基于重心偏离度的隧洞点云配准方法、装置
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及地质测量领域,尤其涉及一种基于重心偏离度的隧洞点云配准方法、装置。
背景技术
全面、快速、准确地获取隧洞围岩的复杂地质信息,是分析评价隧洞稳定性和设计支护参数等工程问题的重要基础,是当前隧洞工程地质领域的重要研究内容。
在进行地质信息的获取时,可以采用多数据源融合,充分利用每种数据源优势,有利于隧洞地质信息的准确、高效获取,数据配准是实现多数据源融合的前提和关键。
然而隧洞围岩的自然特征形态多样,内部狭长且表面形状不规则,缺少用以标定参考尺度和方向的特征,因此隧洞难以识别,导致多源数据融合十分困难。
发明内容
发明目的:本发明旨在提供一种基于重心偏离度的隧洞点云配准方法、装置,采用重心偏离度,可以不依赖于配准对象的规则几何特征,且重心能够较好的表现隧洞地质岩体对象局部空间结构形态,在配准的效率和准确性方面都有较大程度的提高。
技术方案:本发明提供一种基于重心偏离度的隧洞点云配准方法,包括:
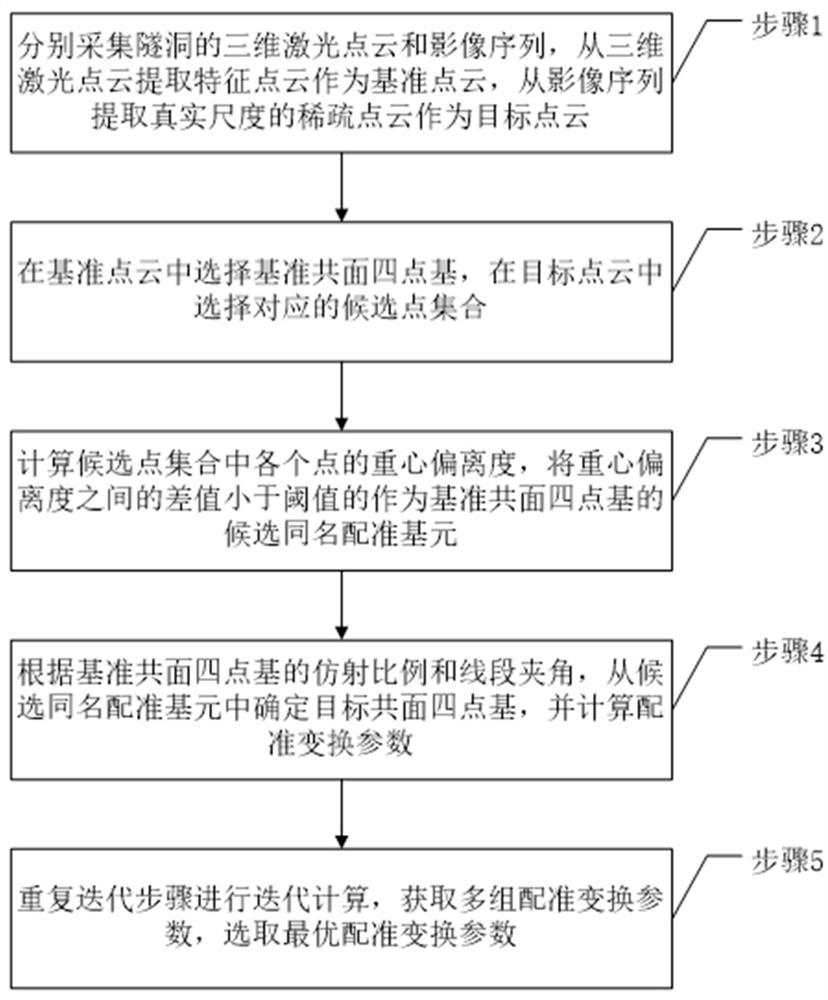
分别采集隧洞的三维激光点云和影像序列,从三维激光点云提取特征点云作为基准点云,从影像序列提取真实尺度的稀疏点云作为目标点云;
迭代步骤:在基准点云中选择基准共面四点基,在目标点云中选择对应的候选点集合;计算候选点集合中各个点的重心偏离度,将重心偏离度之间的差值小于阈值的作为基准共面四点基的候选同名配准基元;根据基准共面四点基的仿射比例和线段夹角,从候选同名配准基元中确定目标共面四点基,并计算配准变换参数;
重复迭代步骤进行迭代计算,获取多组配准变换参数,选取最优配准变换参数。
具体的,采用三维尺度不变特征转换从三维激光点云提取特征点云,基于运动恢复结构从影像序列提取稀疏点云,并依据隧洞中的真实刻度将稀疏点云的尺度转换为真实尺度。
具体的,在目标点云中提取与基准共面四点基的点对距离相等的候选点集合C
具体的,选取候选点集合中形成候选共面四点基的点对,以点作为球心,指定长度为半径,计算在球形邻域内存在的目标点云点集的重心坐标,与球心点空间坐标之间的偏移量。
具体的,将各点的重心偏离度彼此之间差值小于预定阈值的候选共面四点基,作为候选同名配准基元。
具体的,若候选同名配准基元与基准共面四点基存在以下关系,则认定仿射比例相同:
其中,λ
线段夹角,指共面四点基中两线段之间的夹角;
将仿射比例和线段夹角与基准共面四点基相等的候选同名配准基元,作为目标共面四点基。
具体的,采用RANSAC迭代算法进行计算,获取多组配准变换参数;
计算依据配准变换参数变换后的目标点云中的点,与基准点云中的点欧氏距离小于预定阈值的比例,选取比例最高的应用的配准变换参数作为最优配准变换参数。
具体的,采用ICP对最优配准变换参数进行精细配准。
本发明还提供一种基于重心偏离度的隧洞点云配准装置,包括:采集单元、迭代单元和比较单元,其中:
所述采集单元,用于分别采集隧洞的三维激光点云和影像序列,从三维激光点云提取特征点云作为基准点云,从影像序列提取真实尺度的稀疏点云作为目标点云;
所述迭代单元,用于在基准点云中选择基准共面四点基,在目标点云中选择对应的候选点集合;计算候选点集合中各个点的重心偏离度,将重心偏离度之间的差值小于阈值的作为基准共面四点基的候选同名配准基元;根据基准共面四点基的仿射比例和线段夹角,从候选同名配准基元中确定目标共面四点基,并计算配准变换参数;
所述比较单元,用于重复迭代步骤进行迭代计算,获取多组配准变换参数,选取最优配准变换参数。
具体的,所述迭代单元,用于在目标点云中提取与基准共面四点基的点对距离相 等的候选点集合C
选取候选点集合中形成候选共面四点基的点对,以点作为球心,指定长度为半径,计算在球形邻域内存在的目标点云点集的重心坐标,与球心点空间坐标之间的偏移量。
有益效果:与现有技术相比,本发明具有如下显著优点:采用重心偏离度,可以不依赖于配准对象(隧洞)的规则几何特征,且对具有不同维度及尺度的数据具有较好的适用性,更重要的是,由于重心能够较好的表现隧洞地质岩体对象局部空间结构形态,采用重心偏离度作为判别空间共面四点基是否为同名配准基元的条件,在配准的效率和准确性方面都有较大程度的提高。
附图说明
图1为本发明提供的基于重心偏离度的隧洞点云配准方法的流程示意图;
图2为本发明提供的基准点云示意图;
图3为本发明提供的目标点云示意图。
具体实施方式
下面结合附图对本发明的技术方案作进一步说明。
参阅图1,其为本发明提供的基于重心偏离度的隧洞点云配准方法的流程示意图,其中包括具体步骤。
步骤1,分别采集隧洞的三维激光点云和影像序列,从三维激光点云提取特征点云作为基准点云,从影像序列提取真实尺度的稀疏点云作为目标点云。
本发明实施例中,采用三维尺度不变特征转换(3D Scale-invariant featuretransform,3D SIFT)从三维激光点云提取特征点云,基于运动恢复结构(Structure fromMotion,SfM)提取影像序列对应的稀疏点云,并依据隧洞中的真实刻度将稀疏点云的尺度转换为真实尺度。
在具体实施中,可以在隧洞场景中分别放置不同长度标准的直尺作为参照物,根据隧洞场景中的直尺真实刻度与影像上的量测长度关系将稀疏点云模型转换为真实尺度。
在具体实施中,影像序列可以是二维光学数码影像序列,数码相机获取的光学影像含有丰富的纹理与光谱信息,TLS(Terrestrial Laser Scanning,地面激光扫描)三维点云具有高时间分辨率、高空间分辨率、测量精度均匀,将两者融合,可以优势互补,有利于隧洞地质信息的准确、高效获取,但在隧洞场景中,鲜有采用二维数据源与三维数据源进行融合的技术方案。
步骤2(迭代步骤),在基准点云中选择基准共面四点基,在目标点云中选择对应的候选点集合。
参阅图2和图3,分别为本发明提供的基准点云示意图和目标点云示意图。
本发明实施例中,在目标点云中提取与基准共面四点基的点对距离相等的候选点 集合C
在具体实施中,如图2或图3所示,是共面四点基,指由空间共面但不平行的两条线段的四个端点所构成的一组基,“点对”指共面四点基中相对应的两个点,在共面四点基中包括两个点对,点对连成的线段与另一点对连成的线段存在一个交点,而非是指线段延长线存在交点。
在具体实施中,在目标点云中的候选点集合包括两个点对的集合C
步骤3(迭代步骤),计算候选点集合中各个点的重心偏离度,将重心偏离度之间的差值小于阈值的作为基准共面四点基的候选同名配准基元。
本发明实施例中,选取候选点集合中形成候选共面四点基的点对,以点作为球心,指定长度R为半径,形成局部球形邻域,计算在球形邻域内存在的目标点云点集的重心坐标,与球心点空间坐标之间的偏移量。
本发明实施例中,将各点的重心偏离度彼此之间差值小于预定阈值的候选共面四点基,作为候选同名配准基元。
在具体实施中,因隧洞狭长圆柱形态特点,缺少规则特征信息,造成激光点云与影像点云在配准时易陷入局部最优的问题,导致配准困难。而采用重心偏离度,可以不依赖于配准对象(隧洞)的规则几何特征,且对具有不同维度及尺度的数据具有较好的适用性,更重要的是,由于重心能够较好的表现隧洞地质岩体对象局部空间结构形态,采用重心偏离度作为判别空间共面四点基是否为同名配准基元的条件,在配准的效率和准确性方面都有较大程度的提高。
在具体实施中,可以先从候选点集合中选取空间共面的点对,形成多组候选共面四点基。计算每一候选共面四点基中四个点的重心偏离度,重心偏离度是指待测点的局部球形邻域内点集的重心坐标,与待测点空间坐标之间的位置偏移量。
在具体实施中,在计算得到共面四点基中四个点的重心偏离度之后,四个点的重心偏离度若彼此之间的偏差均小于预定阈值(可以依据实际应用场景进行设定),则可以作为候选同名配准基元。
步骤4(迭代步骤),根据基准共面四点基的仿射比例和线段夹角,从候选同名配准基元中确定目标共面四点基,并计算配准变换参数。
本发明实施例中,若候选同名配准基元与基准共面四点基存在以下关系,则认定仿射比例相同:
其中,λ
线段夹角,指共面四点基中两线段之间的夹角;
将仿射比例和线段夹角与基准共面四点基相等的候选同名配准基元,作为目标共面四点基。
在具体实施中,‖x
在具体实施中,确定了基准共面四点基以及对应的目标共面四点基,即可以计算配准变换参数。
步骤5,重复迭代步骤进行迭代计算,获取多组配准变换参数,选取最优配准变换参数。
本发明实施例中,采用RANSAC(Random Sample Consensus,随机抽样一致算法)迭代算法进行计算,获取多组配准变换参数,在迭代计算中,可以在步骤2中重新选择基准共面四点基;
计算依据配准变换参数变换后的目标点云中的点,与基准点云中对应的点欧氏距离小于预定阈值的比例(与目标点云中所有点数量的比例),选取比例最高的(变换后的目标点云)应用的配准变换参数作为最优配准变换参数。
本发明实施例中,选取最优配准变换参数后,实现两种点云的粗配准;进一步采用ICP(Iterative Closest Point,最近迭代算法)对最优配准变换参数进行精细配准。
本发明还提供一种基于重心偏离度的隧洞点云配准装置,包括:采集单元、迭代单元和比较单元,其中:
所述采集单元,用于分别采集隧洞的三维激光点云和影像序列,从三维激光点云提取特征点云作为基准点云,从影像序列提取真实尺度的稀疏点云作为目标点云;
所述迭代单元,用于在基准点云中选择基准共面四点基,在目标点云中选择对应的候选点集合;计算候选点集合中各个点的重心偏离度,将重心偏离度之间的差值小于阈值的作为基准共面四点基的候选同名配准基元;根据基准共面四点基的仿射比例和线段夹角,从候选同名配准基元中确定目标共面四点基,并计算配准变换参数;
所述比较单元,用于重复迭代步骤进行迭代计算,获取多组配准变换参数,选取最优配准变换参数。
本发明实施例中,所述采集单元,用于采用三维尺度不变特征转换从三维激光点云提取特征点云,基于运动恢复结构从影像序列提取稀疏点云,并依据隧洞中的真实刻度将稀疏点云的尺度转换为真实尺度。
本发明实施例中,所述迭代单元,用于在目标点云中提取与基准共面四点基的点 对距离相等的候选点集合C
本发明实施例中,所述迭代单元,用于选取候选点集合中形成候选共面四点基的点对,以点作为球心,指定长度为半径,计算在球形邻域内存在的目标点云点集的重心坐标,与球心点空间坐标之间的偏移量。
本发明实施例中,所述迭代单元,用于将各点的重心偏离度彼此之间差值小于预定阈值的候选共面四点基,作为候选同名配准基元。
本发明实施例中,所述迭代单元,用于若候选同名配准基元与基准共面四点基存在以下关系,则认定仿射比例相同:
其中,λ
线段夹角,指共面四点基中两线段之间的夹角;
将仿射比例和线段夹角与基准共面四点基相等的候选同名配准基元,作为目标共面四点基。
本发明实施例中,所述比较单元,用于采用RANSAC迭代算法进行计算,获取多组配准变换参数;
计算依据配准变换参数变换后的目标点云中的点,与基准点云中的点欧氏距离小于预定阈值的比例,选取比例最高的应用的配准变换参数作为最优配准变换参数。
本发明实施例中,所述比较单元,还用于在选取最优配准变换参数之后,采用ICP对最优配准变换参数进行精细配准。
- 基于重心偏离度的隧洞点云配准方法、装置
- 基于重心偏离度的隧洞点云配准方法、装置