一种基于模型自训练的地基云图像云检测方法
文献发布时间:2023-06-19 10:38:35
技术领域
本发明涉及图像处理技术领域,尤其涉及一种基于模型自训练的地基云图像云检测方法。
背景技术
图像处理是一种采用计算机对图像进行分析,以达到所需结果的技术。目前地基云图像云检测方法多采用无监督学习的图像分割算法以及基于监督学习的云检测方法,通过将地基云图像分割问题转化为图像局部区域的二分类问题。其中,基于监督学习的云检测方法主要分为两类,一类是基于传统机器学习模型,例如先将地基云图像划分为若干个很小的局部(一般称之为超像素),再对这些小的局部进行特征提取,以这些超像素为样本数据或者分类预测的对象,通过样本来训练模型,最后用训练好的模型对要分析的地基云图像进行局部的二分类;另一类是基于深度学习模型,例如直接设计一个复杂的卷积神经网络,通过大量的标注数据对该卷积神经网络进行训练,由该网络模型对预测图像直接进行分析,得到检测分割之后的结果。
然而,上述无监督学习的分割算法虽然速度较快,但是其对图像成像环境及成像质量的适应性较差。在实际的地基云观测过程中,因为时间、地理位置、气候环境等各种原因造成的地基云图像的视觉差异非常复杂,无监督的分割算法所使用的特征往往较为简单,表征能力有限、鲁棒性弱,因此其结果特别不稳定;而监督学习的方法,普遍需要大量的标注样本,尤其是基于深度学习模型的,由于模型参数量巨大,对样本数量要求非常高,在实际过程中,样本的标注非常耗时耗力,成本太高。同时由于不同地理位置的气候特点、空气质量等环境均不同,且会随着时间年代的推移发生变化,因此,当外部条件发生变化,为了更好地模型预测效果,使用当地或当时的真实观测图像进行重训练几乎是无法避免的,而标注的需求量大给这样的模型优化训练工作带来了极大的成本和阻碍。
上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
发明内容
本发明的主要目的在于提供了一种基于模型自训练的地基云图像云检测方法,旨在提供一种地基云图像云检测的鲁棒性和适应性强,且对标注样本的需求少的地基云图像云检测方法。
为实现上述目的,本发明提供了一种地基云图像分类模型的训练方法,包括:
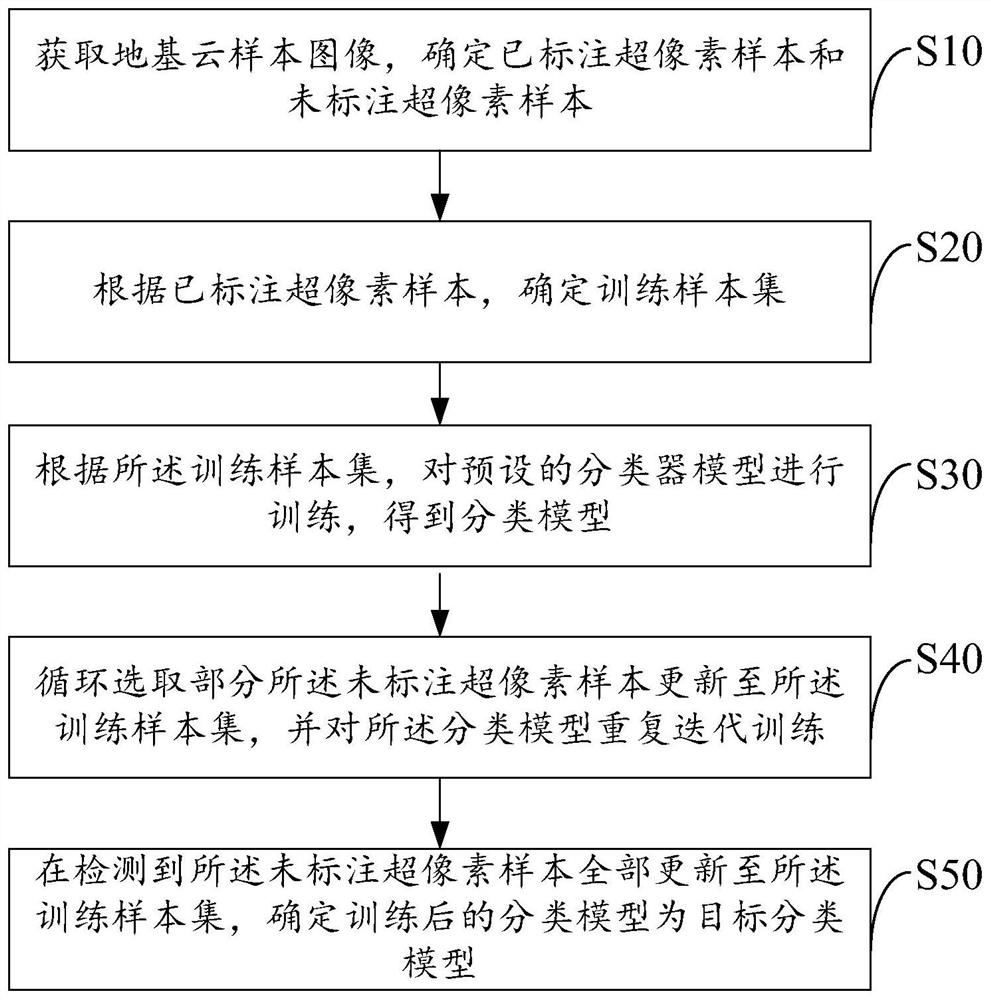
获取地基云样本图像,确定已标注超像素样本和未标注超像素样本;
根据已标注超像素样本,确定训练样本集;
根据所述训练样本集,对预设的分类器模型进行训练,得到分类模型;
循环选取部分所述未标注超像素样本更新至所述训练样本集,并对所述分类模型重复迭代训练;
在检测到所述未标注超像素样本全部更新至所述训练样本集,确定训练后的分类模型为目标分类模型。
优选地,所述根据所述训练样本集,对预设的分类器模型进行训练,得到分类模型的步骤之后,所述循环选取部分所述未标注超像素样本更新至所述训练样本集,并对所述分类模型重复迭代训练的步骤之前,还包括:
确定所述未标注超像素样本的伪标签及其置信度;
相应地,所述循环选取部分所述未标注超像素样本更新至所述训练样本集,并对所述分类模型重复迭代训练的步骤,具体包括:
根据所述未标注超像素样本的伪标签及其置信度,循环选取部分所述未标注超像素样本更新至所述训练样本集,并对所述分类模型重复迭代训练。
优选地,所述确定所述未标注超像素样本的伪标签及其置信度的步骤,包括:
计算所述未标注超像素样本所在地基云样本图像的红蓝比值Otsu阈值;
利用红蓝比值Otsu阈值对所述未标注超像素样本预测,得到预测值St;
根据所述分类模型,对所述未标注超像素样本进行类别预测,得到类别预测值Sc;
比较类别预测值Sc与预测值St;
根据比较结果,确定所述未标注超像素样本的伪标签及其置信度。
优选地,所述根据所述未标注超像素样本的伪标签及其置信度,循环选取部分所述未标注超像素样本更新至所述训练样本集,并对所述分类模型重复迭代训练的步骤,具体包括:
根据所述未标注超像素样本的伪标签对应的置信度,对所述未标注超像素样本进行排序;
根据排序后的未标注超像素样本,依序抽取出预设比例的所述未标注超像素样本并更新至所述训练样本集;
根据所述训练样本集,对分类模型重复迭代训练。
优选地,所述获取地基云样本图像,确定已标注超像素样本和未标注超像素样本的步骤包括:
获取地基云样本图像并进行超像素分割,其中,所述地基云样本图像包括完全标注样本图像、未标注样本图像、以及未完全标注样本图像;
对超像素分割后的地基云样本图像超像素特征提取;
根据超像素特征提取后的完全标注样本图像和未完全标注样本图像,确定所述已标注超像素样本;
根据所述已标注超像素样本,确定所述超像素特征提取后的地基云样本图像中剩余的为未标注超像素样本。
优选地,所述根据超像素特征提取后的完全标注样本图像和未完全标注样本图像,确定所述已标注超像素样本的步骤,包括:
根据超像素特征提取后的完全标注样本图像和未完全标注样本图像中,超像素所包含的像素中已标注的像素数量占该超像素的像素总数的比例;
若比例大于预设阀值,则确定该超像素为已标注超像素样本。
为实现上述目的,本发明提供了一种基于模型自训练的地基云图像云检测方法,包括:
获取待预测图像;
将所述待预测图像输入目标分类模型进行图像分类;
根据分类结果形成云检测结果图;
其中,所述目标分类模型为如权利要求1至6任意一项所述的地基云图像分类模型的训练方法训练得到。
为实现上述目的,本发明提供了一种地基云图像分类模型的训练装置,包括:
获取样本单元,用于获取地基云样本图像,确定已标注超像素样本和未标注超像素样本;
确定样本单元,用于根据已标注超像素样本,确定训练样本集;
初始模型单元,用于根据所述训练样本集,对预设的分类器模型进行训练,得到分类模型;
循环迭代单元,用于循环选取部分所述未标注超像素样本更新至所述训练样本集,并对所述分类模型重复迭代训练;
目标确定单元,用于在检测到所述未标注超像素样本全部更新至所述训练样本集,确定训练后的分类模型为目标分类模型。
为实现上述目的,本发明提供了一种终端,所述终端包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的地基云图像分类模型的训练程序,所述地基云图像分类模型的训练程序配置为实现上述的地基云图像分类模型的训练方法的步骤。
为了实现上述目的,本发明还提供一种存储介质,所述存储介质上存储有地基云图像分类模型的训练程序,所述地基云图像分类模型的训练程序被处理器执行时实现上述的地基云图像分类模型的训练方法的步骤。
本发明通过获取地基云样本图像,确定已标注超像素样本和未标注超像素样本,根据已标注超像素样本,确定训练样本集,根据所述训练样本集,对预设的分类器模型进行训练,得到分类模型,循环选取部分所述未标注超像素样本更新至所述训练样本集,并对所述分类模型重复迭代训练,在检测到所述未标注超像素样本全部更新至所述训练样本集,确定训练后的分类模型为目标分类模型,如此对样本标注数量的需求大幅度减少,能够大幅度降低使用成本,地基云图像云检测的鲁棒性和适应性强。
附图说明
图1是本发明实施例方案涉及的硬件运行环境的终端的结构示意图;
图2为本发明地基云图像分类模型的训练方法第一实施例的流程示意图;
图3为本发明地基云图像分类模型的训练方法第二实施例的流程示意图;
图4为本发明地基云图像分类模型的训练方法第三实施例的流程示意图;
图5为本发明地基云图像分类模型的训练方法第四实施例的流程示意图;
图6为本发明地基云图像分类模型的训练方法第五实施例的流程示意图;
图7为本发明基于模型自训练的地基云图像云检测方法第一实施例的流程示意图。
图8为本发明地基云图像分类模型的训练装置第一实施例的结构框图;
图9a为本发明提供的一实施例的完全标注样本图像;
图9b为本发明提供一实施例的未完全标注样本图像的;
图9c为本发明提供的一实施例的未标注样本图像;
图10a为本发明提供的一实施例的地基云样本图像;
图10b为图10a经过超像素分割后的地基云样本图像;
图11为本发明提供的基于模型自训练的地基云图像云检测方法的一实施例的示意图。
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
参照图1,图1为本发明实施例方案涉及的硬件运行环境的终端结构示意图。
如图1所示,该终端可以包括:处理器1001,例如中央处理器(Central ProcessingUnit,CPU),通信总线1002、用户接口1003,网络接口1004,存储器1005。其中,通信总线1002用于实现这些组件之间的连接通信。用户接口1003可以包括显示屏(Display)、输入模块比如键盘(Keyboard),可选用户接口1003还可以包括标准的有线接口、无线接口。网络接口1004可选的可以包括标准的有线接口、无线接口(如无线保真(WIreless-FIdelity,WI-FI)接口)。存储器1005可以是高速的随机存取存储器(Random Access Memory,RAM)存储器,也可以是稳定的非易失性存储器(Non-Volatile Memory,NVM),例如磁盘存储器。存储器1005可选的还可以是独立于前述处理器1001的存储装置。
本领域技术人员可以理解,图1中示出的结构并不构成对终端的限定,可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件布置。
如图1所示,作为一种存储介质的存储器1005中可以包括操作系统、数据存储模块、网络通信模块、用户接口模块以及地基云图像分类模型的训练程序。
在图1所示的终端中,网络接口1004主要用于与网络服务器进行数据通信;用户接口1003主要用于与用户进行数据交互;本发明终端中的处理器1001、存储器1005可以设置在终端中,所述终端通过处理器1001调用存储器1005中存储的地基云图像分类模型的训练程序,并执行本发明实施例提供的地基云图像分类模型的训练方法。
本发明实施例提供了一种地基云图像分类模型的训练方法,参照图2,图2为本发明地基云图像分类模型的训练方法第一实施例的流程示意图。
本实施例中,所述地基云图像分类模型的训练方法包括如下步骤:
步骤S10:获取地基云样本图像,确定已标注超像素样本和未标注超像素样本;
应该理解的是,执行主体为终端,地基云样本图像包括完全标注样本图像(例如图9a)、未标注样本图像(例如图9c)、以及未完全标注样本图像(例如图9b)。在发明中,未标注样本图像可以为大量,而完全标注样本图像可以为少量,换句话说,本发明对样本标注数量的需求量不大。
步骤S20:根据已标注超像素样本,确定训练样本集;
应该理解的是,将确定的已标注超像素样本确定训练样本集,用于训练预设的分类模型。
步骤S30:根据所述训练样本集,对预设的分类器模型进行训练,得到分类模型;
应该理解的是,预设的分类器可以为常规的分类器模型,例如支持向量机(SVM),人工神经网络(ANN)、随机森林决策(RF)等。而分类器模型的初始化,也可以参照常用的方式进行设置,通过将训练样本集中的已标注超像素样本作为训练样本,对预设的分类器模型进行训练,训练好的模型作为分类模型。
步骤S40:循环选取部分所述未标注超像素样本更新至所述训练样本集,并对所述分类模型重复迭代训练;
应该理解的是,所述循环选取部分所述未标注超像素样本更新至所述训练样本集指的是,循环选取所述未标注超像素样本中的部分超像素样本更新至所述训练样本集,其中未标注超像素样本不重复选取(换句话说,选取过的就不再选取)。每次选取剩下的未标注超像素样本中的部分超像素样本更新至所述训练样本集后,对分类模型迭代训练,如此循环,直至全部选取。选取的规则可以是按照一定规则,也可以是自定义的方式,例如每次选取剩下的未标注超像素样本中的5%的超像素样本更新至训练样本集。
步骤S50:在检测到所述未标注超像素样本全部更新至所述训练样本集,确定训练后的分类模型为目标分类模型。
应该理解的是,所述未标注超像素样本全部更新至训练样本集后,训练得到的分类模型即为目标分类模型。
本发明通过获取地基云样本图像,确定已标注超像素样本和未标注超像素样本,根据已标注超像素样本,确定训练样本集,根据所述训练样本集,对预设的分类器模型进行训练,得到分类模型,循环选取部分所述未标注超像素样本更新至所述训练样本集,并对所述分类模型重复迭代训练,在检测到所述未标注超像素样本全部更新至所述训练样本集,确定训练后的分类模型为目标分类模型,如此对样本标注数量的需求大幅度减少,能够大幅度降低使用成本,地基云图像云检测的鲁棒性和适应性强。
参考图3,图3为本发明地基云图像分类模型的训练方法第二实施例的流程示意图。
基于上述第一实施例,在本实施例中,所述步骤S30之后,所述步骤S40之前,还包括:
步骤S60:确定所述未标注超像素样本的伪标签及其置信度;
相应地,所述步骤S40的步骤,具体包括:
步骤S401:根据所述未标注超像素样本的伪标签及其置信度,循环选取部分所述未标注超像素样本更新至所述训练样本集,并对所述分类模型重复迭代训练。
参考图4,图4为本发明地基云图像分类模型的训练方法第三实施例的流程示意图。
基于上述第二实施例,在本实施例中,所述步骤S60包括:
步骤S601:计算所述未标注超像素样本所在地基云样本图像的红蓝比值Otsu阈值;
具体实现时,所述步骤S601包括:
(1)将各未标注超像素样本所在地基云样本图像转化为红蓝比值灰度图Irb(x,y)=Ir(x,y)/Ib(x,y);
其中,Ir(x,y)与Ib(x,y)分别为图像I(x,y)在R通道和B通道上的分量。
(2)统计Irb(x,y)中所有像素值,并归一化处理;
其中,归一化处理是将Irb(x,y)中所有像素值归一化到0-255区间内。
(3)假定该图像Irb(x,y)中的Otsu阈值为t,则图像前景(云)和背景(天空)的类间距离方差可以表示为:
G(t)=ω
其中,ω
(4)遍历t=[0,255]的整数值,选出使得G(t)最大的t值为阈值。
步骤S602:利用红蓝比值Otsu阈值对所述未标注超像素样本预测,得到预测值St;
具体实现时,所述步骤S602包括:
计算各未标注超像素样本中所包含所有像素点的Irb平均值与该未标注超像素样本所在地基云样本图像的红蓝比值Otsu阈值t之间的差值Drb=Irb-t;将Drb/255作为该未标注超像素样本的Otsu阈值评价得分St(即Otsu阈值给该未标注超像素样本的预测值),在本实施例中,St取值在[-1,1]区间内(例如St>0表示预测类别为“云”,St<0表示预测类别为“天空”)。
步骤S603:根据所述分类模型,对所述未标注超像素样本进行类别预测,得到类别预测值Sc;
具体实现时,通过分类模型对所述未标注超像素样本进行分类,并计算该分类得分值Sc(即类别预测值Sc,分类模型给出的属于某一类别的概率值),在本实施例中,Sc取值在[-1,1]区间内(例如Sc>0表示预测类别为“云”,Sc<0表示预测类别为“天空”)。
步骤S604:比较类别预测值Sc与预测值St;
步骤S605:根据比较结果,确定所述未标注超像素样本的伪标签及其置信度。
具体实现时,所述步骤S605包括:
1)若分类模型预测类别Sc与阈值预测类别St所表示的伪标签(“云”或者“天空”)相同,则确定该类别为预测样本的伪标签,且综合置信度为S=|(1-λ)Sc+λSt|,λ取0~1。
2)若分类模型预测类别Sc与阈值预测类别St所表示的伪标签(“云”或者“天空”)不同,且Sc大于或等于St,则将分类模型预测的预测结果作为所述未标注超像素样本的伪标签,且综合置信度为S=|(1-λ)Sc+λSt|,λ取0~1。
3)若分类模型预测类别Sc与阈值预测类别St所表示的伪标签(“云”或者“天空”)不同,且Sc小于St,则将Otsu阈值的预测结果作为所述未标注超像素样本的伪标签,且综合置信度为S=|(1-λ)Sc+λSt|,λ取0~1。
参考图5,图5为本发明地基云图像分类模型的训练方法第四实施例的流程示意图。
基于上述第三实施例,在本实施例中,所述步骤S401包括:
步骤S4011:根据所述未标注超像素样本的伪标签对应的置信度,对所述未标注超像素样本进行排序;
具体实现时,可以是根据所述未标注超像素样本的伪标签对应的置信度,按照置信度从大到小对所述未标注超像素样本排序。
步骤S4012:根据排序后的未标注超像素样本,依序抽取出预设比例的所述未标注超像素样本并更新至所述训练样本集;
具体实现时,可以是每次按照置信度从大到小,抽取预设比例的未标注超像素样本并更新至所述训练样本集,在本实施例中,预设比例为5%,即抽取置信度从到小前5%的未标注超像素样本合并至训练样本集。
需要说明的是,每次抽取后,剩下的未标注超像素样本中不包括已抽取过的未标注超像素样本,每次抽取预设比例的未标注超像素样本指的是抽取剩下的未标注超像素样本中预设比例的样本。
步骤S4013:根据所述训练样本集,对分类模型重复迭代训练。
参考图6,图6为本发明地基云图像分类模型的训练方法第五实施例的流程示意图。
基于上述第一实施例,在本实施例中,所述步骤S10包括:
步骤S101:获取地基云样本图像并进行超像素分割,其中,所述地基云样本图像包括完全标注样本图像、未标注样本图像、以及未完全标注样本图像;
应该理解的是,地基云样本图像的标注是在地基云图像上对像素点的标注。完全标注样本图像是指样本图像中的像素点全部标注,未完全标注样本图像指的是指样本图像中的像素点标注了一部分,未标注样本图像是指样本图像中的像素点未标注。
其中,超像素分割是一种利用图像像素的颜色信息,将图像分割成若干个小的区域即超像素。在本实施例中,超像素分割方法为采用的是SLIC(simple linear iterativecluster的简称)超像素分割算法,该算法将彩色图像转化为CIELAB颜色空间和XY坐标下的5维特征向量,然后对5维特征向量构造距离度量标准,对图像像素进行局部聚类,最终得到超像素分割结果,具体实现步骤如下:
(1)聚类中心初始化:设置拟定的超像素个数K(在本实施例中,将按照输入图像的尺寸设置不同的K值,K=N/100且取整数部分),则每个超像素的大小(包含像素点的个数)为N/K,然后以步长为S=sqrt(N/K)在图像中选择种子点作为初始的聚类中心。
(2)种子点微调:为了避免种子点落在图像中的边缘处,使超像素分割结果具有一定的边缘保持效果,在每个种子点n*n(在本实施例中,n取3或5,优选地,n取5)的邻域内计算所有像素的梯度值,将种子点重新设置为该邻域中梯度最小的点。图像中像素点的梯度G(x,y)计算如下:
其中,I(x,y)为坐标点(x,y)的像素灰度值。
(3)像素聚类:为每个像素点分配标签,即将其指定给距离度量最近的种子点,所使用的距离度量需要同时考虑到像素与种子点的空间距离和颜色特征距离。具体实现方法是在每一个像素点i的2S*2S领域内找到包含的种子点(因为种子点的选取步长为S,所以一般会包含多个),分别计算该像素点与各个种子点的距离度量D(i,j),取距离度量D最小的j,将像素点分配给种子点j所指示的聚类,所用的距离度量计算如下:
其中,l,a,b为像素点的LAB颜色空间中三通道的像素值;
i为像素点;
j为种子点;
x,y为像素点的在图像中的坐标位置;
N
N
(4)重定位种子点:按照步骤(3)为图像中所有像素指定分配点后,根据每个聚类中所包含的所有像素点重新确定每个聚类的中心点。计算聚类中所有像素点间两两之间的距离度量D(i,j),取该聚类中到其他点的距离度量和最小的点作为该聚类的新的聚类中心。
(5)将新的聚类中心视作步骤(2)中的种子点,重复迭代步骤(2)、(3)、(4),直到所有聚类中心点不再发生变化。在实际方法实现过程中,该步骤简化为固定迭代10次,一般能够达到希望的效果。
(6)最终得到分割图,与原输入图像大小一致,仅一通道,每个像素点的取值为给定的聚类标签。标签相同的像素点的对应的原图像中的区域即为超像素。原地基云图像如图10a及其经过超像素分割后得到的结果如图10b。
步骤S102:对超像素分割后的地基云样本图像超像素特征提取;
具体实现时,在经过步骤S101超像素分割后的地基云样本图像超像素特征提取,在本实施例中,该特征提取为提取视觉特征。该视觉特征可以包括颜色特征、超像素内部纹理特征、超像素领域纹理特征、超像素位置加权等等,具体如下:
(1)颜色特征提取
计算一个超像素内部所有像素点在多种颜色空间的各个通道分量的平均值和方差,在本实施例中,颜色空间的选择上选用了RBG颜色空间、Lab颜色空间、对立颜色空间三种,每种颜色空间的色彩像素值包含3个通道,分别计算平均值和方差,则在颜色方面,得到超像素的关于颜色的特征向量18维。
(2)超像素内部纹理特征提取
对于超像素内部的纹理特征,采用旋转不变的LBP描述子进行LBP编码的统计直方图计算。旋转不变的LBP编码的计算原理为:针对每一个像素,将与其相邻的8个像素点与该像素点进行对比,比该像素点大的记为1,比该像素点小的记为0,按照从左上方顺时针的顺序,将这8个0或1组成一个8位的二进制数,再对该二进制数进行移位操作使其所对应的十进制数最小,该十进制数即为该像素点的LBP编码。
得到超像素中所有像素点的LBP编码之后,由于LBP编码总共包含64个不同的十进制数,统计超像素中各个编码值的超像素个数,形成一个64维的直方图特征向量,用来表达超像素的内部纹理特征。
(3)超像素领域纹理特征提取
为了表达超像素与超像素之间的关系,得到超像素邻域纹理特征,在本实施例中,用超像素中心点的128维SIFT描述子特征作为该超像素的邻域纹理特征。本发明中采用的对于图像中某一固定点提取其SIFT描述子特征的具体实现步骤如下:
计算超像素中心点3S*3S邻域内所有点的8方向梯度;
统计领域内8方向梯度值直方图并将累加和最大的方向定位主方向;
将该领域划分为4*4子区域,计算每个子区域的以主方向作为起始方向8方向梯度直方图;
将所有子区域的梯度直方图串联为4*4*8=128维的特征向量。
对地基云样本图像超像素特征提取后,将提取的特征依次串联,可以得到超像素的综合特征。在本实施例中,经过上述计算后可得到超像素的综合特征共计颜色特征(在本实施例中,为16维)+超像素内部纹理特征(在本实施例中,为64维)+超像素领域纹理特征(在本实施例中,为128维),即18+64+128=210维。
与现有技术相比,本发明方法中采用超像素综合特征提取方式,所提取的地基云图像局部特征更加全面、表征能力更强。
步骤S103:根据超像素特征提取后的完全标注样本图像和未完全标注样本图像,确定所述已标注超像素样本;
具体实现时,所述步骤S103包括:
步骤S1031:根据超像素特征提取后的完全标注样本图像和未完全标注样本图像中,确定超像素所包含的像素中已标注的像素数量占该超像素的像素总数的比例;
应该理解的是,确定已标注超像素样本是先将地基云样本图像进行超像素分割,在超像素分割的结果基础上,对完全标注样本图像和未完全标注样本图像中的超像素进行判断。
步骤S1032:若比例大于预设阀值,则确定该超像素为已标注超像素样本。
在本实施例中,预设阀值为1/2,超像素特征提取后的完全标注样本图像和未完全标注样本图像中超像素所包含的像素中已标注的像素数量超过该超像素的像素的一半,则被认为则确定该超像素为已标注超像素样本。
步骤S104:根据所述已标注超像素样本,确定所述超像素特征提取后的地基云样本图像中剩余的为未标注超像素样本。
应该理解的是,所述超像素特征提取后的地基云样本图像中除去已经确认为已标注超像素样本的超像素外,剩下的超像素均为未标注超像素样本。
参考图7,图7为本发明基于模型自训练的地基云图像云检测方法第一实施例的流程示意图。
本实施例中,所述基于模型自训练的地基云图像云检测方法包括如下步骤:
步骤S701:获取待预测图像;
应该理解的是,执行主体为终端。
步骤S702:将所述待预测图像输入目标分类模型进行图像分类;
应该理解的是,该目标分类模型为经过上述地基云图像分类模型的训练方法训练得到的目标分类模型。
步骤S703:根据分类结果形成云检测结果图;
具体实现时,请参阅图11,图11示出了基于模型自训练的地基云图像云检测方法的流程,将待预测图像输入目标分类模型后,先进行超像素分割,对超像素进行分类,得到超像素类型,根据超像素对应原图中的位置,给予相应像素或区域特定的标签,即可得到图11最右侧的云检测结果,并标记为云像素的占比得到云的覆盖度百分比。
参照图8,图8为本发明地基云图像分类模型的训练装置第一实施例的结构框图。
如图8所示,本发明实施例提出的地基云图像分类模型的训练装置包括:
获取样本单元801,用于获取地基云样本图像,确定已标注超像素样本和未标注超像素样本;
应该理解的是,地基云样本图像包括完全标注样本图像(例如图9a)、未标注样本图像(例如图9c)、以及未完全标注样本图像(例如图9b)。在发明中,未标注样本图像可以为大量,而完全标注样本图像未完全标注样本图像可以为少量,换句话说,本发明对样本标注数量的需求量不大。
确定样本单元802,用于根据已标注超像素样本,确定训练样本集;
应该理解的是,将确定的已标注超像素样本确定训练样本集,用于训练预设的分类模型。
初始模型单元803,用于根据所述训练样本集,对预设的分类器模型进行训练,得到分类模型;
应该理解的是,预设的分类器可以为常规的分类器模型,例如支持向量机(SVM),人工神经网络(ANN)、随机森林决策(RF)等。而分类器模型的初始化,也可以参照常用的方式进行设置,通过将训练样本集中的已标注超像素样本作为训练样本,对预设的分类器模型进行训练,训练好的模型作为分类模型。
循环迭代单元804,用于循环选取部分所述未标注超像素样本更新至所述训练样本集,并对所述分类模型重复迭代训练;
应该理解的是,所述循环选取部分所述未标注超像素样本更新至所述训练样本集指的是,循环选取所述未标注超像素样本中的部分超像素样本更新至所述训练样本集,其中未标注超像素样本不重复选取(换句话说,选取过的就不再选取)。每次选取剩下的未标注超像素样本中的部分超像素样本更新至所述训练样本集后,对分类模型迭代训练,如此循环,直至全部选取。选取的规则可以是按照一定规则,也可以是自定义的方式,例如每次选取剩下的未标注超像素样本中的5%的超像素样本更新至训练样本集。
目标确定单元805,用于在检测到所述未标注超像素样本全部更新至所述训练样本集,确定训练后的分类模型为目标分类模型。
应该理解的是,所述未标注超像素样本全部更新至训练样本集后,训练得到的分类模型即为目标分类模型。
本发明通过获取地基云样本图像,确定已标注超像素样本和未标注超像素样本,根据已标注超像素样本,确定训练样本集,根据所述训练样本集,对预设的分类器模型进行训练,得到分类模型,循环选取部分所述未标注超像素样本更新至所述训练样本集,并对所述分类模型重复迭代训练,在检测到所述未标注超像素样本全部更新至所述训练样本集,确定训练后的分类模型为目标分类模型,如此对样本标注数量的需求大幅度减少,能够大幅度降低使用成本,地基云图像云检测的鲁棒性和适应性强。
此外,本发明实施例还提出一种存储介质,所述存储介质上存储有地基云图像分类模型的训练程序,所述地基云图像分类模型的训练程序被处理器执行时实现如上文所述的地基云图像分类模型的训练方法的步骤。
本发明地基云图像分类模型的训练装置的其他实施例或具体实现方式可参照上述各方法实施例,此处不再赘述。
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质(如只读存储器/随机存取存储器、磁碟、光盘)中,包括若干指令用以使得一台终端设备(可以是手机,计算机,服务器,空调器,或者网络设备等)执行本发明各个实施例所述的方法。
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种基于模型自训练的地基云图像云检测方法
- 一种SAR图像信息辅助的遥感光学图像浓云检测方法及系统