一种四边锯工作台及四边锯
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及板材切割装置技术领域,具体是涉及一种四边锯工作台及四边锯。
背景技术
在建筑板材的加工过程中,需要对板材进行四边定尺规方的加工工序,市场上常使用四边锯完成。目前,四边锯的上料过程需要工作人员将板材抬放到工作台上,并对板材进行位置校正调节,不仅增加了人力成本,长时间重复搬运操作,对工作人员体力消耗较大,进而在操作过程中可能存在一定的安全隐患,而且自动化程度低,不利于连续加工,生产效率低。
发明内容
本发明要解决的技术问题是克服现有技术存在的不足,提供一种能够自动将板材输送至工作台上并进行位置校正,自动化程度高,连续加工能力强的四边锯工作台及四边锯。
为解决上述技术问题,本发明采用以下技术方案:
一种四边锯工作台,包括机架、设置于所述机架上的固定台和设置于所述机架上的活动台,所述固定台和所述活动台均包括主台体,所述固定台和所述活动台的主台体上均安装有用于吸附板材的真空吸盘、用于输送板材的输送机构、用于定位板材的夹持机构和用于切割板材的切割机构,所述输送机构以可升降方式安装在所述主台体上,并能通过升降动作将板材放置到真空吸盘和将真空吸盘上的板材抬升至真空吸盘上方;所述夹持机构以可升降方式安装在所述主台体上,并能通过升降动作对真空吸盘上的板材进行夹持定位和将夹持机构降至板材下方。
作为上述技术方案的进一步改进:
所述输送机构通过多组第一升降机构连接于所述主台体上,所述第一升降机构包括第一气缸,所述第一气缸的缸体与所述主台体固定连接,所述第一气缸的缸杆与所述输送机构固定连接。
所述输送机构包括驱动电机、主动轮、从动轮、围绕所述主动轮和所述从动轮设置的输送带以及连接板,所述主动轮和所述从动轮以可转动方式连接于所述连接板上,所述主动轮与所述驱动电机动力连接,所述连接板与所述第一气缸的缸杆固定连接。
所述夹持机构包括对向设置的第一夹持部和第二夹持部,所述第一夹持部通过第二升降机构连接于所述主台体上,所述第二升降机构包括第二气缸,所述第二气缸的缸体与所述主台体固定连接,所述第二气缸的缸杆与所述第一夹持部固定连接;所述第二夹持部通过多组第三升降机构连接于所述主台体上,所述第三升降机构包括第三气缸,所述第三气缸的缸体与所述主台体固定连接,所述第三气缸的缸杆与所述第二夹持部固定连接。
所述第一夹持部包括第一夹块和驱动所述第一夹块往复移动的伸缩气缸,所述伸缩气缸的缸体与所述第二气缸的缸杆固定连接,所述伸缩气缸的缸杆与所述第一夹块固定连接。
所述第二夹持部包括第二夹块和驱动所述第二夹块往复移动的丝杆副,所述丝杆副与所述第三气缸的缸杆固定连接。
所述活动台通过第一滑动机构连接在所述机架上,所述第一滑动机构包括第一滑轨和第一滑块,所述第一滑块滑接于所述第一滑轨上,所述活动台固定连接于所述第一滑块上。
所述机架上安装有用于驱动所述活动台沿所述第一滑轨往复移动的第一驱动机构,所述第一驱动机构包括主动力气缸,所述主动力气缸的缸体与所述机架固定连接,所述主动力气缸的缸杆与所述活动台固定连接。
一种四边锯,包括上述任一项的四边锯工作台。
与现有技术相比,本发明的优点在于:
本发明的四边锯工作台通过将输送机构以可升降方式安装在主台体上,进行板材卸料时,输送机构通过抬升动作将真空吸盘上的板材抬升至真空吸盘上方并输送出工作台完成卸料,进行板材上料时,输送机构将板材输送进工作台并通过下降动作将板材放置到真空吸盘完成上料;通过将夹持机构以可升降方式安装在主台体上,板材上料完成后,夹持机构通过抬升动作上升至板材侧部并对板材两侧进行夹持,实现位置校正,板材进行卸料前,夹持机构解除夹持状态并下降至板材下方,实现了自动将板材输送至工作台上并进行位置校正,自动化程度高,连续加工能力强,生产效率高。
本发明的四边锯通过上述四边锯工作台的输送机构完成板材的自动上料和夹持机构完成板材的位置校正后,对板材进行四边切割,无需人工进行上下料及位置校正,降低了生产过程中的安全隐患,有效提高生产效率。
附图说明
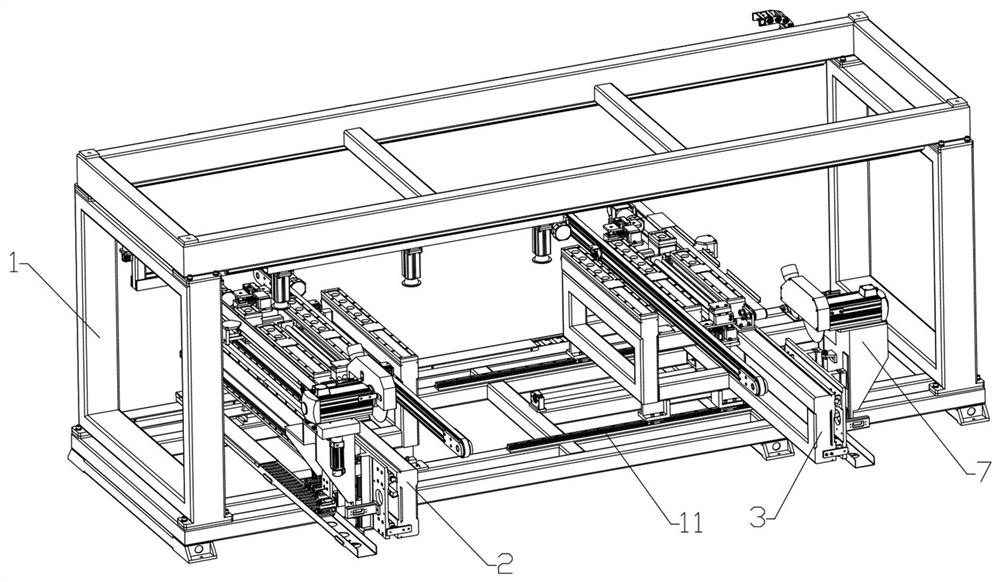
图1为本发明的整机装配结构示意图。
图2为本发明提供的固定台的结构示意图。
图3为本发明提供的活动台的连接结构示意图。
图4为本发明提供的输送机构的结构示意图。
图5为本发明提供的夹持机构的结构示意图。
图例说明:
1、机架;2、固定台;3、活动台;4、真空吸盘;5、输送机构;51、驱动电机;52、从动轮;53、输送带;54、连接板;6、夹持机构;61、第一夹持部;611、第一夹块;612、伸缩气缸;62、第二夹持部;621、第二夹块;622、丝杆副;7、切割机构;8、第一升降机构;81、第一气缸;9、第二升降机构;91、第二气缸;10、第三升降机构;101、第三气缸;11、第一滑动机构;111、第一滑轨;12、第一驱动机构;121、主动力气缸。
具体实施方式
以下结合附图和具体实施例对本发明作进一步详细说明。
如图1至图5所示,本实施例的四边锯工作台,包括机架1、设置于机架1上的固定台2和设置于机架1上的活动台3,固定台2和活动台3均包括主台体,固定台2和活动台3的主台体上均安装有用于吸附板材的真空吸盘4、用于输送板材的输送机构5、用于定位板材的夹持机构6和用于切割板材的切割机构7,输送机构5以可升降方式安装在主台体上,并能通过升降动作将板材放置到真空吸盘4和将真空吸盘4上的板材抬升至真空吸盘4上方;夹持机构6以可升降方式安装在主台体上,并能通过升降动作对真空吸盘4上的板材进行夹持定位和将夹持机构6降至板材下方。该四边锯工作台通过将输送机构5以可升降方式安装在主台体上,进行板材卸料时,输送机构5通过抬升动作将真空吸盘4上的板材抬升至真空吸盘4上方并输送出工作台完成卸料,进行板材上料时,输送机构5将板材输送进工作台并通过下降动作将板材放置到真空吸盘4完成上料;通过将夹持机构6以可升降方式安装在主台体上,板材上料完成后,夹持机构6通过抬升动作上升至板材侧部并对板材两侧进行夹持,实现位置校正,板材进行卸料前,夹持机构6解除夹持状态并下降至板材下方,实现了自动将板材输送至工作台上并进行位置校正,自动化程度高,连续加工能力强,生产效率高。
优选的,输送机构5通过多组第一升降机构8连接于主台体上,第一升降机构8包括第一气缸81,第一气缸81的缸体与主台体固定连接,第一气缸81的缸杆与输送机构5固定连接。该第一升降机构8采用气缸的形式,具有结构简单、可靠性高、使用寿命长的优点。
优选的,输送机构5包括驱动电机51、主动轮、从动轮52、围绕主动轮和从动轮52设置的输送带53以及连接板54,主动轮和从动轮52以可转动方式连接于连接板54上,主动轮与驱动电机51动力连接,连接板54与第一气缸81的缸杆固定连接。该输送机构5采用输送带形式,具有安装与拆卸过程简单快捷,便于维护,运行稳定的优点。
优选的,夹持机构6包括对向设置的第一夹持部61和第二夹持部62,第一夹持部61通过第二升降机构9连接于主台体上,第二升降机构9包括第二气缸91,第二气缸91的缸体与主台体固定连接,第二气缸91的缸杆与第一夹持部61固定连接;第二夹持部62通过多组第三升降机构10连接于主台体上,第三升降机构10包括第三气缸101,第三气缸101的缸体与主台体固定连接,第三气缸101的缸杆与第二夹持部62固定连接。该夹持机构6通过设置对向的第一夹持部61和第二夹持部62,能够从两侧对板材进行夹持定位,通过第一夹持部61与第二夹持部62之间的进度关系调节实现板材位置校正,取代了人工进行位置调整,安全系数高。
优选的,第一夹持部61包括第一夹块611和驱动第一夹块611往复移动的伸缩气缸612,伸缩气缸612的缸体与第二气缸91的缸杆固定连接,伸缩气缸612的缸杆与第一夹块611固定连接。
优选的,第二夹持部62包括第二夹块621和驱动第二夹块621往复移动的丝杆副622,丝杆副622与第三气缸101的缸杆固定连接。该第二夹持部62采用丝杆副622驱动第二夹块621往复移动的形式,一方面丝杆副的传动效率高,定位准确,另一方面丝杆副的调节范围较大,夹持不同宽度的板材时调节灵活,使用范围广。
优选的,活动台3通过第一滑动机构11连接在机架1上,第一滑动机构11包括第一滑轨111和第一滑块,第一滑块滑接于第一滑轨111上,活动台3固定连接于第一滑块上。该第一滑动机构11采用第一滑块与第一滑轨111滑接的形式,不仅结构简单、拆装方便快捷,而且运行稳定性好,可靠性高。
优选的,机架1上安装有用于驱动活动台3沿第一滑轨111往复移动的第一驱动机构12,第一驱动机构12包括主动力气缸121,主动力气缸121的缸体与机架1固定连接,主动力气缸121的缸杆与活动台3固定连接。该第一驱动机构12采用气缸的形式,具有结构简单、成本低、使用寿命长的优点。
实际应用过程中,四边锯工作台包括设置在机架1上的固定台2和设置在机架1上的活动台3,其中活动台3能够在机架1上沿待加工板材的长度方向往复移动,在进行板材上料工序前,根据待加工板材的长度不同,通过第一驱动机构12调整活动台3与固定台2之间的间距,目的在于保证分别安装在固定台2和活动台3上的各真空吸盘4、输送机构5、夹持机构6和切割机构7均能够与待加工板材接触并完成相应动作,满足多种不同长度板材的加工需求。
另一方面,本发明还提供一种四边锯,包括上述任一项的四边锯工作台。该四边锯通过上述四边锯工作台的输送机构5完成板材的自动上料和夹持机构6完成板材的位置校正后,对板材进行四边切割,无需人工进行上下料及位置校正,降低了生产过程中的安全隐患,有效提高生产效率。
上述四边锯工作台的固定台2和活动台3上的切割机构7用于分别对板材的两个短边进行切割,为实现对板材进行四边切割,四边锯还设置有两个长边切割机构(图中未示出),该长边切割机构能够在机架1上沿待加工板材的长度方向往复移动,实现对板材两侧长边的切割。上述长边切割机构及四边锯的其他结构均为现有技术,在此不再赘述。
本发明的四边锯对板材进行四边切割的工作过程如下:
先进行板材上料工序,多组第一升降机构8驱动输送机构5抬升至中空吸盘4上方,待加工板材通过人工抬放或机械爪抬放的方式置于输送机构5的输送带53上,固定台2和活动台3上的输送机构5共同对板材形成承托,驱动电机51驱动输送带53向机架1内输送的方向运转,实现板材的横向进料,当输送带53将板材输送至加工工位的上方(也即真空吸盘4的上方)时,驱动电机51停止动作,然后多组第一升降机构8驱动输送机构5作下降动作,将输送带53上的板材放置到真空吸盘4上,第二升降机构9和第三升降机构10同时动作,驱动对向设置的第一夹持部61和第二夹持部62抬升至真空吸盘4上方,固定台2和活动台3上的第一夹持部61共同与板材的一长边定位配合,固定台2和活动台3上的第二夹持部62共同与板材的另一长边定位配合,其中第一夹持部61通过伸缩气缸612的缩进动作以及第二夹持部62通过丝杆副622的移动动作共同实现板材的位置校正,板材位置校正完成后,真空吸盘4动作将板材吸附在固定台2和活动台3上,然后第二升降机构9和第三升降机构10同时动作,驱动第一夹持部61和第二夹持部62下降至真空吸盘4下方,以上为一次完整的板材上料工序;
然后进行板材切割工序,安装在固定台2和活动台3上的切割机构7能够沿待加工板材的宽度方向往复移动,实现对板材两端短边的切割,四边锯的长边切割机构能够在机架1上沿待加工板材的长度方向往复移动,实现对板材两侧长边的切割,切割机构7和长边切割机构共同完成板材的四边切割工序;
进行板材下料工序时,多组第一升降机构8驱动输送机构5作抬升动作,将真空吸盘4上的板材抬升至真空吸盘4上方,板材置于输送机构5的输送带53上,固定台2和活动台3上的输送机构5共同对板材形成承托,驱动电机51驱动输送带53向机架1外输送的方向运转,实现板材的横向出料,当输送带53将板材输送至机架1外时,驱动电机51停止动作,然后通过人手抬放或机械爪抬放的方式将输送带53上的板材卸料,以上为一次完整的板材下料工序。
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例。对于本技术领域的技术人员来说,在不脱离本发明技术构思前提下所得到的改进和变换也应视为本发明的保护范围。
- 一种四边锯工作台及四边锯
- 一种四边锯卸废料装置及四边锯