一种具有平衡缸结构的智能化机器人
文献发布时间:2023-06-19 10:13:22
技术领域
本发明属于机器人技术领域,具体涉及一种具有平衡缸结构的智能化机器人。
背景技术
随着市场上对工业机器人的需求不断加大,同时要求不断的提高,市场上的机器人负载重量越来越大,使用情景越来越多,现有的机器人体积笨重、安装复杂、精度低、效率不高、维护困难、安全性差,其中,最为代表的问题是,机器人在长时间使用后,驱动元件热量集中,传统装置的散热性能差,使得造价昂贵的机器人寿命较短。
发明内容
本发明的目的就在于为了解决上述问题而提供一种结构简单,设计合理的具有平衡缸结构的智能化机器人。
本发明通过以下技术方案来实现上述目的:
一种具有平衡缸结构的智能化机器人,包括固定底座,所述固定底座的上端活动连接有固定臂,所述固定臂的另一端活动连接有连接臂,所述连接臂的另一端活动连接有活动臂,所述活动臂的另一端活动连接有转动臂,所述转动臂的外表面活动连接有夹持臂,所述固定底座的内部设置有旋转驱动机,所述旋转驱动机驱动固定臂转动,所述固定臂的一侧外表面开设有一号仓,所述一号仓内连接有一号驱动机,所述一号驱动机的驱动端与所述连接臂连接,所述连接臂与活动臂之间连接有平衡缸,所述活动臂的外表面开设有二号仓,所述二号仓的内部连接有二号驱动机,所述二号驱动机的驱动端与所述连接臂连接,所述活动臂的内部连接有转动驱动机,所述转动驱动机的驱动端与转动臂连接,所述转动臂的外表面开设有三号仓,所述三号仓的内部连接有三号驱动机,所述三号驱动机的驱动端与所述夹持臂连接,所述一号仓、二号仓与三号仓的外表面均连接有盖板,所述盖板的内壁设置有水冷管,所述盖板的表面连接有气口与水冷口,所述水冷口的数量为两组,分别与外界的水冷系统连接,所述气口与外界的风冷系统连接。
作为本发明的进一步优化方案,所述夹持臂包括两组相向运动的夹杆,所述夹杆的一端固定连接有驱动杆,所述驱动杆的末端连接有不完全齿轮,两组所述不完全齿轮相互啮合,其中一组不完全齿轮连接有,所述夹杆的外表面还连接有夹持电机,所述夹持电机同样由盖板覆盖,所述夹杆的外表面还连接有辅助杆。
作为本发明的进一步优化方案,所述平衡缸包括缸体,所述缸体的两端分别连接有拉伸连接头、固定连接头,所述缸体的两端均固定连接有缸盖,所述固定连接头与缸体的缸盖外表面固定连接,所述拉伸连接头连接有拉杆件,所述拉杆件贯穿缸体的缸盖,插入于缸体的内部,所述缸体的内部设置有外置弹簧与内置弹簧,所述内置弹簧位于所述外置弹簧的内部,所述拉杆件贯穿内置弹簧连接有压缩板,所述缸体的内部还设置有顶板,所述外置弹簧与内置弹簧位于压缩板与顶板之间,所述拉伸连接头受力,拉动压缩板,使外置弹簧与内置弹簧向顶板压缩移动,所述顶板连接有连接杆,所述连接杆的另一端与缸体的缸盖连接。
作为本发明的进一步优化方案,所述缸体的端面固定连接有底块,所述底块的外表面连接有感应器。
作为本发明的进一步优化方案,所述固定连接头连接的缸盖包括外缸盖与内缸盖,所述外缸盖与固定连接头固定连接,所述内缸盖限定与缸体的内部,所述内缸盖可绕自身轴线转动,所述内缸盖与所述连接杆连接。
作为本发明的进一步优化方案,所述连接杆的两端均设置有活动球关节,所述连接杆通过活动球管件分别与内缸盖、顶板连接,所述压缩板的外表面开设有限位槽,所述内缸盖远离连接杆的一端固定连接有转动手柄,所述转动手柄贯穿外缸盖,所述外缸盖的外表面开设有转动槽体,所述转动手柄贯穿转动槽体,且位于转动槽体内滑动,所述转动手柄的外表面固定连接有压块,所述压块与外缸盖的表面贴合,转动所述转动手柄,内缸盖转动,带动连接杆扭转或复位,顶板上移或下移。
作为本发明的进一步优化方案,所述缸体的内表面开设有若干组纵向排列的卡槽,所述顶板的边缘外表面连接有卡块,所述顶板的内部开设有内滑槽,所述卡块可沿内滑槽滑出或收入,所述卡块滑出时卡入所述卡槽内;所述内滑槽的内部固定连接有限位块。
作为本发明的进一步优化方案,所述内滑槽固定连接有伸缩气囊,所述伸缩气囊的膨胀端与卡块固定连接,所述内滑槽内固定连接有弹簧件,通常状态下,所述弹簧件将卡块弹出内滑槽,所述伸缩气囊的气口连接有连接管,所述连接管穿出顶板,插入于连接杆内,通过连接杆插入于转动手柄内,所述转动手柄的端头固定连接有气阀件,所述气阀件与连接管连接。
作为本发明的进一步优化方案,所述顶板的中部固定连接有套管,所述套管的内部开设有槽体,所述拉杆件的外表面固定连接有限位凸块,所述限位凸块与槽体配合。
本发明的有益效果在于:本发明设置有多组活动的臂体,通过各臂体可以完成复杂的运动形式,同时,通过罩型盖板,连接水冷系统与风冷系统,从而可以有效的对各臂部的驱动机进行有效的降温,并且罩型盖板可以很好的为驱动机进行防护,防止过多的灰尘累积;还设置有平衡缸,该平衡缸设置有两组连接头,固定连接头与拉伸连接头相互配合,使得该平衡缸的两端均可以受力使用,便于平衡缸的安装,从而减轻固定缸体时,缸体的受到的损伤,增强该平衡缸的使用寿命,顶板连接有连接杆,通过顶板与连接杆配合,将原本作用在缸体两端盖的力,集中于一个缸盖处,通过提高该缸盖的强度情况,也减小提高整个缸体强度情况的成本;平衡缸内设置有外置弹簧与内置弹簧,用于辅助臂体活动使用,在使用前,可以通过气阀件,抽出伸缩气囊内的气体,将卡块从卡槽内抽出,通过转动手柄转动内缸盖,扭转连接杆,调节顶板的位置,实现平衡缸内的弹力调节;并且通过卡槽与卡块的配合,提高整个平衡缸的稳定性;整个装置结构简单,使用方便,内置的平衡缸的使用寿命长,便于推广使用。
附图说明
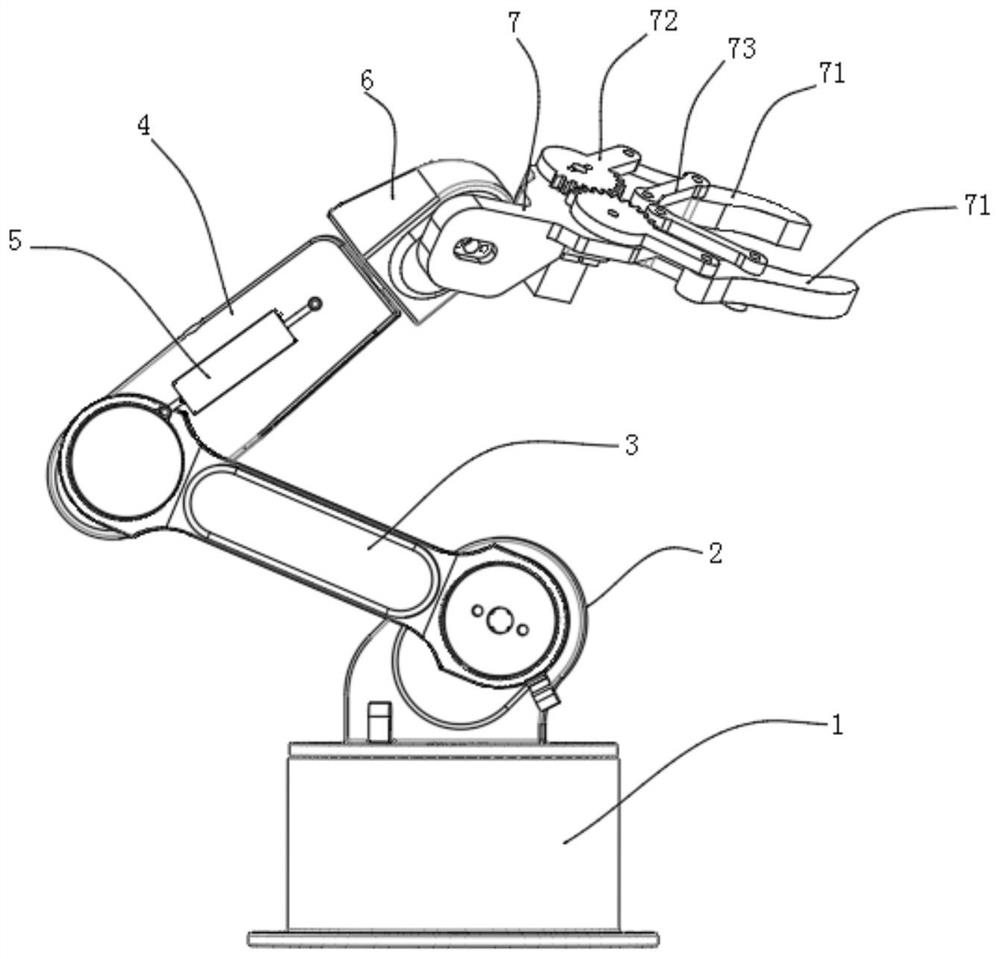
图1是本发明的整体结构示意图;
图2是本发明的图1的背面结构示意图;
图3是本发明盖板的结构示意图;
图4是本发明夹持臂的结构示意图;
图5是本发明夹持臂的另一视角的结构示意图;
图6是本发明的平衡缸的外部结构示意图;
图7是本发明的平衡缸的内部结构示意图;
图8是本发明的顶板的内部结构示意图。
图中:1、固定底座;2、固定臂;21、一号仓;22、一号驱动机;3、连接臂;4、活动臂;41、二号仓;42、二号驱动机;5、平衡缸;501、缸体;502、拉伸连接头;503、固定连接头;504、压块;505、气阀件;506、底块;507、感应器;508、外置弹簧;509、内置弹簧;510、连接杆;511、压缩板;512、内缸盖;513、顶板;514、套管;515、限位凸块;516、卡块;517、内滑槽;519、伸缩气囊;520、连接管;6、转动臂;61、三号仓;62、三号驱动机;7、夹持臂;71、夹杆;72、驱动杆;73、辅助杆;74、夹持电机;8、盖板;81、气口;82、水冷口。
具体实施方式
下面结合附图对本申请作进一步详细描述,有必要在此指出的是,以下具体实施方式只用于对本申请进行进一步的说明,不能理解为对本申请保护范围的限制,该领域的技术人员可以根据上述申请内容对本申请作出一些非本质的改进和调整。
实施例1
如图1-8所示,一种具有平衡缸结构的智能化机器人,包括固定底座1,所述固定底座1的上端活动连接有固定臂2,所述固定臂2的另一端活动连接有连接臂3,所述连接臂3的另一端活动连接有活动臂4,所述活动臂4的另一端活动连接有转动臂6,所述转动臂6的外表面活动连接有夹持臂7,所述固定底座1的内部设置有旋转驱动机,所述旋转驱动机驱动固定臂2转动,所述固定臂2的一侧外表面开设有一号仓21,所述一号仓21内连接有一号驱动机22,所述一号驱动机22的驱动端与所述连接臂3连接,所述连接臂3与活动臂4之间连接有平衡缸5,所述活动臂4的外表面开设有二号仓41,所述二号仓41的内部连接有二号驱动机42,所述二号驱动机42的驱动端与所述连接臂3连接,所述活动臂4的内部连接有转动驱动机,所述转动驱动机的驱动端与转动臂6连接,所述转动臂6的外表面开设有三号仓61,所述三号仓61的内部连接有三号驱动机62,所述三号驱动机62的驱动端与所述夹持臂7连接,所述一号仓21、二号仓41与三号仓61的外表面均连接有盖板8,所述盖板8的内壁设置有水冷管,水冷管环绕盖板8的内壁,呈盘旋状(图中未画出),所述盖板8的表面连接有气口81与水冷口82,所述水冷口82的数量为两组,分别与外界的水冷系统连接,所述气口81与外界的风冷系统连接。水冷系统与风冷系统运作,可以对仓内的驱动机进行有效的散热降温,十分实用,盖板8与该机器人的外表面的连接方式为可拆卸连接式,在不使用时,可以拆卸,具体的可拆卸形式,可以采用螺栓连接的方式,在连接处可以设置橡胶密封垫圈配合使用;
所述夹持臂7包括两组相向运动的夹杆71,所述夹杆71的一端固定连接有驱动杆72,所述驱动杆72的末端连接有不完全齿轮,两组所述不完全齿轮相互啮合,其中一组不完全齿轮连接有,所述夹杆71的外表面还连接有夹持电机74,所述夹持电机74同样由盖板8覆盖,所述夹杆71的外表面还连接有辅助杆72;通过夹持电机74驱动齿轮转动,从而使两夹杆71的端部相向移动,从而完成夹持;
所述平衡缸5包括缸体501,所述缸体501的两端分别连接有拉伸连接头502、固定连接头503,所述缸体501的两端均固定连接有缸盖,所述固定连接头503与缸体501的缸盖外表面固定连接,所述拉伸连接头502连接有拉杆件,所述拉杆件贯穿缸体501的缸盖,插入于缸体501的内部,所述缸体501的内部设置有外置弹簧508与内置弹簧509,所述内置弹簧509位于所述外置弹簧508的内部,所述拉杆件贯穿内置弹簧509连接有压缩板511,所述缸体501的内部还设置有顶板513,所述外置弹簧508与内置弹簧509位于压缩板511与顶板513之间,所述拉伸连接头502受力,拉动压缩板511,使外置弹簧508与内置弹簧509向顶板513压缩移动,所述顶板513连接有连接杆510,所述连接杆510的另一端与缸体501的缸盖连接;所述缸体501的端面固定连接有底块506,所述底块506的外表面连接有感应器507,感应器507可以采用压力感应器,也可以采用压触式开关配件,在本实施例中,当连接杆510失效后,顶板513与底块506接触,从而触发感应器507,通过感应器507可以进行报警(连接系统识别处理或连接报警器使用);
所述固定连接头503连接的缸盖包括外缸盖与内缸盖512,所述外缸盖与固定连接头503固定连接,所述内缸盖512限定与缸体501的内部,所述内缸盖512可绕自身轴线转动,所述内缸盖512与所述连接杆510连接。所述连接杆510的两端均设置有活动球关节,所述连接杆510通过活动球管件分别与内缸盖512、顶板513连接,所述压缩板511的外表面开设有限位槽,所述内缸盖512远离连接杆510的一端固定连接有转动手柄,所述转动手柄贯穿外缸盖,所述外缸盖的外表面开设有转动槽体,所述转动手柄贯穿转动槽体,且位于转动槽体内滑动,所述转动手柄的外表面固定连接有压块504,所述压块504与外缸盖的表面贴合,转动所述转动手柄,内缸盖512转动,带动连接杆510扭转或复位,顶板513上移或下移,通常状态下压块504的摩擦力可以有效的防止连接杆510复位,特殊情况下,可以增设加固件(如螺钉等,辅助固定使用);所述缸体501的内表面开设有若干组纵向排列的卡槽,所述顶板513的边缘外表面连接有卡块516,所述顶板513的内部开设有内滑槽517,所述卡块516可沿内滑槽517滑出或收入,所述卡块516滑出时卡入所述卡槽内;所述内滑槽517的内部固定连接有限位块;所述内滑槽517固定连接有伸缩气囊519,所述伸缩气囊519的膨胀端与卡块516固定连接,所述内滑槽517内固定连接有弹簧件,通常状态下,所述弹簧件将卡块516弹出内滑槽517,所述伸缩气囊519的气口连接有连接管520,所述连接管520穿出顶板513,插入于连接杆510内,通过连接杆510插入于转动手柄内,所述转动手柄的端头固定连接有气阀件505,所述气阀件505与连接管520连接。所述顶板513的中部固定连接有套管514,所述套管514的内部开设有槽体,所述拉杆件的外表面固定连接有限位凸块515,所述限位凸块515与槽体配合。
需要说明的是,该具有平衡缸结构的智能化机器人,在使用时,该装置可以通过各臂完成复杂的运动形式,同时,通过罩型盖板8,连接水冷系统与风冷系统,从而可以有效的对各臂部的驱动机进行有效的降温;还设置有平衡缸5,平衡缸5内设置有外置弹簧508与内置弹簧509,用于辅助臂体活动使用,在使用前,可以通过气阀件505,抽出伸缩气囊519内的气体,将卡块516从卡槽内抽出,通过转动手柄转动内缸盖,扭转连接杆510,调节顶板513的位置,实现平衡缸5内的弹力调节;整个装置结构简单,使用方便,内置的平衡缸5的使用寿命长,便于推广使用。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
- 一种具有平衡缸结构的智能化机器人
- 一种具有显示屏结构的智能化送货机器人