自适应路面装置及AGV车
文献发布时间:2023-06-19 11:03:41
技术领域
本发明属于底盘系统技术领域,特别是涉及一种自适应路面装置及AGV车。
背景技术
AGV(Automated Guided Vehicle)是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶的运输车。该AGV车具有安全保护和各种搭载功能,广泛的应用于工厂中,AGV车可以将货物自动运输到特定的位置,其一般以可充电的蓄电池为动力来源,通过终端来控制其运输路径及行为,或利用电磁轨道来设立其行进路线,或依靠电磁轨道所带来的信息进行移动和动作。
现有技术中,AGV车在行驶过程中,如果在行进路径上遇到沟坎等障碍物时,其因车轮打滑而导致AGV车无法继续前行,或者采用绕过障碍物继续前行的方法;故现有技术中的AGV车在行驶过程中存在中难以越过障碍物的问题。
发明内容
本发明解决了现有技术中的AGV车在行驶过程中存在中难以越过障碍物等技术问题,提供了一种自适应路面装置及AGV车。
鉴于以上问题,本发明实施例提供的一种自适应路面装置,包括第一驱动件、第二驱动件、第一车轮、第二车轮、活动支架、底壳以及转动连接在所述底壳的底端上的连接杆;所述第一驱动件安装在所述活动支架上,且连接所述第一车轮;所述第二驱动件安装在所述活动支架上,且连接所述第二车轮;所述第一车轮的转轴与所述第二车轮的转轴重合并构建成轮轴线;
所述连接杆转动连接在所述活动支架的中心位置,所述第一车轮和所述第二车轮均安装在所述活动支架上,且所述第一车轮和所述第二车轮以所述连接杆的中心线为对称轴对称设置;所述连接杆的中心线与所述第一车轮的转轴垂直设置,且所述连接杆的中心线与水平面平行设置;
在所述第一车轮与所述第二车轮受力不均衡时,所述轮轴线绕所述连接杆的中心线转动而与水平面之间呈预设角度,所述连接杆的中心线以及所述底壳的底端均保持与水平面平行。
可选地,所述自适应路面装置还包括设有第一通孔的第一支撑座、设有第二通孔的第二支撑座,以及设有第三通孔的第三支撑座;所述第一支撑座安装在所述底壳的底端,所述连接杆穿过所述第一通孔与所述第一支撑座转动连接;所述第二支撑座和所述第三支撑座均安装在所述活动支架上,所述连接杆的相对两端分别转动连接在所述第二通孔和所述第三通孔中。
可选地,所述活动支架上设有容纳槽,所述第一支撑座、所述第二支撑座以及所述第三支撑座均位于所述容纳槽中。
可选地,所述自适应路面装置还包括底板,所述底板上设有第一通槽和第二通槽;所述底板安装在所述底壳上,且所述底板和所述底壳之间形成安装空间;所述活动支架、所述第一驱动件、所述第二驱动件、所述第一车轮以及所述第二车轮均安装在所述安装空间中;所述第一车轮伸出所述第一通槽,所述第二车轮伸出所述第二通槽。
可选地,所述自适应路面装置还包括第一电机架、第二电机架、第一连接轴以及第二连接轴;所述活动支架包括第一竖板、第二竖板以及连接在所述第一竖板和所述第二竖板之间的第一横板;
所述第一电机架安装在所述第一横板上,第一电机架上设有第一安装孔,所述第一竖板上设有第二安装孔;所述第一驱动件安装在所述第一电机架上,所述第一连接轴的一端转动安装在所述第二安装孔中,所述第一连接轴的另一端依次穿过所述第一车轮和所述第一安装孔连接所述第一驱动件;
所述第二电机架安装在所述第一横板上,第二电机架上设有第三安装孔,所述第二竖板上设有第四安装孔;所述第二驱动件安装在所述第二电机架上,所述第二连接轴的一端转动安装在所述第四安装孔中,所述第二连接轴的另一端依次穿过所述第二车轮和所述第三安装孔连接所述第二驱动件。
可选地,所述自适应路面装置还包括第三电机架、第四电机架、第三驱动件、第四驱动件、第三车轮以及第四车轮;所述第三电机架安装在所述底壳上;所述第三驱动件安装在所述第三电机架上,且连接所述第三车轮;
所述第四电机架安装在所述底壳上;所述第四驱动件安装在所述第四电机架上,且连接所述第四车轮;所述第三车轮的转轴与所述第四车轮的转轴重合。
可选地,所述自适应路面装置还包括第三连接轴、第四连接轴以及均安装在所述底壳上的第一固定块和第二固定块;所述第三电机架包括第三竖板以及连接所述第三竖板的第二横板,所述第二横板安装在所述底壳上,所述第三驱动件安装在所述第三竖板上;所述第三竖板上设有第五安装孔,所述第一固定块上设有第六安装孔,所述第三连接轴的一端转动安装在所述第六安装孔中,所述第三连接轴的另一端依次穿过所述第三车轮和所述第五安装孔连接所述第三驱动件;
所述第四电机架包括第四竖板以及连接所述第四竖板的第三横板,所述第三横板安装在所述底壳上,所述第四驱动件安装在所述第四竖板上;所述第四竖板上设有第七安装孔,所述第二固定块上设有第八安装孔,所述第四连接轴的一端转动安装在所述第八安装孔中,所述第四连接轴的另一端依次穿过所述第四车轮和所述第七安装孔连接所述第四驱动件。
可选地,所述自适应路面装置还包括电池以及均安装在所述底壳上的控制板、第一电池支架和第二电池支架;所述第一电池支架上设有第一凹槽,所述第二电池支架上设有第二凹槽,所述电池的相对两端分别插入所述第一凹槽和所述第二凹槽中;所述控制板连接所述电池、所述第一驱动件以及所述第二驱动件。本发明中,所述第一驱动件安装在所述活动支架上,且连接所述第一车轮;所述第二驱动件安装在所述活动支架上,且连接所述第二车轮;所述连接杆转动安装在所述活动支架上,所述第一车轮和所述第二车轮分别位于所述连接杆的相对两端;所述连接杆的中心线与所述第一车轮的转轴以及水平面垂直。本发明中,当该自适应路面装置在行进的过程中遇到凹坑或凸坎,且所述第一车轮接触沟坎时,所述活动支架将绕所述连接杆转动,所述活动支架将带动第二车轮向上或向下移动,从而保证所述第一车轮保持在接触沟坎的同时,所述第二车轮保持与地面接触的状态,进而所述第一车轮和所述第二车轮均具有驱动力,提高了AGV车的过沟和过坎的能力。另外,所述活动支架绕所述连接杆转动的过程中,所述底壳始终保持在水平状态,从而保证了AGV车越过沟坎时,AGV车上方始终保持水平的稳定状态,避免了AGV车上方货物在越过沟坎时发生掉落的现象。并且,该自适应路面装置1的结构简单,制造成本低。
本发明另一实施例还提供了一种AGV车,包括储物盒以及上述的自适应路面装置,所述储物盒安装在所述底壳上。
可选地,所述自适应路面装置还包括用于感应行驶路径的路径感应器,以及均安装在所述底壳上的障碍物感应器和报警器,所述障碍物感应器连接所述报警器。
附图说明
下面结合附图和实施例对本发明进一步说明。
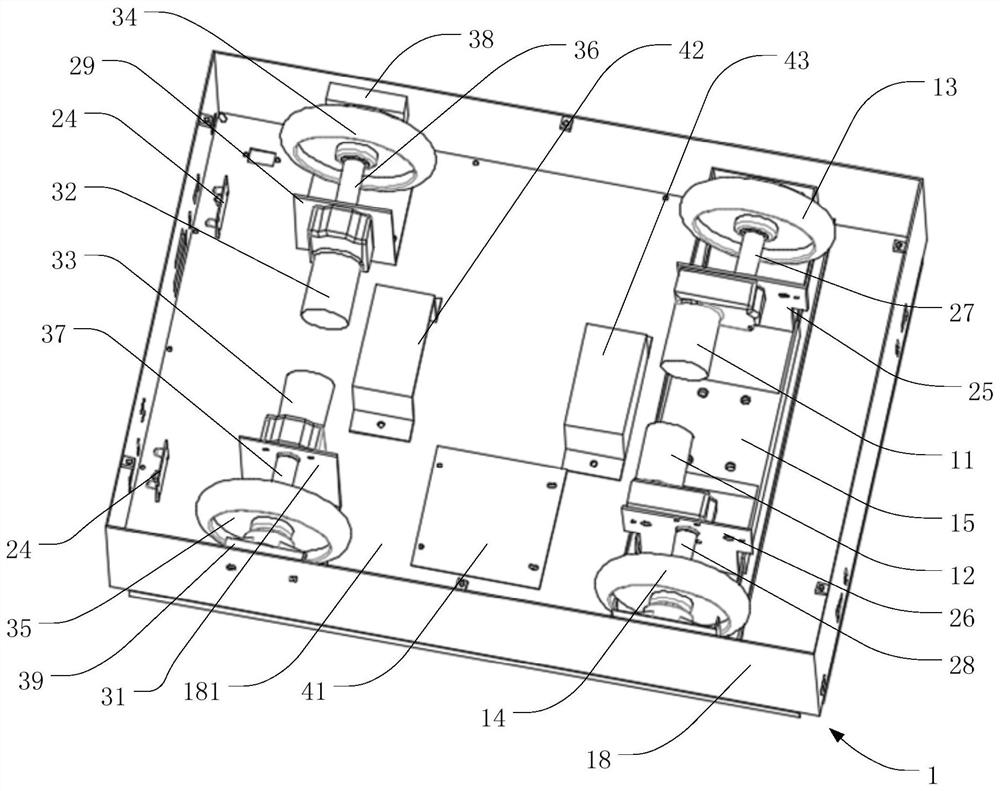
图1为本发明一实施例提供的自适应路面装置的结构示意图;
图2为本发明一实施例提供的自适应路面装置的另一视角的结构示意图;
图3为本发明一实施例提供的自适应路面装置的部分结构示意图;
图4为本发明一实施例提供的自适应路面装置的第一支撑座、第二支撑座以及第三支撑座安装在活动支架上的示意图;
图5为本发明一实施例提供的AGV车的结构示意图。
说明书中的附图标记如下:
1、自适应路面装置;11、第一驱动件;12、第二驱动件;13、第一车轮;14、第二车轮;15、活动支架;151、容纳槽;152、第一竖板;153、第二竖板;154、第一横板;16、第一支撑座;17、连接杆;18、底壳;181、安装空间;19、第二支撑座;21、第三支撑座;22、底板;221、第一通槽;222、第二通槽;223、第三通槽;224、第四通槽;23、路径感应器;24、障碍物感应器;25、第一电机架;26、第二电机架;27、第一连接轴;28、第二连接轴;29、第三电机架;31、第四电机架;32、第三驱动件;33、第四驱动件;34、第三车轮;35、第四车轮;36、第三连接轴;37、第四连接轴;38、第一固定块;39、第二固定块;41、控制板;42、第一电池支架;43、第二电池支架;10、储物盒。
具体实施方式
为了使本发明所解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步的详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
需要理解的是,术语“上”、“下”、“左”、“右”、“前”、“后”、“中部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为本发明的限制。
如图3和图4所示,本发明一实施例提供了一种自适应路面装置1,包括第一驱动件11、第二驱动件12、第一车轮13、第二车轮14、活动支架15、底壳18以及转动连接在所述底壳18上的连接杆17;所述第一驱动件11安装(通过螺钉连接等方式安装)在所述活动支架15上,且连接所述第一车轮13;所述第二驱动件12安装(通过螺钉连接等方式安装)在所述活动支架15上,且连接所述第二车轮14;所述第一车轮13的转轴与所述第二车轮14的转轴重合并构成轮轴线;可以理解地,所述活动支架15横跨所述底壳18,所述第一车轮13和所述第二车轮14分别位于所述底壳18的左右两端。进一步地,所述第一驱动件11和所述第二驱动件12包括但不限于电机等。
所述连接杆17转动安装在所述活动支架15的中心位置,所述第一车轮13和所述第二车轮15均安装在所述活动支架15上,且所述第一车轮13和所述第二车轮14以所述连接杆17的中心线为对称轴对称设置;所述连接杆17的中心线与所述第一车轮13的转轴垂直设置,且所述连接杆17的中心线与水平面平行设置。可以理解地,所述连接杆17沿所述底壳18的前后方向布置在所述底壳18上,所述活动支架15通过所述连接杆17转动安装在所述底壳18上;且所述第一车轮13和所述第二车轮14对称布置在所述连接杆17的左右两侧。
在所述第一车轮13与所述第二车轮14受力不均衡时,所述轮轴线绕所述连接杆14的中心线转动而与水平面之间呈预设角度,所述连接杆17的中心线以及所述底壳18的底端均保持与水平面平行。可以理解地,在该自适应路面装置1过沟坎时,所述第一车轮13和所述第二车轮14因沟坎等障碍物而受力不均衡,也即所述第一车轮13和所述第二车轮14不在同一个水平面上,此时,所述轮轴线以所述连接杆17为转轴转动,使得所述第一车轮13和所述第二车轮14均保持与外界固定物(也即障碍物、地面等)接触的状态,从而所述第一驱动件11可驱动所述第一车轮13输出驱动力,同时所述第二驱动件13可驱动所述第二车轮14发出驱动力。
具体地,所述第一车轮13和所述第二车轮14可以分别为AGV车左前轮和右前轮,也可以分别为AGV车的左后轮和右后轮,且所述第一驱动件11驱动所述第一车轮13转动,所述第二驱动件12驱动所述第二车轮14转动,故所述第一车轮13和所述第二车轮14均为驱动轮。进一步地,所述第一车轮13和所述第一驱动件11均可以设置两个,两个所述第一车轮13分别为AGV车的左前轮和左后轮;而所述第二车轮14和所述第二驱动件12均可以设置两个,两个所述第二车轮14分别为AGV车的右前轮和右后轮。
本发明中,所述第一驱动件11安装在所述活动支架15上,且连接所述第一车轮13;所述第二驱动件12安装在所述活动支架15上,且连接所述第二车轮14;所述连接杆17转动安装在所述活动支架15上,所述第一车轮13和所述第二车轮14分别位于所述连接杆17的相对两端;所述连接杆17的中心线与所述第一车轮13的转轴以及水平面垂直。本发明中,当该自适应路面装置1在行进的过程中遇到凹坑或凸坎,且所述第一车轮13接触沟坎时,所述活动支架15将绕所述连接杆17转动,所述活动支架15将带动第二车轮14向上或向下移动,从而保证所述第一车轮13保持在接触沟坎的同时,所述第二车轮14保持与地面接触的状态,进而所述第一车轮13和所述第二车轮14均具有驱动力,提高了AGV车的过沟和过坎的能力。另外,所述活动支架15绕所述连接杆17转动的过程中,所述底壳18始终保持在水平状态,从而保证了AGV车越过沟坎时,AGV车上方始终保持水平的稳定状态,避免了AGV车上方货物在越过沟坎时发生掉落的现象。并且,该自适应路面装置1的结构简单,制造成本低。
在一实施例中,如图4所示,所述自适应路面装置1还包括设有第一通孔的第一支撑座16、设有第二通孔的第二支撑座19,以及设有第三通孔的第三支撑座21;所述第二支撑座19和所述第三支撑座21均安装(通过螺钉连接等方式安装)在所述活动支架15上,所述第一支撑座16安装(通过螺钉连接等方式安装)在所述底壳18的底端,所述连接杆17穿过所述第一通孔与所述第一支撑座16转动连接;所述连接杆17的相对两端分别转动连接在所述第二通孔和所述第三通孔中。
也即,所述连接杆17通过所述第一通孔转动连接所述底壳18;同时所述连接杆17通过所述第二通孔和所述第三通孔转动安装在所述活动支架15上。可以理解地,所述第一支撑座16位于所述第二支撑座19和所述第三支撑座21之间。具体地,所述连接杆17的中间通过第一轴承转动安装在所述第一通孔中;所述连接杆17的一端通过第二轴承转动安装在所述第二通孔中,所述连接杆17的另一端通过第三轴承安装在所述第三通孔中。本发明中,以所述连接杆17为转动支点,带动所述第一车轮13和所述第二车轮14上下摆动;且在所述连接杆17摆动的过程中,所述连接杆17相对于所述第一支撑座16、所述第二支撑座19以及所述第三支撑座21转动,从而保证了AVG车的紧凑性和行驶过程中的稳定性。
在另一实施例中,所述第一支撑座16安装在所述活动支架15上,所述第二支撑座19和所述第三支撑座21安装在所述活动支架15上。
在又一实施例中,所述自适应路面装置1还包括设有第四通孔的第四支撑座以及设有第五通孔的第五支撑座;所述第四支撑座安装在底壳18上,所述第五支撑座安装在活动支架15上;可以理解地,所述活动支架15通过穿过所述第四通孔和所述第五通孔的所述连接杆17转动安装在所述底壳18上。本发明中,支撑座的个数和安装方式可以根据实际需求而设定,并不局限与上述三种形式。
在一实施例中,如图1所示,所述活动支架15上设有容纳槽151,所述第一支撑座16、所述第二支撑座19以及所述第三支撑座21均位于所述容纳槽151中。可以理解地,所述容纳槽151布置在所述活动支架15的中间位置,所述容纳槽151的设计,提高了该自适应路面装置1的紧凑性,并且避免了所述连接杆17免收外界环境的干扰,提高了该自适应路面装置1的稳定性和使用寿命。
在一实施例中,如图1和图2所示,所述自适应路面装置1还包括底板22,所述底板22上设有第一通槽221和第二通槽222;所述底板22安装(通过螺钉连接、卡接等方式安装)在所述底壳18上,且所述底板22和所述底壳18之间形成安装空间181;所述活动支架15、所述第一驱动件11、所述第二驱动件12、所述第一车轮13以及所述第二车轮14均安装在所述安装空间181中;所述第一车轮13伸出所述第一通槽221,所述第二车轮14伸出所述第二通槽222。可以理解地,所述底板22安装在所述底壳18的下方,所述底壳18相当于开口朝向下方的箱体,所述底板22相当于盖住所述底壳18开口的箱盖;所述第一车轮13穿过所述第一通槽221接触地面,所述第二车轮14穿过所述第二通槽222接触地面。本发明中,所述活动支架15、所述第一驱动件11、所述第二驱动件12、所述第一车轮13以及所述第二车轮14均安装在所述安装空间181中,从而保证了AGV车行驶过程中,避免外界障碍物对所述第一驱动件11、所述第二驱动件12、电池以及控制板41等的损害,延长了该自适应路面装置1的使用寿命。
在一实施例中,如图1和图3所示,所述自适应路面装置1还包括第一电机架25、第二电机架26、第一连接轴27以及第二连接轴28;所述活动支架15包括第一竖板152、第二竖板153以及连接在所述第一竖板152和所述第二竖板153之间的第一横板154,所述第一横板154上设有所述容纳槽151;可以理解地,所述容纳槽151设置在所述第一横板154的中心位置,所述第一横板154通过所述第一支撑座16和所述连接杆17转动安装在所述底壳18上。
所述第一电机架25安装在所述第一横板154上,第一电机架25上设有第一安装孔,所述第一竖板152上设有第二安装孔;所述第一驱动件11安装在所述第一电机架25上,所述第一连接轴27的一端转动安装在所述第二安装孔中,所述第一连接轴27的另一端依次穿过所述第一车轮13和所述第一安装孔连接所述第一驱动件11;可以理解地,所述第一车轮13安装在所述第一竖板152和所述第一电机架25之间,所述第一连接轴27的一端通过第四轴承安装在所述第一安装孔中,所述第一连接轴27的另一端通过第五轴承安装在所述第二安装孔中。
所述第二电机架26安装在所述第一横板154上,第二电机架26上设有第三安装孔,所述第二竖板153上设有第四安装孔;所述第二驱动件12安装在所述第二电机架26上,所述第二连接轴28的一端转动安装在所述第四安装孔中,所述第二连接轴28的另一端依次穿过所述第二车轮14和所述第三安装孔连接所述第二驱动件12。可以理解地,所述第二车轮14安装在所述第二竖板153和所述第二电机架26之间,所述第二连接轴28的一端通过第六轴承安装在所述第三安装孔中,所述第二连接轴28的另一端通过第七轴承安装在所述第四安装孔中。本发明中,所述自适应路面装置1的结构紧凑,稳定性高。
在一实施例中,如图1所示,所述自适应路面装置1还包括第三电机架29、第四电机架31、第三驱动件32、第四驱动件33、第三车轮34以及第四车轮35;所述第三电机架29安装在所述底壳18上;所述第三驱动件32安装(通过螺钉连接等方式安装)在所述第三电机架29上,且连接所述第三车轮34;可以理解地,所述第三驱动件32和所述第四驱动件33包括但不限于电机等;且所述第三车轮34和所述第四车轮35可以分别为AGV车的左前轮和右前轮,也可以为分别为AGV车的左后轮和右后轮;从而该自适应路面装置1为四驱机构,提高了AGV车的动力性和越过沟坎的能力。
所述第四电机架31安装(通过螺钉连接等方式安装)在所述底壳18上;所述第四驱动件33安装在所述第四电机架31上,且连接所述第四车轮35;所述第三车轮34的转轴与所述第四车轮35的转轴重合。可以理解地,所述底板22上还设有第三通槽223和第四通槽224,所述第三驱动件32、所述第四驱动件33、所述第三车轮34以及所述第四车轮35也安装在所述安装空间181中,所述第三车轮34穿过所述第三通槽223,所述第四车轮35穿过所述第四通槽224。本发明中,该自适应路面装置1的结构紧凑、稳定性高、安装方便。
在一实施例中,如图1所示,所述自适应路面装置1还包括第三连接轴36、第四连接轴37以及均安装在所述底壳18上的第一固定块38和第二固定块39;所述第三电机架29包括第三竖板以及连接所述第三竖板的第二横板,所述第二横板安装在所述底壳18上,所述第三驱动件32安装在所述第三竖板上;所述第三竖板上设有第五安装孔,所述第一固定块38上设有第六安装孔,所述第三连接轴36的一端转动安装在所述第六安装孔中,所述第三连接轴36的另一端依次穿过所述第三车轮34和所述第五安装孔连接所述第三驱动件32;可以理解地,所述第三连接轴36的一端通过第八轴承安装在所述第五安装孔中,所述第三连接轴36的另一端通过第九轴承安装在所述第六安装孔中,且所述第三车轮34位于所述第一固定块38和所述第三竖板之间。
所述第四电机架31包括第四竖板以及连接所述第四竖板的第三横板,所述第三横板安装在所述底壳18上,所述第四驱动件33安装在所述第四竖板上;所述第四竖板上设有第七安装孔,所述第二固定块39上设有第八安装孔,所述第四连接轴37的一端转动安装在所述第八安装孔中,所述第四连接轴37的另一端依次穿过所述第四车轮35和所述第七安装孔连接所述第四驱动件33。可以理解地,所述第四连接轴37的一端通过第九轴承安装在所述第七安装孔中,所述第四连接轴37的另一端通过第十轴承安装在所述第八安装孔中,且所述第四车轮35位于所述第二固定块39和所述第四竖板之间。本发明中,该自适应路面装置1的结构紧凑,稳定性高、安装方便。
在一实施例中,如图1所示,所述自适应路面装置1还包括电池(图未示)以及均安装在所述底壳18上的控制板41、第一电池支架42和第二电池支架43;所述第一电池支架42上设有第一凹槽,所述第二电池支架43上设有第二凹槽,所述电池的相对两端分别插入所述第一凹槽和所述第二凹槽中;所述控制板41连接所述电池、所述第一驱动件11以及所述第二驱动件12。可以理解地,所述控制板41还连接所述第三驱动件32、所述第四驱动件33、所述路径感应器23、所述障碍物感应器24以及所述报警装置。而所述电池为可充电电池,所述电池可以为该自适应路面装置1提供电力,保证了自适应路面装置1的正常行驶。
本发明另一实施例还提供了一种AGV车,包括储物盒10以及上述的自适应路面装置1,所述储物盒10安装在所述底壳18上。可以理解地,由于该自适应路面装置1在AGV车行驶过程中可以保证第一车轮13和第二车轮14始终与外界固定物接触的状态,并且AGV车的车身保持在平衡不倾斜的状态,从而避免了因所述储物盒10倾斜而发生的物料掉落的现象。
在一实施例中,如图1所示,所述自适应路面装置1还包括用于感应行驶路径的路径感应器23,以及安装(通过螺钉连接、卡接等方式安装)在所述底壳18上的障碍物感应器24和报警器(图未示),所述障碍物感应器24连接所述报警器。可以理解地,所述路径感应器23安装在所述底板22的下方,且所述路径感应器23包括但不限于磁感应器等,该磁感应器可以感应地面上的磁条,从而引导AGV车沿磁条的路径行驶。作为优选,所述路径感应器23设置有两个,两个所述路径感应器23分别安装在所述底板22前方和后方。进一步地,所述障碍物感应器24包括但不限于激光等距离感应器。具体地,当AGV车行驶过程中,所述障碍物感应器24检测到前方具有较大的障碍物时,所述第一报警器将放出报警信息,提成工作人员移去前方的障碍物,或者提示前方障碍物离开。本发明中,所述路径感应器23和所述障碍物感应器24的设计,保证了AGV车的正常行驶。
可以理解地,该自适应路面装置1还可以应用于童车、手推车等车辆上,并不局限与AGV侧。
以上仅为本发明较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 自适应路面装置及AGV车
- 一种自适应充电装置及AGV导航车