一种用于网约车的安全监测方法及系统
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及车载导航及监测系统技术领域,特别涉及,一种用于网约车的安全监测方法及系统。
背景技术
如今,“滴滴打车”俨然成为一种具有时代特色的交通方式,“滴滴”一直在如火如荼的发展,然而其存在的安全隐患被高速的发展所掩盖。近年来,和以往的传统出租车相比,网约车主身份背景参差不齐、难以对其有系统的约束,导致安全问题频频发生。
有数据显示,在2016年的三月,滴滴出行使用量己超越Uber,日活跃用户也是四倍于Uber。然而从滴滴成立之初到目前为止,事故接二连三,顺风车业务一度面临下线的危机。虽然各种各样的安全措施不断出台,可是已经停滞的顺风车却迟迟没有重新上线的趋势。
安全问题是交通服务业的重中之重,针对上述网约车出现的问题,亟需设计一款解决现有技术所存在的难以对网约车主身份进行系统的管理与约束导致安全性过低,且不能实时获取网约车的精确位置信息、司机与乘客状态信息,不能及时反馈处理,导致事故发生的问题的系统及方法,来保障人们出行的安全性。
发明内容
针对上述缺陷,本发明解决的技术问题在于,提供一种用于网约车的安全监测方法及系统,以解决现在技术所存在的难以对网约车主身份进行系统的管理与约束导致安全性过低,且不能实时获取网约车的精确位置信息、司机与乘客状态信息,不能及时反馈处理,导致事故发生的问题。
本发明提供了一种用于网约车的安全监测方法,具体步骤包括:
步骤1、通过面部识别的方式核实司机信息;
步骤2、基于卫星定位和航迹推测的结果,实时获取载客车的精确位置;
步骤3、获取车内语言交流信息,对车内的交流进行对话实时分析;
步骤4、根据载客车位置,结合面部识别以及语音识别进行分析,实时估算载客过程中的危险系数;
步骤5、根据载客过程中的危险系数判断是否要远程报警或者远程锁车。
优选地,所述步骤2的具体步骤包括:
步骤2.1、根据卫星定位信息,实时获取载客车的卫星定位坐标;
步骤2.2、根据卫星定位坐标和载客车的行驶状态信息,进行航迹推算得到精确定位信息;
步骤2.3、实时卫星定位坐标无法获取时,依据卫星定位信号消失前的定位信息,通过航迹推算方法获取精确定位信息。
优选地,所述步骤2.3的具体步骤包括:
步骤2.3.1、以信号消失前的准确坐标为原点,以信号消失前载客车的行驶方向为y轴,以与y轴垂直的水平直线方向为x轴,建立参考坐标系;
步骤2.3.2、获取载客车路程、速度信息,并根据行驶路线推测得到载客车的实时位置坐标为
步骤2.3.3、根据信号消失前的经纬度坐标,定位得到载客车的实时经纬度坐标为
优选地,所述步骤1的具体步骤包括:
步骤1.1、上传载客车司机本人的面部图片;
步骤1.2、根据上传的面部图片提取面部特征值,并将其对应的数据进行储存;
步骤1.3、开车前进行人脸识别,识别后上传识别信息;
步骤1.4、将上传的识别信息与存储的面部特征值进行匹配,得到匹配结果;
步骤1.5、将匹配结果反馈回载客车,并控制载客车的开关状态。
优选地,所述步骤1.3的具体步骤包括:
步骤1.3.1、选取训练集下指定个数的图像,得到人脸样本矩阵
步骤1.3.2、求得指定图像上每行元素数据的均值,将每行元素的数据与均值相减,得到X的协方差矩阵C和C的特征向量,其中每行元素的数据代表一张人脸样本图像;
步骤1.3.3、将所述特征向量对应的特征值降序排列,对特征向量进行变换降低其维数,得到降维后的特征值和特征向量,再变换得到原训练样本的特征向量;
步骤1.3.4、根据原训练样本的特征向量构建人脸投影空间,从而得到投影特征空间,获得样本在特征空间上的投影特征
步骤1.3.5、将每一张识别图像投影到特征空间得到投影特征系数,采用欧氏距离法,将识别图像的投影特征系数与训练样本的投影特征系数比较,得到人脸识别概率。
优选地,步骤4中危险系数的判断方法具体步骤包括:
步骤4.1、根据实时获取的司机的面部识别信息,判断司机是否出现中途换人的情况;
步骤4.2、根据精确位置信息,判断载客车是否按照行驶在正常轨迹上;
步骤4.3、根据获取的对话信息,语音识别判断司机与乘客的状态;
步骤4.4、根据面部识别信息,判断司机的面部表情及状态,从而判断司机是否处于危险环境。
优选地,所述步骤3的具体步骤包括:
步骤3.1、设置采样频道数并量化位数;
步骤3.2、读取车内音频信号,并将音频信号进行录制并存储;
步骤3.3、优化音频并改变文件格式,对音频文件进行识别,得到识别结果并进行后续的处理控制。
本发明还提供一种用于网约车的安全监测系统包括:
车载终端,设有行车控制器,所述行车控制器用于控制所述车载终端的运行状态;
监测装置,设置于所述车载终端上、且与北斗卫星电连接;
通讯装置,设置于所述车载终端上,分别与所述监测装置和所述车载终端电连接;
远程监控设备,与所述通讯装置电连接、且设有航迹计算模块。
优选地,所述监测装置包括:
人脸识别模块,设置于所述车载终端上,与所述通讯装置电连接;
智能语音模块,设置于所述车载终端上,与所述通讯装置电连接;
定位模块,设置于所述车载终端上,分别与所述北斗卫星和所述通讯装置电连接。
优选地,所述行车控制器设有信息采集器,所述信息采集器用于收集所述车载终端行驶的转速信息、整车角度信息、行驶速度信息、底盘倾斜角度信息。
由上述方案可知,本发明提供的一种用于网约车的安全监测方法,与现有技术相比,该方法运用航迹推算法与北斗导航组合进行载客车定位,使得在北斗导航卫星信号受到影响时,可以通过航迹推算实现高精度、高可靠性的载客车实时定位;辅以面部识别、语音识别方法对车内乘员进行实时监督,当乘客或司机发生或面临危险时,远程操控锁车并自动报警传递位置信息,从而保障乘客或司机的生命安全。本发明还提供的一种用于网约车的安全监测系统,该系统通过车载终端提供基本的出行服务;远程监控设备进行远程监控并处理接收信息及发送相应指令;监测装置与远程监控设备配合实现人员识别核查、位置锁定、航向监测、车内对话分析监督、远程锁车以及自动报警的功能;通讯装置进行指令的收发,实现监测装置、车载终端与远程监控设备之间的信息通讯;行车控制器实现行车制动。本发明实时获取网约车的精确位置信息、司机与乘客状态信息,根据危险系数及时做出反应,避免事故发生,有效对乘客及司机进行实时保护,安全更高,适于广泛推广。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明实施例提供的一种用于网约车的安全监测方法的过程框图一;
图2为本发明实施例提供的一种用于网约车的安全监测方法的过程框图二;
图3为本发明实施例提供的一种用于网约车的安全监测方法的过程框图三;
图4为本发明实施例提供的一种用于网约车的安全监测方法的过程框图四;
图5为本发明实施例提供的一种用于网约车的安全监测方法的过程框图五;
图6为本发明实施例提供的一种用于网约车的安全监测方法的过程框图六;
图7为本发明实施例提供的一种用于网约车的安全监测方法的过程框图七;
图8为本发明实施例提供的一种用于网约车的安全监测系统的结构框图一;
图9为本发明实施例提供的一种用于网约车的安全监测系统的结构框图二。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请一并参阅图1至图9,现对本发明提供的一种用于网约车的安全监测方 法的一种具体实施方式进行说明。该种用于网约车的安全监测方法的具体步 骤包括:
S1、通过面部识别方式核实司机信息,载客车的驾驶门禁系统监督一车 一人相对应,通过人脸识别系统进行面部识别从而核实司机信息,本步骤具 体的实现步骤可以为:
S1.1、上传载客车司机本人的面部图片,即采集司机照片,司机可以通过 手机APP上传本人的面部图片;
S1.2、根据上传的面部图片提取面部特征值,并将其对应的数据进行储存;
提取面部特征值的具体实现步骤可以为:对采集到的司机面部照片进行 灰度化、直方图均衡化处理;进行面部信息检测;通过Adaoost算法提取面部 特征值,也可以通过Adaboost算法与Haar特征(Haar-like features哈尔特征) 相结合的方法提取面部特征值,该方法使算法的性能大幅度提升,在进行识 别的时候可以得到更好的效果。
S1.3、开车前用户手机终端通过PCA(principal components analysis主分量分析)进行人脸识别,识别后上传识别信息,本步骤具体的实现步骤可以为:
S1.3.1、选取训练集下指定个数的图像,得到人脸样本矩阵
S1.3.2、求得指定图像上每行元素数据的均值,将每行元素的数据与均值相减,得到X的协方差矩阵C和C的特征向量,其中每行元素的数据代表一张人脸样本图像;
S1.3.3、将所述特征向量对应的特征值降序排列,对特征向量进行变换降低其维数,得到降维后的特征值和特征向量,再变换得到原训练样本的特征向量;
S1.3.4、根据原训练样本的特征向量构建人脸投影空间,从而得到投影特征空间,获得样本在特征空间上的投影特征
S1.3.5、将每一张识别图像投影到特征空间得到投影特征系数,采用欧氏距离法,将识别图像的投影特征系数与训练样本的投影特征系数比较,每一张图像
人脸识别的过程采用特征脸方法经过K-L变换(Karhunen-Loeve Transform)后由原来的高纬度向量转换成低纬度向量子空间,达到了非常好的降维效果,而且其运算复杂度低识别速度快,同时易于实现、识别率高。
S1.4、将上传的识别信息与存储的面部特征值进行匹配,得到匹配结果;
S1.5、将匹配结果反馈回载客车,并控制载客车的开关状态,若识别信息与数据库信息匹配,控制器则驱动磁力锁开锁,司机则可用钥匙解除汽车锁定;否则汽车无法解锁。
S2、基于北斗信号增强后的定位和航迹推测结果,实时检测载客车的精确位置;
载客车当前位置的经纬度可以通过北斗卫星获取,同时也可运用北斗卫星自带的双向卫星通讯服务,北斗系统定位的方式可以实现实时监测航迹,维护人身安全。由于地形和环境带来的干扰,卫星通讯无法正常进行时定位会受到限制,为了避免在偏僻环境中定位不准确而使乘客或司机发生危险,通过北斗卫星定位与航迹推算相结合的方式,获取相对准确的位置信息。
本步骤具体的实现步骤可以为:
S2.1、根据卫星定位信息,实时获取载客车的卫星定位坐标;
S2.2、根据卫星定位坐标和载客车的行驶状态信息,进行航迹推算得到精确定位信息;
S2.3、实时卫星定位坐标无法获取时,即载客车行驶至卫星定位死角时,依据卫星定位信号消失前的定位信息,通过航迹推算方法获取精确定位信息。
该步骤使用组合导航算法,即汽车正常行驶的时候通过北斗导航对其进行定位,而当卫星信号受到阻拦的时候,则启动DR算法对汽车的当前位置进行合理推测。DR(DeadReckoning)算法是利用现有的坐标,在传统定位方式受限制的情况下,对已知的行驶方向、行驶速度和行车之间进行分析,对目标位置产生一个合理的估算。这种方式不受外界环境影响,通过车轮上搭载的电磁计数传感器,计算车轮旋转发出的脉冲数量,得到车在这段时间的行程。根据在目前时间的行驶路程,计算出汽车行驶的速度。当计数时间比较短的时候,该时刻的平均速度则可以近似等于瞬时速度。
本步骤具体的实现步骤可以为:
S2.3.1、以信号消失前的准确坐标为原点,以信号消失前载客车的行驶方向为y轴,以与y轴垂直的水平直线方向为x轴,建立参考坐标系;
S2.3.2、通过车轮上的测速器获取汽车路程、速度信息,并根据行驶路线推测得到每时刻汽车的位置坐标为
S2.3.3、根据信号消失前的经纬度坐标,实时定位得到载客车的经纬度坐标为
S3、获取车内语言交流信息,对车内的交流进行对话实时分析;
在Linux系统上实现声音鉴别,使用编写好的声卡驱动程序,通过图形用户界面调用声卡驱动程序来将收集到的声音信号进行录制,应用程序可以通过socket(套接字)发送或接收数据,通过socket将音频文件进行传输,在Ubuntu Linux环境下优化音频并改变文件格式,通过百度AI进行识别,识别结果开发板进行后续的处理控制。
本步骤具体的实现步骤可以为:
S3.1、音频采集时打开声卡,设置好采样频道数并量化位数,声卡设有编写好的声卡驱动程序;
S3.2、读取车内音频信号,调用声卡驱动程序将收集到的声音信号进行录制并存储;
S3.3、优化音频并改变文件格式,将音频文件传输至总控系统进行识别,得到识别结果并进行后续的处理控制,音频采集结束后关闭声卡。
S4、根据通过地基信号增强以及航迹推測算法获得的载客车如:“滴滴车”的精准定位信息,结合面部识别以及AI语音识别进行分析,实时估算载客过程中的危险系数,载客过程中的危险系数包括乘客危险系数和司机危险系数,本步骤中危险系数的判断方法具体步骤包括:
步骤4.1、根据实时获取的司机的面部识别信息,判断司机是否出现中途换人的情况;
步骤4.2、根据精确位置信息,判断载客车是否按照行驶在正常轨迹上,具体的是实时追踪车辆的轨迹,并与实际路线进行比较,在行驶路线出现问题时,后台远程锁停车辆并报警,很大程度上降低受害者的危险;
步骤4.3、根据获取的对话信息,语音识别判断司机与乘客的状态,具体的可以预设语音关键词如:抢劫、密码、信用卡、身份证号等,当识别到该类关键词后,再结合面部识别进行危险系数分析;
步骤4.4、根据面部识别信息,同时可以判断司机的面部表情及状态,从而判断司机是否处于危险环境,具体的可以预设司机正常行为状态,当检测到司机的行为与正常行为不符合时,通过语音播报进行提醒。
S5、根据载客过程中的危险系数判断是否要远程报警或者远程锁车。
当语音分析、路线判断出现问题时,后台控制车辆的锁定。先判断汽车的行驶状态,再通过北斗定位,智能的对汽车实施锁车操作从而避免远程锁车过程中发生事故,减少经济损失,远程锁车具体的实现步骤可以为:
S5.1、通过总控系统远程控制车载控制器限制载客车的行驶速度;
S5.2、将载客车的行驶速度降低后限制载客车前进组件的运作;
S5.3、前进组件限制发动机的启动能力,将行驶中的汽车逐步拉停。
与现有技术相比,该方法通过航迹推测与北斗导航组合进行载客车定位的方式实现行程比对,使得在北斗导航卫星信号受到影响时,如:载客车驶进地下车库、荒郊密林等地方无法获取定位信息时,可以通过航迹推算,借助车载里程传感器进行载客车实时定位,从而实现定位无死角,使载客车的位置实时处于监管范围内,实现高精度、高可靠性的载客车实时定位。同时辅以面部识别、语音识别方法对车内乘员进行实时监督,最终当乘客或司机发生或面临危险时,远程操控锁死载客车,并自动报警传递位置信息,从而保障乘客或司机的生命安全。该方法对司机和乘客起到极大的震慑作用,提高了犯罪成本,使乘客或司机的人身安全免遭侵害。
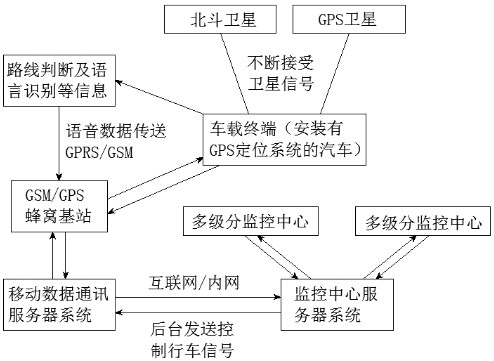
请一并参阅图1至图9,现对本发明提供的一种用于网约车的安全监测系 统的一种具体实施方式进行说明。该种用于网约车的安全监测系统包括车载 终端、监测装置、通讯装置和远程监控设备,其中车载终端设有行车控制器, 行车控制器用于控制车载终端的运行状态;监测装置设置于车载终端上、且 与北斗卫星电连接;通讯装置设置于车载终端上,分别与监测装置和车载终 端电连接;远程监控设备与通讯装置电连接、且设有航迹计算模块。
车载终端是网约车的本体,提供基本的出行服务;远程监控设备进行远程监控并处理接收信息及发送相应指令;监测装置与远程监控设备配合实现人员识别核查、位置锁定、航向监测、车内对话分析监督、远程锁车以及自动报警的功能;通讯装置进行指令的收发,实现监测装置、车载终端与远程监控设备之间的信息通讯;行车控制器通过通讯装置接收远程监控设备传输的指令信号实现行车制动。
在本实施例中,通讯控制模块靠近裝载机进行安装,这样便于直接发送信号给行车控制器。行车前的人员核查是最基础的安全保障;监测装置与远程监控设备配合组合导航算法实时检测到载客车的精确位置,当位置异常或车内乘客或司机遭遇危险时,远程监控设备自动报警并通过通讯装置控制行车控制器进行远程锁车。
在本实施例中,监测装置包括人脸识别模块、智能语音模块和定位模块,其中人脸识别模块设置于车载终端上,与通讯装置电连接;智能语音模块设置于车载终端上,与通讯装置电连接;定位模块设置于车载终端上,分别与北斗卫星和通讯装置电连接。智能语音模块对车内交流进行对话分析,从对话中获取信息,判断乘客是否安全,实现从各个方面保护乘客的乘车安全。智能语音模块通过Linux嵌入式板卡来实现语音识别的任务,是一个成本较低、识别率高、体积小的语音识别系统;通过人脸识别模块确认司机身份,保证乘客的安全,以人体特征为识别的对象准确度高,可以大大增加司机个人信息的可控性;定位模块用于获取车载终端的北斗卫星定位信息。
远程监控设备存储有面部识别所需的各项数据信息;人脸识别模块可以包括移动客户端和面部图像采集装置,用于获取司机的面部数据信息;行车控制器接收远程监控设备发送的识别结果信息,进而控制车锁的开启和保持关闭状态。该结构通过面部特征的识别,来控制汽车能否启动。
在本实施例中,行车控制器设有信息采集器,信息采集器用于收集车载终端行驶的转速信息、整车角度信息、行驶速度信息、底盘倾斜角度信息等状态信息。行车控制器通过阀控制器、铲斗控制阀、动臂控制阀、启动继电器、发动机的ECU实现所有的锁车操作。在此,只要能够实现上述行车控制器相关性能作用的均在本申请文件保护的范围之内。车载终端上的各个传感器、电磁阀都要由行车控制器控制。通过行车控制器对车载终端的运行状态进行监控,通讯模块将车载终端的信息传输至远程监控设备进行处理,结合北斗卫星提供的定位信息,远程监控设备对车载终端的车况了如指掌。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其它实施例的不同之处,各个实施例之间相同或相似部分互相参见即可。本发明实施例中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种用于网约车的安全监测方法及系统
- 一种用于网约车的安全监测系统以及方法