一种超视距感知、算力共享型ADAS控制器系统
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及车载电子领域,特别涉及一种超视距感知、算力共享型ADAS控制器系统。
背景技术
电动化、智能化、网联化、共享化是国际汽车产业不可逆转的新四化趋势,智能网联是传统汽车工业(汽车电子及机械技术)与新科技(AI、通讯、大数据、云计算)深度融合的巨大机遇。智能网联汽车具备强烈本地属性,中国已经形成渐进式、单车智能+车路协同的技术路线。智能网联汽车关乎国家信息安全与产业战略安全,ADAS作为产业链核心是自主可控的安全刚需。
ADAS对车辆安全性的价值得到交通监管部门认可,FCW、AEB等功能已经强制实施,LDW即将强制实施,LKA、BSD、DMS等预计在2022年前强制实施。从实施情况看,目前的ADAS产品有助于避免交通事故,但还存在适应性、用户体验等问题,预计监管部门将从标准、测试等方面促进ADAS产品完善。
目前ADAS产品存在用户体验差的问题,关键原因是智能化程度低。因此,ADAS的发展趋势是向智能化迈进,引入融合感知、深度学习、协同控制、高精度地图、车联网等更先进的技术,使得感知更准确、控制更及时、功能更丰富、用户更接受,大幅提升ADAS的客户价值。
发明内容
本发明目的是:提供一种超视距感知、算力共享型ADAS控制器系统,结合高精度地图,实现预测式巡航及拥堵辅助,彻底解放司机双脚,同时降低油耗,显著提升用户接受度。结合驾驶员状态感知系统,根据场景、驾驶员状态动态调整系统,有效提升ADAS有效性和用户体验。提出“边缘互联、算力共享”的设计架构,借助车机算力,提升计算性能,解决运行高级决策控制算法算力不足的难题。
本发明的技术方案是:
一种超视距感知、算力共享型ADAS控制器系统、包括:一个地图控制器、两个卫星导航天线、一个驾驶员监控系统、一个前向摄像头模块、一个毫米波雷达、一个车机和一个ADAS中央控制器,其中:
两个卫星导航天线连接到地图控制器上,前向摄像头模块、毫米波雷达、驾驶员监控系统分别处理各自的监控结果,并将结果通过CAN总线发送至ADAS中央控制器;地图控制器连接到车机上;ADAS中央控制器和车机之间设有互联总线,用于两者之间的数据交互。
优选的,所述ADAS中央控制器上运行运行包括PID控制算法在内的较简单控制算法,同时通过互联总线,将需要计算的数据输入发送至车机,车机上运行包括LQR、MPC算法在内的较复杂算法,解决ADAS中央控制器算力不足问题,且不增加硬件成本。
优选的,所述两个卫星导航天线结合地图控制器组成地图单元,提供亚米级定位及超视距的行车环境信息,根据获取的前方预期道路结构及曲率信息,监督摄像头模块对车道线及可行驶区域的感知结果和ADAS控制策略,形成安全冗余;根据前方预期道路的坡度信息,指导ADAS对油门和刹车的控制策略,降低油耗。
优选的,所述驾驶员监控系统对驾驶员状态检测的结果与ADAS中央控制器的控制策略结合起来,结合驾驶员状态感知系统,根据场景、驾驶员状态动态调整系统,提升ADAS有效性和用户体验。
优选的,所述ADAS中央控制器和车机之间的互联总线为十兆或百兆网络,以满足低延时数据传输需求。
优选的,所述ADAS中央控制器的主控芯片采用单片机,车机采用应用处理器。
本发明的优点是:
1.本发明提出的超视距感知、算力共享型ADAS控制器系统,结合高精度地图,实现预测式巡航及拥堵辅助,彻底解放司机双脚,同时降低油耗,显著提升用户接受度。
2.本发明的ADAS中央控制器和车机之间设有高速互联总线,用于两者之间的数据交互。本发明提出一种“边缘互联、算力共享”的架构,借助车机算力,可运行算力要求更强的决策控制算法,解决ADAS中央控制器算力不足问题,同时不增加系统成本。
3.本发明采用高精度地图提供亚米级定位及超视距的行车环境信息。在感知上提供先验信息,用于补充前向摄像头模块感知不足,提高安全性。另外,高精度地图单元为预测式巡航控制技术提供支撑,导入坡度等信息,提升驾驶经济性。
4.本发明提出将驾驶员监控系统对驾驶员状态检测的结果与ADAS中央控制器的控制策略结合起来,结合驾驶员状态感知系统,根据场景、驾驶员状态动态调整系统,有效提升ADAS有效性和用户体验。
附图说明
下面结合附图及实施例对本发明作进一步描述:
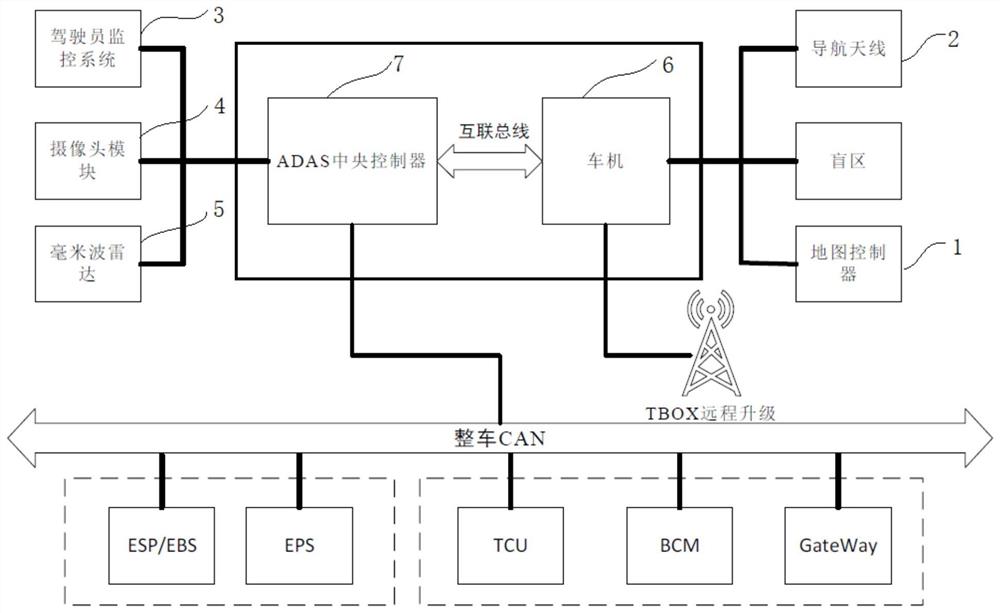
图1为本发明的超视距感知、算力共享型ADAS控制器系统总线连接图。
图2为本发明的超视距感知、算力共享型ADAS控制器系统算力共享架构数据交互示意图。
具体实施方式
如图1所示,本发明的超视距感知、算力共享型ADAS控制器系统,包括:一个高精度地图控制器1,两个GPS天线2,一个驾驶员监控系统3,一个前向摄像头模块4,一个毫米波雷达5,一个车机6和一个ADAS中央控制器7。所述两个GPS天线2连接到高精度地图控制器1上,前向摄像头模块4、毫米波雷达5、驾驶员监控系统3分别处理各自的结果,并将结果通过CAN总线发送至ADAS中央控制器7;高精度地图控制器1连接到车机6上;ADAS中央控制器7和车机6之间设有高速互联总线,用于两者之间的数据交互。
所述ADAS中央控制器7和车机6之间设有高速互联总线,用于两者之间的数据交互。高速互联总线可以是十兆或百兆网络,以满足延时<10ms数据传输需求。为达到足够的可靠性,ADAS中央控制器7的主控多为单片机,主频<300MHz,车机6多采用应用处理器,主频>1GHz,算力强。如图2所示,本发明提出一种“边缘互联、算力共享”的架构,在ADAS中央控制器的主控单片机上运行简单的控制算法,如PID(proportion integral derivative)控制算法,同时通过互联总线,将需要计算的数据输入发送至车机端,运行控制效果更好的LQR(linear quadratic regulator)和MPC(Model Predictive Control)算法,解决算力不足问题,同时不增加系统成本。
所述两个GPS天线2结合高精度地图控制器1组成高精度地图单元,高精度地图可提供亚米级定位及超视距的行车环境信息。在感知上用于补充前向摄像头模块4和毫米波雷达5的不足,并形成安全冗余。如车道保持功能依赖的车道线检测一般由唯一的前向摄像头模块4提供,当摄像头检测结果出错时,可能会导致车辆误动作,引发危险,在本发明中,高精度地图单元提供当前道路曲率先验信息,对摄像头检测结果是个良好的补充。在决策控制上,高精度地图单元为PCC(Predictive Eco-Cruise Control)预测式巡航控制技术提供支撑,导入坡度等信息,在定速巡航系统基础上,提升驾驶经济性。
本发明提出将驾驶员监控系统3对驾驶员状态检测的结果与ADAS中央控制器7的控制策略结合起来,结合驾驶员状态感知系统,根据场景、驾驶员状态动态调整系统,有效提升ADAS有效性和用户体验。当驾驶员疲劳或注意力分散时,采用更保守的控制策略,以防止紧急情况下驾驶员无法及时接管;当驾驶员注意力集中时,采用更舒适的控制策略增加驾驶体验感。
上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明主要技术方案的精神实质所做的修饰,都应涵盖在本发明的保护范围之内。
- 一种超视距感知、算力共享型ADAS控制器系统
- ADAS与V2V结合的超视距感知与发布方法及系统