一种新型角度可调的铸件切割多功能机器人
文献发布时间:2023-06-19 10:21:15
技术领域
本发明属于切割设备技术领域,具体涉及一种新型角度可调的铸件切割多功能机器人。
背景技术
铸件是用各种铸造方法获得的金属成型物件,即把冶炼好的液态金属,用浇注、压射、吸入或其它浇铸方法注入预先准备好的铸型中,冷却后经打磨等后续加工手段后,所得到的具有一定形状,尺寸和性能的物件,铸件有多种分类方法:按其所用金属材料的不同,分为铸钢件、铸铁件、铸铜件、铸铝件、铸镁件、铸锌件、铸钛件等,而每类铸件又可按其化学成分或金相组织进一步分成不同的种类,而铝、镁、锌等有色金属铸件,多是压铸件。
目前,在铸件加工生产时需要使用到切割设备,但现有的切割机器人切割角度单一,仅能实现对铸件进行长短的切割作业,当需要对铸件进行切斜角时,普通的切割设备难以做到,且若需在铸件上切割斜面时,斜面的切割作业更加困难,手动切割斜面等精确度低,容易发生偏斜,导致铸件报废等,且现有的切割设备功能单一,使用上存在极大的弊端。
发明内容
本发明的目的在于提供一种新型角度可调的铸件切割多功能机器人,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种新型角度可调的铸件切割多功能机器人,包括底板,所述底板上固接有固定座,且固定座上转动连接有旋转座,所述固定座内安装有角度调节组件,所述旋转座内安装有夹持组件,所述底板还上固接有导轨座,且导轨座内嵌设有步进电机,所述步进电机的输出轴与直线丝杠的一端固接,所述直线丝杠的另一端通过丝杠轴承b转动连接在导轨座内,所述直线丝杠上螺旋传动连接有丝套a,且丝套a嵌设在导轨块内,所述导轨块滑动连接在导轨座上开设的导轨槽内,所述导轨块上固接有连接座,且连接座上固接有调节座,所述调节座的外侧壁呈环形开设有滑动槽,所述调节座内固设有转动调节组件,所述调节座的外侧通过转动调节组件连接有固定板,所述固定板上安装有电动机,且电动机的输出轴上固接有主动轮,所述主动轮通过皮带与从动轮传动连接,所述从动轮上安装有切割片,所述从动轮和切割片均通过转动轴转动连接在固定板的侧壁上,所述固定板上固设有防护组件,且防护组件包覆在切割片的外侧。
方案中需要说明的是:
步进电机、伺服电机和电动机均为现有技术的常用部件,采用的型号等均可根据实际使用需求定制。
作为一种优选的实施方式,所述固定座上表面靠近边缘的位置处设有角度刻度,旋转座的外侧壁对应角度刻度的位置处固设有指针。
作为一种优选的实施方式,所述导轨块滑动连接在导向杆上,且两个导向杆均固接在导轨槽内。
作为一种优选的实施方式,所述角度调节组件包括转动连接在固定座外侧壁上的转柄a,且转柄b的一端上固接有锥齿轮a,锥齿轮a与锥齿轮b相啮合,锥齿轮b与蜗杆轴的一端固接,蜗杆轴转动连接在固定座内,蜗杆轴还与蜗轮齿环相啮合,且蜗轮齿环固接在旋转座位于固定座内部的外侧壁上。
作为一种优选的实施方式,所述夹持组件包括转动连接在旋转座外侧壁上的转柄b,且转柄b的一端与双向丝杠的一端固接,双向丝杠的中端处通过丝杠轴承a转动连接在旋转座内,双向丝杠上螺旋传动连接有两个丝套a,且两个丝套a分别嵌设在两个移动块内,且两个移动块分别穿过旋转座上开设的两个通孔并固接有夹持块,且两个夹持块的相对面上均设有防滑纹。
作为一种优选的实施方式,所述转动调节组件包括安装在调节座内部的伺服电机,且伺服电机的输出轴上固接有齿盘,调节座内转动连接有转动环,且转动环的外侧壁上固接有滑动块,滑动块与固定板固接,转动环的内侧壁上固接有双面齿牙的内齿环,内齿环的两侧面分别与四个柱齿轮a相啮合,且四个柱齿轮a均通过连接轴固接有柱齿轮b,连接轴通过轴承套转动连接在支撑板上,支撑板固接在调节座内,且四个柱齿轮b两两为一组并相互啮合,且两组柱齿轮b均与齿盘相啮合。
作为一种优选的实施方式,所述滑动块的两侧壁上均开设有限位槽,且滑动块通过限位槽限位滑动连接在滑动槽内。
作为一种优选的实施方式,所述防护组件包括通过连接块固接在固定板上的固定环,且固定环的一侧壁开设有内滑槽,内滑槽内通过弹簧弹性连接有内滑块,且内滑块滑动连接在内滑槽中,内滑块与防护罩的一侧壁固接,防护罩罩设在切割片的外侧。
作为一种优选的实施方式,所述防护罩底端的两侧壁上均固接有滚轮。
作为一种优选的实施方式,所述底板倾斜安装有导料板,且导料板的内侧嵌设有网板。
与现有技术相比,本发明提供的新型角度可调的铸件切割多功能机器人,至少包括如下有益效果:
(1)通过角度调节组件的设置,转动转柄a带动锥齿轮a旋转,利用锥齿轮a和锥齿轮b的啮合作用带动蜗杆轴旋转,蜗杆轴旋转带动蜗轮齿环旋转,进而使得旋转座旋转,通过指针和角度刻度的作用,从而可准确控制铸件的安装角度,便于切割任意斜角;
(2)通过转动调节组件的设置,启动伺服电机工作并带动齿盘旋转,利用齿盘、柱齿轮b、连接轴和柱齿轮a的联动作用带动内齿环旋转,内齿环旋转带动转动环旋转,从而带动滑动块在调节座上滑动槽内移动,以此来实现切割片的斜面切割功能,且切割片的倾斜角度可任意调节,能做到对铸件任意角度的斜面切割作业,切割作业准确,提高铸件切割作业的良品率;
(3)通过防护组件的设置,在切割作业时,切割片逐渐靠近铸件,当滚轮与铸件接触时,从而滚轮可顺利在铸件上移动,确保防护罩可对切割片进行防护,避免操作失误引发安全隐患,同时在弹簧与内滑块的作用下,可旋转防护罩,从而以适用不同厚度的铸件切割作业,防护性强,安全性高;
(4)经切割后的铸件余料会落到导料板上,顺着导料板落下,便于对余料的收集,同时在切割作业中会使用到冷却液,当冷却液落下顺着导料板流动时,在网板的作用下,落到网板的下方,便于回收冷却液,更加节能环保。
附图说明
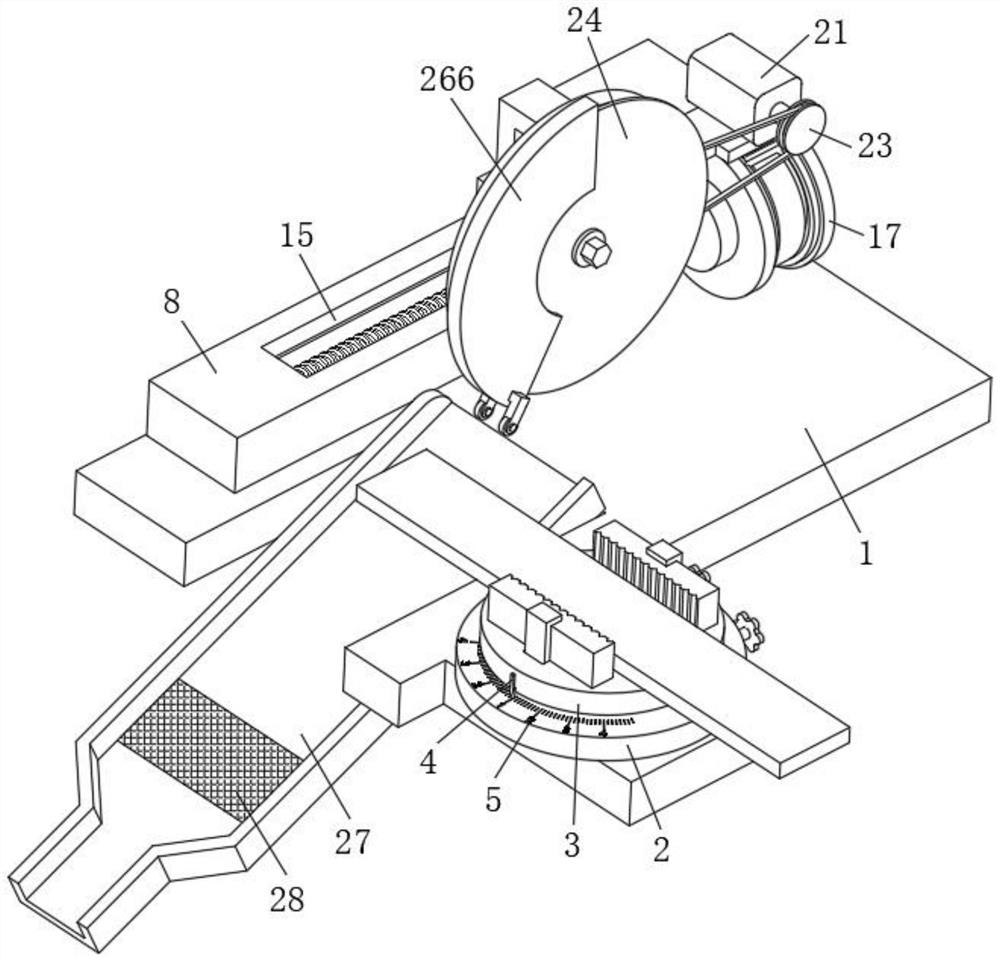
图1为本发明的结构示意图;
图2为本发明侧视的结构示意图;
图3为本发明固定座与旋转座剖视处的结构示意图;
图4为本发明防护组件的结构示意图;
图5为本发明调节座剖视后其内部的结构示意图;
图6为本发明导轨座内部部件的结构示意图。
图中:1、底板;2、固定座;3、旋转座;4、指针;5、角度刻度;6、角度调节组件;61、转柄a;62、锥齿轮a;63、锥齿轮b;64、蜗杆轴;65、蜗轮齿环;7、夹持组件;71、转柄b;72、双向丝杠;73、丝杠轴承a;74、丝套a;75、移动块;76、通孔;77、夹持块;8、导轨座;9、步进电机;10、直线丝杠;11、丝杠轴承b;12、丝套b;13、导轨块;14、导向杆;15、导轨槽;16、连接座;17、调节座;18、滑动槽;19、转动调节组件;191、伺服电机;192、齿盘;193、滑动块;1931、限位槽;194、转动环;195、内齿环;196、柱齿轮a;197、连接轴;1971、轴承套;1972、支撑板;198、柱齿轮b;20、固定板;21、电动机;22、主动轮;23、从动轮;24、切割片;25、转动轴;26、防护组件;261、连接块;262、固定环;263、内滑块;264、内滑槽;265、弹簧;266、防护罩;267、滚轮;27、导料板;28、网板。
具体实施方式
下面结合实施例对本发明做进一步的描述。
以下实施例用于说明本发明,但不能用来限制本发明的保护范围。实施例中的条件可以根据具体条件做进一步的调整,在本发明的构思前提下对本发明的方法简单改进都属于本发明要求保护的范围。
请参阅图1-6,本发明提供一种新型角度可调的铸件切割多功能机器人,包括底板1,底板1上固接有固定座2,且固定座2上转动连接有旋转座3,固定座2上表面靠近边缘的位置处设有角度刻度5,旋转座3的外侧壁对应角度刻度5的位置处固设有指针4(见图1和图2);可准确控制铸件的安装角度,便于切割任意斜角。
固定座2内安装有角度调节组件6,角度调节组件6包括转动连接在固定座2外侧壁上的转柄a61,且转柄b71的一端上固接有锥齿轮a62,锥齿轮a62与锥齿轮b63相啮合,锥齿轮b63与蜗杆轴64的一端固接,蜗杆轴64转动连接在固定座2内,蜗杆轴64还与蜗轮齿环65相啮合,且蜗轮齿环65固接在旋转座3位于固定座2内部的外侧壁上(见图1、图2和图3);转动转柄a61带动锥齿轮a62旋转,利用锥齿轮a62和锥齿轮b63的啮合作用带动蜗杆轴64旋转,蜗杆轴64旋转带动蜗轮齿环65旋转,进而使得旋转座3旋转,便于改变铸件的安装角度。
旋转座3内安装有夹持组件7,夹持组件7包括转动连接在旋转座3外侧壁上的转柄b71,且转柄b71的一端与双向丝杠72的一端固接,双向丝杠72的中端处通过丝杠轴承a73转动连接在旋转座3内,双向丝杠72上螺旋传动连接有两个丝套a74,且两个丝套a74分别嵌设在两个移动块75内,且两个移动块75分别穿过旋转座3上开设的两个通孔76并固接有夹持块77,且两个夹持块77的相对面上均设有防滑纹(见图1、图2和图3);转动转柄b71带动双向丝杠72旋转,在两个丝套a74的作用使两个移动块75带动两个夹持块77相互靠近,从而将铸件夹紧,确保铸件在切割工作时不易晃动,同时防滑纹的设置可提高夹持块77的防滑性,避免铸件滑动。
底板1还上固接有导轨座8,且导轨座8内嵌设有步进电机9,步进电机9的输出轴与直线丝杠10的一端固接,直线丝杠10的另一端通过丝杠轴承b11转动连接在导轨座8内,直线丝杠10上螺旋传动连接有丝套a74,且丝套a74嵌设在导轨块13内,导轨块13滑动连接在导轨座8上开设的导轨槽15内,导轨块13滑动连接在导向杆14上,且两个导向杆14均固接在导轨槽15内(见图6);在导向杆14的导向作用下,使导轨块13在移动时更加稳定。
导轨块13上固接有连接座16,且连接座16上固接有调节座17,调节座17的外侧壁呈环形开设有滑动槽18,调节座17内固设有转动调节组件19,转动调节组件19包括安装在调节座17内部的伺服电机191,且伺服电机191的输出轴上固接有齿盘192,调节座17内转动连接有转动环194,且转动环194的外侧壁上固接有滑动块193,滑动块193与固定板20固接,转动环194的内侧壁上固接有双面齿牙的内齿环195,内齿环195的两侧面分别与四个柱齿轮a196相啮合,且四个柱齿轮a196均通过连接轴197固接有柱齿轮b198,连接轴197通过轴承套1971转动连接在支撑板1972上,支撑板1972固接在调节座17内,且四个柱齿轮b198两两为一组并相互啮合,且两组柱齿轮b198均与齿盘192相啮合(见图1、图2和图5);启动伺服电机191工作并带动齿盘192旋转,利用齿盘192、柱齿轮b198、连接轴197和柱齿轮a196的联动作用带动内齿环195旋转,内齿环195旋转带动转动环194旋转,从而带动滑动块193在调节座17上滑动槽18内移动,以此来实现切割片24的斜面切割功能,且切割片24的倾斜角度可任意调节,能做到对铸件任意角度的斜面切割作业,切割作业准确,提高铸件切割作业的良品率。
滑动块193的两侧壁上均开设有限位槽1931,且滑动块193通过限位槽1931限位滑动连接在滑动槽18内(见图5);确保滑动块193可更加稳定的在滑动槽18内滑动。
调节座17的外侧通过转动调节组件19连接有固定板20,固定板20上安装有电动机21,且电动机21的输出轴上固接有主动轮22,主动轮22通过皮带与从动轮23传动连接,从动轮23上安装有切割片24,从动轮23和切割片24均通过转动轴25转动连接在固定板20的侧壁上,固定板20上固设有防护组件26,且防护组件26包覆在切割片24的外侧,防护组件26包括通过连接块261固接在固定板20上的固定环262,且固定环262的一侧壁开设有内滑槽264,内滑槽264内通过弹簧265弹性连接有内滑块263,且内滑块263滑动连接在内滑槽264中,内滑块263与防护罩266的一侧壁固接,防护罩266罩设在切割片24的外侧(见图1、图2和图4);确保防护罩266可对切割片24进行防护,避免操作失误引发安全隐患,同时在弹簧265与内滑块263的作用下,可旋转防护罩266,从而以适用不同厚度的铸件切割作业,防护性强,安全性高。
防护罩266底端的两侧壁上均固接有滚轮267(见图1和图2);当滚轮267与铸件接触时,从而滚轮267可顺利在铸件上移动,。
底板1倾斜安装有导料板27,且导料板27的内侧嵌设有网板28(见图1和图2);经切割后的铸件余料会落到导料板27上,顺着导料板27落下,便于对余料的收集,同时在切割作业中会使用到冷却液,当冷却液落下顺着导料板27流动时,在网板28的作用下,落到网板28的下方,便于回收冷却液,更加节能环保。
在使用时,将铸件放置于两个夹持块77之间,转动转柄b71带动双向丝杠72旋转,在两个丝套a74的作用使两个移动块75带动两个夹持块77相互靠近,从而将铸件夹紧,确保铸件在切割工作时不易晃动,再转动转柄a61带动锥齿轮a62旋转,利用锥齿轮a62和锥齿轮b63的啮合作用带动蜗杆轴64旋转,蜗杆轴64旋转带动蜗轮齿环65旋转,进而使得旋转座3旋转,通过指针4和角度刻度5的作用,从而可准确控制铸件的安装角度,便于切割任意斜角,铸件安装完毕后,启动伺服电机191工作并带动齿盘192旋转,利用齿盘192、柱齿轮b198、连接轴197和柱齿轮a196的联动作用带动内齿环195旋转,内齿环195旋转带动转动环194旋转,从而带动滑动块193在调节座17上滑动槽18内移动,以此来实现切割片24的斜面切割功能,且切割片24的倾斜角度可任意调节,能做到对铸件任意角度的斜面切割作业,切割作业准确,启动电动机21并通过主动轮22带动从动轮23旋转,从而使切割片24旋转,启动步进电机9工作并带动直线丝杠10旋转,在丝套b12的作用下使导轨块13移动,从而使切割片24逐渐靠近铸件,当滚轮267与铸件接触时,从而滚轮267可顺利在铸件上移动,确保防护罩266可对切割片24进行防护,避免操作失误引发安全隐患,同时在弹簧265与内滑块263的作用下,可旋转防护罩266,从而以适用不同厚度的铸件切割作业,防护性强,安全性高,经切割后的铸件余料会落到导料板27上,顺着导料板27落下,便于对余料的收集,同时在切割作业中会使用到冷却液,当冷却液落下顺着导料板27流动时,在网板28的作用下,落到网板28的下方,便于回收冷却液,更加节能环保。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种新型角度可调的铸件切割多功能机器人
- 一种角度可调的铸件用多功能切割装置