一种基于分布式声波传感技术的水下沉积物沉积特性测量装置与方法
文献发布时间:2023-06-19 11:16:08
技术领域
本发明涉及水下沉积物沉积特性测量领域,具体涉及一种基于分布式声波传感技术的水下沉积物沉积特性测量装置与方法
背景技术
水下沉积物主要是指以各种方式进入水体并最终在重力作用下沉积在水体底部的固态物质。在不同的位置,水下沉积物的类型以及与水体的分界面位置有着明显的差异性。研究水下沉积物的沉积特性对研究河海水文、环境演化有重要的作用。由于水体的天然阻隔,水下沉积物的类型以及与水体的分界面位置无法通过视觉观察得知。现有的水下沉积物特性探测的方法主要有几种:探地雷达测量法、采样器取样法和光纤光栅测量法。探地雷达法原理上是由于不同介质的介电常数不同,探地雷达接收到的电磁波的反射信号也会不同,通过分析探地雷达接收到的电磁波的频谱特征,获得水下的结构信息;但因其探测手段是电磁波探测,因此在测量过程中容易受到外界电磁场的干扰,从而对测量结果造成影响,并且当水下介质的介电系数相差不大时,探地雷达难以对水下的介质进行区分。采样器取样法是研究人员使用采样器在各个位置采集样品,分析得到水下不同位置的沉积物的粒度特征以及岩性特征,这种方法虽然能够直接测量水下沉积物性质,但测量效率低且工作量大,难以进行大尺度水下沉积物特性探测,更多地是作为真值获取方法供其他探测技术的比较研究。近年来新兴的光纤光栅测量法则是分析感知元件上各个位置光纤光栅的应变数据,从而判断出水下沉积物与水分界面位置。然而这种测量方法需要在感知元件上布置大量的光纤光栅,测量成本高,且在探测过程中光纤光栅极易在水中遭受破坏,需及时检查和更换损坏的光纤光栅。
发明内容
为了克服现有技术的不足,本发明的目的是提供一种基于分布式声波传感技术的水下沉积物沉积特性测量装置及方法,通过一条感测光纤探测出水下沉积物的类型、确定水下沉积物与水的分界面位置。
本发明采用以下技术方案:一种基于分布式声波传感技术的水下沉积物沉积特性测量装置,包括感知元件、分布式声波传感解调仪、光纤引线、计算机、信号发射器和脉冲振动器;所述的分布式声波传感解调仪的一端通过信号传输线与计算机相连,另一端通过光纤引线与感知元件相连;脉冲振动器固定在感知元件的顶部;所述感知元件由标杆和应变感测光纤组成,应变感测光纤嵌入标杆中。
所述标杆是一根截面为圆形的细长杆,标杆表面开槽,槽的方向与标杆的轴线方向平行,应变感测光纤固定槽内;光纤引线与感知元件中的应变感测光纤相连。
所述脉冲振动器包括三个模块:信号接收模块、脉冲振动模块和电源模块;三个模块电连接,电源模块负责给其他模块供电,当信号接收模块接收到信号发射器传来的发射信号后,脉冲振动模块随即产生脉冲振动,使感知元件发生振动。
所述的基于分布式声波传感技术的水下沉积物沉积特性测量装置的测量方法,包括如下步骤:
步骤一、在室内对测量装置进行标定试验,得到感知元件的振动频率与水下沉积物类型的经验关系曲线;
步骤二、将测量装置中的感知元件垂直插入水下某个待测位置,待装置稳定后,在岸边用信号发射器向脉冲振动器发射激发信号,分布式声波传感解调仪采集并记录感知元件振动时的应变数据;
步骤三、运用计算机软件提取步骤二中分布式声波传感解调仪记录的数据,按照从感知元件的顶部到底部的顺序对记录的应变数据进行排列,之后对各个位置的应变数据进行分析,从而确定水下沉积物与水的分界面位置;
步骤四、对记录的应变数据进行快速傅里叶变换,提取出感知元件振动的频率数据,根据感知元件的振动频率与水下沉积物类型的经验关系曲线,由测得的振动频率判断出水下沉积物的类型;
步骤五、每隔一定时间在水岸边用信号发射器发射信号,重复步骤三和四,测出感知元件所在位置处水下沉积物-水分界面位置和沉积物类型,并与之前的测量结果进行对比,得到水下沉积物-水分界面位置的升降情况及沉积物类型的变化情况,进而实现对海床、河床和湖床冲刷或淤积的长期监测,并判断出冲刷或淤积的沉积物类型及厚度。
不同位置的应变感测光纤记录了感知元件不同位置的应变信息,所述步骤一中,通过标定试验,确定每一道光纤记录对应的感知元件的位置,记录每一道光纤的道号以及对应的感知元件的位置,为之后分析光纤的应变数据提供位置参考。
通过室内标定试验得到感知元件的振动频率与水下沉积物类型的经验关系,对于同一个感知元件,不断改变水下沉积物的类型和感知元件的插入深度,用脉冲振动器让感知元件振动,得到若干感知元件振动的频率数据,之后对频率数据进行可视化处理,得到感知元件的振动频率与水下沉积物类型的经验关系曲线。
所述步骤三中,当感知元件振动时,在沉积物与水分界面位置附近,感知元件的应变最大,比较感知元件各个位置的应变数据,记录应变最大的光纤道号,该道对应的感知元件的位置即为水下沉积物与水的界面位置。
所述步骤四中,为了降低外界环境噪声对频率测量的干扰,先对数据进行去噪处理,去噪处理包括如下步骤:首先对每一道光纤数据进行主频分析,然后根据主频分析结果对光纤数据进行滤波处理,最后叠加各道滤波后的光纤数据,提升信噪比。
步骤四中,将测得的振动频率代入经验关系曲线,判断出水下沉积物的类型。
本发明的有益效果:
(1)可以快速、有效地确定水下沉积物-湖水界面位置,判断出水下沉积物的类型;
(2)分布式声波传感技术具有灵敏度高、耐腐蚀、抗电磁干扰强的优点,能够满足复杂和严苛的场景应用需求;
(3)与探地雷达测量法相比,利用分布式声波传感技术对水下沉积物探测,能有效地抵抗外界电磁场的干扰,并且探测不受水下介质介电常数的影响;与采样器取样法相比,利用分布式声波传感技术进行水下沉积物探测能大大提升探测的效率,并且利用分布式声波传感技术进行水下沉积物探测,不仅能够探测出水下沉积物的类型,还能确定水下沉积物与水的分界面位;与光纤光栅测量法相比,利用分布式声波传感技术进行水下沉积物探测不仅能确定水下沉积物与水的分界面位置,还能探测出水下沉积物的类型,并且探测不需要布设大量的感测元件。本方法操作简单,测量迅速,仅一条光纤即能获取水下沉积物-水界面位置,还能探测出水下沉积物的类型,测量成本大大降低,方便野外工作人员的使用;
(4)可以对海床、河床或湖床的冲刷及淤积进行长期监测,并判断出冲刷或淤积的沉积物类型及厚度。
附图说明
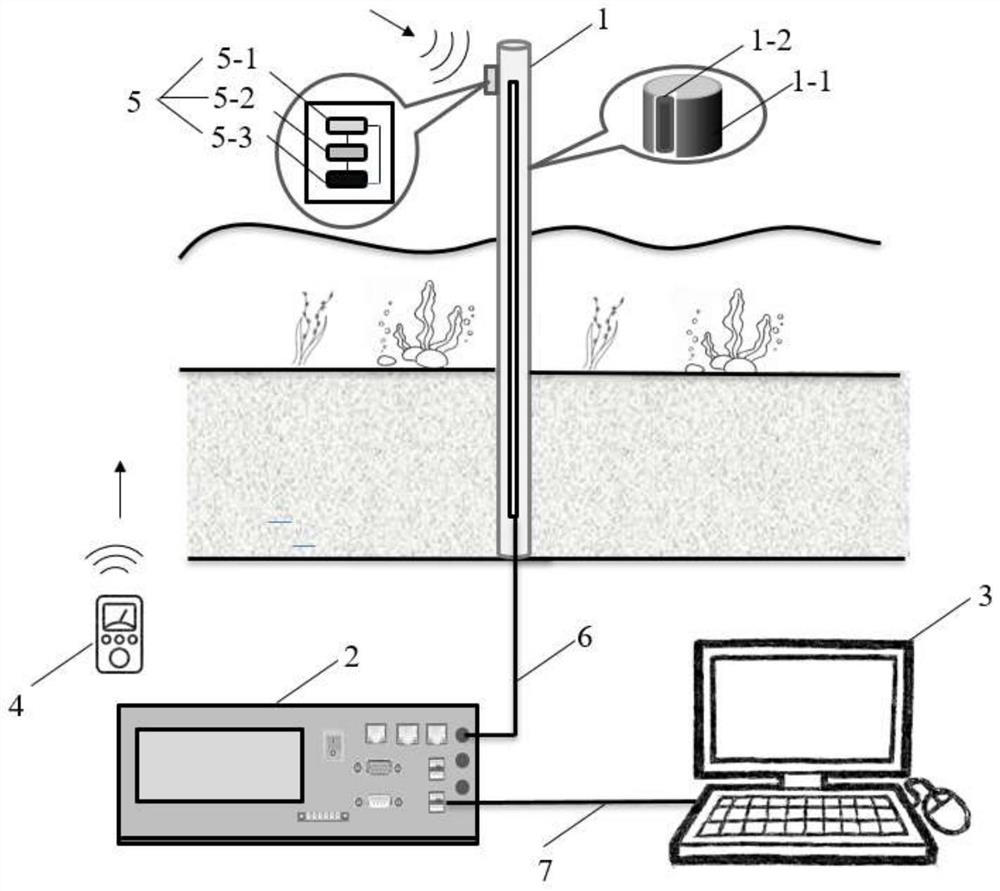
图1为本发明所述测量装置的结构示意图;
图2为本发明所述室内标定实验的示意图;
图3为本发明所述水下沉积物的简化示意图;
图4为本发明实施例1中感知元件振动频率与水下沉积物类型的经验关系曲线;
图5为本发明实施例1中感知元件的振动频率f
图6为本发明实施例1中感知元件的振动频率f
图中:1是感知元件、1-1是标杆、1-2是应变感测光纤、2是分布式声波传感解调仪、3是计算机、4是信号发射器、5是脉冲振动器、5-1是信号接收模块、5-2是脉冲振动模块、5-3是电源模块、6是光纤引线、7是信号传输线、8是室内模型箱、8-1是长方体水箱、8-2是水下沉积物、8-3是水。
具体实施方式
下面结合附图和优选实施例对本发明作更为具体的描述。
一种基于分布式声波传感技术的水下沉积物沉积特性测量装置,包括感知元件、光纤引线、分布式声波传感解调仪、计算机、信号发射器和脉冲振动器;分布式声波传感解调仪的一端通过信号传输线与计算机相连,另一端通过光纤引线与感知元件相连;脉冲振动器固定在感知元件的顶部;
进一步地,所述感知元件由标杆和应变感测光纤相连;标杆是一根截面为圆形的细长杆,标杆表面刻有一段笔直的槽,槽的方向与标杆的轴线方向平行,槽的截面为三角形,槽的深度为2-4mm,利用环氧树脂将应变感测光纤固定在槽内;光纤引线通过熔接的方式与感知元件中的应变感测光纤相连;
进一步地,所述脉冲振动器包括三个模块:信号接收模块、脉冲振动模块和电源模块;三个模块通过电路连接,电源模块负责给其他模块供电,当信号接收模块接收到信号发射器传来的发射信号后,脉冲振动模块随即产生脉冲振动,使感知元件发生振动;
基于所述测量装置的一种基于分布式声波传感技术的水下沉积物沉积特性测量方法,包括如下步骤:
步骤一、在室内对测量装置进行标定试验,得到感知元件的振动频率与水下沉积物类型的经验关系曲线;
步骤二、将测量装置中的感知元件垂直插入水下某个待测位置,待装置稳定后,在岸边用信号发射器向脉冲振动器发射激发信号,分布式声波传感解调仪采集并记录感知元件振动时的应变数据;
步骤三、运用计算机软件提取步骤二中分布式声波传感解调仪记录的数据,按照从感知元件的顶部到底部的顺序对记录的应变数据进行排列,之后对各个位置的应变数据进行分析,从而确定水下沉积物与水的分界面位置;
步骤四、对记录的应变数据进行快速傅里叶变换,提取出感知元件振动的频率数据,根据感知元件的振动频率与水下沉积物类型的经验关系曲线,由测得的振动频率判断出水下沉积物的类型;
步骤五、每隔一定时间在水岸边发射激发信号,重复步骤三和四,得到感知元件所在位置处水下沉积物-水分界面位置和沉积物类型,并与之前的测量结果进行对比,得到水下沉积物-水分界面位置的升降情况及沉积物类型的变化情况,进而实现对河床或湖床冲刷及淤积的长期监测,并判断出冲刷或淤积的沉积物类型及厚度。
进一步地,不同位置的应变感测光纤记录了感知元件不同位置的应变信息,所述步骤一中,通过标定试验,确定每一道光纤记录对应的感知元件的位置,并将每一道光纤记录的道号以及道号对应的感知元件的位置记录下来,为之后分析光纤的应变数据提供位置参考。
进一步地,通过室内标定试验可得到感知元件的振动频率与水下沉积物类型的经验关系,对于同一个感知元件,不断改变水下沉积物的类型和感知元件的插入深度,通过脉冲振动器让感知元件振动,得到若干感知元件振动的应变数据,对应变数据进行快速傅里叶变换得到频率数据,之后对频率数据进行可视化处理,得到感知元件的振动频率与水下沉积物类型的经验关系曲线。
进一步地,所述步骤三中,当感知元件振动时,在沉积物与水分界面位置附近,感知元件的应变最大,比较感知元件各个位置的应变数据,记录应变最大的光纤道号,该道对应的感知元件的位置即为水下沉积物与水的界面位置。
进一步地,所述步骤四中,为了降低外界环境噪声对频率测量的干扰,可先对数据进行去噪处理,去噪处理包括如下步骤:首先对每一道光纤数据进行主频分析,然后根据主频分析结果对光纤数据进行滤波处理,最后叠加各道滤波后的光纤数据,能大大提升信噪比。
进一步地,所述步骤四中,将测得的振动频率代入经验关系曲线,判断出水下沉积物的类型。
实施例1
一种基于分布式声波传感技术的水下沉积物沉积特性测量装置,包括感知元件1、分布式声波传感解调仪2、计算机3、信号发射器4、脉冲振动器5和光纤引线6;分布式声波传感解调仪2的一端通过信号传输线7与计算机3相连,另一端通过光纤引线6与感知元件1中的应变感测光纤1-2相连;所述感知元件1包括标杆1-1和应变感测光纤1-2;标杆1-1是一根截面为圆形的细长杆,标杆1-1表面刻有一段笔直的槽,槽的方向与标杆1-1的轴线方向平行,槽的截面为三角形,槽的深度为2-4mm,用环氧树脂将应变感测光纤1-2固定在刻槽内;光纤引线6通过熔接的方式与感知元件1中的应变感测光纤1-2相连;所述脉冲振动器5包括三个模块:信号接收模块5-1、脉冲振动模块5-2和电源模块5-3;三个模块通过电路连接,电源模块5-3负责给其他模块供电,当信号接收模块5-1接收到信号发射器传4来的发射信号后,脉冲振动模块5-2随即产生脉冲振动,使感知元件1发生振动,测量装置的结构示意图如附图1所示。
基于上述测量装置的水下沉积物沉积特性测量方法,包括如下步骤:
步骤一、连接测量装置,并在室内对测量装置进行标定试验;通过小型敲击试验,确定每一道光纤记录对应的感知元件的位置,将每一道光纤记录的道号以及道号对应的感知元件的位置记录下来;之后将感知元件1垂直插入室内模型箱8中,不断改变水下沉积物8-2的类型和感知元件1插入深度,并通过脉冲振动器5让感知元件1振动,得到若干感知元件1振动的频率数据,图2为室内标定试验的示意图,图2中,8-1为一个长方体水箱,8-2为加入的水下沉积物,8-3为加入的水;通过对振动频率数据进行可视化处理,得到感知元件1的振动频率与水下沉积物8-2类型的经验关系曲线;
步骤二、将测量装置中的感知元件1垂直插入某个待测位置中,待装置稳定后,在水岸边用信号发射器4向脉冲振动器5发射激发信号,分布式声波传感解调仪2采集并记录感知元件1振动时的应变数据;
步骤三、运用计算机软件提取步骤二中分布式声波传感解调仪2记录的数据,按照从感知元件1的顶部到底部的顺序对记录的应变数据进行排列,由力学知识可知,感知元件1的应变变化规律为:从感知元件1的顶部到底部,应变先变大然后立即变小,在水下沉积物与水的分界面位置附近,感知元件1的应变最大,因此,分析感知元件1各个位置的应变数据,记录应变最大的光纤道号,该道对应的感知元件的位置即为水下沉积物与水的分界面位置;
步骤四、对记录的应变数据进行快速傅里叶变换,提取出感知元件1振动的频率数据,根据感知元件1的振动频率与水下沉积物类型的经验关系曲线,由测得的振动频率判断出水下沉积物的类型;
步骤一中,感知元件1的振动频率与水下沉积物类型的经验关系是通过室内标定试验得到的,其试验的原理如下;
基于温克勒地基模型,将水下沉积物看成n个相互独立的弹簧,n为自然数,具体如图3所示,每一个弹簧的刚度K
K
其中,x
不同的水下沉积物8-2,其比例系数之间存在明显的差异,表1列出了水下沉积物比例系数的参考值;
对于同一个感知元件1,不断改变水下沉积物8-2的类型和感知元件1插入深度,通过室内标定试验可求出若干感知元件1振动的频率数据,对振动的频率数据进行可视化处理,得到感知元件1振动频率与水下沉积物类型的经验关系图;
图3中,H表示感知元件1的插入深度,L表示感知元件的总长度,l表示感知元件的悬臂长度,三者之间的关系可以表示:
l=L-H\*MERGEFORMAT (2)
步骤三中确定了水下沉积物-水的界面位置,根据此界面位置,可算出感知元件的插入深度为H和感知元件的悬臂长度l;
将感知元件1自由振动时的频率数据和感知元件1的悬臂长度l代入经验关系图,判断出水下沉积物的类型。
表1水下沉积物比例系数的参考值
步骤四中,为了降低外界环境噪声对频率测量的干扰,可先对数据进行去噪处理,去噪处理包括如下步骤:首先对每一道光纤数据进行主频分析,然后根据主频分析结果对光纤数据进行滤波处理,最后叠加各道滤波后的光纤数据,能大大提升信噪比。
步骤五、每隔一定时间在水岸边发射激发信号,重复步骤三和四,测出感知元件所在位置处水下沉积物-水分界面位置和沉积物类型,并与之前的测量结果进行对比,得到水下沉积物-水分界面位置的升降情况及沉积物类型的变化情况,进而实现对海床、河床或湖床冲刷及淤积的长期监测,并判断出冲刷或淤积的沉积物类型及厚度。
实施例2:
一种基于分布式声波传感技术的水下沉积物沉积特性测量装置,包括感知元件1、分布式声波传感解调仪2、计算机3、信号发射器4、脉冲振动器5和光纤引线6;分布式声波传感解调仪2的一端通过信号传输线7与计算机3相连,另一端通过光纤引线6与感知元件1相连;所述感知元件1包括标杆1-1和应变感测光纤1-2,标杆1-1是一根截面为圆形的细长杆,作为本发明的优选实施例,该标杆选用铝合金杆,杆的长度为1.5m,半径为2cm,标杆1-1表面刻有一段笔直的槽,槽的方向与标杆1-1的轴线方向平行,槽的截面为三角形,槽的深度为2-4mm,将应变感测光纤1-2放入槽内,并用环氧树脂将其固定在槽内;光纤引线6通过熔接的方式与应变感测光纤1-2相连;所述脉冲振动器5包括三个模块:信号接收模块5-1、脉冲振动模块5-2和电源模块5-3;三个模块通过电路连接,电源模块5-3负责给其他模块供电,当信号接收模块5-1接收到信号发射器传4来的发射信号后,脉冲振动模块5-2随即产生脉冲振动,使感知元件1发生振动。
本实施例提供的基于分布式声波传感技术的水下沉积物沉积特性测量方法,包括如下步骤:
步骤一、连接所述测量装置并进行室内标定实验,通过小型敲击试验,确定每一道光纤记录对应的感知元件1的位置,将每一道光纤记录的道号以及道号对应的感知元件1的位置记录下来;之后将感知元件1垂直插入室内模型箱8中,不断改变水下沉积物8-2的类型和感知元件1插入深度,并通过脉冲振动器5让感知元件1振动,得到若干感知元件1振动的频率数据。本实例中,室内模型箱8包括一个长×宽×高为100cm×60cm×130cm的长方体水箱8-1、水下沉积物8-2和水8-3,将得到的振动频率数据进行可视化处理,得到感知元件1的振动频率与水下沉积物8-2类型的经验关系曲线,具体如图4所示;
步骤三、进行现场试验,将测量装置中的感知元件1垂直插入河床某个待测位置,待装置稳定后,在水岸边用信号发射器4向脉冲振动器5发射激发信号,分布式声波传感解调仪2采集并记录感知元件1振动时的应变数据;
步骤四、运用计算机软件提取步骤三中分布式声波传感解调仪2记录的数据,按照从感知元件1的顶部到底部的顺序对记录的光纤数据进行排列,对比感知元件1各个位置的光纤数据,发现距离感知元件顶部100cm的位置,光纤记录的数据在各个时间点上的应变均最大,判断该位置为水下沉积物-湖水分界面位置,此结果与现场实际情况基本吻合;
步骤五、对记录的应变数据进行去噪处理,即首先对每一道光纤数据进行主频分析,之后根据主频分析结果对各道的光纤数据进行滤波处理,最后叠加滤波后的数据,对叠加后的数据进行快速傅里叶变换,用峰值提取法提取出感知元件1的振动频率f
步骤六、4周后,再次在水岸边向脉冲振动器发射激发信号,重复步骤三至五,发现距离感知元件顶部80cm的位置,感知元件的应变最大,判断该位置为水下沉积物-湖水分界面位置,此结果与现场实际情况基本吻合,感知元件的振动频率f
以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
- 一种基于分布式声波传感技术的水下沉积物沉积特性测量装置与方法
- 基于LIBS技术的便携式水下沉积物、岩石成分检测装置