一种基于鸟类视觉特征的多运动目标搜索与定位装置及方法
文献发布时间:2023-06-19 11:16:08
技术领域
本发明涉及仿生设计技术领域,尤其涉及一种基于鸟类视觉特征的多运动目标搜索与定位装置及方法。
背景技术
随着社会的发展,科技的进步,仿生技术领域受到越来越多人的关注,仿生学的目的就是分析生物过程和结构,并把得到的分析结果用于未来的设计,对运动目标的搜索与跟踪定位是机器视觉领域研究的热点,其一是利用单目或者双目视觉对目标进行识别、跟踪和定位。
现有的技术方案在实际使用的时候存在一定的不足,一方面无法多多个目标同时进行大范围的搜寻与精准定位,而且现有的单目机构大多只能在水平和竖直对其进行调节,而单目机构的俯仰角度无法调节,灵活度不够,容易造成目标的丢失,因此需要设计一种基于鸟类视觉特征的多运动目标搜索与定位装置及方法来解决这些问题。
发明内容
本发明的目的是为了解决现有技术中不能同时对多个目标进行大范围搜寻和精准定位、灵活度不够的缺陷,从而提出一种基于鸟类视觉特征的多运动目标搜索与定位装置及方法。
为了实现上述目的,本发明采用了如下技术方案:
一种基于鸟类视觉特征的多运动目标搜索与定位装置,包括保护壳和平台底座,所述保护壳内设置有开口向上的柱形凹槽,所述平台底座与柱形凹槽内壁竖直滑动连接,所述柱形凹槽下侧内壁与平台底座下侧壁之间设置有竖直顶起装置,所述平台底座上侧壁边缘处依次均匀设置有第一单目调节机构、第二单目调节机构、第三单目调节机构和第四单目调节机构,所述平台底座上侧壁中心处固定连接有第一电动伸缩杆,所述第一电动伸缩杆顶端固定连接有主支撑座,所述主支撑座上依次均匀设置有第一固定相机、第二固定相机、第三固定相机和第四固定相机。
优选地,其特征在于,所述平台底座与柱形凹槽内壁通过滑块和滑槽滑动连接。
优选地,所述竖直顶起装置包括第一电机和丝杆,所述丝杆下端与柱形凹槽下侧内壁中心处转动连接,所述第一电机固定设置在柱形凹槽下侧内壁,所述第一电机输出轴固定连接有第一斜齿轮,所述丝杆上固定套设有与第一斜齿轮啮合的第二斜齿轮,所述丝杆上螺纹连接有升降螺母,所述升降螺母位于第二斜齿轮上方,所述升降螺母侧壁固定连接有位置对称的支撑杆,多组所述支撑杆远离升降螺母的一端均与平台底座下侧壁固定连接。
优选地,所述丝杆顶端固定连接有限位挡片,所述限位挡片的直径大于丝杆的直径。
优选地,所述第一单目调节机构包括下支撑座和上支撑座,所述上支撑座下侧壁与下支撑座上侧壁之间通过第二电动伸缩杆固定连接,且下支撑座位于平台底座上侧,所述平台底座内设置有与下支撑座匹配的电机腔,所述电机腔内设置有第二电机,所述第二电机输出轴向上贯穿调节腔上侧壁与下支撑座下侧壁中心处固定连接,所述上支撑座上侧壁固定设置有支撑框,所述上支撑框上侧壁固定连接有位置对称的支撑耳,所述支撑耳之间转动连接有转杆,所述转杆上固定套设有套筒,所述套筒靠近平台底座圆心的一侧固定连接有对应的单目相机,所述转杆一端向外贯穿支撑耳固定连接有第二圆齿轮,所述支撑耳与转杆连接处设置有匹配的第一轴承,所述支撑框内设置有与第二圆齿轮匹配的俯仰角度调节装置。
优选地,所述俯仰角度调节装置包括第三电机和第一圆齿轮,所述第三电机位于支撑框内,且第三电机通过固定块与支撑框固定连接,所述第三电机输出轴向外贯穿支撑框侧壁与第一圆齿轮固定连接,所述支撑框与第三电机输出轴连接处设置有匹配的第二轴承,所述第一圆齿轮与第二圆齿轮啮合设置。
优选地,所述第一单目调节机构、第二单目调节机构、第三单目调节机构和第四单目调节机构通过控制系统控制,所述控制系统包括与每个电机匹配的控制器、处理器和传感器。
一种基于鸟类视觉特征的多运动目标搜索与定位方法,其特征在于,包括以下步骤:
S1,启动第一电机,第一电机输出轴通过第一斜齿轮带动第二斜齿轮进而带动丝杆转动,与丝杆螺纹连接的升降螺母随之通过支撑杆向上顶起平台底座;
S2,控制第一电动伸缩杆和第二电动伸缩杆伸出合适长度,程序初始化,设置在主支撑座上的第一固定相机、第二固定相机、第三固定相机和第四固定相机开始搜寻目标;
S3,第一固定相机、第二固定相机、第三固定相机和第四固定相机对运动目标进行检测和标定,检测目标是否超出搜索范围;
S4,根据目标在固定相机上的位置,确定目标的空间位置,设置在平台底座上的多个单目调节机构接收信息,距离目标最近的单目调节机构随之激活,对目标进行领域线性搜索和跟踪;
S5,从S4获取的图像中进行目标提取、匹配深度信息计算,检测出定位目标距离单目调节机构的距离信息;
S6,第一单目调节机构、第二单目调节机构、第三单目调节机构和第四单目调节机构将搜寻平台分隔成四个区域,各区域之间的角度范围是九十度。
本发明的有益效果是:借鉴鸟类视觉的双凹结构特点,并贴合实际通过两个相机在不同位置所拍下的目标图像景深不同,可以将目标位置准确驱动出来,为多运动目标搜索与定位提供方法和思路,思路清晰,能够360度同时对多个运动苗木表进行搜寻与精确定位;
不用时可以将平台底座以及其上的目标搜寻与定位装置进行收纳保护,平台底座上的电子器件受到损坏,通过第一电动伸缩杆和第二电动伸缩杆的配合使用可以对多个固定相机和单目相机高度进行调节,通过第二电机的设置,可以控制多个单目相机的旋转角度,通过俯仰角度调节装置与套筒、转杆和第二斜齿轮的配合使用,可以通过控制第三电机控制单目相机俯仰角度。
附图说明
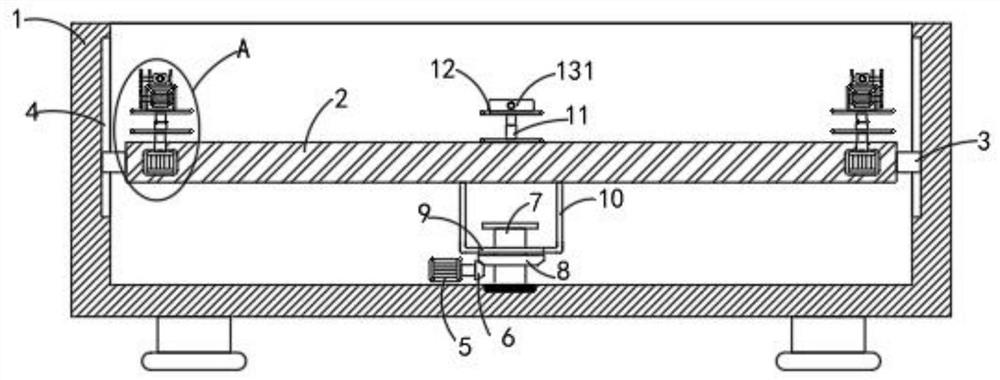
图1为本发明提出的一种基于鸟类视觉特征的多运动目标搜索与定位装置的结构示意图;
图2为图1中A处的放大图;
图3为本发明提出的一种基于鸟类视觉特征的多运动目标搜索与定位装置的平台底座俯视示意图;
图4为图3中B处的放大图;
图5为本发明提出的一种基于鸟类视觉特征的多运动目标搜索与定位装置的工作流程示意图。
图中:1保护壳、2平台底座、3滑块、4滑槽、5第一电机、6第一斜齿轮、7丝杆、8第二斜齿轮、9升降螺母、10支撑杆、11第一电动伸缩杆、12主支撑座、131第一固定相机、132第二固定相机、133第三固定相机、134第四固定相机、14第二电机、15下支撑座、16第二电动伸缩杆、17上支撑座、18支撑框、19支撑耳、20单目相机、201第一单目调节机构、202第二单目调节机构、203第三单目调节机构、204第四单目调节机构、21转杆、22第三电机、23固定块、24第一圆齿轮、25第二圆齿轮、26套筒。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
参照图1-5,一种基于鸟类视觉特征的多运动目标搜索与定位装置,包括保护壳1和平台底座2,保护壳1内设置有开口向上的柱形凹槽,平台底座2与柱形凹槽内壁竖直滑动连接,平台底座2与柱形凹槽内壁通过滑块3和滑槽4滑动连接,柱形凹槽下侧内壁与平台底座2下侧壁之间设置有竖直顶起装置,通过竖直顶起装置、柱形凹槽和保护壳1的配合使用,不用时可以将平台底座2以及其上的目标搜寻与定位装置进行收纳保护,平台底座2上的电子器件受到损坏,竖直顶起装置包括第一电机5和丝杆7,丝杆7下端与柱形凹槽下侧内壁中心处转动连接,第一电机5固定设置在柱形凹槽下侧内壁,第一电机5输出轴固定连接有第一斜齿轮6,丝杆7上固定套设有与第一斜齿轮6啮合的第二斜齿轮8,丝杆7上螺纹连接有升降螺母9,升降螺母9位于第二斜齿轮8上方,丝杆7顶端固定连接有限位挡片,限位挡片的直径大于丝杆7的直径,通过在丝杆7顶端设置限位挡片是为了避免升降螺母9从丝杆7上脱落,造成不必要的麻烦,升降螺母9侧壁固定连接有位置对称的支撑杆10,多组支撑杆10远离升降螺母9的一端均与平台底座2下侧壁固定连接;
平台底座2上侧壁边缘处依次均匀设置有第一单目调节机构201、第二单目调节机构202、第三单目调节机构203和第四单目调节机构204,第一单目调节机构201、第二单目调节机构202、第三单目调节机构203和第四单目调节机构204通过控制系统控制,控制系统包括与每个电机匹配的控制器、处理器和传感器,多个单目相机20、第一固定相机131、第二固定相机132、第三固定相机133和第四固定相机134输出端均与控制系统连接,本发明中,第一单目调节机构201、第二单目调节机构202、第三单目调节机构203和第四单目调节机构204结构相同,第一单目调节机构201包括下支撑座15和上支撑座17,上支撑座17下侧壁与下支撑座15上侧壁之间通过第二电动伸缩杆16固定连接,通过第一电动伸缩杆11和第二电动伸缩杆16的配合使用可以对多个固定相机和单目相机20高度进行调节,且下支撑座15位于平台底座2上侧,平台底座2内设置有与下支撑座15匹配的电机腔,电机腔内设置有第二电机14,第二电机14输出轴向上贯穿调节腔上侧壁与下支撑座15下侧壁中心处固定连接,通过第二电机14的设置,可以控制多个单目相机20的旋转角度,本发明中,第二电机14为减速电机;
上支撑座17上侧壁固定设置有支撑框18,上支撑框18上侧壁固定连接有位置对称的支撑耳19,支撑耳19之间转动连接有转杆21,转杆21上固定套设有套筒26,套筒26靠近平台底座2圆心的一侧固定连接有对应的单目相机20,转杆21一端向外贯穿支撑耳19固定连接有第二圆齿轮25,支撑耳19与转杆21连接处设置有匹配的第一轴承,支撑框18内设置有与第二圆齿轮25匹配的俯仰角度调节装置,通过俯仰角度调节装置与套筒26、转杆21和第二圆齿轮25的配合使用,可以通过控制第三电机22控制单目相机20俯仰角度,俯仰角度调节装置包括第三电机22和第一圆齿轮24,第三电机22位于支撑框18内,且第三电机22通过固定块23与支撑框18固定连接,第三电机22输出轴向外贯穿支撑框18侧壁与第一圆齿轮24固定连接,支撑框18与第三电机22输出轴连接处设置有匹配的第二轴承,第一圆齿轮24与第二圆齿轮25啮合设置,平台底座2上侧壁中心处固定连接有第一电动伸缩杆11,第一电动伸缩杆11顶端固定连接有主支撑座12,主支撑座12上依次均匀设置有第一固定相机131、第二固定相机132、第三固定相机133和第四固定相机134。
一种基于鸟类视觉特征的多运动目标搜索与定位方法,包括以下步骤:
S1,启动第一电机5,第一电机5输出轴通过第一斜齿轮6带动第二斜齿轮8进而带动丝杆7转动,与丝杆7螺纹连接的升降螺母9随之通过支撑杆10向上顶起平台底座2;
S2,控制第一电动伸缩杆11和第二电动伸缩杆16伸出合适长度,程序初始化,设置在主支撑座12上的第一固定相机131、第二固定相机132、第三固定相机133和第四固定相机134开始搜寻目标;
S3,第一固定相机131、第二固定相机132、第三固定相机133和第四固定相机134对运动目标进行检测和标定,检测目标是否超出搜索范围;
S4,根据目标在固定相机上的位置,确定目标的空间位置,设置在平台底座2上的多个单目调节机构接收信息,距离目标最近的单目调节机构随之激活,对目标进行领域线性搜索和跟踪;
S5,从S4获取的图像中进行目标提取、匹配深度信息计算,检测出定位目标距离单目调节机构的距离信息;
S6,第一单目调节机构201、第二单目调节机构202、第三单目调节机构203和第四单目调节机构204将搜寻平台分隔成四个区域,各区域之间的角度范围是九十度。
本发明中,借鉴鸟类视觉的双凹结构特点,并贴合实际通过两个相机在不同位置所拍下的目标图像景深不同,可以将目标位置准确驱动出来,为多运动目标搜索与定位提供方法和思路,思路清晰,能够360度同时对多个运动苗木表进行搜寻与精确定位。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种基于鸟类视觉特征的多运动目标搜索与定位装置及方法
- 基于鸟类视觉特征的多运动目标搜索与定位装置及方法