数据丢失和信道噪声干扰下的ILC系统输入信号滤波方法
文献发布时间:2023-06-19 10:32:14
技术领域
本发明属于信号处理技术领域,涉及的是一种无线网络通信环境下测量信号和输入信号同时存在随机数据丢失和加性信道噪声干扰时的保障迭代学习控制系统收敛性的输入信号最优滤波方法。
背景技术
近些年来,随着网络通信技术的发展,网络控制系统得到了科研工作者的广泛关注。对于网络控制系统而言,其控制器需要借助于一定的通信网络完成与传感器以及执行器的信息交互,尤其是无线通信网络的使用,不仅使系统具有一般网络控制系统的优点,还实现了控制器和系统平台的分离,使用方式更为灵活多样。但是,无线通信网络的使用也给系统控制性能的保障带来了诸多新的挑战,例如系统的测量信号和输入信号在无线传输的过程中既会发生随机丢失,也会受到加性信道噪声的干扰,从而影响系统的控制性能。
在网络控制系统的分析与设计中,控制器的控制策略是另一个需要考虑的问题。当受控系统具有重复运动特性时,系统控制器采用迭代学习控制(Iterative LearningControl,ILC)这一种简单且有效的策略。但是,在无线网络通信环境下,迭代学习控制的效果会受到数据丢失和信道噪声的干扰,进而不能实现对期望轨迹的精确跟踪。
需要指出的是,通信约束条件下的网络控制系统的研究一直是相关领域的热点之一,且提出了多种最优滤波方法。但是,这些方法的提出并不是针对控制器采用ILC策略的系统提出的,无法直接用来处理数据丢失和信道噪声对ILC系统收敛性能的影响。
发明内容
针对上述背景技术中存在的不足,本发明提出了一种数据丢失和信道噪声干扰下的ILC系统输入信号滤波方法,解决了现有技术中不能用来处理数据丢失和信道噪声下的采用迭代学习控制的网络控制系统收敛性保障的技术问题。
本发明的技术方案是这样实现的:
一种数据丢失和信道噪声干扰下的ILC系统输入信号滤波方法,其步骤如下:
步骤一:利用控制器端输入信号的迭代学习过程以及包含数据丢失和信道噪声干扰的测量信号和输入信号的无线传输过程作为滤波估计模型的状态更新方程,以输入信号的无线传输过程作为滤波估计模型的状态测量方程,并利用状态更新方程和状态测量方程建立滤波估计模型;
步骤二:根据正交投影准则和滤波估计模型的系统参数计算滤波估计模型的新息和新息协方差;
步骤三:根据步骤二的滤波估计模型的新息和新息协方差获得滤波估计模型的预测增益;
步骤四:根据正交投影准则和滤波估计模型的预测增益计算状态预测值和状态预测误差的方差值;
步骤五:根据步骤二的滤波估计模型的新息和新息协方差获得滤波估计模型的滤波增益;
步骤六:根据步骤四中的状态预测值、状态预测误差的方差值和步骤五中的滤波增益计算滤波后的状态估计值和状态估计误差的方差值。
ILC系统的比例ILC型策略为:
u
其中,u
计算控制器接收到的测量信号
其中,ξ
定义随机参数
其中,
根据输入信号和测量信号无线传输过程中叠加的信道噪声的统计特征,可知
根据输入信号和测量信号无线传输过程中发生的随机丢失的统计特征,可知E{ξ
滤波模型的系统参数的均值和误差可表示为:
滤波估计模型中状态的二阶原点矩q
其中,M
所述根据正交投影准则和滤波估计模型的系统参数计算滤波估计模型的新息和新息协方差的方法为:
其中,ε
将公式(5)的等式两边投影到由(
定义状态预测误差值
根据新息的表达式计算新息的自协方差:
所述滤波估计模型的预测增益L
所述状态预测值和状态预测误差的方差值的获得方法为:
根据正交投影准则,可得状态预测值
将式(4)两边投影到扩张后的线性空间,可得:
将
根据预测状态误差计算预测状态误差的自协方差矩阵P
其中:
所述滤波估计模型的滤波增益为:
其中,K
所述滤波后的状态估计值和状态估计误差的方差值的获得方法为:
根据正交投影准则,可得状态估计值
根据式(17),状态估计误差
因此,状态估计误差的方差值P
其中,P
本技术方案能产生的有益效果:本发明首先利用控制器端输入信号的迭代学习过程,测量信号和输入信号的传输过程进行扩张,作为用于输入信号最优滤波的状态更新方程,用输入信号的传输过程作为输入信号最优滤波的状态测量方程,从而构建出包含数据丢失和信道噪声干扰的输入信号最优滤波模型。利用该模型和正交投影准则,在执行器端对输入信号进行迭代域滤波估计,并以滤波后的输入信号驱动系统的执行器,从而保障存在数据丢失和信道噪声干扰时的ILC系统收敛性能。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为无线网络通信条件下的ILC系统框图。
图2为包含输入信号滤波器的无线网络ILC系统框图。
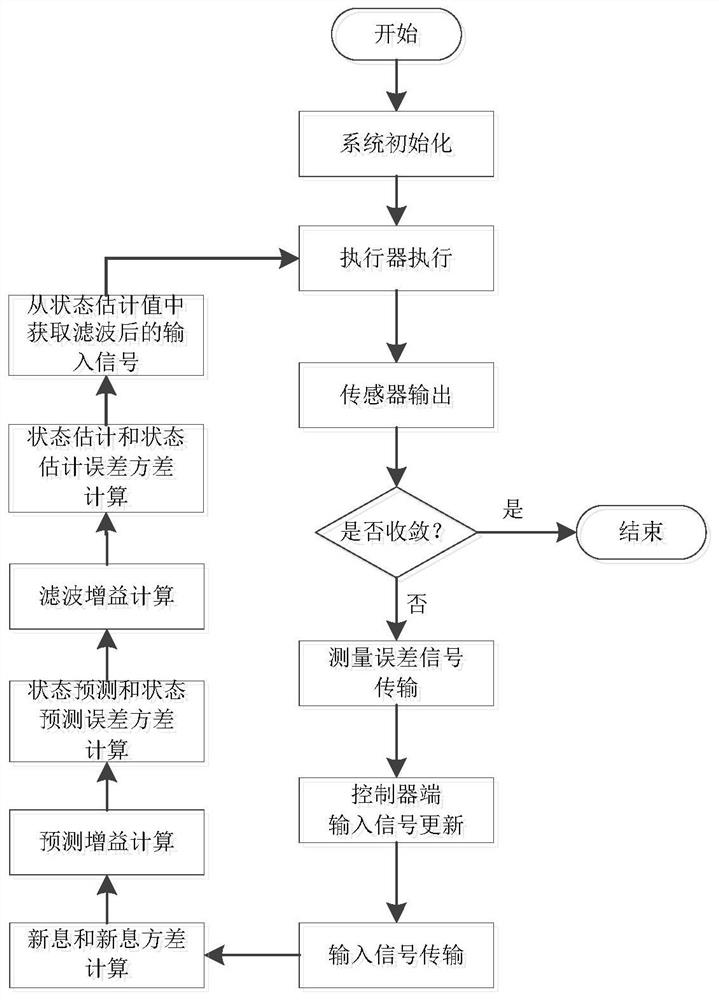
图3为本发明的流程图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图3所示,本发明实施例提供了一种针对信号随机丢失和信道噪声干扰的ILC系统输入信号最优滤波方法,首先利用输入信号的迭代学习过程和包含数据丢失和信道噪声干扰的测量信号和输入信号的无线传输过程,构建用于在执行器端对输入信号进行迭代域滤波的系统模型,在此基础上,依据正交投影准则,获得基于线性最小方差的滤波器,在迭代域内实现对滤波模型中包含数据丢失和信道噪声干扰的输入信号的最优滤波。具体步骤如下:
步骤一:利用控制器端输入信号的迭代学习过程以及包含数据丢失和信道噪声干扰的测量信号和输入信号的无线传输过程作为滤波估计模型的状态更新方程,以输入信号的无线传输过程作为滤波估计模型的状态测量方程,并利用状态更新方程和状态测量方程建立滤波估计模型;
如图1所示,无线网络通信条件下采用迭代学习控制器的系统框图,首先考虑系统采用如下一类比例型学习策略的迭代学习控制器:
u
其中,u
在无线网络通信条件下,迭代学习控制器进行输入信号更新所使用的测量信号需要通过传感器到控制器间的无线信道进行传输,控制器利用接收到的测量信号更新产生系统下次运行所需的输入信号,并将更新的输入信号通过控制器与执行器间的无线信道传输到执行器,从而构成闭合的控制回路。凭借引入的无线通信网络,迭代学习控制器和系统平台实现了分离,从而使得此类迭代学习控制系统具备了易于维护、布线等优点。但是,无线通信网络的不可靠性也给系统的控制性能保障带来了一些新的挑战。例如,测量信号和输入信号在通过无线信道传输的过程中,不仅会发生随机丢失,而且会叠加上信道噪声,此时,控制器接收到的测量信号
其中,ξ
显然,在数据丢失和信道噪声的干扰下,
为了保证数据丢失和信道噪声干扰下的迭代学习控制系统的性能,考虑在执行器端设计一个输入信号滤波器,对输入信号进行滤波估计,如图2所示。利用控制器端输入信号的迭代学习过程以及包含数据丢失和信道噪声干扰的测量信号和输入信号的无线传输过程作为滤波估计模型的状态更新方程,以输入信号的无线传输过程作为滤波估计模型的状态测量方程,并利用状态更新方程和状态测量方程建立滤波估计模型。定义随机参数
其中,
根据输入信号和测量信号无线传输过程中叠加的信道噪声的统计特征,可知
滤波估计模型的系统参数的均值和误差可表示为:
滤波估计模型中状态的二阶原点矩q
其中,M
步骤二:根据正交投影准则和滤波估计模型的系统参数计算滤波估计模型的新息和新息协方差;
其中,ε
将公式(5)的等式两边投影到由(
定义状态预测误差值为
根据新息的表达式计算新息的自协方差:
步骤三:根据步骤二的滤波估计模型的新息和新息协方差获得滤波估计模型的预测增益L
步骤四:根据正交投影准则,获得状态预测表达式,依据状态表预测达式进一步推导获得状态预测误差和状态预测误差方差的表达式,并利用步骤三得到的预测增益计算出状态预测值和状态预测误差方差值。
根据正交投影准则,可得状态预测值
将式(4)两边投影到扩张后的线性空间,可得:
将
根据预测状态误差计算预测状态误差的自协方差矩阵P
其中:
步骤五:根据步骤二的滤波估计模型的新息和新息协方差获得滤波估计模型的滤波增益;所述滤波估计模型的滤波增益为:
其中,K
步骤六:根据正交投影准则,获得状态估计表达式,然后利用该表达式进一步推导获得状态估计误差和状态估计误差方差的表达式,并根据步骤五步得到的滤波增益以及步骤四获得的状态预测值和状态预测误差方差值,计算出滤波后的状态估计值和状态估计误差方差值。
根据正交投影准则,可得状态估计值
根据式(17),状态估计误差
因此,状态估计误差的方差值P
其中,P
通过上述六个步骤,即可在迭代域内完成对滤波模型状态向量的估计。该估计获得的状态向量的第一个元素即为估计获得的输入信号,将其作用于迭代学习控制系统的执行器,即可在测量信号和输入信号无线传输受到数据丢失和信道噪声干扰的情况下,保障系统输出对期望轨迹跟踪的精确性。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 数据丢失和信道噪声干扰下的ILC系统输入信号滤波方法
- 一种噪声信道下的迭代学习控制系统输入信号估计方法