一种用于区域火灾监测的巡逻机器人
文献发布时间:2023-06-19 09:49:27
技术领域
本发明属于巡逻机器人技术领域,涉及一种火灾巡逻机器人,具体是一种用于区域火灾监测的巡逻机器人。
背景技术
火灾是威胁人类生存的重大隐患,尤其是近年来,频发的火灾给人们造成了重大的生命和财产损失。国内火灾报警技术发展很快,从最早采用的双绞线信号传输技术到后来的电力载波技术,再到如今的无线信号传输技术,各种烟雾传感器也在不断更新换代。虽然我国火灾报警技术发展趋势较好,但仍存在智能化程度低、适用范围小等问题。
发明内容
本发明的目的在于提供一种用于区域火灾监测的巡逻机器人,实现了对区域火灾的智能监测,不仅极大的节约了劳动力,并且安全性更高。
本发明的目的可以通过以下技术方案实现:
一种用于区域火灾监测的巡逻机器人,包括任务设定模块、路线规划模块、自动巡航模块、烟雾采集模块、光照采集模块、温度采集模块、数据分析模块、卫星定位模块以及火灾报警模块;
所述任务设定模块,用于管理人员预先设定巡逻机器人的巡逻任务,包括巡逻区域和巡逻时间,并分别输出到路线规划模块和自动巡航模块;
所述路线规划模块,根据管理人员设定的巡逻区域,自主规划巡逻路线,并将巡逻路线输出到自动巡航模块;
所述自动巡航模块,根据管理人员设定的巡逻时间,开启自动巡航,沿着路线规划模块规划的巡逻路线进行火灾监测训练;
所述烟雾采集模块,实时采集巡逻区域的烟雾浓度数据,并输出到数据分析模块;
所述光照采集模块,实时采集巡逻区域的光照强度数据,并输出到数据分析模块;
所述温度采集模块,实时采集巡逻区域的温度数据,并输出到数据分析模块;
所述数据分析模块,对烟雾采集模块、光照采集模块、温度采集模块分别采集的烟雾浓度数据、光照强度数据、温度数据进行综合分析,当其中一项或多项数据超过预设阈值时,输出报警信号到火灾报警模块;
所述卫星定位模块,采用GPS卫星定位设备,用于实时获取巡逻机器人当前的位置数据,供火灾报警模块调用;
所述火灾报警模块,根据数据分析模块输出的报警信号,发送火灾警报给管理人员,并同时从卫星定位模块获取当前的位置数据发送给管理人员。
进一步地,所述烟雾采集模块采用烟雾浓度传感器,所述光照采集模块采用光照强度传感器,所述温度采集模块采用温度传感器。
本发明的有益效果:本发明提供的用于区域火灾监测的巡逻机器人,管理人员可预先设定机器人的巡逻区域和巡逻时间,机器人根据巡逻区域和巡逻时间进行巡逻,并实时采集巡逻区域的烟雾浓度数据、光照强度数据、温度数据,当其中一项或多项数据超过预设阈值时,输出报警信号通知管理人员,并同时利用GPS卫星定位设备获取巡逻机器人当前的位置数据发送给管理人员,方便管理人员及时准确的找到火灾发生的位置,进行灭火救援工作,实现了对区域火灾的智能监测,不仅极大的节约了劳动力,并且安全性更高。
附图说明
下面结合附图和具体实施例对本发明作进一步详细描述。
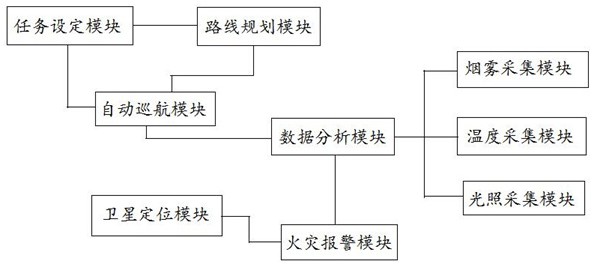
图1是本发明的系统示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
在本发明的描述中,需要理解的是,术语“开孔”、“上”、“下”、“厚度”、“顶”、“中”、“长度”、“内”、“四周”等指示方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的组件或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。
如图1所示,本发明提供了一种用于区域火灾监测的巡逻机器人,包括任务设定模块、路线规划模块、自动巡航模块、烟雾采集模块、光照采集模块、温度采集模块、数据分析模块、卫星定位模块以及火灾报警模块。
任务设定模块,用于管理人员预先设定巡逻机器人的巡逻任务,包括巡逻区域和巡逻时间,并分别输出到路线规划模块和自动巡航模块。
路线规划模块,根据管理人员设定的巡逻区域,自主规划巡逻路线,并将巡逻路线输出到自动巡航模块。
自动巡航模块,根据管理人员设定的巡逻时间,开启自动巡航,沿着路线规划模块规划的巡逻路线进行火灾监测训练。
烟雾采集模块,采用烟雾浓度传感器,实时采集巡逻区域的烟雾浓度数据,并输出到数据分析模块。
光照采集模块,采用光照强度传感器,实时采集巡逻区域的光照强度数据,并输出到数据分析模块。
温度采集模块,采用温度传感器,实时采集巡逻区域的温度数据,并输出到数据分析模块。
数据分析模块,对烟雾采集模块、光照采集模块、温度采集模块分别采集的烟雾浓度数据、光照强度数据、温度数据进行综合分析,当其中一项或多项数据超过预设阈值时,输出报警信号到火灾报警模块。
卫星定位模块,采用GPS卫星定位设备,用于实时获取巡逻机器人当前的位置数据,供火灾报警模块调用。
火灾报警模块,根据数据分析模块输出的报警信号,发送火灾警报给管理人员,并同时从卫星定位模块获取当前的位置数据发送给管理人员。
本发明提供的用于区域火灾监测的巡逻机器人,管理人员可预先设定机器人的巡逻区域和巡逻时间,机器人根据巡逻区域和巡逻时间进行巡逻,并实时采集巡逻区域的烟雾浓度数据、光照强度数据、温度数据,当其中一项或多项数据超过预设阈值时,输出报警信号通知管理人员,并同时利用GPS卫星定位设备获取巡逻机器人当前的位置数据发送给管理人员,方便管理人员及时准确的找到火灾发生的位置,进行灭火救援工作,实现了对区域火灾的智能监测,不仅极大的节约了劳动力,并且安全性更高。
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上内容仅仅是对本发明结构所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
- 一种用于区域火灾监测的巡逻机器人
- 一种基于区域地图标识的机器人巡逻方法及机器人设备