一种移动DR机器人智能小车及其控制方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及智能小车的技术领域,具体涉及一种移动DR机器人智能小车及其控制方法。
背景技术
随着科技的发展,机器人在我们的生活中应用越来越广泛,其中随着医疗水平的发展,医院开始普遍使用DR机器人,传统的DR机器人多为固定在一个位置,无法根据需求进行移动提供检测服务,需要进行多台DR机器人的配备,增加配备成本,便利性较低,当固定式DR机器人因故障出现问题,需要进行另一台DR机器人的寻找使用,且DR机器人维护人员需要去往故障的DR机器人位置进行维护,延长设备维护时间,从而给医院的操作人员使用带来一定的困境,所以人们发明一种移动小车,用于搭载DR机器人,但现有的移动小车移动精度较差,且规避效果差,容易出现碰撞的情况,导致移动小车或DR机器人出现损坏,影响使用,且现有的移动小车的工作状态无法直观的反馈给使用者,容易存在运动异常无法及时进行排除及维护,影响使用者的用户体验效果,且现有的移动小车多为只能安装规定规格的DR机器人,无法搭载其它规格的DR机器人,适用性低,现有的移动小车还存在着一定的运动隐患,容易因故障无法及时停止,造成移动小车或DR机器人出现损坏,且对人身安全造成一定威胁。
发明内容
本项发明是针对现在的技术不足,提供一种移动DR机器人智能小车。
本发明还提供一种控制方法。
本发明为实现上述目的所采用的技术方案是:
一种移动DR机器人智能小车,所述移动DR机器人智能小车包括搭载平台及移动设备,所述搭载平台设置在所述移动设备上方,所述搭载平台包括箱体及顶板,所述箱体内设有线端连接组件,所述顶板设有顶舱一及顶舱二,所述顶舱一设有接线端口一,所述顶舱二设有接线端口二,所述顶舱一及顶舱二均设有盖板,所述顶板边缘设有防护胶圈,所述顶板设有多组安装孔组,所述箱体还设有信号提示组件、多个紧急按钮、控制组件及状态灯带组件,所述移动设备包括箱体一、移动驱动组件、检测组件、控制模块及相机组件,所述箱体一设有前舱、中间舱、后舱及两侧舱,所述前舱设有前盖板,所述后舱设有后盖板,两所述侧舱均设有侧盖板,所述前盖板及后盖板均设有快速打开结构,两所述侧盖板均设有固定螺钉。
作进一步改进,多组所述安装孔组包括安装孔组一、安装孔组二及安装孔组三,多个所述紧急按钮分别设置在所述箱体的两侧,所述信号提示组件包括八个信号灯,八个所述信号灯两个一组分别设置在所述箱体的角落边侧,所述控制组件设置在所述箱体的角部边缘,所述控制组件包括控制面板,所述控制面板设有工作模式钥匙开关、停止按钮、重启按钮及开关按钮,所述控制组件与所述控制模块连接,所述接线端口一设有以太网接口、GPIO接口及功率接口,所述接线端口一用于连接设置在顶板上的DR机器人,所述接线端口二设有辅助紧急停止接口及辅助安全功能接口,所述接线端口二用于访问安全接口的辅助安全功能和辅助紧急停止。
作进一步改进,所述移动驱动组件包括电源驱动模块、两驱动轮及多个滚轮,两所述驱动轮分别设置在两所述侧舱内,所述驱动轮均设有驱动马达,多个所述滚轮分别设置在所述箱体一底部的四个角部,所述电源驱动模块设置在所述后舱内,所述电源驱动模块包括主电源、接近传感器连接器、电池断开开关、状态灯带连接器、制动器释放按钮、充电接口、MiR控制器的连接接口及电源控制板,所述驱动轮均设有制动器,所述制动器与所述制动器释放按钮连接。
作进一步改进,所述检测组件包括八个接近传感器、前部安全激光扫描仪及后部安全激光扫描仪,八个所述接近传感器均与所述接近传感器连接器连接,八个所述接近传感器分别设置在所述箱体一的四个面外侧,所述前部安全激光扫描仪与后部安全激光扫描仪对角设置在所述箱体一前面的角落上方及后面的角落上方,所述前部安全激光扫描仪及后部安全激光扫描仪构成360°完整扫描视野。
作进一步改进,所述控制模块与相机组件设置在所述前舱内,所述相机组件设置在所述前舱的前端,所述相机组件包括两3D相机,所述前盖板设有3D相机检测窗口,所述控制模块包括电缆拖链、安装扭矩关断接触器、路由器、机器人电脑、蜂鸣器、喇叭、电源板、电机控制器及安全PLC,所述电源板用于控制电机控制器、机器人电脑和安全PLC的配电,从而保护移动DR机器人智能小车的使用稳定。
作进一步改进,所述快速打开结构为带弹簧扭转开关,所述前部安全激光扫描仪及后部安全激光扫描仪均设有有源光电漫反射防护器件,所述前部安全激光扫描仪及后部安全激光扫描仪的扫描范围为270°。
作进一步改进,所述中间舱设有内部传感器组件,所述内部传感器组件包括陀螺仪、电机编码器、加速计及车轮编码器。
作进一步改进,所述状态灯带组件包括多条灯带,多条所述灯带分别设置在所箱体底部边缘。
一种实施移动DR机器人智能小车的控制方法,其特征在于,其包括以下步骤:
(1)模式选择:通过控制工作模式钥匙开关进行工作模式选择,向左扭为自主模式,移动DR机器人智能小车至于自主模式;向右扭为手动模式,移动DR机器人智能小车至于手动模式,模式选择完毕后按下开关按钮启动移动DR机器人智能小车动作;
(2)第一次运动观察及运行:所述前部安全激光扫描仪及后部安全激光扫描仪进行移动DR机器人智能小车的前方及后方进行扫描,将扫描后的数据采用粒子滤波算法考虑和权衡观察到的物体,规划第一次运行路线;
(3)第二次运动观察及运行:所述3D相机对前方高度950mm-1700mm、114°水平范围进行扫描规划第二次运行路线;
(4)路线数据整理及处理:将第一次运行路线及第二次运行路线进行结合处理,规划处运行方向及路线;
(5)移动DR机器人智能小车运行移动:移动驱动组件驱动移动DR机器人智能小车移动,并且所述前部安全激光扫描仪、后部安全激光扫描仪、相机组件、接近传感器及内部传感器组件对移动DR机器人智能小车的实时移动的环形数据进行继续扫描及收集处理,实现实时移动运行。
本发明的有益效果:本发明通过设置多组不同规格的安装通孔组使得搭载平台可用于不同规格的DR机器人的固定及放置,提高移动DR机器人智能小车的适用性,降低配备成本;通过设置状态灯带组件及信号提示组件构成双重提示结构,使得移动DR机器人智能小车的工作状态快速直观的反馈给人们,从而提高提示效果;通过设置相机组件及检测组件便于实现全方位移动视野的收集,从而提高避规效果,保证移动运行的稳定及快捷;通过设置快速打开结构便于前盖板及后盖板的开始打开,从而对前舱或后舱内的元件进行维护或更换,提高维护效率;通过设置工作模式钥匙开关可用于自主运动模式或手动模式的快速切换,并且通过设置多个紧急按钮提供紧急停止,缩短寻找急停按钮的时间,从而便于人员快速找到急停按钮进行急停操作,防止因寻找急停按钮造成的威胁,提高保护性能。
下面结合附图与具体实施方式,对本发明进一步说明。
附图说明
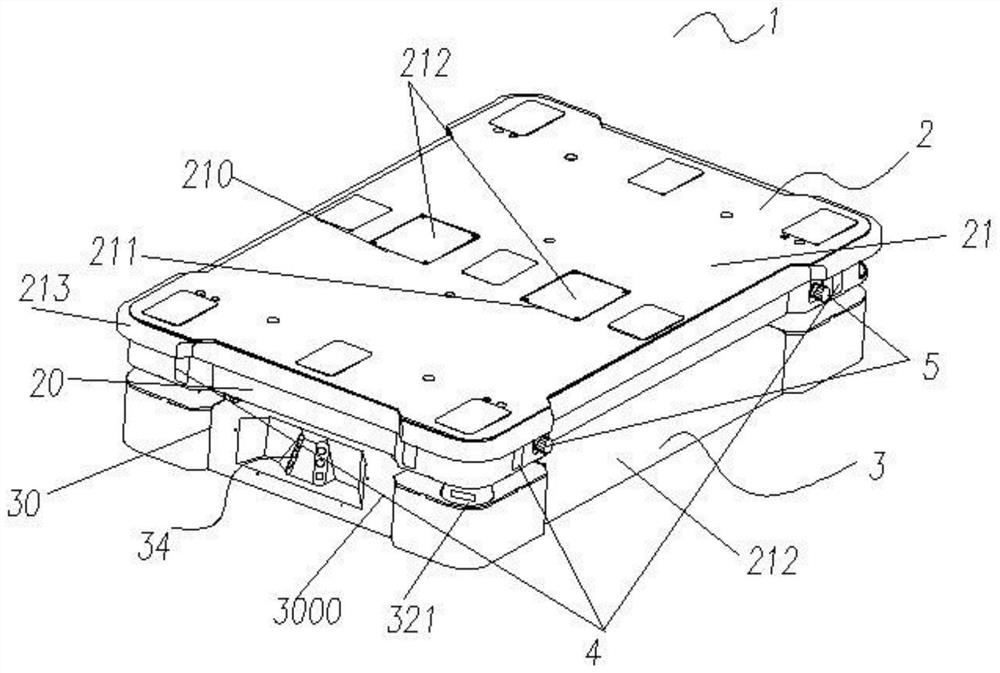
图1为本实施例的移动DR机器人智能小车整体结构示意图;
图2为本实施例的搭载平台俯视示意图;
图3为本实施例的移动DR机器人智能小车正视示意图;
图4为本实施例的图3中的剖视示意图。
图中:1.移动DR机器人智能小车,2.搭载平台,3.移动设备,20.箱体,21.顶板,210.顶舱一,211.顶舱二,2100.接线端口一,2110.接线端口二,212.盖板,213.防护胶圈,214.安装孔组,4.信号提示组件,5.紧急按钮,6.控制组件,7.状态灯带组件,30.箱体一,31.移动驱动组件,32.检测组件,33.控制模块,34.相机组件,300.前舱,301.中间舱,302.后舱,303.侧舱,3000.前盖板,3020.后盖板,3030.侧盖板,8.快速打开结构,2140.安装孔组一,2141.安装孔组二,2142.安装孔组三,60.控制面板,61.工作模式钥匙开关,62.停止按钮,63.重启按钮,64.开关按钮,21000.以太网接口,21001.GPIO接口,21002.功率接口,310.电源驱动模块,311.驱动轮,312.滚轮,3100.主电源,3101,接近传感器连接器,3102.电源断开开关,3103.状态灯带连接器,3104.制动器释放按钮,3105.充电接口,3106.MiR控制器的连接接口,3107.电源控制板,320.接近传感器,321.前部安全激光扫面议,322.后部安全激光扫描器,330.电缆拖链,331.安装扭矩关断接触器,332.路由器,333.机器人电脑,334.蜂鸣器,335.喇叭,336.电源板,337.电机控制器,338.安全PLC,3010.内部传感器组件,3011.陀螺仪,3012.电机编码器,3013.加速计,3014.车轮编码器。
具体实施方式
以下所述仅为本发明的较佳实施例,并不因此而限定本发明的保护范围。
实施例,参见附图1~图4,一种移动DR机器人智能小车1包括搭载平台2及移动设备3,所述搭载平台2设置在所述移动设备3上方,所述搭载平台2包括箱体20及顶板21,所述箱体20内设有线端连接组件,所述顶板21设有顶舱一210及顶舱二211,所述顶舱一210设有接线端口一2100,所述顶舱二211设有接线端口二2110,所述顶舱一210及顶舱二211均设有盖板212,所述顶板21边缘设有防护胶圈213,所述防护胶圈213起防撞保护作用,所述顶板21设有多组安装孔组214,所述箱体20还设有信号提示组件4、多个紧急按钮5、控制组件6及状态灯带组件7,所述状态灯带组件7用于起提示作用,从而便于快速观察移动DR机器人智能小车1的运行状态,所述移动设备3包括箱体一30、移动驱动组件31、检测组件32、控制模块33及相机组件34,所述箱体一30设有前舱300、中间舱301、后舱302及两侧舱303,所述前舱300设有前盖板3000,所述后舱302设有后盖板3020,两所述侧舱303均设有侧盖板3030,所述前盖板3000及后盖板3020均设有快速打开结构8,两所述侧盖板3030均设有固定螺钉,所述快速打开结构8便于前盖板3000及后盖板3020的开始打开,从而对前舱300或后舱302内的元件进行维护或更换,提高维护效率。
多组所述安装孔组214包括安装孔组一2140、安装孔组二2141及安装孔组三2142,所述安装孔组一2140用于顶板21的安装固定在所述箱体20上,所述安装孔组二2141用于搬运时的吊环安装或用于安装顶部DR机器人,所述安装孔组三2142用于DR机器人的安装固定,多个所述紧急按钮5分别设置在所述箱体20的两侧,设置多个紧急按钮5用于提供紧急停止,缩短寻找急停按钮5的时间,从而便于人员快速找到急停按钮5进行急停操作,防止因寻找急停按钮5造成的威胁,所述信号提示组件4包括八个信号灯,八个所述信号灯两个一组分别设置在所述箱体20的角落边侧,所述信号提示组件4用于提供信号提示作用,结合状态灯带组件7构成双重信号提示,从而提高提示效果,便于观察移动DR机器人智能小车1的运行状态,所述控制组件6设置在所述箱体20的角部边缘,所述控制组件6包括控制面板60,所述控制面板60设有工作模式钥匙开关61、停止按钮62、重启按钮63及开关按钮64,所述控制组件6与所述控制模块33连接,所述接线端口一2100设有以太网接口21000、GPIO接口21001及功率接口21002,所述接线端口一2100用于连接设置在顶板21上的DR机器人,所述接线端口二2110设有辅助紧急停止接口21100及辅助安全功能接口21101,所述接线端口二2110用于访问安全接口的辅助安全功能和辅助紧急停止。
所述移动驱动组件31包括电源驱动模块310、两驱动轮311及多个滚轮312,两所述驱动轮311分别设置在两所述侧舱303内,所述驱动轮311均设有驱动马达,多个所述滚轮312分别设置在所述箱体一30底部的四个角部,所述电源驱动模块310设置在所述后舱302内,所述电源驱动模块310包括主电源3100、接近传感器连接器3101、电池断开开关3102、状态灯带连接器3103、制动器释放按钮3104、充电接口3105、MiR控制器的连接接口3106及电源控制板3107,所述驱动轮311均设有制动器,所述制动器与所述制动器释放按钮连接,所述移动驱动组件31用于驱动移动DR机器人智能小车1移动。
所述检测组件32包括八个接近传感器320、前部安全激光扫描仪321及后部安全激光扫描仪322,八个所述接近传感器320均与所述接近传感器连接器3101连接,八个所述接近传感器320分别设置在所述箱体一30的四个面外侧,所述前部安全激光扫描仪321与后部安全激光扫描仪322对角设置在所述箱体一30前面的角落上方及后面的角落上方,所述前部安全激光扫描仪321及后部安全激光扫描仪322构成360°完整扫描视野。
所述控制模块33与相机组件34设置在所述前舱300内,所述相机组件34设置在所述前舱300的前端,所述相机组件34包括两3D相机,所述前盖板3000设有3D相机检测窗口,所述控制模块33包括电缆拖链330、安装扭矩关断接触器331、路由器332、机器人电脑333、蜂鸣器334、喇叭335、电源板336、电机控制器337及安全PLC338,所述电源板336用于控制电机控制器337、机器人电脑333和安全PLC338的配电,从而保护移动DR机器人智能小车1的使用稳定。
所述快速打开结构8为带弹簧扭转开关,所述前部安全激光扫描仪321及后部安全激光扫描仪322均设有有源光电漫反射防护器件,所述前部安全激光扫描仪321及后部安全激光扫描仪322的扫描范围为270°,提高扫描范围,从而提高防撞及避规效果。
所述中间舱301设有内部传感器组件3010,所述内部传感器组件3010包括陀螺仪3011、电机编码器3012、加速计3013及车轮编码器3014,所述陀螺仪3011用于测量移动DR机器人智能小车1的方向和角速度,所述电机编码器3012用于跟踪电机轴与速度或位置,以提供闭环反馈信号,所述加速计用于测量非中立加速度,所述车辆编码器3014用于检测车轮运动。
所述状态灯带组件7包括多条灯带,多条所述灯带分别设置在所箱体20底部边缘。
一种实施移动DR机器人智能小车1的控制方法,其特征在于,其包括以下步骤:
(1)模式选择:通过控制工作模式钥匙开关61进行工作模式选择,向左扭为自主模式,移动DR机器人智能小车1至于自主模式;向右扭为手动模式,移动DR机器人智能小车1至于手动模式,模式选择完毕后按下开关按钮64启动移动DR机器人智能小车1动作;
(2)第一次运动观察及运行:所述前部安全激光扫描仪321及后部安全激光扫描仪322进行移动DR机器人智能小车1的前方及后方进行扫描,将扫描后的数据采用粒子滤波算法考虑和权衡观察到的物体,规划第一次运行路线;
(3)第二次运动观察及运行:所述3D相机对前方高度950mm-1700mm、114°水平范围进行扫描规划第二次运行路线;
(4)路线数据整理及处理:将第一次运行路线及第二次运行路线进行结合处理,规划处运行方向及路线;
(5)移动DR机器人智能小车1运行移动:移动驱动组件31驱动移动DR机器人智能小车1移动,并且所述前部安全激光扫描仪321、后部安全激光扫描仪322、相机组件34、接近传感器320及内部传感器组件3010对移动DR机器人智能小车1的实时移动的环形数据进行继续扫描及收集处理,实现实时移动运行。
本发明通过设置多组不同规格的安装通孔组使得搭载平台可用于不同规格的DR机器人的固定及放置,提高移动DR机器人智能小车的适用性,降低配备成本;通过设置状态灯带组件及信号提示组件构成双重提示结构,使得移动DR机器人智能小车的工作状态快速直观的反馈给人们,从而提高提示效果;通过设置相机组件及检测组件便于实现全方位移动视野的收集,从而提高避规效果,保证移动运行的稳定及快捷;通过设置快速打开结构便于前盖板及后盖板的开始打开,从而对前舱或后舱内的元件进行维护或更换,提高维护效率;通过设置工作模式钥匙开关可用于自主运动模式或手动模式的快速切换,并且通过设置多个紧急按钮提供紧急停止,缩短寻找急停按钮的时间,从而便于人员快速找到急停按钮进行急停操作,防止因寻找急停按钮造成的威胁,提高保护性能。
本发明并不限于上述实施方式,采用与本发明上述实施例相同或近似结构或装置,而得到的其他用于移动DR机器人智能小车及其控制方法,均在本发明的保护范围之内。
- 一种移动DR机器人智能小车及其控制方法
- 一种基于android平台的移动机器人远程控制方法