一种并联式彩超操作机器人末端执行器
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及医疗领域,具体是涉及一种并联式彩超操作机器人末端执行器。
背景技术
现有的彩超操作机器人通常采用串联式末端执行器,通过大工作空间和较高的可操作性提供了很大灵活性,但是使用大型机器人会给临床集成带来各种缺点;
超声扫描根据人体不同部位分为不同的区域,机器人系统只需要覆盖人体的一部分,这对于一个单独的程序,普通的机器人操作器在这种情况下会显得过大,对病人的安全构成威胁。对于彩超探头在紧贴人体表面时,需要发生的精细化运动,以及细微的位置、姿态调整,通过对大机械臂的控制进行调整是非常不便的;
现有的教授团队研究的3自由度末端执行器,为软机器人末端执行器,但是不具有主动调整角度贴合人体表面的功能。
发明内容
本发明要解决的技术问题是克服现有技术精细化和安全性均欠缺的缺陷,提供一种并联式彩超操作机器人末端执行器。
为解决上述技术问题,本发明提供以下技术方案:一种并联式彩超操作机器人末端执行器,包括定平台、动平台、舵机、舵机转臂、连接柱、上球铰、下球铰和彩超探头,
定平台,所述定平台为两块,两块的所述定平台之间留有夹层,所述定平台为正三角形形状,定平台的三边对称开设腰型通槽,定平台的中部开设圆形大通口,所述定平台的边角位置进行切削处理,所述定平台靠近切削位置对称开设螺纹孔;
动平台,所述定平台的下方平行设置定平台,所述定平台为一块,所述动平台为圆形形状,所述动平台上对称开设圆形小通口,所述动平台的中部斜向开设矩形通口;
舵机,所述定平台的夹层边沿对称固定安装舵机;
舵机转臂,所述舵机通过舵机齿盘固定安装舵机转臂,所述舵机转臂位于定平台的外侧,所述舵机转臂两端均为弧形状,所述舵机转臂与舵机齿盘连接的一端弧径长于另一端弧径;
连接柱,所述定平台与动平台之间安装连接柱,所述连接柱的数量与舵机的数量相同;
上球铰,所述舵机转臂另一端的外侧活动连接上球铰,所述上球铰与连接柱的上端固定连接;
下球铰,所述动平台的上方活动安装下球铰,所述下球铰与上球铰数量对应、位置交叉,所述下球铰与连接柱的下端固定连接;
彩超探头,所述动平台的矩形通口位置穿过彩超探头,所述彩超探头的本体中上部为矩形状,所述彩超探头的下端为曲线弧形状。
进一步的,所述动平台的上方固定安装倾角传感器,所述倾角传感器贴靠彩超探头安装。
进一步的,所述上球铰为弯杆型球头杆端关节铰链。
进一步的,所述下球铰为直杆型球头杆端关节铰链。
进一步的,所述彩超探头的上部安装在套盖内,所述套盖为矩形盖,套盖的下端端口与动平台的矩形通口固定连通,所述套盖的顶部安装位移传感器,所述套盖顶部中间开设通孔、顶部侧边开设穿孔,所述彩超探头的顶部垂直固定安装竖杆,所述竖杆穿过套盖的通孔,所述套盖内部安装弹簧,所述弹簧的两端分别与彩超探头的顶部、套盖的顶部固定连接,所述位移传感器通过连接片与套盖边侧固定连接,所述位移传感器上设有辅件,所述辅件插入套盖的穿孔。
进一步的,所述连接柱的两端设有外螺纹。
本发明与现有技术相比具有的有益效果是:
1、采用并联机构,相比于串联机构提高空间利用率,缩小了机械臂的运动空间,减小对医院房间的空间要求;
2、舵机驱动代替原有的伺服电机配电动推杆的方式,实现轻量化设计,减小对机械臂的负载,机构更加轻巧,降低了成本,符合绿色设计理念;
3、基于机械臂的基础定位,6自由度末端执行器只进行精细化定位调整姿态,减小对机械臂的控制要求和硬件要求,同时6自由度末端执行器的定位可以实现比彩超探头直接连接机械臂定位更加精确的姿态,从而呈现更清晰准确的彩超影像;
4、通过弹簧及位移传感器,可以实时获得病人身体部位的受力情况,提高了安全性。
附图说明
图1为本发明角度一示意图;
图2为本发明角度二示意图;
图3为本发明机械臂安装侧视示意图;
图4为本发明机械臂安装俯视示意图;
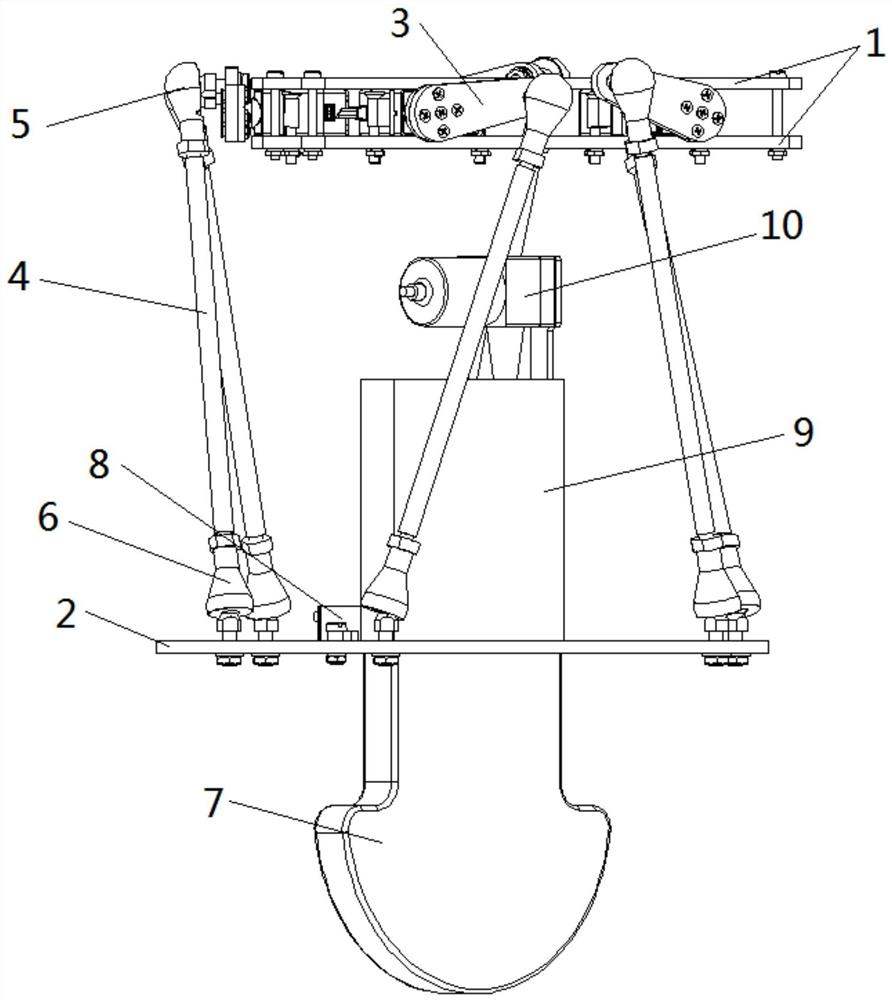
图5为本发明机械臂安装正视示意图;
图6为本发明定平台示意图;
图7为本发明动平台示意图;
图8为本发明舵机转臂示意图;
图9为本发明连接柱示意图;
图10为本发明套盖内部示意图。
图中标号为:1-定平台1;2-动平台;3-舵机转臂;4-连接柱;5-上球铰;6-下球铰;7-彩超探头;8-倾角传感器;9-套盖;10-位移传感器。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
实施例一
根据示图1-5,初始状态下,定平台1与机械臂末端连接,定平台1与机械臂的支撑板通过螺栓连接组装,6个舵机(本方案中选用的舵机驱动,相比于常见的电动推杆驱动,体积更小,成本更低,更易于控制,根据计算,本方案拟选用RC30P型号的舵机,每个重约60g,舵机的使用在很大程度上减小了整体机构的体积和重量,为舵机转臂3的硬件和控制减轻了负担)固定于定平台1夹层边沿之间,舵机为末端执行器的驱动输入,由上位机发出的电信号驱动舵机输出相应的旋转角度,每个舵机的输出轴带有一个舵机齿盘,舵机的输出端通过舵机齿盘固定安装舵机转臂3,舵机齿盘用于连接舵机和舵机转臂3,舵机旋转的角度即为舵机转臂3旋转的角度,舵机转臂3的另一端,通过上球铰5与连接柱4的上端连接,连接柱4的下端连接动平台2上的下球铰6,这样在舵机带动舵机转臂3工作的时候,受连接柱4与上球铰5、下球铰6的作用,动平台2被移动起来,这样动平台2上的彩超探头7就可以在孕妇的肚子上活动探测,动平台2的作用是搭载彩超探头7,以及安装位移传感器10、倾角传感器8和弹簧,位移传感器10和倾角传感器8实时提供末端执行器的姿态,用以确认彩超探头7相对于人体表面的位置,详细的:当舵机收到电信号,旋转提供输入时,舵机转臂3旋转相同的角度,舵机转臂3的旋转,通过上、下球铰带动连接柱4的移动,6个舵机可以同时旋转不同的角度,从而6根连接柱4也可以运动至不同的位置,不同的角度6根连接柱4的不同位置和姿态,决定着由连接柱4所牵引的动平台2的位置和姿态,从而达到调整彩超探头7位置的目的,彩超探头7与动平台2之间用弹簧连接,为柔性连接,搭配位移传感器10的使用,可以实时获得贴合人体的压力大小,为患者体表柔性贴合的同时,施加了机械保护;
实施例二
根据示图6,定平台1是固定整个末端执行器在机械臂末端的连接件,整体考虑轻量化设计的原则,且此应用场景为轻载,因此建议采用铝合金的材料,定平台1周边的螺纹孔用来固定舵机支撑板,中间的圆形大通口用以连接机械臂末端的连接件;
实施例三
根据示图7,动平台2用以连接彩超探头7,在机构上与连接柱4下端的下球铰6(直杆型球头杆端关节球铰)相连,对于动平台2,所受的静载荷小于定平台1,但也会受到来自于彩超探头7在诊断期间的动载荷的作用,根据计算分析,最大动载荷为8.01N以及横向力为4.25N;
实施例四
根据示图8,舵机转臂3由铝合金材料制成,密度更小,舵机转臂3的外形设计如图所示,根据临床检测需求:彩超探头7能够沿Z轴延伸5.22mm,横向平移7.75mm,能够绕X和Y旋转5.08°,因此设计的舵机转臂3旋转高度差为30mm;
实施例五
上球铰5,本设计中舵机转臂3另一端的外侧活动连接上球铰5,上球铰5与连接柱4的上端固定连接,其中,与舵机转臂3相连的上球铰5,选用弯杆型球头杆端关节铰链,末端执行器沿Y方向承受的最大横向接触力为4.43N,沿着X向承受的最大静载荷为40N,平均轴向力为8.01N,均为轻载情况,远小于弯杆型球头杆端关节铰链的额定载荷,在满足额定静载荷的情况下,基于轻量化的设计准则,以及为了获得最大的转角α,因此最优选用SQG6型号的球型铰链;
下球铰6,动平台2的上方活动安装下球铰6,下球铰6与上球铰5数量对应、位置交叉,下球铰6与连接柱4的下端固定连接,与动平台2连接的下球铰6,选用直杆型球头杆端关节铰链,动平台2上连接的下球铰6主要承受动平台2的静载荷以及彩超设备诊断时候的动载荷,在轻载荷情况下,考虑轻量化设计以及更大转角的原则,这里最优选用的是SQZ6型号的直杆型球头杆端关节铰链;
实施例六
根据示图9,连接柱4是动平台2和定平台1之间的连接部件,首位相接与两个球铰,通过球铰与定平台1和动平台2相连接,基于轻量化设计的准则,且此处应用场景为轻载,最大横向载荷为4.25N,最大轴向力为8.01N,动平,2整体负载拟定位40N,最后最优选用连接柱4采用1060C铝合金制作,连接柱4头尾部分需要加工外螺纹,这样方便与上球铰5和下球铰6连接;
实施例七
倾角传感器8的选用,最优选用BWK226型的数字型双轴倾角传感器,该款传感器常用于医疗器械领域设备的倾角监测;
位移传感器10的选用,为保证结构紧凑,并符合线性测量位移的特点,采用拉绳位移传感器的方法,传感器一端接在彩超探头7的底部,测量弹簧位移,得到数据并由上位机分析后,最终得到彩超探头7接触人体表面时的接触压力,保证患者的安全,此处最优选择米朗的MPSFS-S型号,50mm量程的拉绳位移传感器;
根据示图10,彩超探头7压在孕妇肚子上,下压移动的时候,产生位移,弹簧具有一定的柔性,可以随着彩超探头7的移动伸缩,并通过位移传感器10的数据反馈,由胡克定律换算成压力,进而实时得到彩超探头7对患者身体表面的接触压力大小,且位移传感器10、倾角传感器8进行位置信息反馈,实现闭环控制,弹簧与位移传感器10的配合使用,机械保护与电气保护相结合,提高机构的安全性。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种并联式彩超操作机器人末端执行器
- 机器人的末端执行器在一末端执行器姿势与另一末端执行器姿势之间转移的方法和系统