混杂模型工业过程约束鲁棒预测控制综合优化设计方法
文献发布时间:2023-06-19 11:49:09
技术领域
本发明涉及自动化技术领域,具体为一种基于混杂模型的工业过程新型约束鲁棒模型预测控制综合优化设计。
背景技术
随着对产品质量和运行安全的要求越来越严格,工业过程控制正面临着严峻的挑战,不确定性和扰动也对改进的控制方法提出了更加严格的要求,并且设计控制器时除了需要考虑提高产品质量,同时还要考虑从有限的资源中不断挖掘潜力以实现节能降耗,最大化经济效益,并要降低污染,确保生产过程的安全性等诸多因素。因此控制器的设计问题,变成了各种不同形式的控制目标和控制约束的问题。
目前的传统控制理论难以满足这一要求。因此,亟待发展一种有效的控制方法来满足实际的工业需要,模型预测控制正是在这种背景下应运而生。模型预测控制(MPC)具有模型精度要求低、鲁棒性强、抗干扰性强、在线计算方便、而且能够在优化控制理论的框架内很好的处理系统的约束的特点,在实践中得到广泛的应用。针对具有执行器部分失效和未知扰动的复杂工业过程,本申请提出了一种基于混杂模型的新型约束鲁棒模型预测控制综合优化设计方法。
发明内容
本发明的目的在于提供了一种混杂模型工业过程约束鲁棒预测控制综合优化设计方法,以处理具有执行器部分失效和未知扰动的复杂工业过程。
为实现上述目的,本发明提供如下技术方案:混杂模型工业过程约束鲁棒预测控制综合优化设计方法,包括步骤1:针对工业过程所给出的多个单输入单输出的输入输出模型,构建一个由状态变量、输出误差及与输出误差相关的新的状态变量构成的且其状态能够被各自调整的新型状态空间模型;
步骤2:设计新型控制器。
与现有技术相比,本发明的有益效果是:针对具有执行器部分失效和未知扰动的复杂工业过程,本申请提出了一种新型约束混杂鲁棒模型预测控制综合优化设计方法。构建了由状态变量、输出误差及与输出误差相关的新的状态变量构成新型状态空间模型。基于此模型所设计的控制律因其状态能够提供更多的自由度使得所考虑的系统即使在故障及干扰共同影响下,依然具有较好的控制性能。不管是针对单模型这种特例控制还是针对具有普遍意义的多模型的控制,本申请所提供的方法下,系统运行更加平稳,系统输出更加贴近于设定值。
附图说明
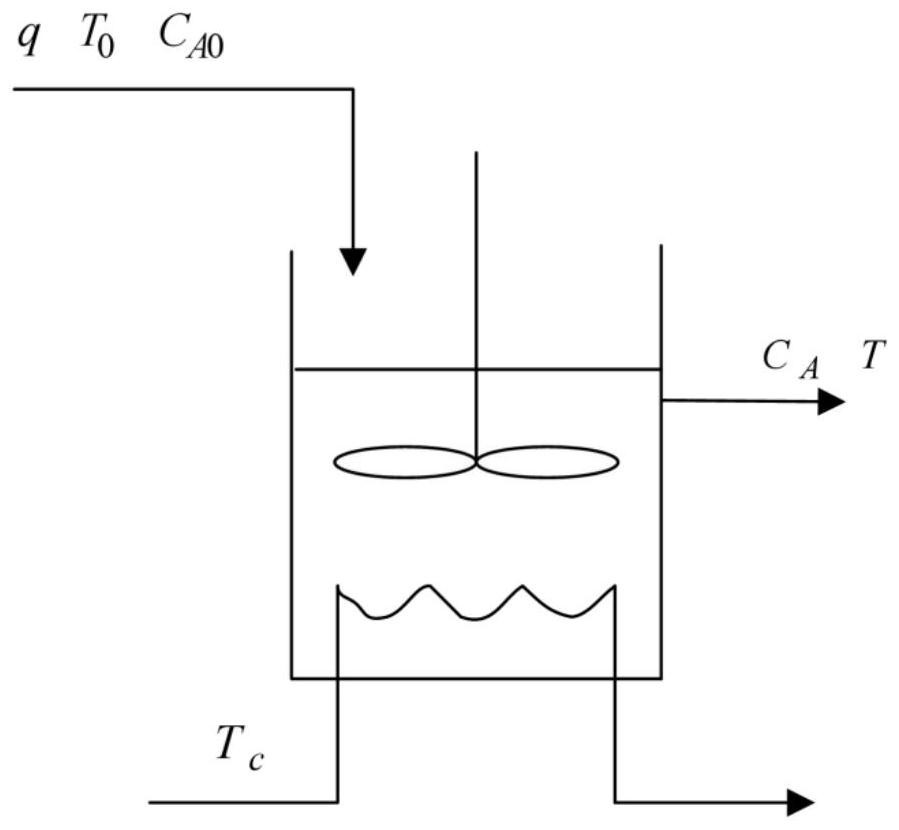
图1为本发明所应用的非线性连续搅拌釜反应器。
图2a为本发明不同方法下的输出跟踪比较图。
图2b为本发明不同方法下的反应物浓度比较图。
图2c为本发明不同方法下的输入比较图。
图2d为本发明不同方法下的误差比较图。
图3a为本发明不同方法下的输出跟踪比较图。
图3b为本发明不同方法下的反应物浓度比较图。
图3c为本发明不同方法下的输入比较图。
图3d为本发明不同方法下的误差比较图。
图4a为本发明不同方法下的输出跟踪比较图。
图4b为本发明不同方法下的反应物浓度比较图。
图4c为本发明不同方法下的输入比较图。
图4d为本发明不同方法下的误差比较图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明提供一种技术方案:混杂模型工业过程约束鲁棒预测控制综合优化设计方法,包括
步骤1:针对工业过程所给出的多个单输入单输出的输入输出模型,构建一个由状态变量、输出误差及与输出误差相关的新的状态变量构成的且其状态能够被各自调整的新型状态空间模型;
步骤2:设计新型控制器。
步骤1的具体步骤为
1.1描述模型
对于复杂的工业过程,常常可表示成如下含不确定性不同模态单输入单输出离散传递函数:
其中y(k)和u(k)分别是k时刻的输出和控制输入;
选取相关状态空间向量:
对上述(2)式多模态离散系统模型做进一步处理,可转化为:
对于这种多胞型的多模系统,模型预测控制最常用到就是直接设计状态控制器,即Δu(k)=K
1.2构建新型拓展模型
基于(4),引入系统跟踪误差e
e
其中r
考虑到(4),新的状态空间模型不同于上述单模型曾提到的状态空间模型,其设计不仅同时包含输出跟踪误差e
将扩展动态模型、状态变量和跟踪误差相结合,得到新的扩展状态变量如下:
在此基础上,构建新型的状态控制模型;上述的i代表的是不同模态,则第i模态新型扩展状态空间模型为:
其中
这里
将上述系统(10)的模态表示再现为切换系统
其中υ(k):
对于:
G
表示在i模态与系统状态相关的切换条件;
在系统状态已知的情况下,系统的切换时间变得尤为关键,当系统处于任意时刻任意批次的i模态时,一旦满足切换条件G
T
其中T
∑={(T
定义τ
步骤2的具体步骤为
2.1基于所述的扩展模型(10),根据相应模态选取相关性能指标:
满足如下约束条件:
在这里将(17)式中的性能指标划分为有限时间和无穷时间两部分,分别用如下两种形式表述:
使得式(17)对所有的i=0,1,...,N-1;
使得式(17)对所有的i≥N;
很显然,关于控制律的设计这里又采用了切换策略;对于无限时域约束最小-最大优化问题,引入如下状态反馈控制律:
Δu
其中F
2.2求取控制器的增益F
V
其中
对于每一个模型i,存在L正定对称矩阵
对于
由于,
V
对此不等式从i=N,N+1,...∞求和,结合(20)及(22)得:
因此(20)式中的优化问题可转化为求取V
根据扩展状态空间模型(12),在第i模态,可得状态空间预测模型表达式:
上述(25)式可被简化为:
上式(24)中的性能指标可改写为如下形式:
其中
由(22)可得如下不等式:
令
则(27)式的性能指标可被写为:
其中(28)-(30)式均满足(18)式的约束条件;
应用Schur引理,将(28)-(30)式转化为线性矩阵不等式(LMIs);
其中
因此(28)式转化为如下LMIs形式:
其中,t=1,2,...,L;l=1,2,...,L
与(9)式相同,
则(29)式可描述为如下LMIs形式:
与(9)式相同,
同理,(30)式可用如下LMIs描述:
因此(31)式代价函数可改写为:
对于(32),(35)和(38)约束条件如下:
2.3对于如上约束本专利分两部分进行讨论,在区间[0,N-1]的控制输入量被
其中
在[N,∞]区间的控制输入量被(24)式的反馈控制律参数化,为了满足所述的(21)式中所有i≥N的约束条件,且保证系统的稳定性,存在L个对称矩阵
其中
因此整个优化问题可表示为如下形式:
受制于(32)(35)(38)(41)-(43)
系统状态从一个模型切换到相邻的另一个模型需满足如下条件:
V
对于系统(12)平均驻留时间满足下述不等式的切换信号,则其指数稳定;
如前文描述,τ
在切换条件满足下,根据条件(45)可得:
由(47)和(48)可知:
根据条件(47),可得:
其中0<β
τ
显然由(51)式可知:
取
因此若满足条件(45)和(46)则有离散系统(12)在切换信号υ(k)下指数稳定。
下面对本发明作进一步说明;
请参阅图1,考虑多模控制,以非线性连续搅拌釜反应过程控制(CSTR)为例,调节手段是控制反应温度。
其模型可表示如下
其中C
可获得如下状态空间模型:
其中
在理想运行条件下,约束为T
结果如下表
表1.针对CSTR获得的分段线性模型
控制目标是让反应堆温度遵循设定值曲线:
下面,我们将从不同的情况分析系统控制性能。
1).完全匹配情况(情况1)
请参阅图2a、b、c和d,在这种情况下,图2(a)是输出跟踪比较图,为显示其各自方法的控制效果,在三个切换点120(s),300(s)和480(s)中前两个切换点处进行局部放大。放大后可发现,采用本申请提出的控制算法,输出虽会出现微小波动,但明显系统的输出更加贴近于设定值,控制精度更高。这种控制效果从跟踪误差图2(b)也能看出,本申请提出的方法下,误差除了在切换点处变化大外,其余时间变化很小,且即使在切换点处,我们的方法下,误差变化也是较小的。图2(c)是反应物的浓度比较,整个过程中明显是我们的方法需要的浓度变化比较平缓。图2(d)是系统输入曲线,在切换点处,明显的本专利所采用的方法控制输入信号变化较大,但很快趋于平稳。
2).不匹配情况-常值故障及随机干扰(情况2)
请参阅图3a、b、c和d,这里执行器故障取为α=0.6干扰取幅值为0.03的随机干扰。总体来说,尽管在出现上述情况下,系统控制性能有所下降,但是都在其可控制的范围内,依然是本申请的控制效果好,控制精度高。
3).不匹配情况-时变故障及随机干扰(情况3)
请参阅图4a、b、c和d,对于时变故障,我们取为α=0.5+0.2sin(t)及干扰不变。与图3相比,各类曲线明显波动较大,控制性能再次降低,但依然是我们提出的算法使得系统控制效果好,运行更加平稳。
综上所述,本专利所设计的控制方法可更好解决系统内部不确定性,从而使系统运行更加平稳,在引入扩展动态模型后,稳态跟踪误差可更快趋于稳定,并且系统输出量可更加贴近于设定值达到更高的控制精度。
- 混杂模型工业过程约束鲁棒预测控制综合优化设计方法
- 基于鲁棒约束模型预测控制的UUV对线控位回收方法