一种火箭软着陆制导方法
文献发布时间:2023-06-19 10:40:10
技术领域
本发明属于运载火箭控制技术领域,更具体地说,是涉及一种火箭软着陆制导方法。
背景技术
目前能够实现火箭垂直着陆的Falcon系列火箭,其一级或助推级均配置有9台Merlin 1D发动机,通过在着陆过程中仅开启其中几台而不是全部发动机既能够大幅降低推重比,还可以保持推力对称,维持姿态控制稳定。火箭通过调节发动机推力,在着陆前使推重比等于1,以安全落速实现匀速着陆。然而,目前很多现役火箭一级或助推级均只并联了少量发动机,如中国CZ-5、CZ-7火箭,欧洲Ariane 6,日本H3火箭等,一级均只配置了两台发动机。若着陆过程中关闭一台,则很难保持姿态稳定;若不关闭则要求发动机具备深度节流能力,而大推力发动机深度节流一直是一个难题。如果制导方法在最小推力仍大于火箭重力的大推重比条件下仍能够实现火箭定点软着陆,则可以缓解发动机深度节流的压力,使得在役火箭通过发动机节流能力的适当调整,就可以经济的升级为可重复使用运载火箭,避免为了重复使用而设计多台发动机并联的新火箭。但是大推重比条件下,火箭动力着陆段的物理可行域被大幅度压缩,在干扰状态下易飞出可行域,从而难以实现定点软着陆。
发明内容
本发明的目的在于提供一种火箭软着陆制导方法,旨在解决现有火箭垂直着陆时,在干扰状态下易飞出可行域,导致软着陆位置不精确的问题。
为实现上述目的,本发明采用的技术方案是:
一种火箭软着陆制导方法,包括:
采用自适应发动机开机方法获取发动机开机指令;
依照所述发动机开机指令打开火箭发动机,火箭进入软着陆阶段;
根据火箭软着陆运动过程建立火箭动力软着陆段第一运动方程和火箭动力软着陆段第一状态约束方程;
根据所述火箭动力软着陆段第一运动方程和所述火箭动力软着陆段第一状态约束方程建立火箭动力软着陆段在线轨迹规划方程;
获取火箭的当前状态量和当前控制量;所述当前状态量包括速度和位置;所述当前控制量包括推力幅值和程序角;
根据所述当前状态量和所述火箭动力软着陆段在线轨迹规划方程得到火箭的理想控制量;所述理想控制量包括理想推力幅值和理想程序角;
采用制导跟踪方法修正理想控制量与当前控制量的偏差;
获取火箭动力软着陆段的标准速度关机量和标准高度关机量;
根据所述标准速度关机量、所述标准高度关机量以及小步长预测关机方法得到火箭发动机关机指令;
依据所述发动机关机指令关闭发动机,火箭软着陆完成。
优选的,所述采用自适应发动机开机方法获取发动机开机指令包括:
根据火箭软着陆运动过程建立火箭动力软着陆段第二运动方程和火箭动力软着陆段第二状态约束方程;
根据所述火箭动力软着陆段第二运动方程和所述火箭动力软着陆段第二状态约束方程建立火箭理想开机速度轨迹规划方程;
获取火箭当前位置和当前速度;
根据所述火箭当前位置和所述火箭理想开机速度轨迹规划方程得到火箭的当前位置理想着陆时间和当前位置理想开机速度;
根据所述当前位置理想着陆时间、所述当前位置理想开机速度和所述当前速度确定所述发动机开机指令。
优选的,所述火箭动力软着陆段第一运动方程包括:
D=0.5ρS
其中,r=[x,y,z]
优选的,所述火箭动力软着陆段第一状态约束方程包括:第一初始状态约束方程、第一终端状态约束方程和第一过程约束方程;
所述第一初始状态约束方程包括:
[r
其中,t
所述第一终端状态约束方程包括:
V
其中,t
所述第一过程约束方程包括:
其中,
优选的,所述根据所述火箭动力软着陆段第一运动方程和所述火箭动力软着陆段第一状态约束方程建立火箭动力软着陆段在线轨迹规划方程,包括:
联立所述火箭动力软着陆段第一运动方程和所述火箭动力软着陆段第一状态约束方程,同时以动力软着陆段燃料最省为优化目标建立所述火箭动力软着陆段在线轨迹规划方程;
所述火箭动力软着陆段在线轨迹规划方程包括:
min J=-m(t
[r
V
T
优选的,所述火箭动力软着陆段第二运动方程包括:
D=0.5ρS
优选的,火箭动力软着陆段第二状态约束方程包括:第二初始状态约束方程、第二终端状态约束方程和第二过程约束方程:
所述第二初始状态约束方程包括:
r
其中,t
所述第二终端状态约束方程包括:
r
所述第二过程约束方程包括:
其中,T
优选的,所述根据所述火箭动力软着陆段第二运动方程和所述火箭动力软着陆段第二状态约束方程建立火箭理想开机速度轨迹规划方程,包括:
联立火箭动力软着陆段第二运动方程和所述火箭动力软着陆段第二状态约束方程,同时以动力软着陆段燃料最省为优化目标建立所述火箭理想开机速度轨迹规划方程;
所述火箭理想开机速度轨迹规划方程包括:
minJ=-m(t
本发明提供的一种火箭软着陆制导方法的有益效果在于:与现有技术相比,本发明提出了通过自适应发动机开机方法获取发动机开机指令,为发动机开机后的着陆过程创造良好初始接入条件,而且根据火箭着陆飞行状态建立的火箭动力软着陆段在线轨迹规划方程,可以实时在线滚动规划后续飞行过程偏差适应能力最强的标称轨迹;通过制导跟踪方法,可以将火箭导引向实时生成的标称轨迹,大大降低火箭着陆过程中干扰的影响;此外,本发明还通过小步长预测关机方法确定发动机关机条件,进一步提升火箭的着陆精度。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
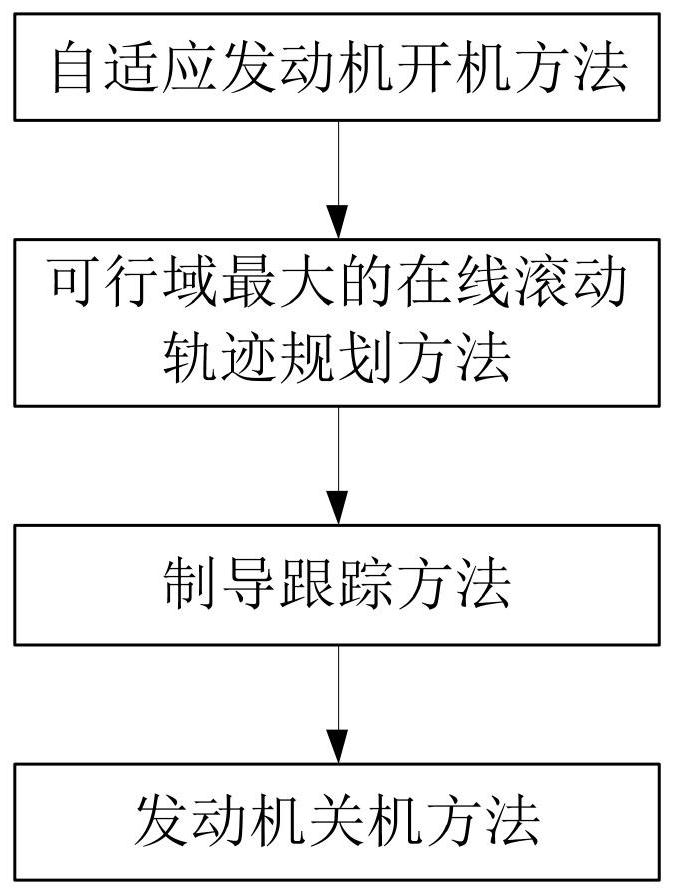
图1为本发明实施例提供的一种火箭软着陆制导方法流程图;
图2为本发明实施例提供的一种火箭软着陆制导方法原理图。
具体实施方式
为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
请一并参阅图1、2,现对本发明提供的一种火箭软着陆制导方法进行说明。一种火箭软着陆制导方法,包括:
步骤101:采用自适应发动机开机方法获取发动机开机指令;
为得到火箭进入动力软着陆段的发动机开机条件,本发明提出了一种可重复使用运载火箭动力软着陆段自适应发动机开机方法,使得火箭能够在可行域最大的条件下进入动力软着陆段,提升动力软着陆段的偏差适应能力。
步骤101具体包括:
S1:根据火箭软着陆运动过程建立火箭动力软着陆段第二运动方程和火箭动力软着陆段第二状态约束方程。
下面对着一过程进行进一步描述,定义目标坐标系,在目标坐标系下描述火箭动力软着陆段的运动。目标坐标系原点O在着陆点,OY轴垂直目标点当地水平面指向天,OX轴在目标点当地水平面内指向发射点,OZ轴满足右手定则。在描述动力软着陆段三自由度质心运动方程时,将火箭视为质点,考虑发动机推力、气动力以及质量变化对火箭运动过程的影响,忽略绕质心姿态运动的动态过程,认为火箭姿态能够实时响应程序角指令。定义发动机推力始终沿火箭轴向,推力矢量与OXY平面之间的夹角为偏航角ψ,推力矢量在OXY平面内的投影与OX轴之间的夹角为俯仰角
建立的火箭动力软着陆段第二运动方程如下:
其中,r=[x,y,z]
火箭动力软着陆段第二状态约束方程包括:第二初始状态约束方程、第二终端状态约束方程和第二过程约束方程;
第二初始状态约束方程包括:
r
其中,t
第二终端状态约束方程包括:
r
第二过程约束方程包括:
其中,T
S2:根据火箭动力软着陆段第二运动方程和火箭动力软着陆段第二状态约束方程建立火箭理想开机速度轨迹规划方程;
进一步的,根据(1)-(4)中描述的约束条件,以动力软着陆段燃料最省为优化目标,构建可行域最大的理想开机速度轨迹规划问题,具体形式如下:
其中,minJ=-m(t
S3:获取火箭当前位置和当前速度;
S4:根据火箭当前位置和火箭理想开机速度轨迹规划方程得到火箭的当前位置理想着陆时间和当前位置理想开机速度;
利用数值优化算法(例如:内点法或序列二次规划算法)求解可行域最大的理想开机速度轨迹规划问题,可得到最优解。则最优解的终端时间为t
S5:根据当前位置理想着陆时间、当前位置理想开机速度和当前速度确定发动机开机指令。
具体的,定义动力软着陆段可允许最短飞行时间为t
其中p
定义上一控制周期对应是时间为t
本发明提出的自适应发动机开机方法,在线规划中值推力着陆的标准轨迹,得到当前位置对应的理想初始速度,通过计算当前速度与理想速度的偏差,在偏差最小时发出发动机开机指令,同时在线生成的推力中值标准轨迹可作为后续火箭动力软着陆段在线轨迹规划方程的初始猜测值,提升在线规划算法计算效率。
步骤102:依照发动机开机指令打开火箭发动机,火箭进入软着陆阶段;
步骤103:根据火箭软着陆运动过程建立火箭动力软着陆段第一运动方程和火箭动力软着陆段第一状态约束方程;
火箭动力软着陆段第一运动方程是在目标坐标系中建立的包括:
其中,r=[x,y,z]
火箭动力软着陆段第一状态约束方程包括:第一初始状态约束方程、第一终端状态约束方程和第一过程约束方程;
第一初始状态约束方程包括:
[r
其中,t
第一终端状态约束方程包括:
V
其中,t
第一过程约束方程包括:
其中,
步骤104:根据火箭动力软着陆段第一运动方程和火箭动力软着陆段第一状态约束方程建立火箭动力软着陆段在线轨迹规划方程;
根据(7)-(10)中描述的约束条件,以动力软着陆段燃料最省为优化目标,构建可行域最大的动力软着陆段轨迹规划命题,具体形式如下,
min J=-m(t
[r
V
T
火箭在发动机开机后进入动力软着陆段,本发明在描述规划问题时引入推力变化率的影响,通过限制推力变化率的幅值,构建可行域最大的火箭动力软着陆段在线轨迹规划方程。在每个规划周期,根据火箭当前时刻的飞行状态,采用非线性规划算法(如牛顿法、内点法、序列二次规划等)滚动求解满足约束条件的离散化最优飞行轨迹状态量和推力控制矢量,使得最优推力幅值控制量变化尽可能平缓,并与最大值和最小值之间留出余量,使得推力始终具备正向和负向的调节能力,应对后续飞行过程中可能出现的干扰或偏差,从而在物理可行域内尽可能提升火箭对后续飞行过程不确定性的适应能力。
步骤105:获取火箭的当前状态量和当前控制量;当前状态量包括速度和位置;当前控制量包括推力幅值和程序角;
步骤106:根据当前状态量和火箭动力软着陆段在线轨迹规划方程得到火箭的理想控制量;理想控制量包括理想推力幅值和理想程序角;
步骤107:采用制导跟踪方法修正理想控制量与当前控制量的偏差;
进一步的,由于制导周期比规划周期短,因此在火箭当前飞行时刻,根据任务特点选取合适的插值自变量(如时间、速度、位置等),在火箭动力软着陆段在线轨迹规划方程最新生成的标准轨迹状态序列上,插值(如线性插值、二次曲线插值、三次样条等)得到火箭当前时刻的理想状态量和理想控制量。根据火箭当前实际状态与理想状态的偏差,利用制导跟踪方法(如PID控制、LQR控制等)实时修正理想控制量,可以大大提高火箭的着陆精度。
步骤108:获取火箭动力软着陆段的标准速度关机量和标准高度关机量;
步骤109:根据标准速度关机量、标准高度关机量以及小步长预测关机方法得到火箭发动机关机指令;
结合火箭发动机关机后效影响和火箭着陆时的理想质量,计算能够以理想速度(例如-1m/s)实现着陆对应的关机时刻速度、高度值,作为火箭动力软着陆段的标准速度关机量和标准高度关机量。在火箭进入动力软着陆段后,根据当前速度和高度,以及每个制导周期的速度变化率和高度变化率,分别预测到达标准速度关机量和标准高度关机量的剩余时间,并取两者最小值作为预测待飞时间。为降低制导周期对关机精度的影响,采用小步长预测关机方法,当预测待飞时间小于N个制导周期(如N可取1、2、3)后,启动1ms计时,使得关机指令的发出精度小于1ms,提升着陆精度。
步骤1010:依据发动机关机指令关闭发动机,火箭软着陆完成。
本发明提供的一种火箭软着陆制导方法的有益效果在于:与现有技术相比,本发明提出了通过自适应发动机开机方法获取发动机开机指令,为发动机开机后的着陆过程创造良好初始接入条件,而且根据火箭着陆飞行状态建立的火箭动力软着陆段在线轨迹规划方程,可以实时在线滚动规划后续飞行过程偏差适应能力最强的标称轨迹;通过制导跟踪方法,可以将火箭导引向实时生成的标称轨迹,大大降低火箭着陆过程中干扰的影响;此外,本发明还通过小步长预测关机方法确定发动机关机条件,进一步提升火箭的着陆精度,且本发明适用于在大推重比条件下,火箭动力反推软着陆过程。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种火箭软着陆制导方法
- 垂直起降运载火箭子级着陆段精确垂直软着陆四次多项式制导方法