公式为:
其中,
步骤B3:计算线性插值;
其中
上述的一种全景头部定位方法,其中,x和y所在的坐标系为步骤A4后射线源和探测器组成的平面坐标系。
第二方面,一种全景头部定位系统,其中,包含射线源、探测器、3D相机模组、控制器、立柱、机械臂、连接支架,所述立柱顶部设有连接于所述机械臂一端的升降器,所述机械臂的另一端安装有连接于所述连接支架顶部的滑环组件,所述射线源、所述探测器、所述3D相机模组均连接于所述连接支架的底部,所述射线源与所述探测器分别设置于所述连接支架的两侧,所述3D相机模组设置于所述射线源与所述探测器之间任意一侧;
所述控制器分别控制连接所述射线源、所述探测器、所述3D相机模组、所述升降器、所述滑环组件。
上述的一种全景头部定位系统,其中,所述3D相机模组包含结构光源、相机,所述相机包含有一个或多个摄像头,所述控制器分别控制连接所述结构光源、所述相机。
上述的一种全景头部定位系统,其中,所述结构光源为数字光处理投影仪。
上述的一种全景头部定位系统,其中,所述滑环组件包含转动器、平移器,所述转动器的上下两端分别连接于所述机械臂的底部、所述平移器的顶部,所述连接支架的顶部安装有连接所述平移器底部的平移轨道,所述控制器分别控制连接所述转动器、所述平移器。
第三方面,一种全景头部定位系统的操作方法,其中,包含以下步骤:
步骤C1:患者位于射线源与探测器之间,调整患者头部至预拍摄区域;
步骤C2:选择牙弓形态,确定射线源与探测器的旋转轨迹数据;
步骤C3:控制器控制升降器、滑环组件工作调整3D相机模组的位置并控制3D相机模组工作获取患者头部各角度的二维图像数据并进行分析,计算各角度头部的目标深度数据,得到各角度下的点云,恢复出头部的三维表面结构;
步骤C4:对各角度下的点云进行配准,得到头部的完整点云三维数据,根据完整点云三维数据确定下巴、嘴的位置及头部的位置与姿态;
步骤C5:控制器根据头部的位置与姿态调整射线源与探测器的位置,使头部的面部正对射线源或探测器;
步骤C6:获取嘴的位置数据并依据位置数据计算射线源与探测器的旋转运动起点;
步骤C7:根据旋转轨迹数据与旋转运动起点计算射线源与探测器的移动轨迹数据;
步骤C8:控制器根据移动轨迹数据控制射线源与探测器移动的同时控制射线源发出射线、控制探测器接收射线;
步骤C9:将探测器采集到的投影数据经全景重建算法处理得到全景图。
依据上述本发明一种全景头部定位方法、定位系统及其操作方法提供的技术方案具有以下技术效果:
通过结构光三维表面重建技术获得头部的三维表面结构,识别头部面部的下巴、嘴等重要解剖结构,利用这些解剖结构的位置,计算头部的位置和姿态,实现头部定位,作为全景成像的位置基准;采用本方法无需颌托、咬嘴、激光灯等辅助,不但能免去了人工判断的过程,降低操作复杂度,减少用户学习成本,还能免去相关一次性保护套的使用,减少额外的浪费。
附图说明
图1为本发明一种全景头部定位方法的流程图;
图2为依据本发明一种全景头部定位方法重建的牙齿层全景图;
图3为本发明一种全景头部定位方法中椭圆形牙弓形态下射线源和探测器预设旋转轨迹示意图;
图4为本发明一种全景头部定位系统的结构示意图;
图5为本发明一种全景头部定位系统的操作方法的流程图。
其中,附图标记如下:
射线源101、探测器102、3D相机模组103、控制器104、立柱105、机械臂106、连接支架107、滑环组件108、旋转中心109。
具体实施方式
为了使发明实现的技术手段、创造特征、达成目的和功效易于明白了解,下结合具体图示,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。
基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。
同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
本发明的第一实施例是提供一种全景头部定位方法、定位系统及其操作方法,目的是通过结构光三维表面重建技术获得头部的三维表面结构,识别头部面部的下巴、嘴等重要解剖结构,利用这些解剖结构的位置,计算头部的位置和姿态,实现头部定位,作为全景成像的位置基准;采用本方法无需颌托、咬嘴、激光灯等辅助,不但能免去了人工判断的过程,降低操作复杂度,减少用户学习成本,还能免去相关一次性保护套的使用,减少额外的浪费。
如图1-2所示,第一方面,第一实施例,一种全景头部定位方法,其中,包含以下步骤:
步骤A1:选择牙弓形态,确定射线源101与探测器102的旋转轨迹数据,旋转轨迹数据需要进行预设,预设出的旋转轨迹要满足:1.每拍摄一帧,滑环组件108驱动连接支架107旋转一个固定角度;2.探测器102、射线源101与牙齿的相对距离要保持一定,以保证放大率;3.探测器102、射线源101连线尽量和牙弓曲面保持垂直;4.旋转中心109的X、Y坐标不要超过一定范围,在这些条件的限制下,采用粒子群优化算法,计算最大程度满足上述条件的坐标系,图3为椭圆形牙弓形态下射线源101和探测器102预设旋转轨迹;
步骤A2:获取患者头部各角度的二维图像数据并进行分析,计算各角度头部的目标深度数据,得到各角度下的点云,恢复出头部的三维表面结构;
步骤A3:对各角度下的点云进行配准,得到头部的完整点云三维数据,根据完整点云三维数据确定下巴、嘴的位置及头部的位置与姿态;
步骤A4:根据头部的位置与姿态调整射线源101与探测器102,使头部的面部正对射线源101或探测器102;
步骤A5:获取嘴的位置数据并依据位置数据计算射线源101与探测器102的旋转运动起点;
步骤A6:根据旋转轨迹数据与旋转运动起点计算射线源101与探测器102的移动轨迹数据;
步骤A7:根据移动轨迹数据控制射线源101与探测器102移动的同时控制射线源101发出射线、控制探测器102接收射线;
步骤A8:将探测器102采集到的投影数据经全景重建算法处理得到全景图。
其中,步骤A2中采用3D相机模组103获取患者头部各角度的二维图像数据,并根据三角测量法视差原理重建得到目标深度数据,计算公式如下:
其中
f为摄像头焦距;
其中,步骤A3中对各角度的点云通过迭代最近点算法 (Iterative ClosestPoint,简称ICP)进行配准,得到头部的完整点云三维数据,通过完整点云三维数据并依据五官的特征来计算、确定下巴、嘴的位置及头部的位置与姿态等三维数据信息,其中头部姿态可分为沿三维各轴的旋转角度;
具体配准过程如下:
将各个角度的点云进行刚体变换,并统一到摄像头初始位置坐标系,处理得到完整点云,根据完整点云计算得到三维数据;
计算完整点云三维数据的公式如下:
其中,
其中,步骤A8采用的全景重建算法为数字化体层融合算法(digitaltomosynthesis),通过覆盖叠加扫描得到的一系列2D图像来重建牙齿层的全景图,全景图重建过程包含以下步骤:
步骤B1:计算覆盖量,计算公式如下:
其中,
步骤B2:计算归一化放大倍数,放大倍数比例因子的计算公式为:
其中,
步骤B3:计算线性插值;
其中,
其中,x和y所在的坐标系为步骤A4后射线源101和探测器102组成的平面坐标系。
如图4所示,第二方面,第二实施例,一种全景头部定位系统,其中,包含射线源101、探测器102、3D相机模组103、控制器104、立柱105、机械臂106、连接支架107,立柱105顶部设有连接于机械臂106一端的升降器,机械臂106的另一端安装有连接于连接支架107顶部的滑环组件108,射线源101、探测器102、3D相机模组103均连接于连接支架107的底部,射线源101与探测器102分别设置于连接支架107的两侧,3D相机模组103设置于射线源101与探测器102之间任意一侧;
控制器104分别控制连接射线源101、探测器102、3D相机模组103、升降器、滑环组件108。
其中,3D相机模组103包含结构光源、相机,相机包含有一个或多个摄像头,控制器104分别控制连接结构光源、相机。
其中,结构光源为数字光处理投影仪。
其中,滑环组件108包含转动器、平移器,转动器的上下两端分别连接于机械臂106的底部、平移器的顶部,连接支架107的顶部安装有连接平移器底部的平移轨道,控制器104分别控制连接转动器、平移器,滑环组件108主要用于带动整个连接支架107平移与旋转。
如图5所示,第三方面,第三实施例,一种全景头部定位系统的操作方法,其中,包含以下步骤:
步骤C1:患者位于射线源101与探测器102之间,调整患者头部至预拍摄区域;
步骤C2:选择牙弓形态,确定射线源101与探测器102的旋转轨迹数据;
步骤C3:控制器104控制升降器、滑环组件108工作调整3D相机模组103的位置并控制3D相机模组103工作获取患者头部各角度的二维图像数据并进行分析,计算各角度头部的目标深度数据,得到各角度下的点云,恢复出头部的三维表面结构;
步骤C4:对各角度下的点云进行配准,得到头部的完整点云三维数据,根据完整点云三维数据确定下巴、嘴的位置及头部的位置与姿态;
步骤C5:控制器104根据头部的位置与姿态调整射线源101与探测器102的位置,使头部的面部正对射线源101或探测器102;
步骤C6:获取嘴的位置数据并依据位置数据计算射线源101与探测器102的旋转运动起点;
步骤C7:根据旋转轨迹数据与旋转运动起点计算射线源101与探测器102的移动轨迹数据;
步骤C8:控制器104根据移动轨迹数据控制射线源101与探测器102移动的同时控制射线源101发出射线、控制探测器102接收射线;
步骤C9:将探测器102采集到的投影数据经全景重建算法处理得到全景图。
综上,本发明的一种全景头部定位方法、定位系统及其操作方法,通过结构光三维表面重建技术获得头部的三维表面结构,识别头部面部的下巴、嘴等重要解剖结构,利用这些解剖结构的位置,计算头部的位置和姿态,实现头部定位,作为全景成像的位置基准;采用本方法无需颌托、咬嘴、激光灯等辅助,不但能免去了人工判断的过程,降低操作复杂度,减少用户学习成本,还能免去相关一次性保护套的使用,减少额外的浪费。
以上对发明的具体实施例进行了描述。需要理解的是,发明并不局限于上述特定实施方式,其中未尽详细描述的设备和结构应该理解为用本领域中的普通方式予以实施;本领域技术人员可以在权利要求的范围内做出各种变形或修改做出若干简单推演、变形或替换,这并不影响发明的实质内容。
- 一种全景头部定位方法、定位系统及其操作方法
- 一种360°全景摄像定位系统及其定位方法